基于LoRaWAN的核電建設期車輛管理系統
2020-10-27 09:46:47毛鐸陪李英
中國信息化 2020年8期
毛鐸陪 李英
為了實現核電建設、調試階段的車輛動態管理,設計核電建設期車輛管理系統。基于物聯網遠程通信技術,采用LoRa技術構建具有抗干擾能力好、穿透力強、通信遠距離的雙向通信和定位系統。系統硬件平臺以SX1278射頻芯片為通信單元,在MCU的控制下,星形網絡作為通信組網的基本架構,使用GPS(北斗)雙模定位技術,在LoRaWAN協議的支持下,實現車輛的遠程通信和定位功能。
目前核電建設廠區大,施工單位較多,車輛多,種類復雜,管理難度大,特別是特種車輛,需要定期檢驗,對操作人員資質有要求,需要實時關注其動態信息;廠區內對供電有較嚴格管制,在通訊方面,有線網絡很容易受到施工影響(挖斷、壓斷等),無線網絡受制于通訊距離、用電和安規要求。LoRa技術作為一種物聯網遠程通信技術,兼顧了低功耗、遠距離、低速率、低成本和大規模組網的特點,具有抗干擾能力強、障礙物穿透性好的優勢。針對現場的實際情況,采用LoRa技術所具有的遠程通信,結合GPS(北斗)定位技術,構建核電建設現場的車輛管理系統,結合廠區GIS地圖,實現按區域劃分的24小時不間斷監督和管控。
一、系統設計
(一)系統組成和基本功能
該系統用于管理廠區內車輛分布、定位、行駛情況,也可查看車輛的歷史行駛軌跡,整個系統主要由定位終端、通信基站(網關)、網絡服務器和管理系統、GIS服務器等組成,其中定位終端若干個,通信基站若干臺,網絡服務器一臺,管理系統若干臺,GIS服務器一臺。系統網絡架構如圖l所示。
主要功能:一是一鍵定位(打卡)功能,按鍵后立即啟用GPS(北斗)定位,并把當前坐標傳回服務器;二是人員車輛定位,終端定期自動進行GPS(北斗)定位,并把坐標通過Lora基站傳回服務器;三是結合廠區GIS地圖,將廠區劃分區域,進行網格化管理;四是特種作業(如動火作業、吊裝等)時可在線監督施工人員、安全監督人員的配備、到位、執行情況,特種車輛管理的定期檢修和超期提醒,并在GIS地圖上顯示。

(二)系統工作原理
2013年8月,美國Semtech公司研發出一種新型物聯網遠程單跳組網技術——“LoRa技術”,它采用擴頻調制解調、前向糾錯編碼和數字信號處理等技術,解決了低功耗和遠距離通訊難以兼得的難題,并研發了SX126X、SX127X系列終端芯片,SX1301網關芯片。LoRa技術具有低功耗、遠距離、低速率、低成本、大規模組網 明顯的技術優勢,其以星形網絡為基本通信架構,在免費的非授權頻段工作(470~518MHz),傳輸速率為0.3~36.5 kbit/s。在開闊環境下面通信距離達到10Km,復雜環境下可達2KM,具有抗干擾能力強、穿透性好等優點,適合核電建設現場。
車輛定位終端體積小重量輕(如銀行卡大小,重量50g左右),配備大容量聚合物鋰電池,可使用手機、移動電源等進行充電,終端根據默認設定、電量、充電情況自主切換傳輸頻率,也可接收遠程指令自行調整發送頻率。
二、硬件平臺設計
LoRa硬件通訊平臺是本系統的核心組件之一,主要包括車輛佩帶的定位終端和數據透傳的基站。定位終端硬件模塊如圖2所示,由MCU模塊(集成藍牙)、SX1278射頻處理模塊、執行單元、電源模塊、GPS模塊等組成。
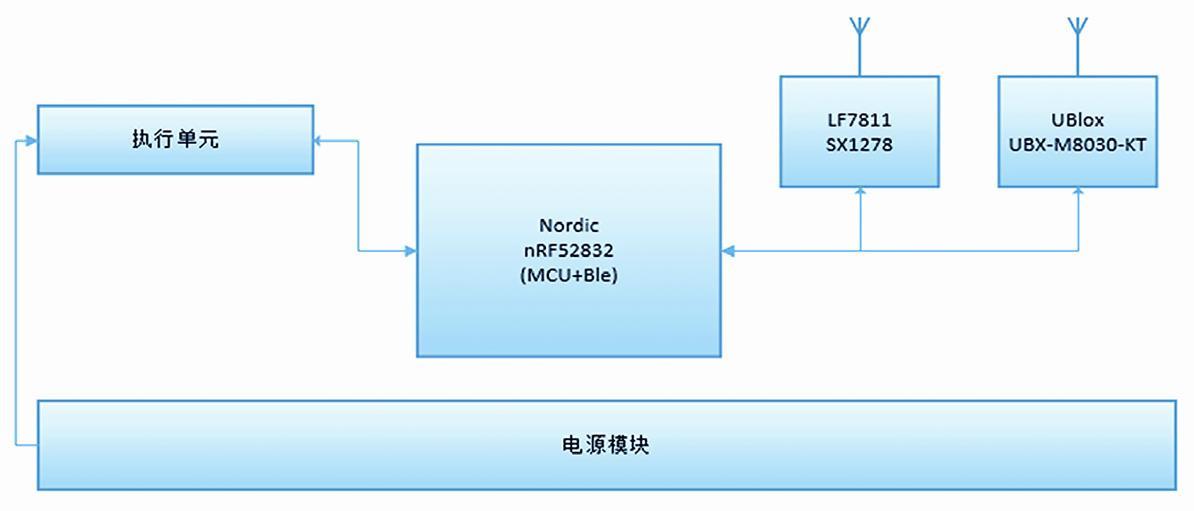
Nordic nRF52832 是一款功能強大,高度靈活的超低功耗多協議的低功耗藍牙處理模塊,它是一款帶有浮點運算單元的ARM Cortex-M4 32位處理器,工作頻率64MHz,Flash 512KB, RAM 64KB的處理器模塊,同時它也是一款在低功耗模式下的靈敏度-96 dBm,-20至+4 dBm TX功率可調的藍牙采集模塊,同時集成可以支持多協議,包括ble藍牙低功耗,ANT和2.4GHz專有協議;現場安全監督人員進行巡視時,使用管理APP,可感知10~20米內車輛信息,快速進行合規作業甄別(如作業許可、人員資質等方面)。
LF7811 LoRa數據傳輸模塊,封裝一顆Semtech的LoRa SX1278芯片,采用高精度的晶體和物料即可獲得超過-139dBm 的高靈敏度,與+18.6dBm 功率放大器的集成使這些器件的鏈路預算達到了行業領先水平;
GPS+北斗定位單元定位模組,采用u-blox新一代UBX-M8030-KT方案的模組,是一款支持BDS B1/GPS L1/GlONASS L1頻點(三選二)雙模導航定位模塊。模塊內部集成了u-blox方案的新一代可支持BDS B1/GPS L1/GLONASS L1頻點SOC基帶+射頻一體芯片,模組可以跟蹤多達72個通道的同時,在弱信號環境下快速TTFF定位。
MCU通過SPI總線與UBX-M8030-KT進行通訊,獲取GPS坐標,再通過SPI總線與SX1278進行通訊,將GPS坐標信息等傳遞出去,MCU通過URAT總線與執行單元進行通訊,在接收到基站發送的指令后,進行相關參數調整。電源模塊直接為其它模塊供電,由于采用低功耗設計,一般電池可以使用40小時以上(通訊頻次較高)。
基站是整個通訊的中心與關鍵,起到了數據傳輸的橋梁作用,采用SX1301芯片,上行8通道下行1通道,采用POE供電。
三、定位技術
基于LoRa技術的定位方案主要有兩種:1、通過基站讀取接收信號強度值RSSI,2、通過基站接收無線信號傳輸時間差(TDOA);兩種定位方式各有優缺點,但是定位精度都比較低,受外界環境干擾比較大(遮擋、反射等),鄉村環境實現30米精度,城市環境實現150米精度,對于核電建設廠區,30米精度已無法滿足現場管理要求,因此引入GPS(北斗)定位,采用u-blox新一代UBX-M8030-KT模組,其理論精度在2.5CEP,實際測試在5米左右,已經基本滿足現場需要。

四、應用系統
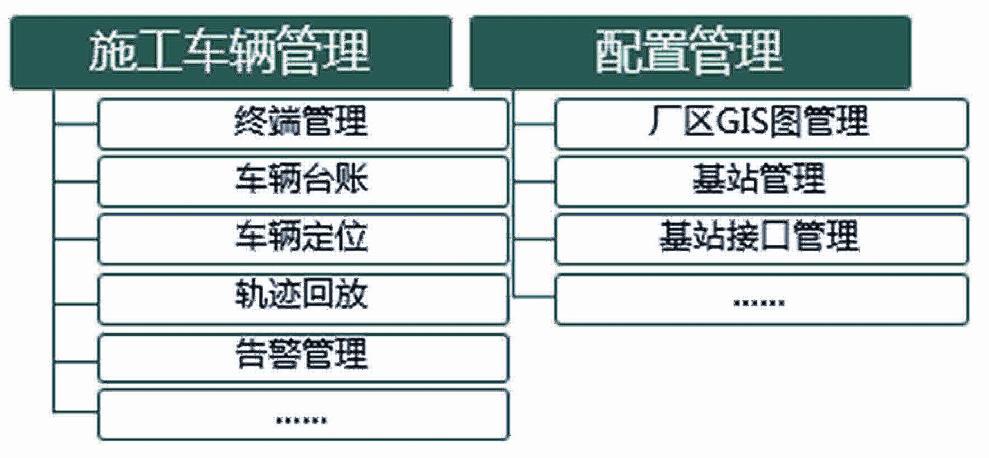
系統采用了B/S架構RESTful風格,前后臺剝離,所有的數據最終都匯集到管理系統進行存儲、分析和處理。應用系統軟件由三個模塊17個應用組成,相互協作完成車輛定位管理功能。應用系統模塊結構如圖4所示。整個應用系統核心采用GPS(北斗)定位,通過LoRaWAN進行低功耗遠距離傳輸。
五、結束語
基于LoRaWAN技術的車輛定位管理系統,充分發揮了LoRa技術低功耗、低成本、遠距離、抗干擾能力強、穿透好的特點,結合GPS(北斗)定位技術,實現了在復雜環境下雙向通信,同時兼顧了車輛定位功能,其定位精度達到5m的水平,具有較好實用價值,并且可以以定位管理為基礎擴展對車輛的管控,如車輛進退場、車輛基本信息管理、車輛軌跡追溯等,將有利于提高核電建設現場車輛的管理水平。
作者單位:國核工程有限公司
基金項目:國家重大專項課題2018ZX06002002《CAP1400核電關鍵建造調試技術研究》