基于蜂群測控資源智能管控的無人機區域組網技術研究
2020-10-28 07:12:22賀渝兵曾國奇孫志剛
無線電工程 2020年11期
賀渝兵,曾國奇,宗 茂,孫志剛
(1.中國電子科技集團公司第五十四研究所,河北 石家莊 050081;2.北京航空航天大學 無人系統研究院,北京 100191)
0 引言
近年來,隨著越來越多的大型無人機平臺、遙感載荷、空中遙感控制子系統及地面數據接收等方面關鍵技術的突破,標志著我國高端無人機遙感系統產業化的開端,填補了民用無人機遙感領域的空白[1]。2008年5月,四川汶川地震中,無人機航拍視頻影像為制定抗震救災方案提供了科學依據[2]。任務分配使得有限的遙感應用資源發揮最大的使用效能[3]。考慮使用無人機蜂群構成應急指揮系統網絡成為了重要的組網應用解決方案[4]。
隨著無人機編隊組網技術的迅速發展,無人機協同組網應用領域迎來寶貴機遇[5],特別是在面向任務的蜂群測控資源管控領域的應用[6],蜂群組網技術的研究帶來了新的融合與發展,為無人機蜂群遙感提供了有利工具[7-8]。傳統無人機遙感信息采用單無人機平臺、單一載荷平臺、單一傳感器和固定角度作業方式,對目標的描述能力不足以支撐立體成像、協同遙感等應用。本文基于高頻次迅捷無人機區域組網遙感信息獲取的觀念,在保留了傳統光學傳感器遙感信息平面觀測技術的基礎上,更強調符合空間遙感對地觀測領域發展趨勢的異構無人平臺、輕小型商用飛行器光學相機、長航時輕小型高分辨率SAR成像、浮空平臺廣域全景監視影像多源數據融合方式,獲取生態環境、洪澇災害和國土安全的應急觀測信息,能夠從根本上解決傳統遙感信息由于對應急減災觀測能力不足而導致的諸多應用難題[9]。深入挖掘航空遙感組網對地觀測的應用潛力,實現無人航空器遙感觀測網絡對生態環境、洪澇災害和恐怖襲擊事件的高頻迅捷觀測,提出了無人航空器與傳感器資源的適配指標體系,對有效指導各個應急減災活動中無人航空器資源的有效配置有著重大意義。
1 蜂群測控資源智能管控方法分析
1.1 面向任務的蜂群無人機飛行任務規劃技術
面向任務的蜂群無人機飛行任務規劃涉及的技術難點包括自主編隊、隊形保持、隊形重構和覆蓋評估。首先采用無人蜂群飛行任務規劃算法依據遙感任務要求、飛行平臺能力、任務載荷工作方式自動生成預設飛行航線,飛行過程中通過組網數據鏈實時生成飛行重規劃自動生成重規劃飛行航線,解決異構無人平臺遙感任務能力存在的差異[10]。依據蜂群無人機平臺飛行任務解算能力設計蜂群無人機編隊保持和評估策略,分別控制采取平臺自主保持和編隊重規劃航點保持策略,消除飛行過程中由于受到外部干擾產生的隊形位置偏差,或者當任務需求變化或者蜂群中單臺無人機突發故障時,實現實時和可靠的蜂群無人平臺的隊形保持、隊形重構和覆蓋評估。
面向任務的蜂群無人機飛行任務規劃涉及的規劃算法包括“長機-僚機”跟隨、蔽障決策和虛擬位置點。所有蜂群無人機預先狀態航路依次起飛,并在指定時刻和指定空域構成松散隊形,蜂群飛行任務規劃實施控制蜂群無人機形成對地區域進行搜索和偵察的能力,以確保多無人機在多任務執行過程中的協同性[11]。根據蜂群無人平臺計算能力的不同,由特定無人平臺作為長機,接收飛行任務規劃預設航路、任務控制策略和接收操作員直接控制命令,僚機的控制策略設置為根據長機位置、航向和對應要求計算本機的相對位置,實現蜂群無人機隊形保持、規避障礙物和虛擬位置導航,從而提高蜂群無人機任務執行效能。
目前民用無人機通常僅攜帶可見光攝像機即可滿足航拍、遙感等簡單任務,但軍事、商用領域高端無人機為了實現對特定區域的遙感任務,通常需要攜帶多種傳感器載荷來滿足任務區域滯留時間、掃描重疊率等條件。不同傳感器的作用范圍不同,電子探測載荷往往作用距離遠,但是分辨率較低;SAR雷達載荷作用距離遠,但工作模式為側視;地質、氣象探測類載荷工作方式特殊,工作距離差距較大。無人機任務載荷規劃需要在滿足最遠飛行距離的約束情況下,對無人機飛行的高度、速度和載荷開關動作等航線屬性進行優化配置,避免任務載荷的重復動作,提高無人機執行任務的可靠性和安全性。
針對光學載荷的遙感任務進行無人機任務載荷規劃設計,光學載荷針對不同類型任務目標的遙感方式也不相同,任務目標主要分為點式目標和區域目標2類。
點式目標是指單次或較少的拍攝次數即可完成整體目標范圍遙感覆蓋的小范圍區域目標,主要應用于固定點遙感監視。點式任務目標的載荷覆蓋可以采用盤旋和“穿越迂回”2種方式:采用盤旋方式探測單點目標時,無人機在任務區域需要持續改變載荷云臺方位角與俯仰角,實現載荷視角始終保持在任務區域;而采用“穿越迂回”方式探測時,改變無人機狀態過于頻繁且覆蓋時間不夠,有部分運行區間無法完成載荷覆蓋,現在已經較少使用,大部分采用任務區域盤旋或者直接穿越任務區采集的模式。具體載荷覆蓋方式如圖1所示。
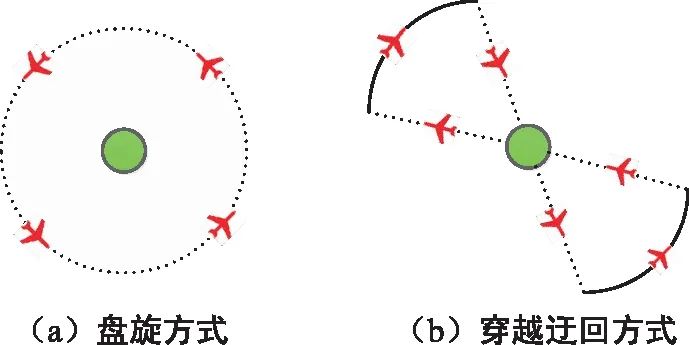
圖1 針對單點任務目標的載荷覆蓋方式Fig.1 Payload coverage for a single point of mission
為了最大化利用無人機任務執行性能,針對點式目標的任務較少,多數是針對區域目標的載荷任務。區域任務目標是指需要多次循環掃描才可完成整體目標范圍探測覆蓋的范圍區域目標,主要有航拍采集、災害評估、區域搜索等應用。針對區域目標的載荷覆蓋方式有很多,常見的有光柵掃描、盤旋掃描和迂回掃描等方式,如圖2、圖3和圖4所示。
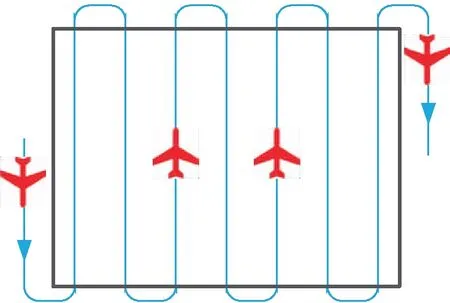
圖2 針對區域任務目標的光柵掃描載荷覆蓋方式Fig.2 Raster scan load coverage mode for regional mission targets
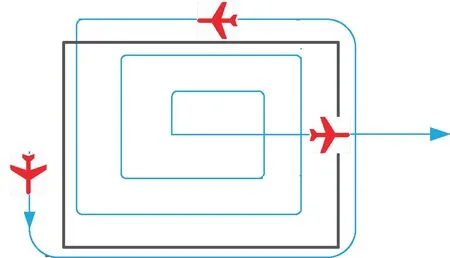
圖3 針對區域任務目標的盤旋掃描載荷覆蓋方式Fig.3 Hovering scan load coverage mode for regional mission targets
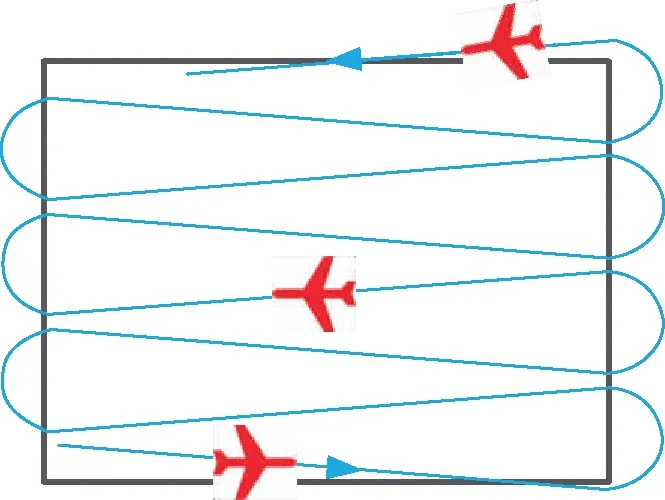
圖4 針對區域任務目標的迂回掃描載荷覆蓋方式Fig.4 Roundabout scanning load coverage for regional mission targets
其中,光柵掃描和盤旋掃描2種載荷覆蓋方式主要用于完成一定橫向重疊率的全區域覆蓋,而“迂回”掃描式載荷覆蓋方式可以滿足搜索任務區域垂直于掃描方向且滿足于一定速度范圍的移動目標搜索任務。
根據遙感目標區域要求,氣候禁飛區、環境等要求,將遙感任務分配到多個無人機,完成多任務的分配,如圖5所示。

圖5 多點多任務分配軟件界面Fig.5 Multipoint and multitasking software interface
1.2 蜂群無人機飛行任務實時監控技術
針對蜂群無人平臺載荷功能限制和個體任務互補性特點,設計蜂群無人平臺采用集中控制、分布控制和獨立控制方式,需要解決資源共享、通信協同、任務分配和避障防撞等問題,飛行任務規劃實現分為3個層次,包括組織協調層、指令執行層和任務決策層。蜂群指揮中心實時監控蜂群無人機平臺,采用蜂群飛行任務規劃算法,實現自主編隊、隊形保持、隊形重構和覆蓋評估。蜂群無人平臺組網數據鏈實時傳輸無人協同狀態、協同命令。協同控制策略和算法分別集成在蜂群控制中心和蜂群無人平臺,實現蜂群無人機飛行任務實時監控任務,如圖6所示。
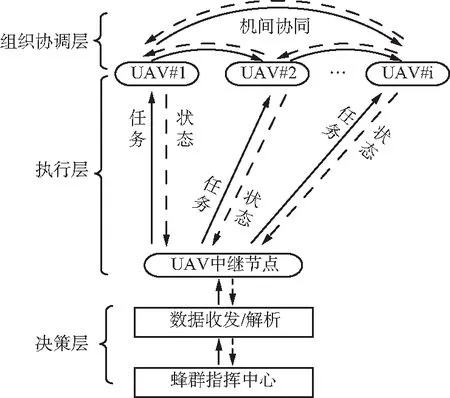
圖6 蜂群無人平臺控制系統結構Fig.6 Control system structure of unmaned bee colony platform
當無人機上行遙控指令被認為是正常接收和響應條件下,遙測數據作為飛行任務實時監視依據時,有必要以遙控指令和目標無人機的六自由度模型為依據,以遙控指令作為六自由度模型的輸入,六自由度模型的輸出作為與當前遙測數據比對的依據,如圖7所示。

圖7 遙控指令推測遙測數據流程Fig.7 The remote command predicts the telemetry data flow
在前期的工作中,已建立起了一套較為完善的蜂群無人機六自由度數學模型,通過無人機數學模型與真實無人機飛行狀態的同步仿真,不斷輸出仿真遙測狀態數據作為比較的依據。當然,仿真遙測數據與真實飛行遙測數據的相等屬于同一個上下界范圍意義的相等,上下界的確定則直接依賴于監視專家系統的知識庫,如圖8所示。
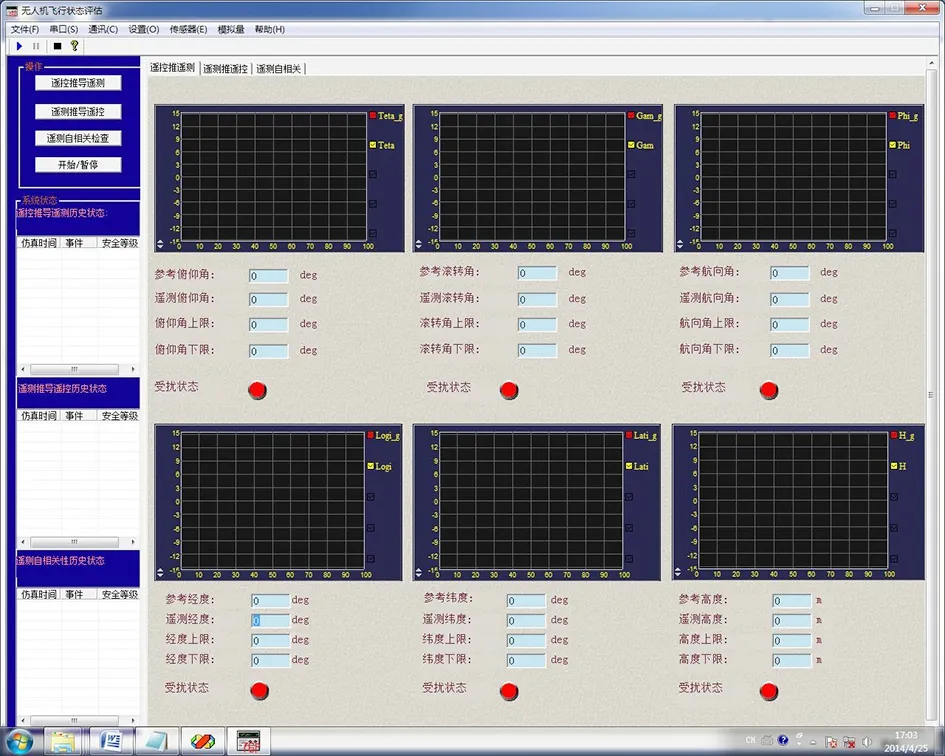
圖8 飛行任務實時監視軟件界面Fig.8 Flight mision real-time monitoring software interface
1.3 蜂群無人機任務分發應用技術
蜂群無人機任務分發應用示意如圖9所示。
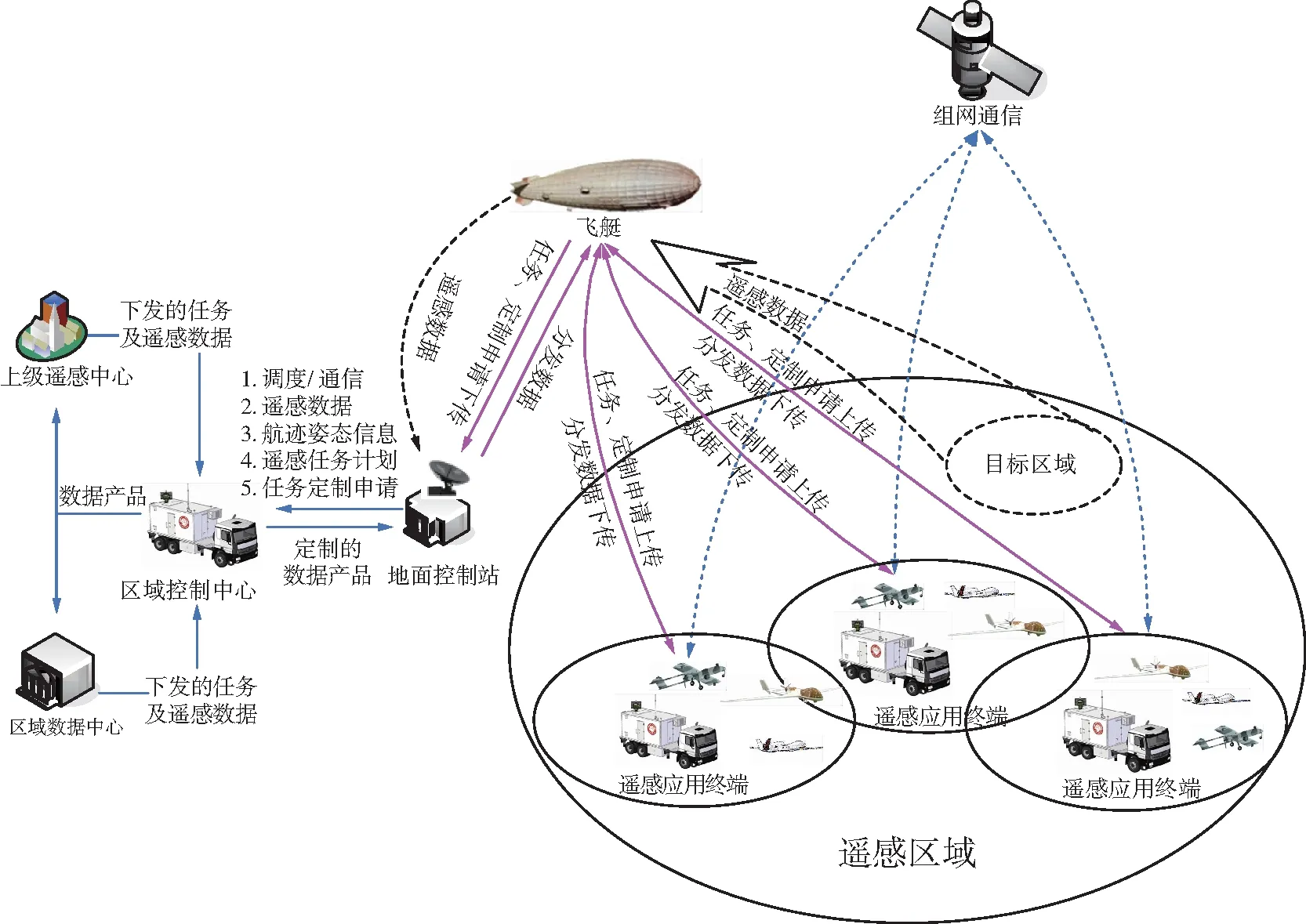
圖9 遙感任務數據分發應用示意Fig.9 Schematic diagram of situation information distribution application
任務分發系統由指揮中心、區域分中心和臨場指揮中心三級遙感觀測區域組網動態協同控制系統組成。臨場指揮控制系統包括浮空平臺遙感應用系統和區域遙感應用系統組成,其中遙感數據無線分發由遙感應用產品地面終端、機載終端以及用戶應用終端組成,數據終端和用戶應用終端由收發信機、計算機以及遙感軟件組成。
數據終端部署于遙感應用輕小型無人機、長航時無人機及飛艇等異構無人平臺機載終端上,用戶應用終端是地面固定式以及車載式控制站,依據蜂群無人平臺應用于生態環境、洪澇災害和國土安全的應急觀測的不同需求,通過接收用戶應用終端的遙感定制申請,并將遙感調度命令、遙感觀測數據、無人平臺位置信息技術飛行任務規劃等轉發給用戶應用終端,用戶應用終端結合地理信息數據庫,以三維的方式動態顯示遙感數據覆蓋率和遙感區域信息,包括蜂群無人平臺航跡、載荷覆蓋區域及覆蓋率分析等。同時各級用戶應用終端還可以根據蜂群無人機平臺組網方式實現即時通信和遙感信息共享,提高任務分發效能。
1.4 蜂群無人機任務自組網技術
根據蜂群無人機協同組網的遙感觀測模式和應用需求,研究建立由物理層、數據鏈路層、網絡層構成的蜂群無人機數據鏈自適應網絡層次架構,構建具有可擴展的、高動態的網絡局部同步的自適應蜂群數據鏈網絡體系[13]。
蜂群無人機自組網技術包括網絡同步、節點入網、節點退網和信息資源分配。蜂群內節點根據長機節點進行同步,由入網節點發送入網、退網申請,長機接收應答后入網、退網成功,蜂群節點采用競爭方式實現入網、退網請求,蜂群節點由控制站對各個節點的信道資源申請進行處理和分配,并將結果下發至各個蜂群節點。
蜂群測控動態組網協議示意如圖10所示。接入階段網絡時間基準節點周期性發送接入輪詢幀,詢問是否有節點需要接入。機載通信設備入網時首先偵聽信道,收到網絡時間基準節點發送的接入輪詢幀后隨機發送入網請求。如果2套機載通信設備同時發送請求幀、發生碰撞,網絡時間基準節點不能正確接收,則在下個幀周期繼續發送請求。網絡時間基準節點收到接入請求幀后,根據當前時隙情況為每個節點分配傳輸時隙,并發送接入確認幀。機載通信設備收到接入確認幀后,提取自己的時隙信息,完成入網過程。

圖10 蜂群測控動態組網協議示意Fig.10 Data link dynamic networking protocol flow chart
由以上入網過程可以看出,新節點入網的時間以時幀周期為單位,在收到絡時間基準節點周期性發送的接入輪詢幀后,若網絡容量為滿,則待入網節點最快為2個時幀周期即可入網,若新入網節點數過多發生碰撞或是隨機不發送入網請求,則最長不超過4 s。同步傳輸階段網絡每個用戶在自己的傳輸時隙中發送數據業務,實現無碰撞數據傳輸。
1.5 面向任務的蜂群測控資源智能調度原理樣機
面向任務的蜂群測控資源智能調度原理樣機包括3個席位,分別是蜂群無人機協同演示飛行任務規劃席位、指揮控制席位和編隊控制三維可視化仿真控制席位。這3個席位共同構建一套演示環境,演示蜂群無人機編隊從復雜環境建模、探測模式確認、編隊組建、目標分配、任務規劃、編隊飛行、編隊變換、編隊協同、遙感任務分發、協同遙感探測到安全返航的全過程。
面向任務的蜂群測控資源智能調度原理樣機系統接口如圖11所示。
(1)3個屏幕部署跨3屏的三維軟件
① 監視一個編隊的所有無人機的飛控和載荷狀態;
② 一個編隊無人機數量最大為12架;
③ 默認界面全編隊無人機監視頁面,可以在單機監控界面和全編隊監控界面間切換;
④ 飛行控制指令僅能對編隊領航無人機進行操縱,載荷控制指令可以對編隊內任意無人機進行操作;編隊無人機監視頁面包含常用的載荷操縱指令,領航無人機包括常用的飛行控制指令和載荷控制指令;
⑤ 飛控監視參數包括:位置、三姿和速度等;
⑥ 載荷設備包括光電攝像機和成像雷達,監視內容包括:攝像頭方位角、俯仰角、視場角、雷達工作狀態和視頻圖像等;
⑦ 支持3種工作模式:自主飛行、指令飛行和手動操縱。自主飛行:根據預設航線進行飛行,從指令飛行或手動操作模式切回自主飛行模式時,需要選擇距離最近的航點切入并繼續后續飛行;指令飛行:包括左飛、右飛、直飛、爬升、下降和平飛等指令;手動操縱:通過油門臺實現無人機速度的改變,通過飛行操縱桿實現航向角和俯仰角的控制;
⑧ 可以通過切換按鍵實現一個搖桿對無人機和載荷設備的交替控制;
⑨ 載荷設備的控制包括:攝像頭轉動、視場角放大、視場角縮小和開關機;
⑩ 飛行控制指令包括:起飛、返航等。
(2)立屏幕部署飛行任務規劃軟件
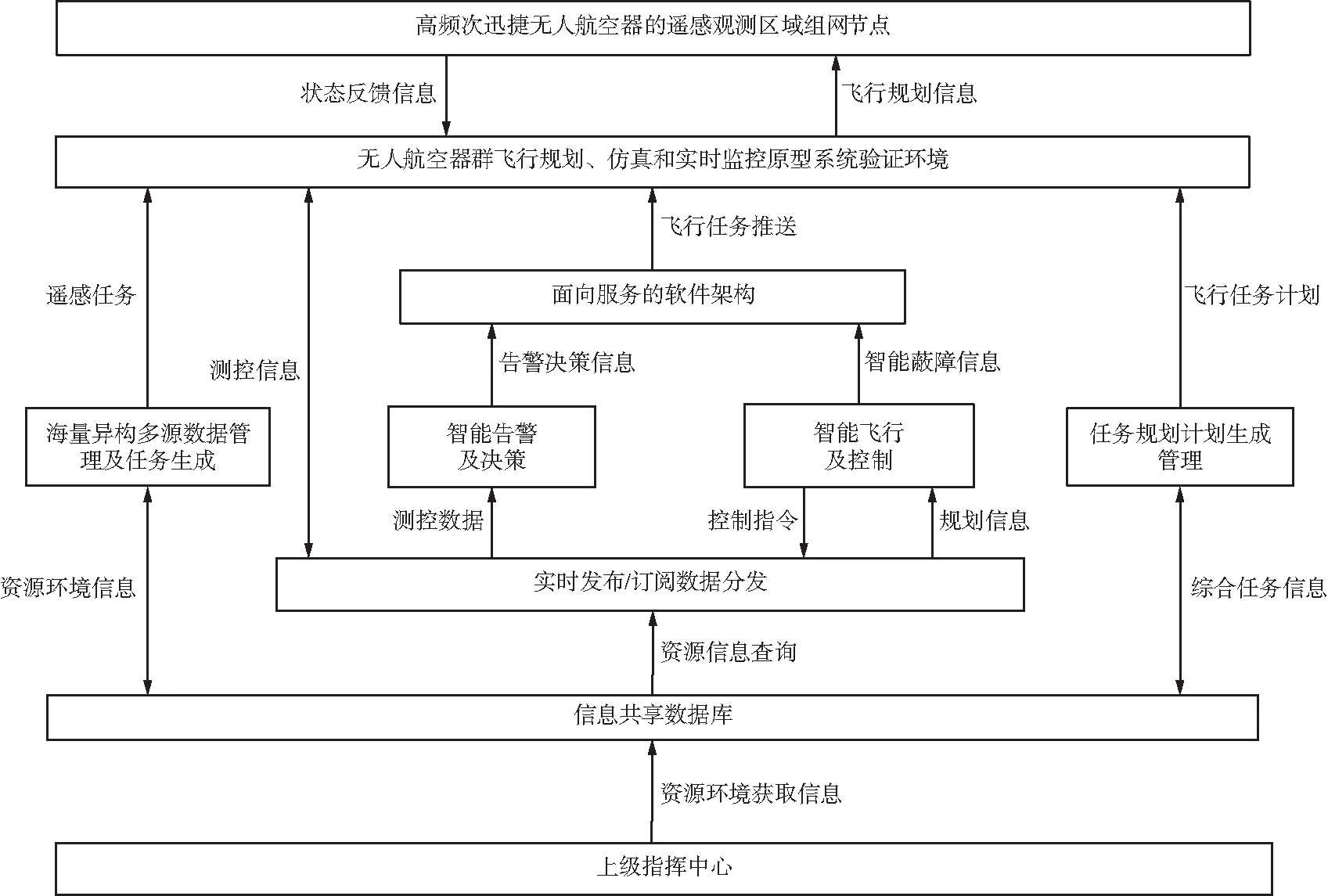
圖11 原理樣機系統接口Fig.11 Interface diagram of prototype system
① 設置遙感探測區、探測模式、編隊數量和各編隊無人機數量;
② 進行一鍵目標分配和任務規劃;
③ 針對任務規劃結果支持手動編輯修改;
④ 完成對各編隊領航無人機的航線裝訂;
⑤ 同步遙感探測區、無人機類型、任務規劃結果到任務顯示軟件;
⑥ 可以通過標牌形式顯示各無人機的簡略參數;
⑦ 可以清晰地顯示領航無人機與編隊無人機關系;
⑧ 地圖軟件的基本功能:距離量算、地圖放大縮小、地圖加載等基礎操作。
(3)獨立屏幕部署任務顯示軟件
① 根據任務規劃結果同步顯示遙感探測區、無人機類型、任務規劃結果;
② 僅顯示當前控制編隊的無人機信息和無人機類型,全部的遙感探測區;
③ 可以通過標牌形式顯示各無人機的簡略參數;
④ 可以清晰地顯示領航無人機與編隊無人機;
⑤ 地圖軟件的基本功能:距離量算、地圖放大縮小、地圖加載等基礎操作。
(4)獨立屏幕部署編隊控制軟件
① 可以實現當前控制編隊的選擇;
② 維護幾種常見的編隊形式,各種編隊形式之間可以實現任意隊形變換;
③ 可以實現各席位編隊控制權的切換、管理和同步。
飛行狀態監控軟件主界面如圖12所示,主要完成對無人機的飛行狀態和載荷狀態的監視并完成對無人機的控制。軟件主界面分為2部分,標題欄和無人機基本情況顯示區。
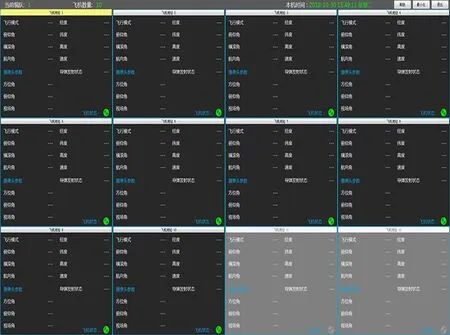
圖12 飛行狀態監控軟件界面Fig.12 Flight status monitoring software interface
地面控制站任務顯示軟件具備地圖軟件的基礎功能,并能夠基于二維地圖顯示任務規劃結果、當前主控編隊及其簡略參數、飛行軌跡,軟件界面如圖13所示,包括菜單欄、顯示區和狀態欄三部分。

圖13 任務顯示軟件界面示意Fig.13 Situation software interface diagram
飛行任務規劃與飛行狀態監視軟件如圖14所示。
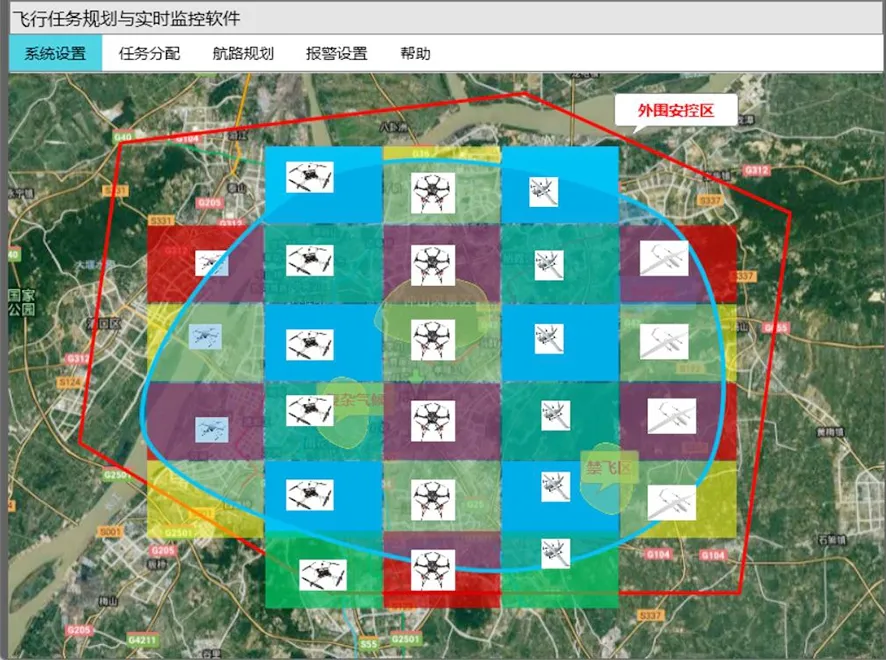
圖14 飛行任務規劃與飛行狀態監視軟件界面Fig.14 Interface of flight mission planning and flight status monitoring software
2 結束語
本文提出構成基于面向任務的蜂群測控資源智能管控系統的概念和架構,針對蜂群測控系統面向無中心化、自主化和自治化方向發展思路進行了原型系統的開發和相關技術研究,通過研究飛行任務規劃技術、飛行任務實時監控技術、遙感任務分發路由技術和任務自組網技術等,實現了面向任務的蜂群測控資源智能調度原理樣機。隨著蜂群網絡數據的增加,大容量多媒體數據的引入,實現測控資源的動態智能管控,解決海量節點組網中的資源分配問題,面向任務的蜂群測控資源智能管控技術還需要進一步深入研究。
猜你喜歡
今日農業(2021年9期)2021-11-26 07:41:24
發明與創新·小學生(2021年3期)2021-03-25 11:48:49
公民與法治(2020年11期)2020-07-25 02:02:06
領導決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
中國衛生(2016年2期)2016-11-12 13:22:16
華東科技(2016年10期)2016-11-11 06:17:41
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
中國工程咨詢(2016年4期)2016-02-14 07:28:28