基于改進指數趨近律的機械臂控制器設計
2020-11-10 11:21:26梁驊旗陸暢
中阿科技論壇(中英阿文) 2020年8期
關鍵詞:機械臂
梁驊旗 陸暢

摘要:針對機械臂控制系統廣泛應用的滑模控制策略,存在抖振幅度大、對外界干擾敏感等問題,提出改進指數趨近律的滑模控制器。該策略采用干擾觀測器對機械臂的建模誤差及外部擾動實時監測;基于飽和函數,提出了一種改進指數趨近律;在此基礎上設計滑模控制律,用Lyapunov方程驗證系統的可到達性。仿真結果表明,該控制器能快速跟蹤給定信號,減小系統抖振,有效地克服外界干擾,提高機械臂的控制性能。
關鍵詞:機械臂;干擾觀測器;改進趨近律
中圖分類號:TP241? ? ? ? ?文獻標識碼:A
機械臂具有靈活程度高、可靠性好、生產效率高的特性。因此,機械臂已在農業采摘、機械裝配、醫療健康等領域普遍應用。但是,由于機械臂是一類多輸入多輸出系統,存在非線性、強耦合性的特征,這些因素增加了精確控制的難度[1-2]。滑模控制策略因具有穩定性好、響應速度快、適應性強等優點,在機械臂系統中得到普遍應用[3]。文[4]用離散函數來改進趨近律,有效弱化抖振對系統影響,但到達滑模面的時間變長;文[5]采用雙冪次函數改進冪次趨近律,提高了機械臂的跟蹤速度,弱化了抖振的影響,但跟蹤效果有待改進。張俊輝[6]等提出對采用飽和函數替代符號函數改進指數趨近律,跟蹤效果良好,抖振削弱明顯,但存在跟蹤速度較慢的問題。
本文綜合考慮上述問題,針對機械臂控制存在抖振、跟蹤速度慢和對外部干擾敏感等問題,提出了一種基于改進指數趨近律的滑模控制器。利用改進趨近律減小滑模抖振,提高跟蹤速度;同時,干擾觀測器對不確定因素進行監測,在Matlab仿真平臺驗證了該控制器的可行性與有效性。
1 機械臂數學建模
將一個剛性二關節的機械臂作為研究對象,可建立基于拉格朗日運動學的機械臂數學模型如式(1)所示。
由于系統存在外部干擾信號,在設計過程中引入干擾觀測器來處理外部干擾,使其能有效地跟蹤給定位置qd,假設以下條件成立:
假設1? 給定位置qd及其n階導數是存在且有邊界的。
2 趨近律設計
式(2)中的函數,在初始狀態可以以較快的速率靠近滑模面,但是在向原點靠近的過程中,速率會變慢,不能保證在有限的時間內到達原點,造成系統的抖振現象,減小跟蹤精度,對系統造成損傷。因此本文對該趨近律進行了改進,使其同時兼顧控制精度與抖振的削弱。
改進后的指數趨近律為:
在式(3)中,引入s2可以加快趨近律靠近原點的速度,使正常運動段的時間縮短;用改進的sat(s)取代sgn(s),其中,θ為抖振指數,ω為精度指數,調整θ的大小可以有效弱化抖振對系統的影響,但會使系統準確度下降。因此通過調整ω大小,可以保證抑制抖振的同時,提高系統的精度。
下面對系統穩定性進行分析:
3 滑模控制器設計
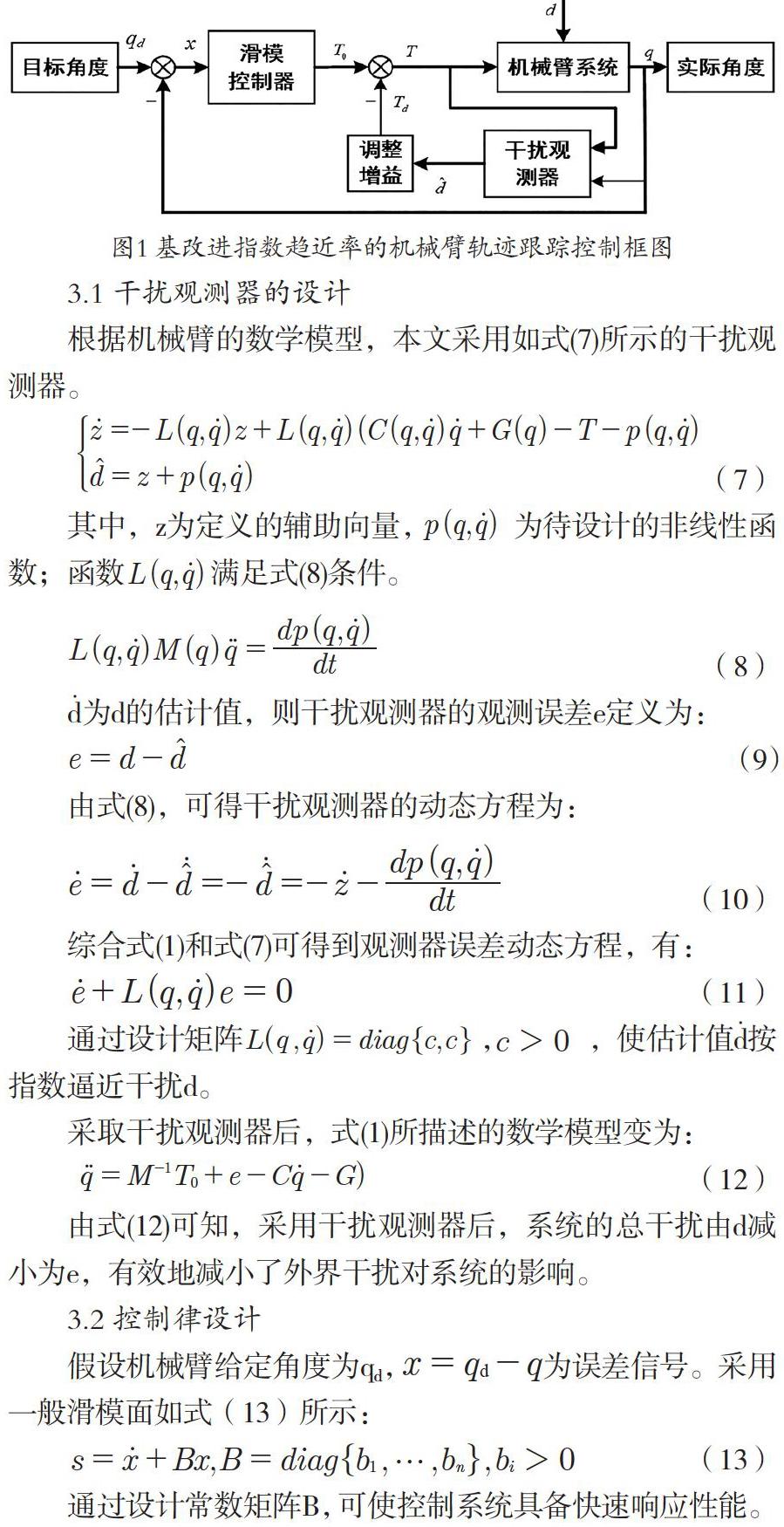
控制器的系統框圖如圖1所示,系統主要由滑模控制器、機械臂系統、干擾觀測器等部分組成,。在控制系統正常工作時,向控制器輸入一個期望角度qd,期望角度qd與實際輸出角度q作差會產生誤差信號x,用基于改進指數趨近律的滑模控制器來處理誤差信號x,經過滑模控制器處理會產生控制力矩T0,與干擾觀測器處理后的輸出力矩Td作差,即可得到系統的控制力矩T,將T輸入機械臂中,實現對整個系統的控制。
對于機械臂系統工作時存在外部干擾d,可以將其分為兩部分進行處理:對于可觀測部分(內部摩擦),可以采用干擾觀測器進行實時監測;對于不可觀測部分(隨機外部干擾)。則采用改進指數趨近律來進行補償。
3.1 干擾觀測器的設計
根據機械臂的數學模型,本文采用如式(7)所示的干擾觀測器。
本文的仿真研究方案為:為說明改進指數趨近律的滑模控制器較一般指數趨近律有較好的軌跡跟蹤能力和抗抖振能力,就軌跡跟蹤、位置跟蹤誤差兩方面進行比較分析。
比較圖2a和圖2b可分析,采用一般指數趨近律的滑模控制器,關節1、關節2在初始狀態的的曲線波動較大,在3s之后才能較好地跟蹤給定曲線且曲線抖振較為明顯,控制效果較差;采用改進指數趨近律的滑模控制器,雙關節的在0.5s左右就能較好地跟蹤給定軌跡且曲線抖動不明顯,有較好的控制效果,說明改進指數趨近律能夠增加系統的軌跡跟蹤速度,減小系統抖振。
由圖3a、圖3b的誤差曲線可以分析,采用一般指數趨近律的系統雙關節誤差波動很大,系統不能穩定跟蹤給定軌跡,采用改進指數趨近律的系統在1s以后跟蹤誤差幾乎為0,跟蹤速度快且抖振小。
5 結論
針對多關節機械臂滑模控制存在抖振大、跟蹤速度慢、受外界干擾影響大的問題,本文設計了改進指數趨近律的滑模控制策略。在設計控制器的過程中,干擾觀測器對外界可觀測的干擾進行觀測,改進指數趨近律可以有效提高系統軌跡跟蹤速度,減小系統跟蹤誤差,保證系統的安全性和穩定性。仿真分析表明,改進后的控制器能快速跟蹤給定信號,減小系統抖振,有效地克服外界干擾,提高機械臂的控制性能。
(責任編輯:侯辛鋒)
參考文獻:
[1]張俊輝,劉斌,蔣崢,等.基于改進趨近律的滑模控制在機械臂中的應用[J].高技術通訊,2018,028(006):534-546.
[2]梁驊旗,米根鎖.基于干擾觀測器的機械臂改進趨近律的滑模控制[J].測控技術,2019,038(001):140-144.
[3] Kumar J, Kumar V, Rana K P S. Efficient reaching law for SMC with PID surface applied to a manipulator[C].//Ghaziabad. In: Proceedings of the IEEE Computational Intelligence on Power,, Energy and Controls with Their Impact on H-manity. Ghaziabad,India, 2017.:51-56.
[4]高為炳.變結構控制的理論及設計方法[M].北京:科學出版社,1995.
[5]梅紅,王勇.快速收斂的機器人滑模變結構控制[J].信息與控制,2009,38(5):552-557.
[6]張俊輝,劉斌,蔣崢,等.基于改進趨近律的滑模控制在機械臂中的應用[J].高技術通訊,2018,028(006):534-546.
猜你喜歡
科技與創新(2016年23期)2017-03-30 04:12:23
中國科技縱橫(2017年3期)2017-03-29 18:50:48
山東工業技術(2017年4期)2017-03-28 07:56:48
求知導刊(2017年1期)2017-03-24 22:25:58
物聯網技術(2017年2期)2017-03-15 17:04:47
中國科技博覽(2016年27期)2017-01-23 01:32:28
農機使用與維修(2016年12期)2017-01-17 15:23:12
安徽理工大學學報·自然科學版(2016年1期)2016-12-14 22:15:06
計算機教育(2016年7期)2016-11-10 09:01:27
中國科技博覽(2016年9期)2016-04-25 10:13:28
