丘陵山區果園機械化技術與裝備研究進展
2020-11-25 03:53:00鄭永軍江世界陳炳太呂昊暾
農業機械學報 2020年11期
關鍵詞:作業
鄭永軍 江世界 陳炳太 呂昊暾 萬 暢,2 康 峰
(1.中國農業大學工學院, 北京 100083; 2.塔里木大學機械電氣化工程學院, 阿拉爾 843300;3.北京林業大學工學院, 北京 100083)
0 引言
我國是水果生產世界第一大國,2018年種植面積達1.19×107hm2[1-2],其中優質果園主要分布在川中、江南、兩廣、山東及陜甘等以丘陵山地為主的地區。受立地條件和種植模式的影響,林果(含桑茶)生產機械化水平總體小于20%。
2017年農業農村部提出,要在“十三五”期間農業綜合機械化率達到70%,丘陵山區農業機械化實現跨越式發展[2]。隨著工業化、城鎮化的加速發展,人口老齡化現象日趨嚴重,人工勞動成本逐年增加。同時,新時期果農觀念的快速轉變和對新技術的渴求,為果園提供了種植管理模式改革的契機和產業升級驅動力,加速了林果產業結構調整與轉型升級,規范化、標準化、現代化成為果園的發展方向,也為果園機械化提供了發展機遇。
歐美等發達國家基于標準化果園的生產機械裝備技術已較成熟,產品線齊全;意大利、日本則在丘陵林果機械上有一定優勢和應用基礎。我國在此領域尚處于標準化建園、發展現代機械化生產的起步階段,單一功能機械品種多,而在丘陵山區基本沒有成熟的果園機械技術與適用性裝備。由于生產綜合成本增加,水果種植效益降低,因此亟需丘陵山區果園適用的機械動力底盤、多功能作業平臺、修剪機械、植保機械和采摘收獲等技術與裝備,以解決勞動強度大、生產效率低、勞動力緊缺且“無機可用”的問題。
本文首先分析我國丘陵山區果園的分布情況以及種植特點,闡述果園生產關鍵技術和裝備的研究進展,指出丘陵果園機械化發展面臨的問題,并提出發展建議。
1 我國丘陵果園分布概況
1.1 果園分布
根據國家統計局資料,2018年我國果園種植面積達1.19×107hm2,水果產量2.57×108t[1],圖1為我國主要水果的種植面積和產量占比,圖2為其主要種植省份。其中:蘋果主要產區是陜西省和山東省,兩省蘋果種植面積和產量約占全國蘋果總種植面積和產量的44.14%和49.98%;廣西壯族自治區、廣東省、云南省是我國香蕉的主要產區,三省區香蕉種植面積和產量約占全國香蕉總種植面積和產量的83.50%和84.61%。
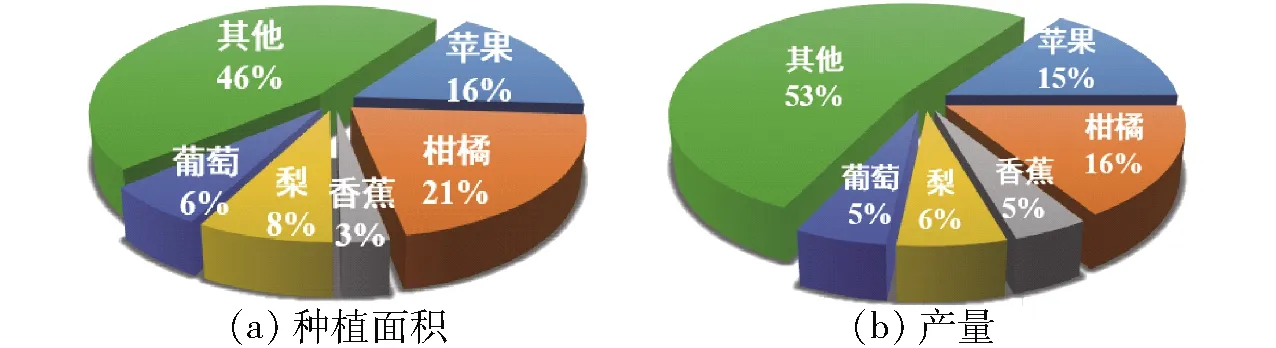
圖1 我國主要水果種植面積與產量占比Fig.1 Planting area and yield of main fruits in China

圖2 水果主要種植省份產量與面積Fig.2 Main fruit growing provinces
果園按照地形主要分為平原地區果園和丘陵山地果園,從我國丘陵主要分布情況(圖3)和主要果樹種植省份的丘陵山地面積占全省面積的比例(表1)[3]可知:陜西省、廣西壯族自治區、廣東省、山東省等種植面積占我國果園總面積的90%以上,即60%以上的果園分布在以丘陵山地為主的省份,是國內主要種植水果的大產區。可以說,林果業是當地農民增收、農村經濟發展的重要產業,甚至是一些地區支柱產業,但受地理位置和地區經濟發展水平影響,果園生產效率與機械化水平極低。

圖3 我國丘陵主要分布示意圖Fig.3 Schematic map of distribution of main hills in China
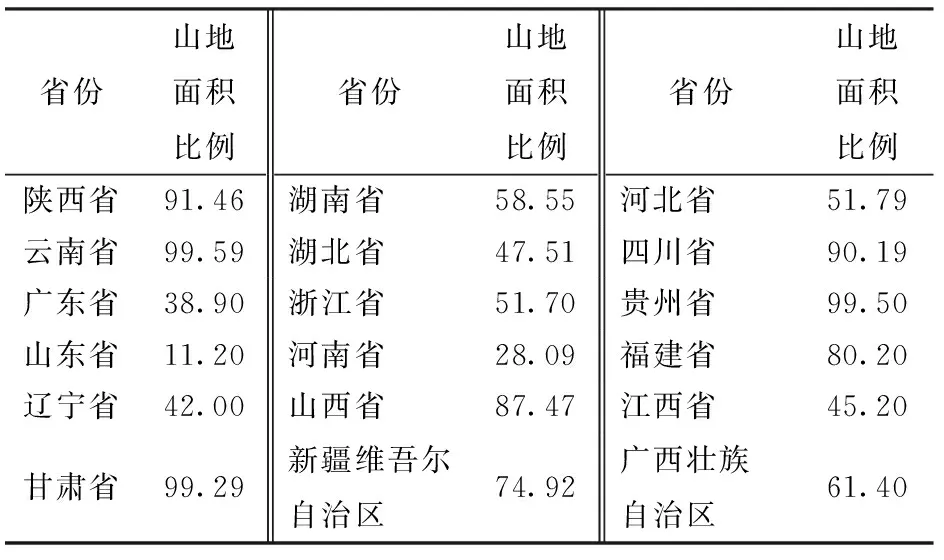
表1 我國主要果園種植省份丘陵山地面積占全省面積比例Tab.1 Proportion of mountainous areas in main orchard planting provinces in China %
1.2 丘陵果園種植特點
丘陵山地地形地貌變化大且可利用地塊分散,緩坡規模種植、依山就勢的小塊階梯種植是主要果園種植形式。在前期調研基礎上,整理了部分丘陵果園的種植參數(表2),其中各果園統計樣本數為50,表中株距、行距、株高為統計平均值。在調研的果園中,廣西崇安芒果園為陡坡種植,坡度較大(圖4a);北京平谷蘋果園為傳統種植果園,樹冠大小不一,易形成郁閉(圖4b);廣西隆安柑橘園山間緩坡種植(圖4c);江蘇鎮江油桃園種植在山邊低洼處,高起壟式種植模式,行間開設排水溝(圖4d)。
近年來,在便于進行土地整理和基礎設施建設的緩丘陵地區,宜機化、規模化、標準化成為新建果園的主要趨勢,使種植環境和機械化作業基礎得到改善。例如:溧水地區果園采用寬行密植栽培模式,較適宜機械化作業(圖4e),紡錘型(圖4f)等新型栽培模式也得到發展。

表2 部分丘陵果園種植參數Tab.2 Planting parameters of some hilly orchards

圖4 果園類型Fig.4 Orchard types
1.3 丘陵果園機械化發展水平
目前丘陵果園生產過程以人工為主,樹體管理、病蟲害防治、采摘收獲與運輸是勞動量最大的環節,約占生產總勞動量的70%。以機械化程度較高的蘋果園為例,其樹體管理機械作業水平約8%,植保機械作業水平約7.5%,收獲機械作業水平約2%,綜合機械化水平僅5.75%[4]。
造成丘陵地區果園機械化程度低的主要原因有:①我國果園總體面積大,丘陵山區主要是分散栽培、分戶管理的傳統種植管理模式;由于單戶種植規模小,集中管理困難,引進機械裝備經濟成本較高,收益較慢。②丘陵山地地貌嚴重限制了作業機械行走和轉場;特別是大于25°的陡丘陵山地,不適于作為農業生產資源,更不適宜機械化作業,但依然存在大量的傳統果園且無機械可用。③較成熟的果園機械裝備對丘陵山區種植模式、作業環境、立地條件等適應性差。④丘陵山區果園種植農藝較落后,大樹冠、低分叉、平拉枝、行間郁閉的傳統喬砧果園,仍是主要種植模式,不利于機械的進入。⑤果園機械推廣服務體系不完善,技術培訓不到位,果農對機械裝備認知不足。
2 丘陵果園機械裝備和技術研究進展
2.1 機械動力底盤
動力底盤是果園機械的基礎,目前果園底盤的主要形式有輪式底盤和履帶式底盤,輪式底盤行駛速度快,通過性、爬坡、越障及地面適應能力比履帶式底盤差。履帶底盤能夠緩和地面的凹凸不平,地面支撐面積大、接地比壓小,具有良好的穩定性能和越障能力,適合在崎嶇的地面上行駛[5]。
從20世紀60年代開始,國外果園機械快速發展,配套動力底盤呈現多樣化,美國、加拿大等國家以地勢平坦區大規模果園種植為主,果園機械以大型綜合性機具為主,動力底盤多為輪式;意大利、日本等國家果園種植環境與我國類似,果園機械以輕型化和小型化為主,動力底盤多為小型履帶式。圖5a為意大利BCS公司的VOLCAN L80AR型果園專用拖拉機,前后輪大小、輪距一致,雙向行駛;圖5b為DEUTZ-FAHR公司的5KF型山地履帶式拖拉機,圖5c為意大利ANTONIO CARRARO公司的ERGIT R前輪后履帶式折腰拖拉機;圖5d為日本久保田公司的K-BP43型小型履帶式運輸車,整機尺寸(長×寬×高)為1 420 mm×620 mm×990 mm,最大承載300 kg。

圖5 國外機械動力底盤類型Fig.5 Types of mechanical power chassis abroad
為提高果園動力底盤的性能以及對不同果園的適應性,國內研究者針對我國果園種植特點進行了一系列研發或改進。
在輪式底盤方面,河北農業大學設計的TG-20型果園動力底盤[6]能夠與旋耕機、升降平臺、噴霧機等模塊配合使用,外形尺寸(長×寬×高)為2 484 mm×1 100 mm×1 150 mm;丁素明等[7]針對低矮密植果園作業空間小、機具通過性差的特點,設計了低矮型自走式果園噴霧機動力底盤(圖6),可根據路面狀況進行兩驅與四驅自由切換,最低通過高度為1 600 mm,最小轉彎半徑2 000 mm,最大越障高度為87 mm;郝朝會等[8]設計了果園多功能動力底盤(圖7),最大爬坡角為24°,最大越埂高度為235 mm,可掛載貨框、升降機、風送噴霧機等。現有針對輪式底盤的研究一般是面向行間通行較好的果園,而丘陵山區需要具有良好爬坡越障能力、轉場能力以及人機作業安全保障能力。

圖6 低矮型自走式果園噴霧機動力底盤Fig.6 Low self-propelled orchard sprayer power chassis

圖7 多功能動力底盤Fig.7 Multifunctional power chassis
在仿形動力底盤方面,王亞等[9]研制了一種適用于丘陵山區特殊地貌作業的全時8輪驅動地面仿形動力底盤(圖8a),采用5 自由度地面仿形原理,保證車輪的地面附著力,具有良好的地面通過性以及行駛平順性。劉平義等[10]開發了一種丘陵山區仿形行走動態調平底盤(圖8b),能在崎嶇地面上實現全時多輪驅動、多自由度仿形行走,且可通過懸架懸臂夾角調節實現車體調平控制,動態調平精度在0.5°范圍內。上述研究只完成了比例模型樣機和多作業場景模擬,并無實際作業動力底盤的驗證。

圖8 地面仿形動力底盤Fig.8 Ground profiling power chassis
在履帶式動力底盤方面,王鋒等[11]針對南方丘陵地區設計了一種三角履帶式果園動力底盤,最大爬坡角為15°,能夠跨越528 mm的垂直障礙物;趙林亭等[12]設計自走式電動履帶底盤,整機結構和電路都采用模塊化設計,能夠便捷換接不同模塊,并有遙控與安全防護,保證作業安全。與圖6和圖7所示輪式底盤相比,三角履帶式果園動力底盤和自走式電動履帶底盤的整體尺寸縮小一半以上,對丘陵山區果園的適應性得到提高,但仍處于實驗室開發測試階段,無實際搭載機具的作業能力和安全性指標。
表3為部分果園動力底盤的性能參數。表中“/”表示文獻中未給出相關參數。

表3 果園動力底盤部分參數對比Tab.3 Comparison of some parameters of orchard power chassis
此外,研究者針對農用底盤的動力特性以及控制方法開展了一系列研究[15-17],旨在提高動力底盤在不同作業環境下的適應性和可操控性。隨著自動駕駛技術的發展,動力底盤的自主導航技術得到快速發展[18-24],為未來果園無人化作業提供了技術支持和理論基礎。
2.2 作業平臺
果園管理過程中,剪枝、套袋、采果等高位作業環節所占比重大,人工攀爬、搭建扶梯或者搭建簡易平臺等傳統作業方式需要頻繁上下和人工挪移,勞動效率低,安全風險大,果園作業平臺的發展直接影響果園產業的發展。
2.2.1國外研究
國外作業平臺在果園中的應用可以追溯到20世紀60年代的美國,隨著科技的發展,近年來果園作業平臺得到快速發展,種類和功能更加多樣。SAZO等[25]分析美國紐約州果園作業平臺的應用情況以及帶來的效益,認為作業平臺能夠有效提升作業效率并減小作業風險,常見作業平臺種類如圖9所示,主要分為單工位作業平臺、自走式作業平臺、吊籃式作業平臺、多工位作業平臺及其他作業平臺。

圖9 美國常見作業平臺種類Fig.9 Common operating platforms in United States
與美國農場規模化的果園種植方式不同,日本果園受其國內地形限制,主要分布在丘陵山區,日本的作業平臺種類以小型化為主要特點,一般具有調平和安全防護功能,例如野澤正雄[26]針對果園空中作業量大,傳統作業方式效率低、危險性大等不足,設計了果園自走式作業平臺,可在普通果園和喬化果園使用,工作臺可調平,滿足0°~15°坡度下作業需求(圖10);YAMADA等[27]設計了小型高機動性果園升降平臺,采用四輪獨立驅動,水平控制裝置能夠根據地面坡度調節座椅方向,使座椅保持水平狀態,提高作業安全性。

圖10 果園自走式作業平臺Fig.10 Self-propelled orchard operation platform
2.2.2國內研究
20世紀90年代,果園輔助升降作業平臺開始進入中國,并得到快速發展,研究者針對中國果園種植與分布特點開展了一系列研究。對近10年來研究者發表的科技論文和相關專利數量加以統計,以果園升降平臺、果園作業平臺以及果園管理平臺為檢索主題,通過Web of Science和中國知網(CNKI)兩個檢索平臺進行檢索,并剔除無關以及重復的論文和專利,得到中國研究者發表的科技論文和專利數量(圖11),其中2020年只統計第一季度。
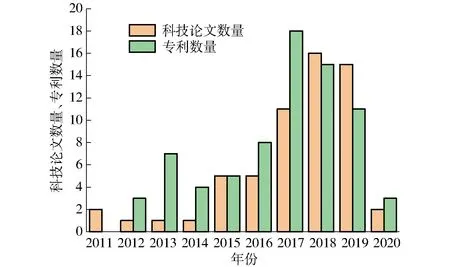
圖11 近10年中國學者發表的關于果園作業平臺的科技論文和專利統計結果Fig.11 Scientific and technological papers and patent statistics on orchard operating platform published by Chinese scholars in past 10 years
(1)作業平臺類型及關鍵技術
表4為近年來中國研制的果園作業平臺典型成果及其關鍵技術,2007年研制出第1臺多功能作業機牧神LG_1[28](圖12),隨后針對中國果園種植與分布情況,研究者開展一系列探索,研究主要集中在多功能、小型化、單人操控等方面(圖13)。
(2)關鍵技術研究現狀
丘陵果園地面起伏較大,安全性是果園作業平臺實際應用的必要條件。目前針對果園作業平臺安全防護的研究主要集中在調平和防翻兩方面。
在果園作業平臺調平研究方面,王小龍[38]在劉大為等設計的柑橘園小型升降作業平臺的基礎上,設計了一種“方向+角度”的調平裝置,對工作臺的方向和角度進行調節,能夠適應0°~15°傾斜坡度的調平,但是調平需要對方向和角度兩次調節,且是否調平需要人為判斷。王永振等[39]、樊桂菊等[40]設計了針對折臂式懸掛升降作業平臺的自動調平控制系統,通過安裝在工作臺底部的傾角傳感器實時檢測傾斜角,調節工作臺與橫梁的相對角度,實現對工作臺的調平。姜新宇等[41]針對折臂式果園升降平臺設計了基于單片機的自動調平控制系統。楊徑等[42]、趙鵬等[43]、劉學峰等[44]對剪叉式果園作業平臺進行了調平機構設計與仿真。
目前針對果園作業平臺防翻的研究主要集中在側翻預警和動態自動防翻方面,王鵬飛等[45]設計了基于橫向載荷轉移率(LTR)的靜態防側翻系統,通過貼片式壓力傳感器檢測底盤與升降臺之間的壓力并計算LTR,通過改變平臺高度防止平臺側翻;王永振等[46-47]設計了果園管理機智能安全預警系統和傾翻預警控制系統,但是只考慮了側傾,未考慮作業平臺在丘陵果園作業時存在前后傾倒;張昊等[48]設計了傾翻失穩預警系統,采用穩定系數K值作為傾翻預警的判定指標;DUAN等[49]對三自由度升降平臺的傾斜穩定性進行分析,分別研究了縱向傾斜、橫向傾斜和斜向傾斜的穩定性,仿真與試驗結果表明停車位置、升降高度、載荷等因素對穩定性有顯著影響;江世界[36]針對單人臺上操控作業時誤操作帶來的安全隱患,進行了誤操作安全防護設計,同時設計了基于多點力反饋的動態多工況自動防翻系統,并進行相關試驗,試驗結果表明誤操作安全防護有效,自動防翻系統能夠實時響應。

表4 果園作業平臺典型成果及其關鍵技術Tab.4 Typical achievements and key technologies of orchard operation platform

圖12 牧神LG_1型多功能果園管理機Fig.12 LG_1 multifunctional orchard manager

圖13 我國果園作業平臺類型Fig.13 Types of orchard operating platform in China
此外,對作業平臺的人機工程學設計也能提高作業安全性和舒適性[36,50]。
2.3 果樹修剪機械
果樹修剪可以調整樹冠各部分的疏密度、枝葉的分布方向和葉面積系數,可以保證果樹葉進行良好的光合作用,提高果樹的代謝能力,改善果樹的營養分布。特別是丘陵果園光照均勻性不足,果樹的合理修剪對提高果園生產具有重要的意義。
果樹修剪方式主要分為人工修剪、機械修剪、智能修剪等,果樹修剪根據修剪程度不同可以分為精剪和粗剪,精剪是指利用修枝剪或者智能修剪裝備進行單枝修剪,粗剪是指利用機械設備進行整株幾何修剪[51-54]。表5為果樹主要修剪方式及其技術特點。
2.3.1國外研究
目前國外手動、油動、電動以及氣動修枝剪等人工修剪裝備發展較為成熟,功能類型多樣,通用性好,如美國ZENPORT公司生產的LEP848型電動高枝修枝剪(圖14a)、意大利KUKER公司生產的氣動修枝剪(圖14b)以及日本ARS公司生產的氣動高枝修枝剪(圖14c)。

表5 果樹主要修剪方式及其特點Tab.5 Main pruning methods and characteristics
機械幾何修剪裝備以懸掛式為主,一般由拖拉機配套修剪機構組成,如B.M.V公司的飛鏢刀式剪枝機(圖15a),德國愛德華公司的往復式果樹剪枝機(圖15b)等。

圖14 國外人工修枝剪Fig.14 Foreign manual pruning shears

圖15 國外機械修剪裝備Fig.15 Foreign mechanical trimming equipment
智能修剪技術是近年來新興技術,KARKEE等[55]開發了一套用于高紡錘形蘋果樹自動修剪的樹枝識別機器視覺系統(圖16)。通過對果樹圖像處理,確定剪枝點,并設計剪枝原則,能夠實現85%的長枝條識別率和70%的枝條去除率。但是僅依靠樹枝長度或者樹枝的間隙來確定的修剪規則不完善,枝條的成活情況與枝條果實的生產情況也是剪枝必須考慮的問題;AMATYA等[56]針對全葉期櫻桃樹枝條的檢測展開研究,像素分類識別成功率89.6%,分枝檢測成功率89.2%,但是試驗是在晚上人為制造光源的情況下進行的,白天正常光照下的效果未知;BOTTERILL等[57]設計了一種葡萄剪枝機器人系統(圖17),利用計算機視覺系統來重建完整的葡萄藤模型,作業時移動平臺橫跨葡萄藤,通過LED補光燈組人為設置光照和背景,能夠有效提高剪枝點的識別成功率。

圖16 紡錘蘋果樹樹枝識別視覺系統Fig.16 Visual system for branch recognition of spindle apple tree
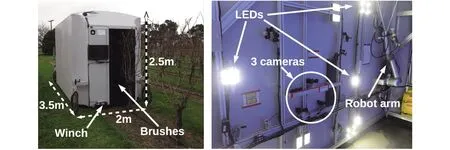
圖17 葡萄剪枝機器人系統Fig.17 Grape pruning robot system
2.3.2國內研究
(1)人工修剪
受限于我國丘陵山地果園種植模式,果樹修剪方式仍以人工修剪為主。高枝修剪主要是通過搭建扶梯和人工攀爬方式完成,該方式危險性高,且容易造成樹干或主枝斷裂,影響果樹產量,部分果園開始引進作業平臺來輔助高枝的修剪。
為提高高枝修剪生產安全性,鄒運梅等[58]設計了背負式高枝剪切機,采用動力與機具分離的方式;XU等[59]設計了一種多自由度可伸縮剪枝機,設計了伸縮式支腿和多自由度旋轉鋸片刀頭;王征等[60]設計了鋸切式蘋果剪枝機,束鈺等[61]在王征等研究基礎上設計了帶夾持機構的鋸切式蘋果剪枝機。這些裝備能夠有效提高人員安全性,擴大作業空間,降低勞動強度。
(2)機械修剪
機械化修剪裝備多用于葡萄園和矮化密植果園的整株幾何修剪,目前中國學者關于機械修剪的研究主要集中在葡萄樹的修剪,表6為葡萄修剪機典型成果及其技術特點。
(3)智能修剪
隨著智能化技術的發展,待剪枝條自動識別、定位并自主完成剪除的智能化修剪技術能夠有效彌補人工修剪以及機械修剪的不足,成為當前研究熱點,結合人工智能及相關領域技術的智能化修剪技術是果樹修剪的發展趨勢。
賈挺猛[69]對葡萄樹冬剪機器人的剪枝點定位方法進行了研究,并設計了葡萄樹冬剪機器人系統,通過CCD單目攝像機獲取葡萄樹圖像并進行處理,根據芽點信息設計了剪枝點定位算法。黃彪等[70-72]設計了枇杷剪枝機器人系統,采用超廣角攝像機采集枝條圖像,根據枇杷枝條特征提出了一種枇杷切削枝條確定及定位方法,實現了剪枝點的定位、枝條修剪及粉碎,單根枝條作業時間為55 s。LIU等[73-74]提出基于SR4000型深度傳感器的果樹三維骨架模型提取算法,并開展了基于BP網絡的果樹修剪方法研究。
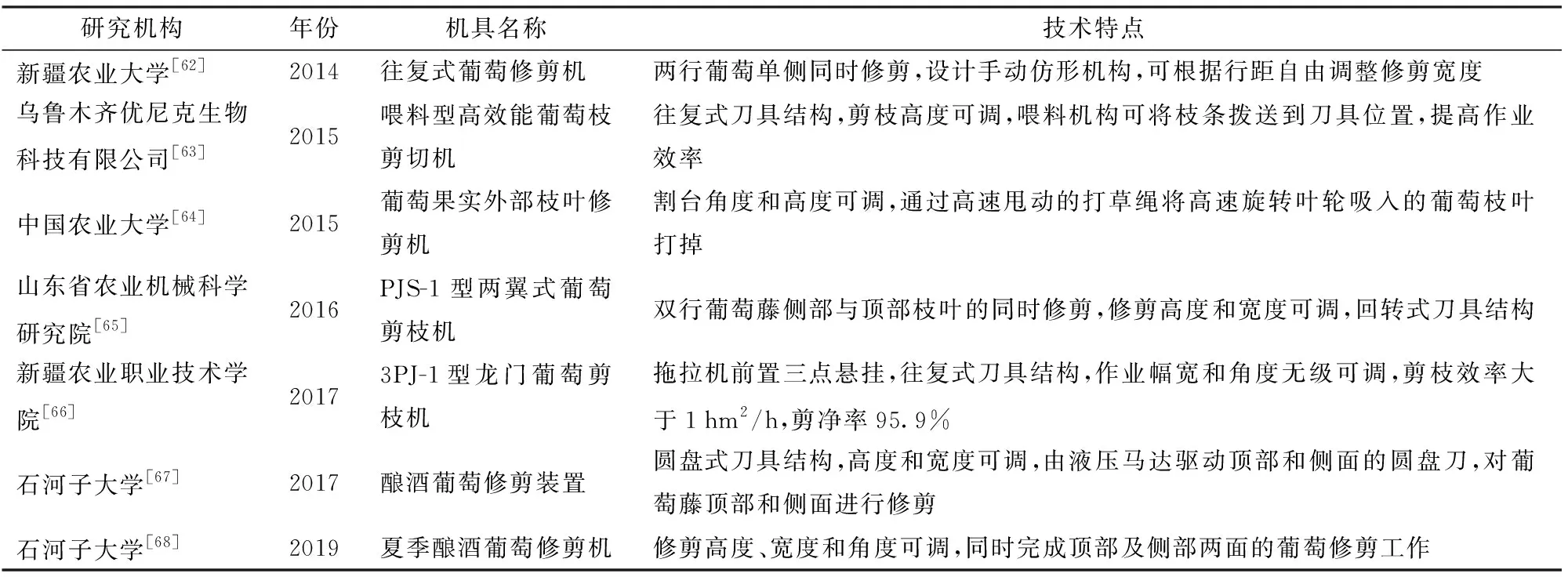
表6 葡萄修剪機典型成果及其技術特點Tab.6 Typical achievements and technical characteristics of grape pruning machine
實際果園作業中,樹葉遮擋、光照、嘈雜背景等因素都會影響剪枝點的獲取,現有研究中多采用人為設計圖像采集背景的方式來排除干擾因素(圖17),能夠有效提高剪枝點的識別成功率,但該種方式僅適用于葡萄樹或株型較小的果樹,對樹冠較大的果樹適用性較差。
在虛擬交互式輔助剪枝研究方面,呂萌萌等[75]和葉少挺等[76]基于Unity3D虛擬現實技術設計了果樹修剪系統,將果樹三維模型導入到Unity3D中,可真實模擬果樹的修剪過程。王丹等[77]基于Kinect進行虛擬果樹交互式修剪研究,建立了手勢交互式模擬剪枝方法,提升了交互的舒適性,能夠更真實的模擬果樹修剪。
此外,陸葉等[78]和張楨等[79]通過Matlab和ADAMS等軟件進行剪枝機器人的工作空間和運動學分析,為樣機的開發提供理論基礎。楊麗麗等[80-81]進行蘋果樹剪枝仿真研究,能夠為實際生產提供方案指導。
2.4 果園植保機械
2.4.1概述
病蟲害防治工作是整個果樹管理作業中重要的環節,隨著季節變更、氣候變化,每年噴藥8~15次,其工作量約占整個果樹管理工作量的30%。
果園植保裝備經歷了從手動到機動、從粗放到精準、從地面到航空的變革,植保方法主要分為地面植保技術和航空植保技術,地面植保技術可分為人工施藥技術、傳統風送施藥技術和精準施藥技術等,精準施藥技術主要包括靜電、對靶、仿形、變量等關鍵技術。表7為果園主要植保方法及其技術特點。
2.4.2國外果園植保裝備
農機與農藝相結合的果園種植模式,使歐美、日本、意大利等國家果園病蟲害防治更易于實現機械化。風送噴霧技術、靜電噴霧技術、循環噴霧技術、對靶噴霧技術、航空噴霧技術等得到快速發展并應用。植保機械種類多樣,產品應用成熟,生產企業眾多,如荷蘭的MUNCKHOF公司、美國的ESS公司和SPRAYING SYSTEM公司、意大利的CAFFINI公司、英國的LURMARK公司、丹麥的HARDI公司,圖19所示為部分國外果園植保裝備。總體來說歐美國家的果園噴霧機械以牽引式大中型裝備為主,偏向于專機專用,自動化程度相對較高,意大利、日本的果園噴霧機械以自走式中小型裝備為主。
2.4.3國內研究現狀
隨著智能化技術的發展以及農藥減量、提高農藥利用率的需求,精準施藥技術成為果園植保技術發展的主要方向,也是目前果園植保研究的熱點。實現按需精準施藥、變量施藥的高效、精準、智能的施藥技術和裝備是提高農藥藥效與利用率的保證,也是降低農民勞動強度的重要措施。
通過Web of Science和中國知網(CNKI)兩個檢索平臺對近10年關于果園精準施藥和無人機施藥的科技論文進行檢索,并剔除無關以及重復的論文,得到中國研究者發表的科技論文數量如圖20所示,其中2020只統計第1季度。
精確獲取果樹冠層結構是實現精準施藥的先決條件,在基于激光雷達獲取冠層結構方面,LI等[82]設計基于激光傳感器的果園變量噴霧機,利用高精度激光傳感器獲取果樹冠層體積,并實時控制噴嘴的流量和噴嘴位置的風扇轉速,能夠有效節省藥量,減少地面和空氣中霧滴漂移量。薛秀云等[83]針對果園變量噴霧中果樹特征參數檢測效率低和對環境要求高的缺陷,研究一種基于葉墻面積LWA的果樹施藥模型,通過LiDAR獲取葉墻面積LWA,用以表征樹冠特征參數(圖21),試驗結果表明果樹藥液附著率接近100%,與連續噴霧和對靶定量噴霧相比,省藥率為68.34%和32.77%。但是,研究只針對仿真樹開展,對實際果樹的適應性未開展研究。此外,姜紅花等[84-85]設計了履帶自走式果園自動對靶風送噴霧機,并提出果樹冠層體積在線計算方法;LI等[86]開發了基于超聲傳感器的樹冠密度檢測系統;SHEN等[87]、CAI等[88]、LIU等[89]開展基于激光傳感器的果樹冠層結構識別的相關研究。
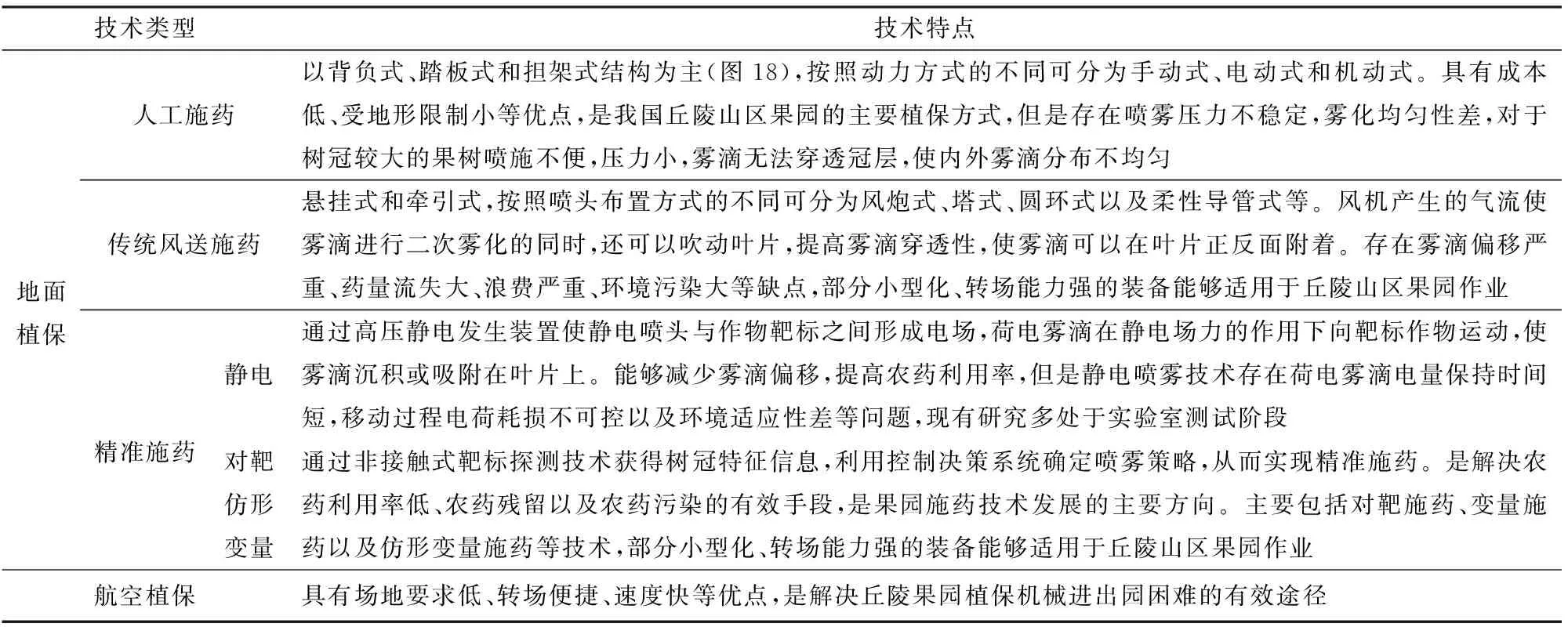
表7 果園主要植保方法Tab.7 Main methods of plant protection in orchard

圖18 人工施藥機具Fig.18 Artificial plant protection equipment
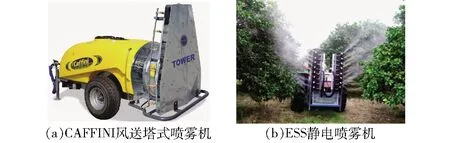
圖19 國外果園植保裝備Fig.19 Foreign orchard plant protection equipment

圖20 近10年中國學者發表的果園精準施藥相關科技論文統計Fig.20 Statistics of scientific and technological papers related to precision pesticide application in orchards published by Chinese scholars in past 10 years

圖21 樹冠參數檢測分區Fig.21 Detection segmentation of canopy parameter
在基于單目/雙目相機獲取冠層結構方面,XIAO等[90]提出一種基于Kinect景深提取算法的果園智能精準噴藥技術,通過Kinect深度圖像和彩色圖像結合獲取LWA區域圖像(圖22),然后根據LWA的平均距離調整噴施距離,再根據LWA密度調整噴施劑量,能夠提高農藥噴施效率,減少浪費和環境污染。

圖22 目標樹提取過程Fig.22 Procedure of target tree extraction
在作業效果方面,孫誠達等[91]開展了風送噴霧霧滴冠層穿透模型構建及應用的研究,構建霧滴穿透比例二次指數數學模型,對分析霧滴分布規律有一定參考價值,但需進一步分析噴霧壓強、管路流量、環境溫度、濕度等因素的影響。ZHAI等[92]設計了一種空氣輔助噴霧的噴嘴霧滴沉積特性測試系統,在空氣輔助噴霧條件下,風速越大,液滴沉降受重力影響越小,同時隨著風速的增大,噴霧幅度會相對減小。
與地面植保裝備相比,航空植保裝備具有轉場便捷、機動靈活、場地適應性好等優點[93],近年來得到快速發展。GAO等[94]開展了基于機器學習方法的無人植保機噴霧區域與非噴霧區域識別的研究,并分別進行了農田和果園的試驗,離線識別成功率分別為74.4%和77%,在線識別成功率分別為65.1%和75.1%,平均識別時間為3.1 ms。ZHENG等[95]、張豪等[96]開展多旋翼無人機施藥風場的計算流體動力學(CFD)研究,分別得到風速對噴霧范圍、沉積均勻度、穿透度等因素的影響和無果樹、有果樹下的氣流分布特點,為無人機施藥提供了理論參考和作業參數優化方法(圖23)。

圖23 多旋翼無人機風場仿真Fig.23 Wind field simulation of multi-rotor UAV
2.5 果園采摘收獲機械
采摘作業所需勞動量大,具有季節性強和勞動密集等特點,目前果園采摘方式主要包括人工采摘、機械采摘和智能采摘等。
2.5.1國外研究現狀
美國20世紀40年代開始研究振搖式采摘機械,隨后在歐美國家得到快速發展與應用。PACHECO[97]設計了用于蘋果采摘的彈簧沖擊式振動器,能夠提供1 151 J的沖擊能力。PEZZI等[98]應用VL6060型自走式葡萄收獲機(圖24)研究了振動強度和振動頻率對葡萄采摘的影響。NGUYEN 等[99]開發了蘋果收獲機器人(圖25),針對避障與蘋果收獲需求,設計了分層任務框架,并進行了仿真測試與試驗,在確保任務與執行部件正常通訊的情況下能夠順利完成收獲任務。

圖24 自走式葡萄收獲機Fig.24 Self-propelled grape harvester

圖25 蘋果收獲機器人Fig.25 Apple harvesting robot

圖26 M-300M型單軌運輸機Fig.26 M-300M monorail transporter
1966年日本NIKKARI最早研發并推廣應用單軌運輸機,其最新的農用M-300M型(圖26),機頭加單貨箱的尺寸(長×寬×高)為3 160 mm×610 mm×790 mm,最大適應坡度達45°,可以輔助采收果實與生產資料的輸運,極大地降低了陡丘陵山區的生產勞動強度。
2.5.2國內研究現狀
人工采摘是我國丘陵山地果園采摘作業的主要方式,主要是通過直接手采或者借用手持式采摘工具進行作業,冠層中上部位果實一般是通過搭建扶梯或者攀爬完成采摘,人員上下和果實輸送不便,不僅效率低、勞動量大,而且容易造成果實的損傷。完全依賴人工的采摘方式已不能適應林果產業的發展,機械化采摘和智能化采摘是減少果園采收成本、提高經濟效益的有效途徑。
(1)機械采摘
振動式收獲技術是目前實現條件最容易、效果最明顯的機械收獲方式,其原理是將振動機構的機械振動傳遞給果樹,使果樹以一定的頻率和振幅振動,從而使果枝上的果實以某種形式的振動而加速運動,當果實的慣性力大于與樹枝的結合力時,果實脫落完成收獲過程。能夠提高收獲效率、降低收獲作業成本,對適時收獲具有重要的現實意義,適用于棗類、釀酒葡萄、非鮮食類(加工)類水果的采收。
付函等[100-101]在蘋果碰撞損傷機理的研究基礎上,設計了適用于棚架樹形的慣性樹枝激振裝置,通過曲柄滑塊機構將電動機旋轉運動轉化為直線運動,帶動樹枝振動,收獲的果實有89.5%~96.3%能夠達到美國農業部鮮蘋果市場質量分級標準,但是激振點的位置以及激振頻率的選擇仍需進一步研究。喬園園等[102]設計了牽引式林果振動采收機,采用偏心振動方式產生激振力,使果樹振動,果實脫落進接果帆布中,但未說明激振位置及振動頻率的依據,且整機(長×寬×高)為6 500 mm×1 600 mm×2 000 mm,尺寸較大,在丘陵山區果園適用性較差。PU等[103-104]設計了一種基于曲柄搖桿機構急回特性的聯動振動機構,由上振動系統和下振動系統組成,分別搖動樹冠頂部和底部實現柑橘采收的差別化振動,減少樹冠損傷。以3 km/h的行駛速度和4.7 Hz 的振動頻率對柑橘進行振動采收時,其收獲效率為 360~500棵/h,果實采收率達82.6%,而樹冠損傷率僅為 5.4%;袁盼盼等[105]針對釀酒葡萄機械化采收時對植株損傷大、果粒破損率高、脫粒效率低等問題,設計曲軸式振動脫粒收獲裝置,可根據釀酒葡萄葉幕寬度調節間距。但只針對單一植株進行研究,實際葡萄園作業效果未知;散鋆龍等[106]建立了單偏心式和對稱雙偏心式振動激勵下杏樹響應模型以及杏樹-采收機動力學模型,研究了不同振動激勵下杏樹的響應狀態及杏樹最佳振動采收頻率;此外,HE等[107]、鮑玉冬等[108]、羅鋼[109]、彭俊[110]針對振動收獲過程中振動特性以及對果實的影響進行仿真與試驗分析研究,為果實振動采收技術的發展提供一定的理論依據。
機械采摘能夠完成果品收獲,節省勞動力,但是整棵果樹上的果實成熟時間不同,采用機械采摘裝備時,采收時期的選擇是影響產量的重要因素,收獲過程中容易使未成熟果實脫落,且果實損傷率較大。隨著智能化技術的發展,能夠進行自主識別果實并進行采摘的智能采摘技術開始出現,尤其是采摘機器人更是近年來的研究熱點。
(2)智能采摘
果園智能采摘系統一般包括移動機構、機械手、視覺系統、末端執行器以及控制系統。目前針對智能采摘技術的研究主要針對果實識別定位、路徑規劃以及自主導航等方面。
近年來,針對果園智能采摘機器人關鍵技術開展了很多研究[111-118],但是多處于實驗室開發階段或測試階段,實際果園作業中存在光照、嘈雜背景等諸多因素對果實識別定位有較大影響,尤其是丘陵山區果園地形條件差,存在排水溝、廢棄枝條等障礙物影響采摘機器人的自主作業,智能化采收技術與實際推廣應用還有很大差距。表8為中國果園采摘機器人關鍵技術的部分研究成果。
(3)索軌輸運系統
我國丘陵山地果園的地形特點,基本不具有車輛通行的條件,采收果實及生產資料的輸運主要采用人工背負、肩挑的方式。國內研究者借鑒日韓索軌輸運技術的經驗,改進牽引懸掛、抱軌夾持、上下托索限位等機構,提升現有索軌輸運系統的大坡度爬升能力、安全平穩性,為解決丘陵山區果園輸運問題提供了有效途徑。
洪添勝等[127]設計了一種山地橘園鏈式循環貨運索道(圖28),索道可根據地勢及果樹種植情況靈活架設,按一定間隔設置掛鉤,果農可隨意上載和卸下果品和生產物料,生產效率最大6.8 t/h。李善軍等[128]針對山地果園運輸勞動強度大、效率低的生產實際問題,設計了7YGS-45型雙軌道果園運輸機(圖29a),采用自走式作業方式,實現爬坡、轉彎、前進、倒退和任意點制動等功能,最大爬坡角47°,最小水平轉彎半徑8 m,平均運行速度1.0 m/s。張俊峰等[129]設計了一種山地果園遙控單軌運輸機(圖29b),單軌依地形鋪設,能夠適應不同地形條件的運輸需求;設計防脫軌防側倒裝置,防止運行時脫軌和側倒。考慮到索軌系統的建設成本,其對果園的覆蓋范圍有限,因此根據果園分布特點和經濟性進行規劃設計,建立軌/索、車合理配置的多維網格輸運系統,有效降低丘陵山區采收果實與生產資料輸運的人工與勞動強度。

表8 果園采摘機器人關鍵技術研究成果Tab.8 Research on key technologies of orchard picking robot

圖27 智能移動水果采摘機器人Fig.27 Intelligent mobile fruit picking robot
3 丘陵果園機械裝備生產與推廣現狀
為推進我國丘陵果園機械化進程,農機企業積極開展校企合作,進行了果園機械裝備生產開發與推廣應用。對中農博遠、一拖集團、福田雷沃、中聯重科、江蘇沃得、極飛、大疆等公司的農機產品進行了調研。
在動力底盤方面,一拖集團、福田雷沃等公司生產有大批農用拖拉機,針對丘陵果園作業環境來說,存在適用性較差的問題。
在果園作業平臺方面,中農博遠的3GP-155型自走式平臺(圖30a),寬度為1 690 mm,展開為3 010 mm,舉升高度為2 350 mm,能夠協助采摘、疏果、套袋等高位作業,適用于平緩地勢果園。圖30b為臨沂伯多祿公司的小型果園作業平臺,尺寸約為3GP-155的一半,采用履帶式底盤,越障能力和爬坡能力更好。
在植保機械方面,天鷹集團生產的TY-800型植保無人機(圖31)能夠在果園環境下全自主作業,最大載荷25 kg,噴幅7 000 mm,作業效率8~10 hm2/h;圖32為中農博遠生產的風送噴霧機與風送靜電噴霧機。

圖31 TY-800型植保無人機Fig.31 TY-800 plant protection UAV

圖32 中農博遠風送與靜電噴霧機Fig.32 Air-assisted and electrostatic pesticide sprayer
近年來果園機械裝備得到快速發展,在農機購置補貼等優惠措施下,相關生產企業增多,并進行了推廣。但是現有裝備中仍以平原果園機械為主,針對丘陵山地果園的適用機械裝備有限,尤其是陡丘陵果園,因此丘陵山地果園機械裝備具有廣闊的發展空間與應用前景。
4 丘陵果園機械化面臨問題與發展建議
4.1 丘陵果園機械化發展面臨的問題
(1)受特殊地理環境限制,丘陵山區果園規模小、地塊間坡度大,種植密度大、喬化程度高及管理粗放,難以改造為條件一致的規模化果園,嚴重制約了丘陵山區林果生產機械化的發展。
(2)丘陵果園可用裝備不足,高效經濟型專用裝備缺乏,除部分動力底盤、植保機械能夠在“整帶”后的緩坡地區適用外,其他生產環節基本無可用機械裝備,特別是陡丘陵果園勞動強度大的生產環節“無機可用”是實現機械化的現實難題。
(3)立地條件差、地形條件差、種植制度復雜等是制約果園機械化發展的主要因素,雖然學者針對丘陵果園的特殊性進行了一系列生產技術與機械裝備的開發研究,但是對復雜環境條件的適應能力仍然是瓶頸問題,也是影響其推廣應用的關鍵因素。
4.2 丘陵果園機械化發展建議
隨著林果業的發展,果園機械化程度勢必會影響果農的經濟效益,產業結構調整造成大批勞動力轉移,傳統人工作業方式已滿足不了林果業經濟發展的需要。在現有的果園裝備與機械化生產基礎上,提出階段性發展建議:
(1)經濟型機械化生產探索階段(模式1.0):針對目前丘陵果園專用裝備缺失,通用裝備適應性差問題,開展作業測評、組合選型和適用性改造等工作,解決部分環節生產機械爬坡越障能力、人機作業安全、環境適用性及性價比不能滿足經濟性要求的問題,打破丘陵山區梯田式果園與原生態果園 “無機可用”的局面。
(2)經濟型機械化生產適配階段(模式1.0+):學習意大利、日本的山地種植環境整改經驗,進行宜機化改造建園和種植模式改善,提高農藝與農機結合程度,為機械裝備進園作業提供條件。在動力底盤、冠層管理、植保及采收與輸運系統等方面優化改進、研發創制適用技術裝備,形成輕簡化成套裝備,提高丘陵果園機械化水平。
(3)大范圍機械化生產階段(模式2.0):結合新技術提升裝備的智能化水平,形成能夠適應階梯地塊大坡度、高頻次轉場的自走式智能調平高位作業平臺,具有坡地靶標識別定位與噴霧角度實時調節的地面精準對靶仿形施藥裝備,可適用不同樹形修剪要求的多段可變幅自動化剪枝裝備,全冠層高效均勻施藥的地面與無人機立體協同精準植保系統等技術與裝備,實現全環節機械化生產,并在部分環節實現自動化、智能化作業,推進丘陵山區林果業向現代高效模式轉化的進程。
猜你喜歡
小主人報(2022年1期)2022-08-10 08:28:44
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
學生天地(2020年17期)2020-08-25 09:28:54
作文成功之路·小學版(2020年7期)2020-08-24 08:19:30
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
作文成功之路·小學版(2020年7期)2020-01-02 10:10:44
趣味(數學)(2018年12期)2018-12-29 11:24:10
小學生作文(中高年級適用)(2017年10期)2017-11-13 06:01:00
能源(2016年2期)2016-12-01 05:10:46
故事大王(2016年7期)2016-09-22 17:30:08
