航天器太陽圓面速度差/太陽視方向組合導航
2020-12-02 08:33:34寧曉琳黃玉琳晁雯
航空學報 2020年9期
寧曉琳,黃玉琳,晁雯
1. 北京航空航天大學 前沿科學技術創新研究院,北京 100083 2. 北京航空航天大學 儀器科學與光電工程學院,北京 100083
深空探測是中國航天白皮書中的一項占有極高地位的規劃任務,而天文導航是航天器在執行深空探測任務時的一種有效自主導航方法,擁有成本低、自主性強、誤差不積累等優勢[1]。現有的天文導航方法根據所使用天文量測信息的不同,大致可分為3類:利用天體敏感器提取天體角度信息的天文測角導航[2-6]、測量脈沖信號TOA提取距離信息的天文脈沖星測距導航[7-9]及利用光譜儀測量相對多普勒速度信息的天文光譜測速導航[10-12]。每一種導航算法都有其各自的特點與局限性,尋找一種新的天文量測信息以及新的導航技術是非常有價值的。
多年來各國都在開展對于太陽的探索[13-17],隨著科技進步,對于太陽的了解也越來越深入。早在1612年,Galileo就通過觀察太陽表面的黑子的活動發現太陽是自轉的。Howard和Harvey通過光譜觀測,發現太陽表面存在較差自轉[18]。隨后,一些國內外學者對太陽較差自轉模型及其隨時間的變化進行了研究[19]。這些研究表明太陽的較差自轉導致太陽不同點的速度是不同的。太陽多普勒速度是一種重要的量測量[20],目前已有的基于太陽多普勒速度導航方法中通常都是將太陽看作一個點,而實際上,探測器觀測到的太陽是一個圓盤,并且探測器從不同的角度觀測到的太陽圓面上不同位置處的多普勒速度也是不同的。這一速度信息與航天器的位置之間存在可建模的數學關系,從而可以作為量測量估計航天器的位置信息。為了消除測量誤差和太陽自身不穩定造成的誤差,本文提出將太陽圓面上相隔180°的2個對徑點的太陽圓面多普勒視向速度的差值,簡稱太陽圓面速度差作為天文量測信息,其幾何本質是提供了一個探測器的位置圓錐。在此基礎上,將太陽圓面速度差和太陽視方向進行組合,提出了一種基于太陽圓面速度差/太陽視方向的組合導航新方法。
本文基于太陽圓面速度差/太陽視方向的組合導航方法的基本原理,首先介紹了太陽的較差自轉和太陽圓面上不同點的多普勒速度的計算公式,其次闡述了太陽圓面速度差的獲取和幾何意義以及太陽圓面速度差與太陽視方向的互補性,量測量的獲取與模型建立,然后給出了基于太陽圓面速度差/太陽視方向的組合導航方法的系統模型,最后通過仿真證明了基于太陽圓面速度差/太陽視方向的組合導航方法能有效提升導航性能。此外,本文還對影響導航精度的主要因素,包括光譜儀精度、采樣周期和光譜儀數量進行了詳細分析。
1 太陽較差自轉和太陽圓面上不同點的多普勒速度
1.1 太陽較差自轉
有學者通過觀察太陽黑子,太陽光譜等建立了太陽較差自轉速率模型,并對其隨時間的變化進行了研究,結果表明太陽較差自轉導致太陽圓面上不同點的速度不同[21-22]。太陽表面自轉速率隨緯度的變化而變化,其較差自轉率可表示為
ω=a+bsin2φ+csin4φ
(1)
式中:ω為太陽上某一點的角速度,單位是(°)/d;φ為該點的緯度;a、b、c為常值,單位是(°)/d,a=14.713±0.049,b=-2.396±0.188,c=-1.787±0.253[23]。
由式(1)可得太陽圓面上的不同點的自轉線速率為
v=ωRscosφ=(a+bsin2φ+csin4φ)Rscosφ
(2)
式中:Rs=6.955×105km為太陽半徑。
1.2 太陽圓面上不同點的多普勒速度
如圖1所示,在日心慣性空間直角坐標系O-xyz中,太陽圓面上M點的經度和緯度分別為β、φ。
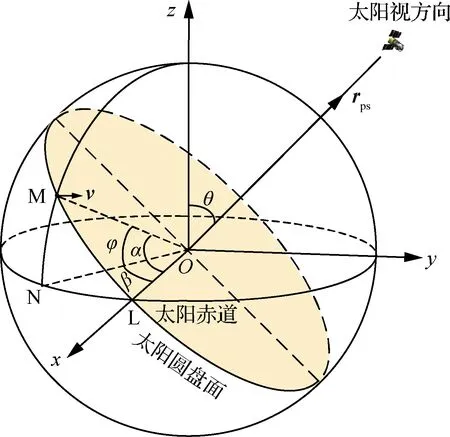
圖1 日心慣性空間直角坐標系Fig.1 Heliocentric inertial space rectangular coordinate system
則速度v在太陽視方向上的投影速度vr大小為
(3)
2 太陽圓面速度差的獲取和幾何意義
2.1 太陽圓面速度差的獲取
如圖2所示,在探測器上安裝4個光譜儀SpA、SpB、SpC、SpD,并使其光軸與四棱錐的4條棱一致,S為太陽探測器質心,S′為四棱錐底面外接圓的圓心,δ為光譜儀光軸與四棱錐中心軸線的安裝角,R為四棱錐底面外接圓的半徑,h為四棱錐的高,可以得到
(4)
在太陽質心坐標系下利用4個光譜儀可測量得到太陽圓面上2組相互垂直的點A、B、C、D的速度分別為vA、vB、vC、vD。
經過計算可以得到4點之間的速度差值分別為δAB=vA-vB,δAC=vA-vC,δAD=vA-vD,δBC=vB-vC,δBD=vB-vD,δCD=vC-vD。
設量測量Zk=[δAB,δAC,δAD,δBC,δBD,δCD]。
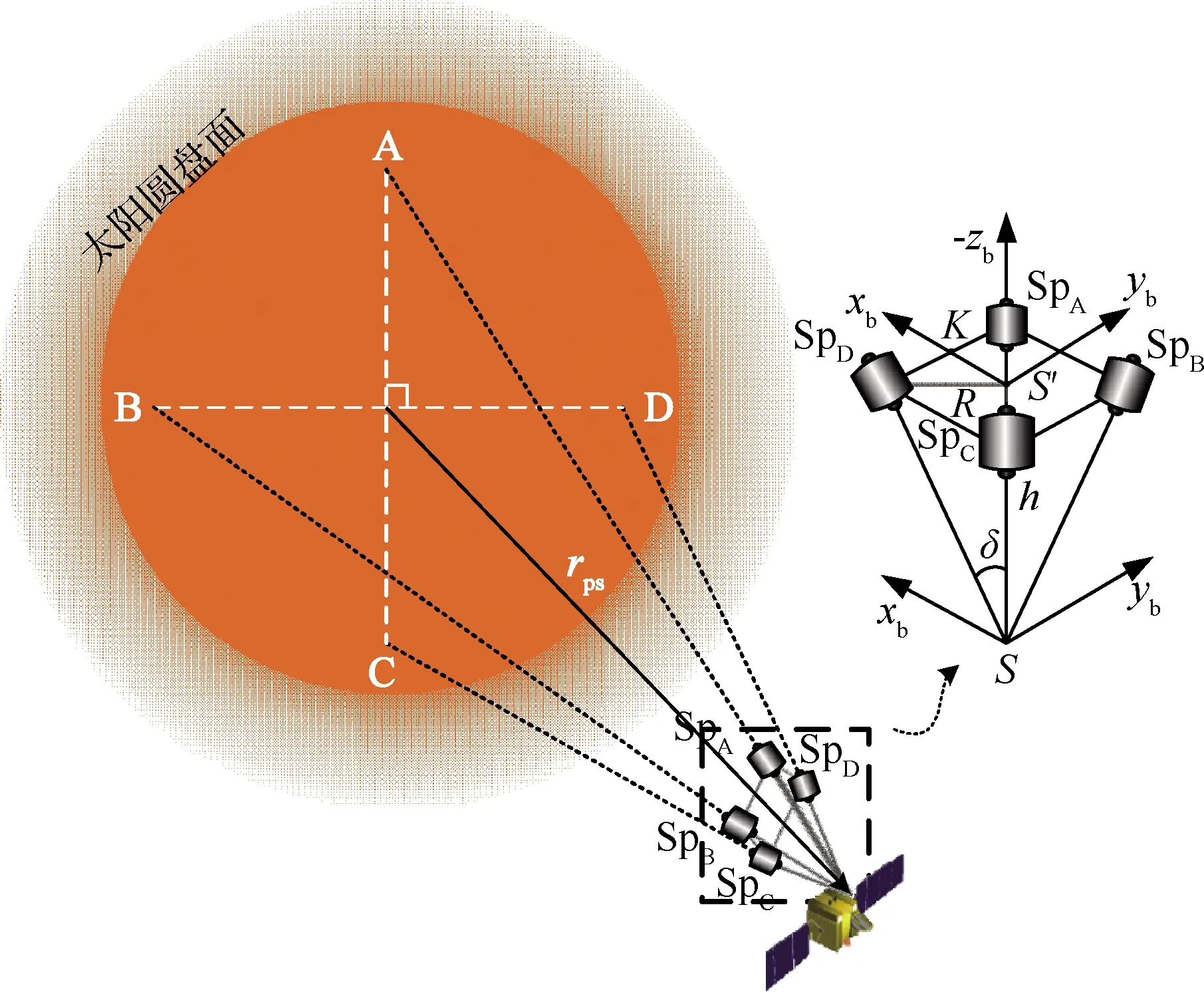
圖2 光譜儀測量太陽圓面上的多普勒速度Fig.2 Measurement of Doppler velocity on the Solar disk by spectrometer
2.2 太陽圓面速度差的幾何意義
如圖1所示,在日心慣性空間直角坐標系中,∠MOL=α,θ為太陽自轉軸和太陽視方向的夾角,稱為太陽自轉軸觀測角。為了簡化證明,進行坐標變換,令x,y軸繞z軸旋轉,使得rps位于yz平面內,則太陽視方向可表示為rps=[0,sinθ,cosθ]T,M點的速度v在太陽視方向上的投影速度vr大小可表示為
vr=v·rps=vcosβsinθ
(5)
(6)
則太陽圓面上相差180°的兩點處的投影速度差為
(7)
在球面直角ΔMLN中,sinφ=sinαsinθ,將其代入式(7),結合式(1),可得
dv=2Rscosαsinθ(a+bsin2αsin2θ+csin4αsin4θ)
(8)
對于太陽圓面上2組互相垂直的點,可以得到2個速度差dv1、dv2,且α∈(-π,π),θ∈(0,π)。由式(8)可得
(9)
將光譜儀測量得到的數據dv1、dv2代入式(9) 便可解算出太陽自轉軸觀測角θ和α。
通過太陽自轉軸觀測角θ,可知探測器必位于以太陽為頂點,以θ為錐心角的圓錐面上(如圖3所示),也即太陽圓面速度差的幾何意義。
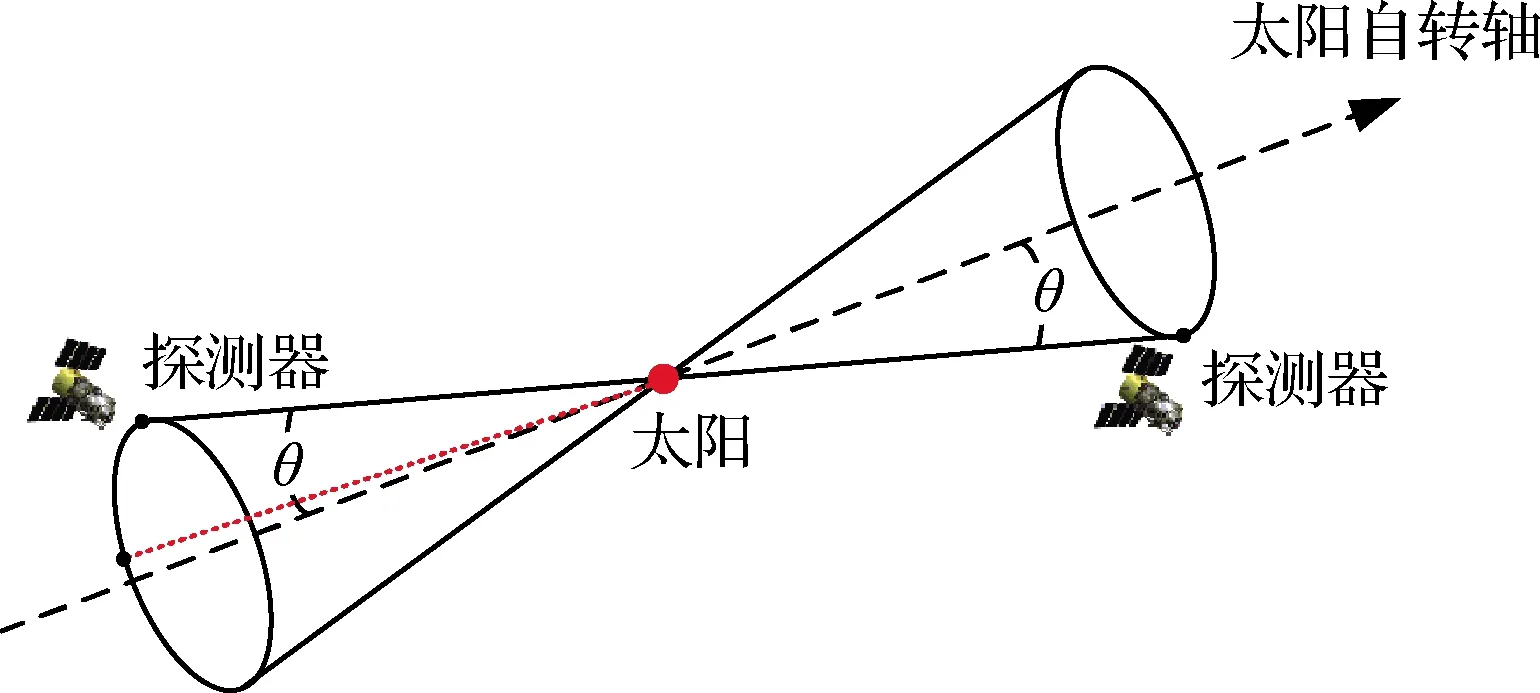
圖3 探測器的位置信息Fig.3 Location information of solar explorer
2.3 太陽圓面速度差與太陽視方向的互補性
從2.2節可以看出,太陽圓面速度差可確定一個探測器的位置圓錐,但僅靠這一信息,單次觀測不能完全確定探測器的位置,雖然可以通過連續觀測,結合軌道動力學確定探測器的位置,但會影響收斂速度。利用太陽敏感器可測量得到太陽方向的量測量,即太陽的高度角與方位角,從而確定探測器是在上述圓錐的哪一條錐線上。
3 基于太陽圓面速度差/太陽視方向的組合導航方法
基于太陽圓面速度差/太陽視方向的天文組合導航方法,其系統模型以探測器軌道動力學方程為基礎,并采取卡爾曼濾波技術[24]來估計探測器的具體位置和速度信息。本節給出了該方法的狀態模型與量測模型。
3.1 狀態模型
太陽探測器的運動方程可看作一個二體模型,其以太陽為中心天體[25]。在太陽質心坐標系下狀態模型可表示為
(10)
式中:rps、vps為探測器相對太陽的位置、速度矢量;μs為太陽的引力常數;w1為過程噪聲。
設狀態量為Xk=[rps,vps]T,過程噪聲為Wk-1,則太陽質心慣性坐標系下的狀態模型式(10) 可簡寫為
Xk=f(Xk-1,T)+Wk-1
(11)
式中:T為采樣時間。
3.2 量測模型
3.2.1 太陽圓面速度差的量測模型
以太陽圓面速度差為量測量的量測模型主要包括以下4個重要步驟:
1) 計算A、B、C、D 4點在探測器本體坐標系下的位置矢量
對于本體坐標系S-xbybzb,其原點位于探測器的質心。設本體坐標系下光譜儀指向太陽圓面上的A、B、C、D 這4點的方向矢量分別為
(12)
2) 計算A、B、C、D 4點在太陽慣性系下的經度和緯度


(13)
(14)
(15)

3) 計算太陽慣性系下太陽圓面上不同點的多普勒速度

4) 計算太陽圓面上不同點的多普勒速度差值
為了消除光譜儀自身誤差及太陽自身速度的影響,以太陽圓面速度差為量測量,其可記作
(16)

綜上,基于太陽圓面速度差的新型天文導航方法的量測模型可由式(14)~式(16)計算得到
(17)
式中:h1(·)為步驟1~步驟4的整個計算過程;V1,k為量測噪聲。
3.2.2 太陽視方向的量測模型
以太陽視方向,即高度角η與方位角φ作為量測量時的量測模型可以寫為
(18)
式中:vη、vφ為量測噪聲。
設Z2,k=[η,φ]T,量測噪聲V2,k=[vη,vφ]T,則以太陽視方向為量測量的傳統天文導航方法的量測方程為
Z2,k=h2(Xk)+V2,k
(19)
式中:h2( )為太陽視方向量測量的非線性量測函數。
3.2.3 基于太陽圓面速度差/太陽視方向的組合導航
設基于太陽圓面速度差/太陽視方向的組合導航方法的量測量Z3,k=[Z1,k,Z2,k]T,量測誤差V3,k=[V1,k,V2,k]T,則基于太陽圓面速度差/太陽視方向的組合導航方法的量測模型可寫為
Z3,k=h3(Xk)+V3,k
(20)
式中:h3( )為組合系統的非線性量測函數。
結合無跡卡爾曼濾波(Unscented Kalman Filter,UKF)方法即可估計探測器的導航信息。基于太陽圓面速度差/太陽視方向的組合方法的流程如圖4所示。
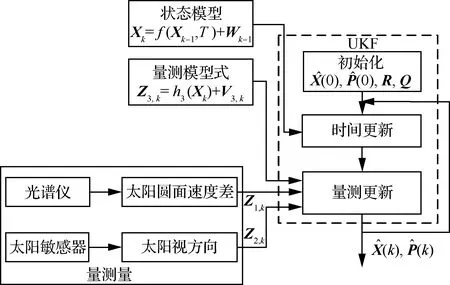
圖4 太陽圓面速度差/太陽視方向組合導航方法整體結構圖Fig.4 Overall structure of integrated navigation method of solar disk velocity difference and sun direction
4 仿真和分析
4.1 仿真條件
以太陽探測器為例進行仿真分析,仿真數據由STK (Systems Tool Kit)[27]產生。坐標采用J2000.0日心慣性坐標系,其長半軸a=1.07×107km,偏心率e=0.02,軌道傾角i=60°,升交點赤經為0°,近地點角距為0°。全部仿真時間為2個周期的時間。
光譜儀精度為0.1 m/s[28],光譜儀與日心矢量夾角δ=3.7°,太陽敏感器精度為28″[1],濾波周期為300 s。
4.2 仿真結果
利用UKF濾波方法對基于太陽圓面速度差/太陽視方向的組合導航方法進行仿真分析,并與僅使用太陽圓面速度差作為量測量和僅使用太陽視方向作為量測量的導航方法進行了比較分析。
4.2.1 3種量測量的導航結果比較
圖5、圖6和圖7分別給出了僅以太陽圓面速度差作為量測量、僅以太陽視方向作為量測量和以太陽圓面速度差/太陽視方向組合作為量測量的導航結果。表1給出了太陽圓面速度差、太陽視方向和太陽圓面速度差/太陽視方向3種量測量的導航方法濾波收斂后的仿真平均結果。仿真結果的統計時間段從第9天開始至結束。
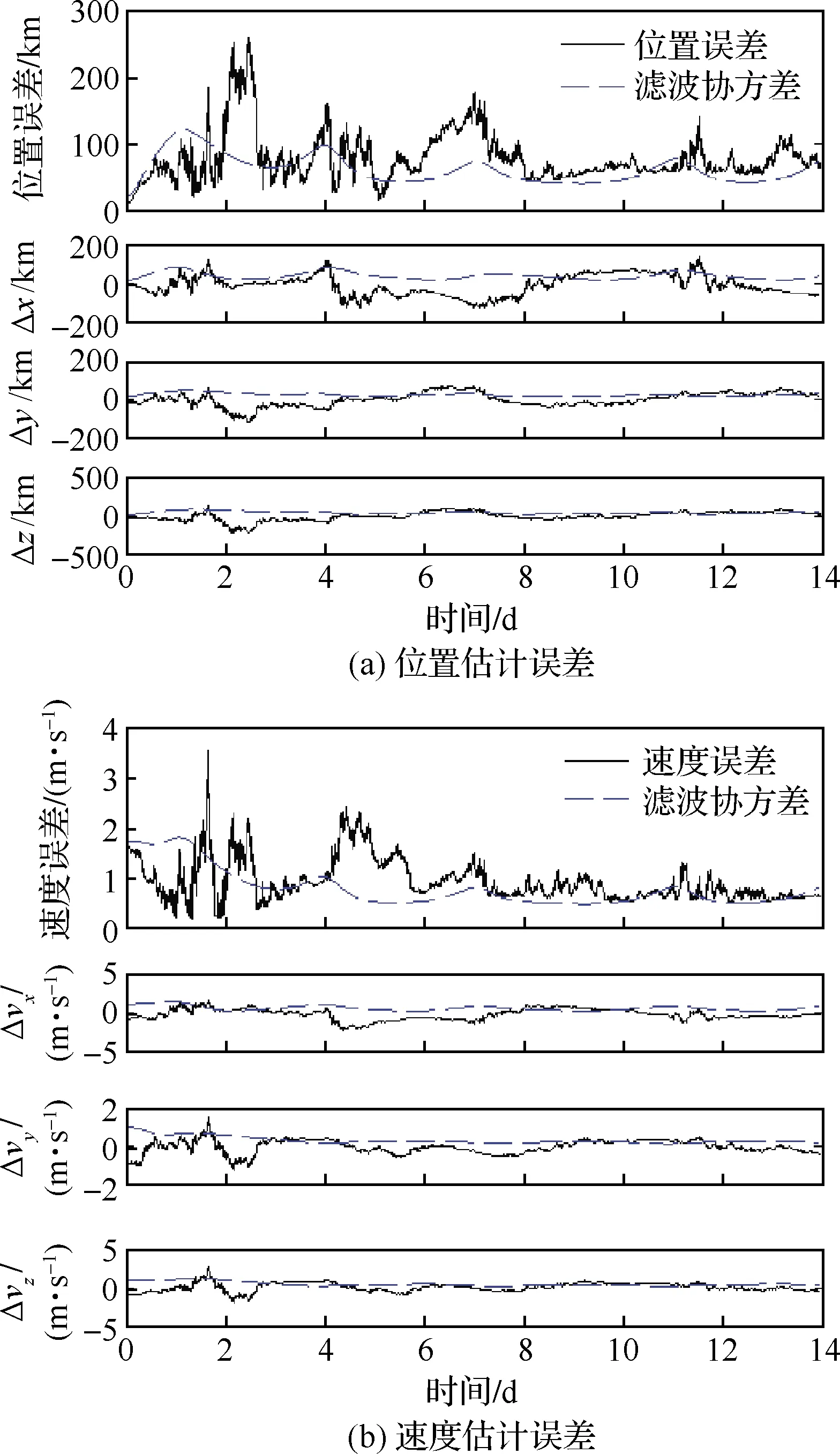
圖5 太陽圓面速度差為量測量的導航結果Fig.5 Navigation results of using measurement of velocity difference of solar disk
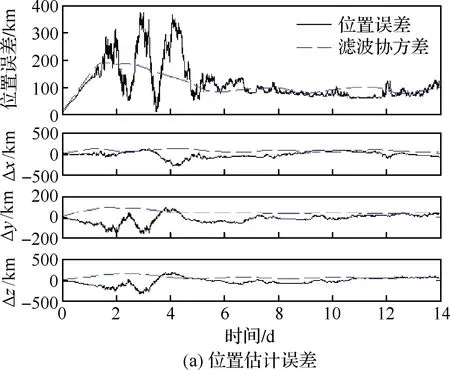

圖6 太陽視方向為量測量的導航結果Fig.6 Navigation results of using measurement of sun direction
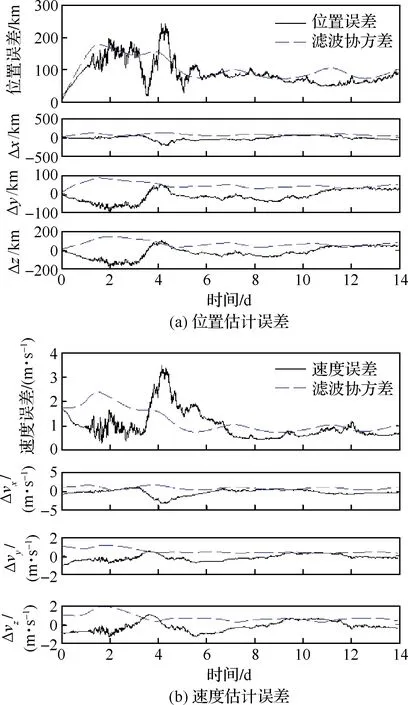
圖7 太陽圓面速度差/太陽視方向為量測量的導航結果Fig.7 Navigation results of using measurements of solar disk velocity difference and sun direction
由圖5可知,僅以太陽圓面速度差作為量測量時,估計誤差從第3天開始逐漸收斂且最大位置誤差低于300 km。由圖6可知,僅以太陽視方向作為量測量時曲線波動較大,最大位置誤差近400 km。由圖7可知,以太陽圓面速度差/太陽視方向作為量測量的組合導航方法曲線較為平緩且收斂性較好。由表1可知,3種方法中基于太陽圓面速度差/太陽視方向的組合天文導航方法的導航性能最好,精度相比較于單獨用太陽圓面速度差或太陽視方向作為量測量的導航方法分別提升了10.2%和16.0%。
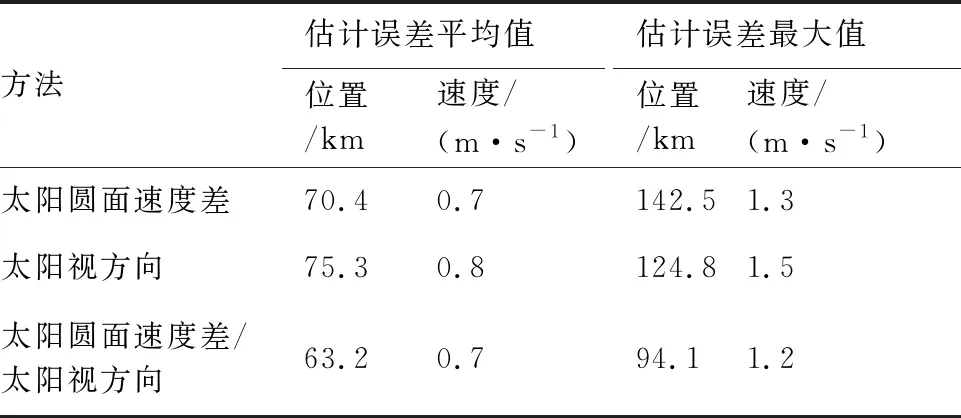
表1 3種方法的導航結果Table 1 Navigation results of three measurements
4.2.2 影響因素分析
在本節中,對基于太陽圓面速度差/太陽視方向組合導航方法在不同影響因素下的導航性能進行了仿真分析,包括光譜儀精度、采樣周期長短和光譜儀數量。仿真條件如4.1節所示。
1) 光譜儀精度對導航結果的影響
圖8和表2給出了在采樣周期為300 s,光譜儀數量為4的情況下,光譜儀精度分別為0.01 m/s,0.1 m/s,1 m/s,10 m/s,100 m/s時濾波收斂后的仿真平均結果。可見隨著光譜儀精度的降低,導航性能也在變差,當光譜儀的精度低于100 m/s時,基于太陽圓面速度差/太陽視方向的導航方法位置估計誤差會發散。
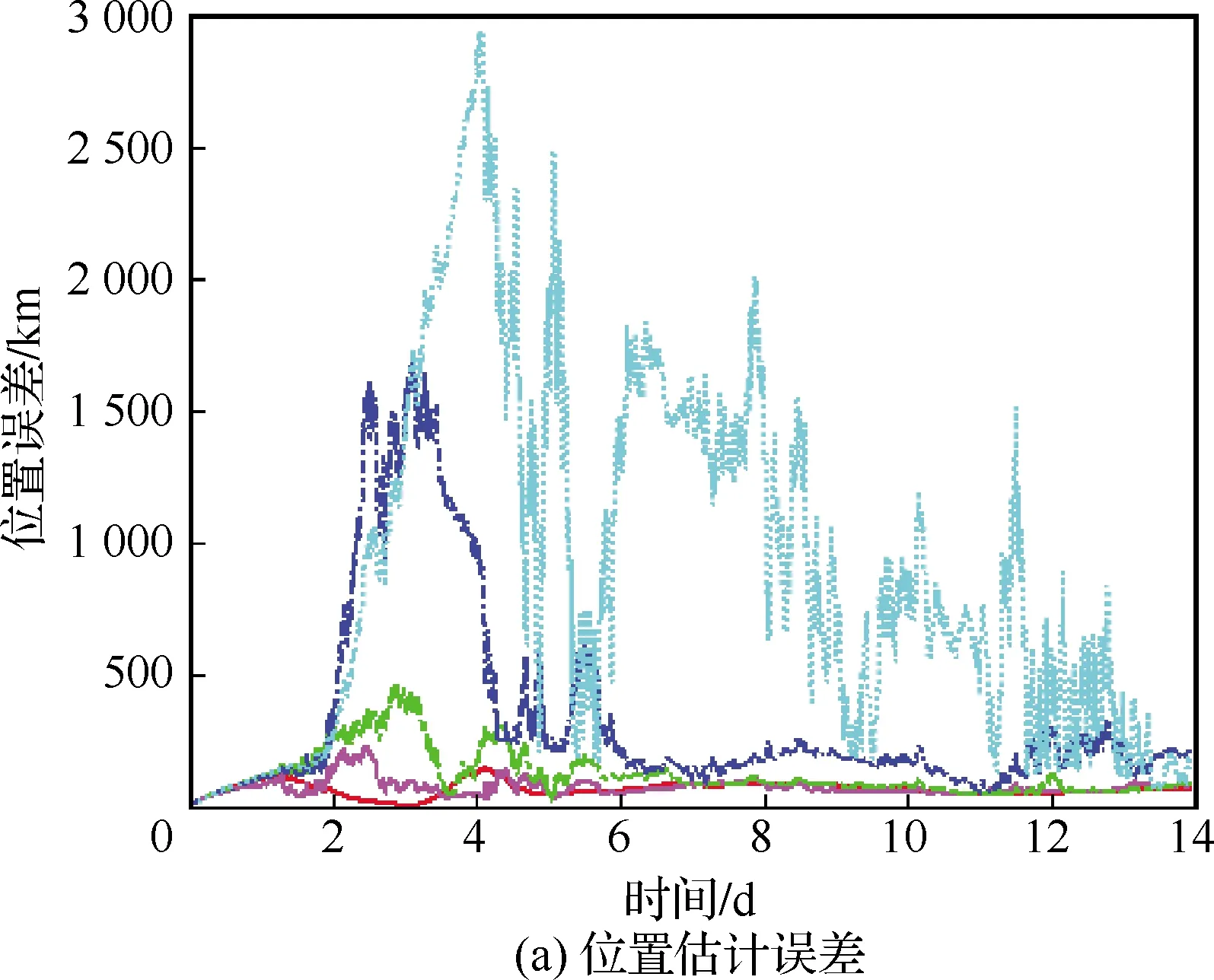
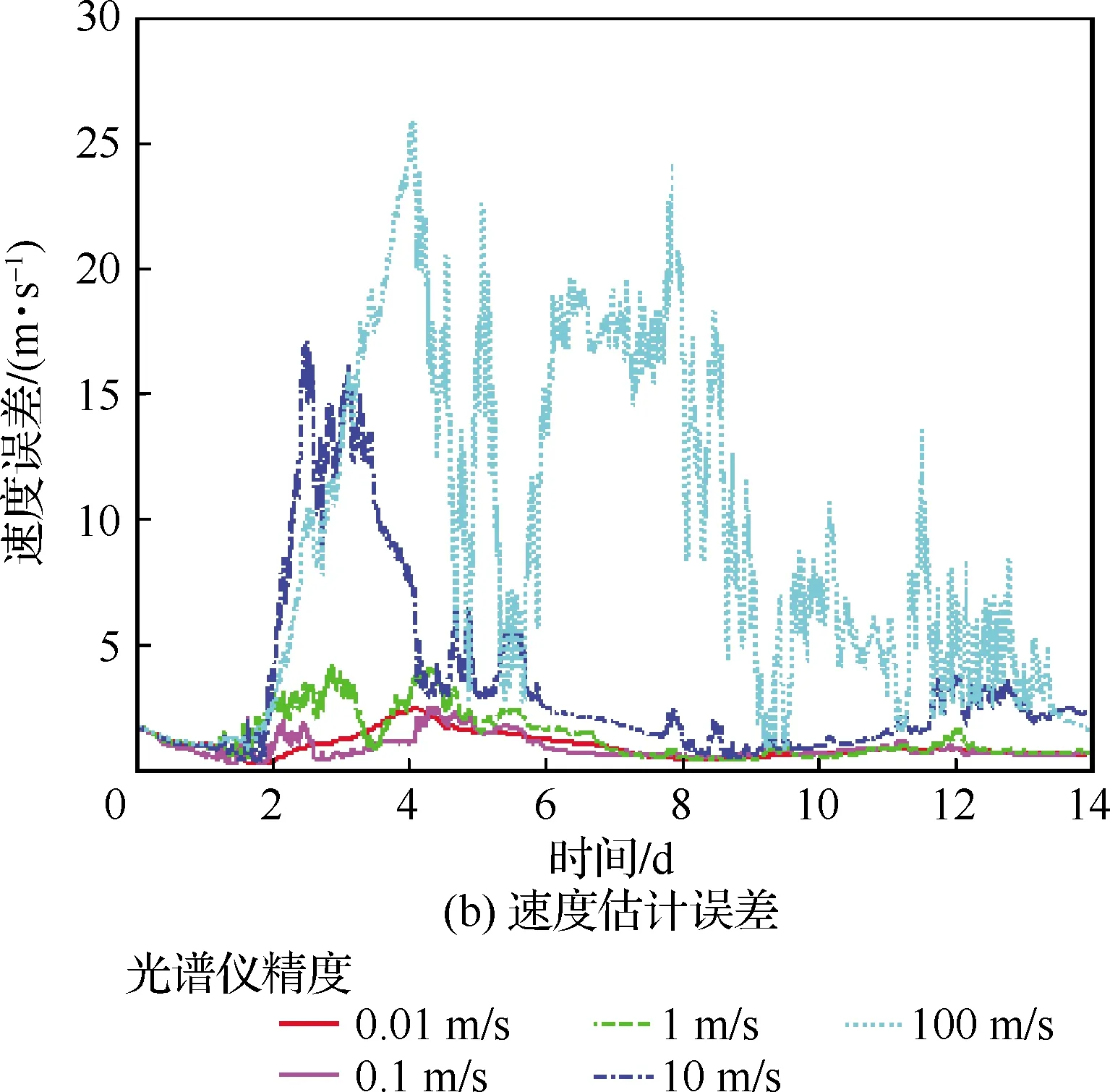
圖8 不同光譜儀精度對基于太陽圓面速度差/太陽視方向組合天文導航方法的影響Fig.8 Impact of different spectrometer precision on integrated celestial navigation method based on velocity difference of solar disk and sun direction
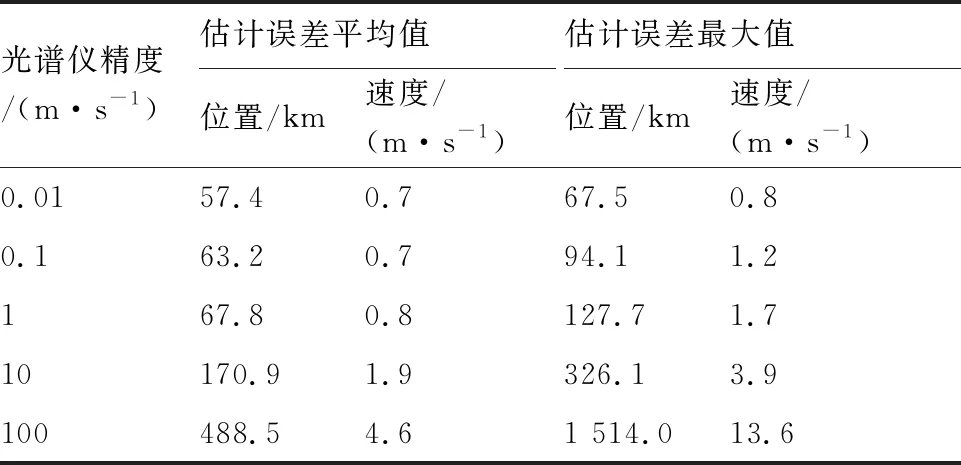
表2 不同光譜儀精度的導航結果
2) 采樣周期對導航結果的影響
圖9和表3給出了在光譜儀精度為0.1 m/s,光譜儀數量為4的情況下,采樣周期分別為60 s,120 s,300 s,600 s,900 s時濾波收斂后的仿真平均結果。可見采樣周期越短導航性能越好,隨著采樣周期的縮短,精度提升的速度也在變慢,因此調整采樣周期的長短對導航估計精度的提高是有限的。當采樣周期較長時,導航結果所受影響較大,原因是系統軌道動力學模型的線性化誤差較大,致使系統的性能下降。當采樣周期大于300 s時,估計誤差曲線波動幅度變大,導航性能較差。
3) 光譜儀數量對導航結果的影響
圖10和表4給出了在光譜儀精度為0.1 m/s,采樣周期為300 s的情況下,光譜儀的數量分別
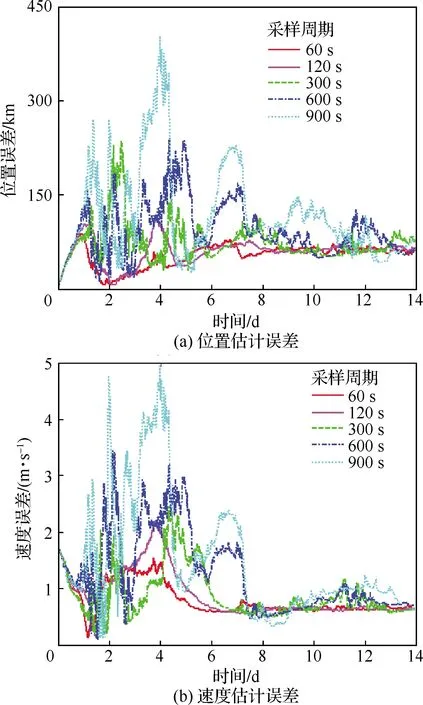
圖9 不同采樣周期對基于太陽圓面速度差/太陽視方向組合天文導航方法的影響Fig.9 Impact of different sampling time on integrated celestial navigation method based on velocity difference of solar disk and sun direction
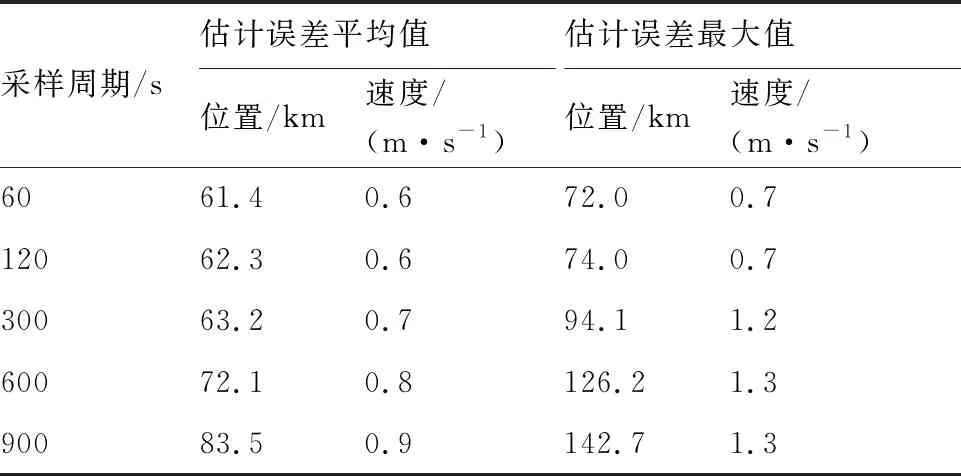
表3 不同采樣周期的導航結果
為2,3,4,量測量數量分別為1,3,6 時濾波收斂后的仿真平均結果。可見光譜儀的數量越多,位置估計誤差越小。這是由于光譜儀數量越多,所獲取的量測量數量越多,提供的量測信息越多,導航結果越好,但由于成本要求,精度的提高有限。
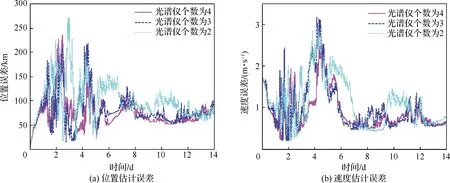
圖10 不同光譜儀數量對基于太陽圓面速度差/太陽視方向組合天文導航方法的影響Fig.10 Impact of different number of spectrometers on integrated celestial navigation method based on velocity difference of solar disk and sun direction

表4 不同光譜儀數量的導航結果
5 結 論
1) 本文提出了一種新的太陽圓面速度差天文量測量,并在此基礎上進一步提出了太陽圓面速度差/太陽視方向的組合導航新方法。利用太陽圓面速度差和太陽視方向互補的特性,將2種量測量結合起來,提高導航性能。仿真結果證明,相比較于使用單一的太陽圓面速度差和太陽視方向導航方法,太陽圓面速度差/太陽視方向組合導航方法能有效提升導航性能。
此外,在對組合導航進行影響因素分析時,可以看到在一定條件下,組合導航性能隨著光譜儀精度的降低而變差,隨著采樣周期的縮短與光譜儀數量的增加而提升。因此,在實際應用中,應根據具體需求,選擇合適的光譜儀精度、采樣周期與光譜儀數量。
2) 本文在使用信息融合算法進行組合導航時,使用了傳統的無跡卡爾曼濾波方法,且仿真實驗中僅對組合導航與單一量測量導航間的性能進行了對比研究,后續會根據需求和問題的深入分析對濾波算法,該方法與其他量測信息的特點比較進行更深入的研究。
猜你喜歡
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2021年4期)2021-04-20 14:06:36
計算機應用(2021年1期)2021-01-21 03:22:38
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
Coco薇(2016年2期)2016-03-22 02:42:52
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
