空空導彈雷達導引頭信息處理智能化思考
2020-12-03 00:55:00郭玉霞劉功斌崔炳喆
航空兵器 2020年5期
郭玉霞,劉功斌,崔炳喆,潘 亮
(1.中國空空導彈研究院,河南 洛陽 471009;2.航空制導武器航空科技重點實驗室,河南 洛陽 471009;3.94326部隊,山東 濰坊 261051)
0 引 言
人工智能技術是一門基于計算機科學、哲學、認知科學、腦科學、邏輯學等學科的技術。近年來,以深度學習為代表的人工智能技術得到了快速發展,并在圖像識別、語音識別、圍棋等領域取得了突破性進展,其在軍事領域的應用也正在深入拓展研究。
從軍事領域的發展及應用來看,人工智能技術是解決未來復雜電磁戰場環境下目標探測、抗干擾、抗雜波以及低空突防的重要手段,歐美國家早在20世紀90年代就開展了人工智能技術在目標探測、識別、抗干擾領域的應用和研究。
未來戰爭的關鍵是武器裝備智能化的競爭與較量。將人工智能技術與導彈武器精確制導技術相結合是提升導彈作戰能力的重要舉措。隨著航空武器的快速發展,以及信息化、網絡化、智能化[1-4]技術的大量應用,武器系統對智能化導彈提出了新的需求,多彈信息融合、智能組網、協同作戰等可以實現對敵目標的協同探測等。面對未來體系化的空戰形勢的需求,多彈協同、同構異構信息融合、智能決策、分布式作戰是導彈武器具備的關鍵要素,其實現的關鍵技術是智能導引頭。
未來戰爭是高科技的戰爭,也是海、陸、天、空、電五維空間的立體智能化戰爭,其中智能空戰是戰爭的主要形式,制空權和制電磁頻譜權決定著戰爭的勝負。本文結合智能化空戰需求,對空空導彈的雷達導引頭智能化展開分析。
智能化導彈的作戰模式大致可以分為3個階段,作戰準備階段、中制導階段和末制導階段,如圖1所示。在雷達型空空導彈系統中,導引頭作為彈上獲取、處理和提取外界信息的重要組成部件,需要具備目標檢測與識別、抗干擾、抑制地海雜波等功能,是實現智能作戰的中、末制導的關鍵環節,以及效果評估的直接參與者,其智能化程度直接決定了未來作戰智能化的深度和廣度。因此,智能信息處理是智能雷達導引頭的重要研究方向。
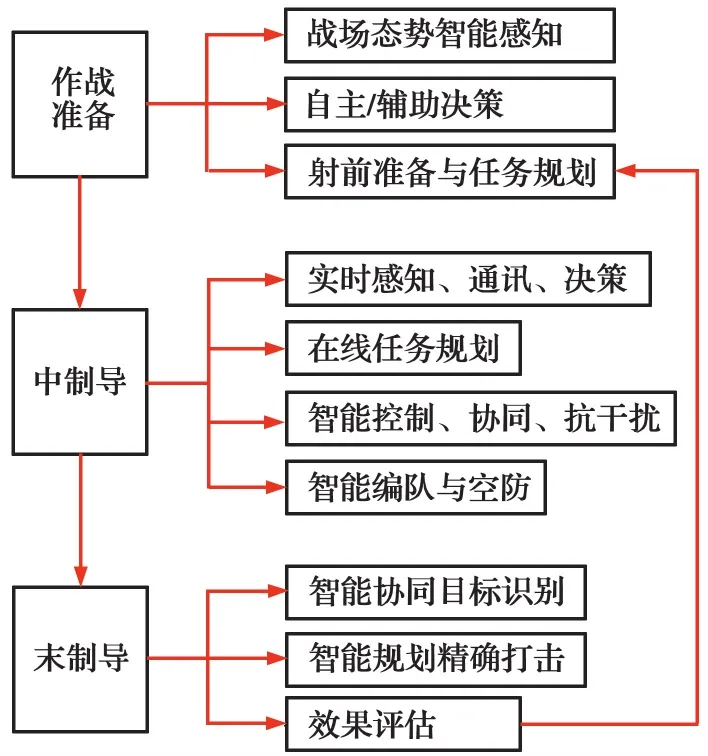
圖1 智能化導彈作戰模式Fig.1 The combat mode of intelligent missile
1 雷達導引頭探測面臨的挑戰
1.1 反隱身挑戰
雷達型空空導彈的對抗對象已由傳統的第三代戰機擴展為第四代隱身戰機[4],包括F-22,F-35,T-50等,以及無人機、巡航導彈在內的各類目標。與常規的第三代戰機相比,隱身戰機、無人機等目標的 RCS數量級降低,回波信號急劇降低,目標更加難以被探測。因此,提高雷達導引頭的反隱身[4]能力將成為探測隱身目標的重要選擇,直接關系到能否先敵發現、先敵攻擊,以及未來空戰中制空權奪取問題。
1.2 抗干擾挑戰
近年來的戰爭實踐表明,電子干擾總是率先發起并貫穿始終,對戰爭的進程和結果產生重要影響。基于對電子干擾作戰效果和戰略戰術地位的認識,美軍不斷加大電子干擾武器裝備的研發和投入,使得電子干擾手段日新月異。現代空戰中,空空導彈除了面臨支援干擾、自衛式干擾、箔條干擾外,還有近年來出現的新型角度欺騙類干擾。由于干擾信號在時頻域全面壓制回波信號,雷達跟蹤系統不能有效地區分出目標機和誘餌,從而跟蹤干擾,導致導彈脫靶,因此對雷達導引頭抗干擾性能提出挑戰。
1.3 抗雜波挑戰
現代空戰中,隱身戰機、無人機的大量裝備,目標的低空/超低空突防已成為常規進攻手段,低空/超低空目標的雜波、鏡像干擾是雷達導引頭需要面臨的主要問題之一,強地海雜波、以及云/雨/霧等氣象雜波將不可避免地影響到雷達導引頭的檢測性能。圖2為地雜波和氣象雜波采集圖形。
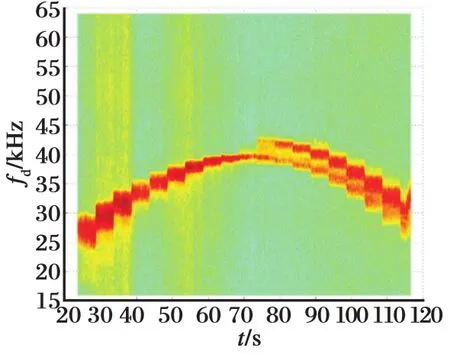
圖2 地雜波和氣象雜波采集圖形Fig.2 The gathered graphics of ground clutter and meteorological clutter
1.4 多任務挑戰
隨著空空、空地作戰任務,以及復雜戰場環境作戰的需求,空空導彈不僅需要攻擊空中目標,如大氣層內、外的隱身目標,高機動目標,預警機,以及臨近空間目標等,還肩負著攻擊海面、地面慢速移動的大型時敏目標,和固定高價值目標等任務,多任務作戰對雷達導引頭的體制、目標分類、目標識別等能力提出了新的需求。
2 導引頭信息處理現狀與典型框架
導引頭的智能化程度取決于信息處理軟硬件整體性能,其中軟件性能是關鍵。目前在通用的多片DSP+FPGA信號處理機架構下,雷達導引頭信息處理主要處于初級人工智能階段,即在程序化+自動化基礎上實現簡單的智能。導引頭典型的信號處理[5]框架如圖3所示。
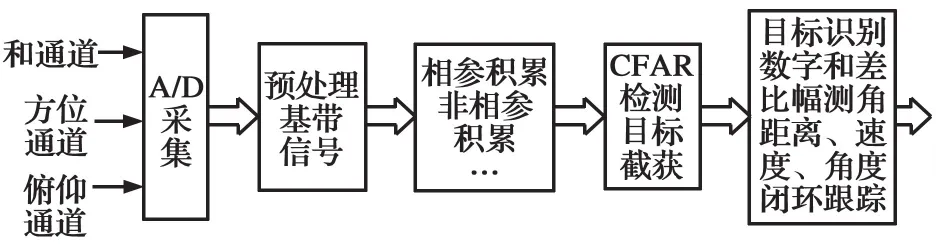
圖3 典型信號處理器的處理模塊框圖Fig.3 The processing module block diagram of a typical signal processor
結合雷達導引頭所面臨的挑戰,對導引頭信息處理在典型信號處理框架下的智能化現狀進行分析。
反隱身在雷達導引頭信息處理的應用,主要表現為弱小特征目標檢測技術,目前常采用長時間相參積累技術、檢測前跟蹤技術[6]等。長時間相參積累作為一種比較成熟的傳統檢測技術,對弱小信號檢測具有很好的提升作用,但對空中高機動目標檢測時,需要解決長時間積累引起跨距離和跨多普勒的“雙跨”問題。檢測前跟蹤技術是利用目標回波的相關性對多幀數據進行信號能量積累,然后進行目標檢測,對于噪聲高于信號的弱小目標檢測具有一定優勢,但對目標類型和運動特征等適用條件要求較高,同時未能利用目標的其他微弱特征。
建立時、頻、空和極化等多維信息融合技術,多波形組合頻率捷變技術等是抗干擾的重要方法。多維信息融合技術是利用目標與干擾源之間的特征差異來實現抗干擾,但其實現過程中需要多維數據源支撐和相應先驗信息。多波形組合的頻率捷變技術作為一種主動抗干擾方法,能很好地抗有源干擾,但回波信息的后端處理比較復雜,并對無源干擾和角度反射器等干擾的適用性較差。
在抗雜波方面,基于統計學、散射理論和非線性分析的地海雜波的目標檢測處理方法主要是采用統計假設檢驗的思想,利用能量檢測器、匹配假設等方法,進行強雜波的多普勒濾除,實現雜波背景下的目標檢測判決。但由于雜波的復雜時變性和弱規律混沌性等因素,這些方法的應用需要大量的數據積累和特征提取,對低速和靜止目標的檢測能力受限。
3 導引頭信息處理智能化發展思考
基于導引頭信息處理發展的初級智能化現狀,未來中級人工智能應具有如下特點,即雷達導引頭具有認知雷達反饋架構,充分利用深度學習算法,更好地應對復雜場景;而更高級的人工智能則可以實現多平臺智能協同、人機混合交互、自主智能感知等智能化水平。考慮到現階段工程應用的實際,本文對導引頭信息處理中級人工智能化,從三個方面提出思考。
3.1 微弱特征目標智能檢測技術
基于貝葉斯估計的粒子濾波[6-11]技術、深度學習的弱小信號檢測技術等,作為智能檢測算法,具有一定程度的自學習、自搜索能力,在微弱特征目標檢測方面,具有很大的應用潛力。
(1) 基于貝葉斯估計的粒子濾波技術
粒子濾波技術主要依據系統狀態向量的經驗分布,在狀態空間中產生一組被稱為粒子的隨機樣本集合,然后根據最新的觀測值不斷調整粒子的權重信息,從而對最初的經驗分布進行修正,最終利用目標狀態密度的濾波結果進行目標存在性判決,從而可以最終估計輸出目標的信息。同為90%的檢測概率時,與傳統的基于相參-非相參處理檢測算法的檢測系數13 dB相比較,基于貝葉斯估計的粒子濾波技術的檢測系數約8 dB,即檢測靈敏度改善約5 dB,如圖4所示。但是應用粒子濾波技術時,需要權衡大量樣本來保持粒子有效性,多樣性和有限樣本導致粒子退化。
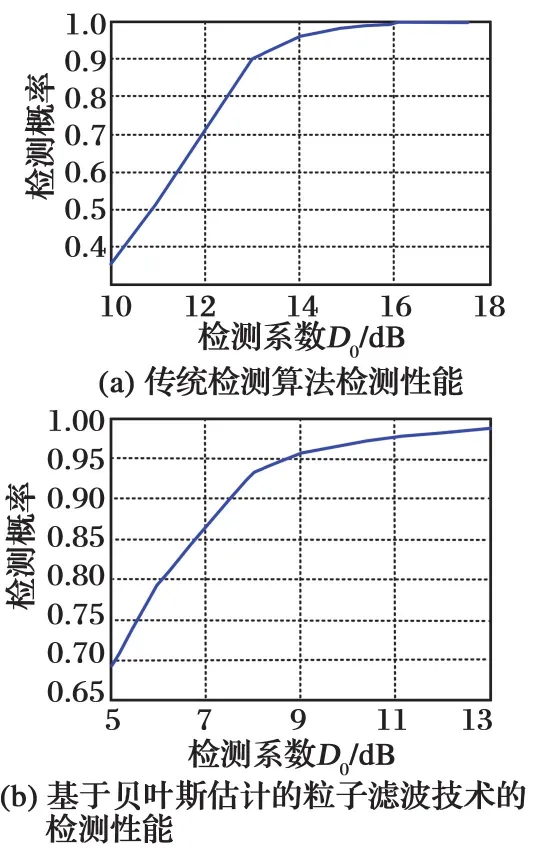
圖4 檢測性能比較Fig.4 Comparison of detection performance
(2) 基于深度學習的弱小信號檢測技術
通常基于相參-非相參的信號檢測算法容易受噪聲、雜波、干擾等因素影響。從國外近年的研究成果來看,基于知識輔助和智能學習的弱小信號檢測方法[9,12]是改善弱小目標探測的一個重要途徑。通過神經網絡模型和目標鑒別模型,發現可能的目標區域,進一步提取對尺度、環境、狀態不敏感的特征,利用回波信號的分析數據,構建基于特征及能量智能融合的目標檢測算法,實現對弱小目標的檢測功能,圖5所示為智能多特征融合目標檢測方法。應用中需要解決對抗環境下目標鑒別問題,同時,多層神經網絡模型設計也是一個挑戰。
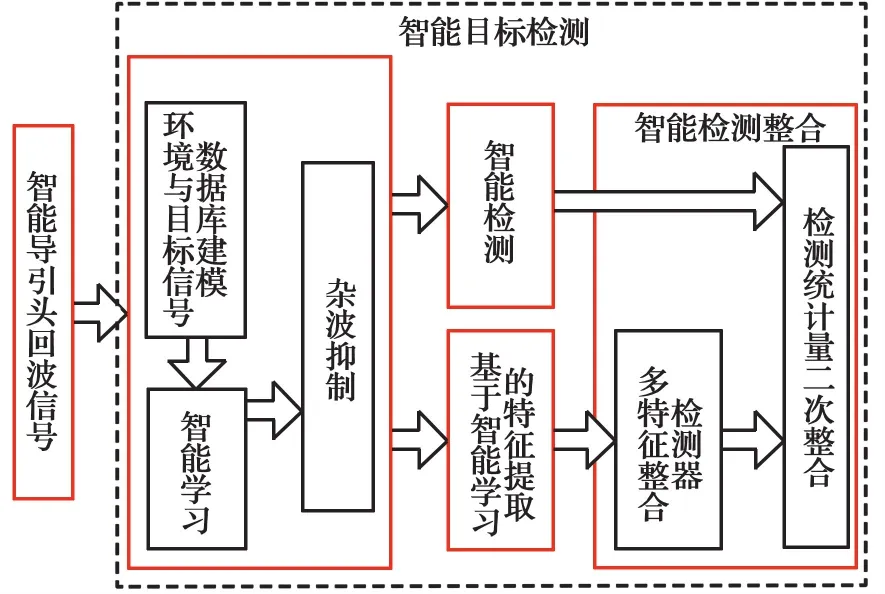
圖5 智能多特征融合目標檢測方法Fig.5 The target detection method of intelligent multi-feature fusion
3.2 智能抗干擾技術
基于隨機有限集的抗干擾技術和基于環境感知與深度學習的智能抗干擾技術等具有一定自組織、自學習能力,能夠更好地適應瞬息多變的戰場環境,實現抗干擾的電子戰博弈。
(1) 基于隨機有限集的抗干擾技術
基于隨機有限集[13]的抗干擾技術是將目標和干擾的聯合狀態作為系統狀態矢量,采用狀態相關雜波模型來描述系統的量測集,在貝葉斯框架下有效集成物理空間中的運動約束、行為差異性及干擾角度量測分布等先驗知識來實現系統貝葉斯后驗概率[14]的高效傳遞。在此基礎上,基于系統貝葉斯后驗概率完成目標、干擾的最優狀態估計和干擾類型辨識等。圖6~7所示為基于隨機有限集的目標估計和目標干擾估計情況。由于可用數據還不完備,建立在雜波相關理論的先驗知識在一定程度上限制了有限集的抗干擾技術應用。
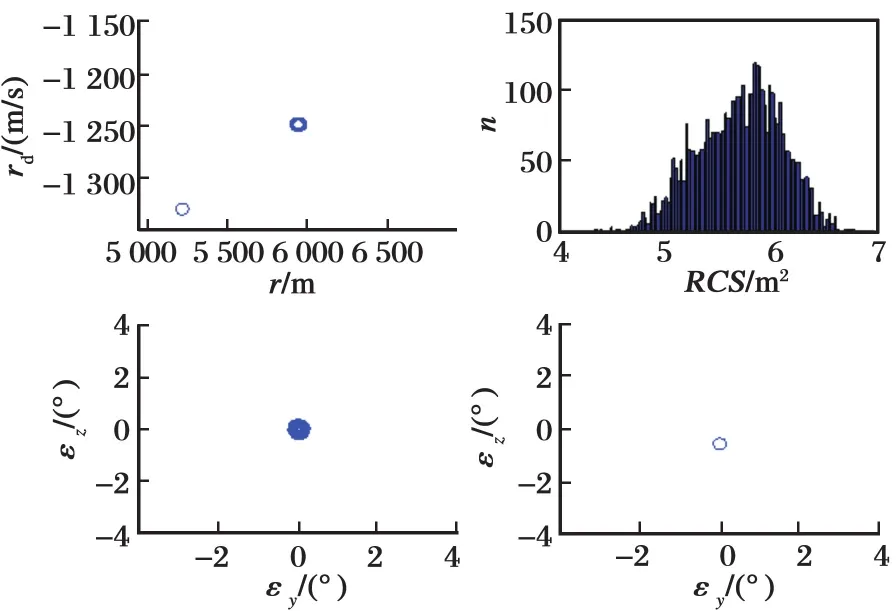
圖6 干擾環境下基于隨機有限集的目標估計結果Fig.6 The target estimation results based on random finite set in jammed environment
(2) 基于環境感知與深度學習的智能抗干擾技術
基于環境感知與深度學習的智能抗干擾技術是在信息化、網絡化作戰基礎上,賦予導引頭實時環境感知能力,同時具備智能學習能力,通過對周圍干擾等環境的實時感知、學習,實現多維目標和干擾特征的全面描述,同時基于深度學習或強化學習獲取最優的對抗匹配策略解,進而提高智能導引頭對抗自衛式和角度欺騙式干擾的能力。
智能抗干擾系統涉及發射系統、接收系數、目標跟蹤和戰場環境態勢感知等,具有閉環在線深度學習、在線自適應和在線智能決策等動態能力[9,13-16]。智能學習通過多層神經網絡等模型對雷達導引頭獲取的雜波、干擾、目標特征進行判斷評估,進而自適應地調整導引頭的工作模式、工作參數、工作波形、信號處理算法等,獲得最優解。圖8為基于環境感知與深度學習的智能抗干擾技術構成。建立數據共享的智能抗干擾系統,需要綜合解決目前空空導彈按艙段劃分的工作體制問題。
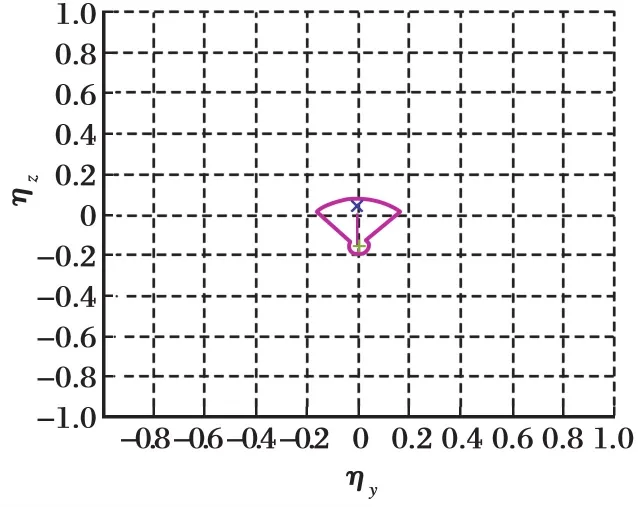
圖7 基于隨機有限集的目標干擾估計情況Fig.7 The target jamming estimation based on random finite set
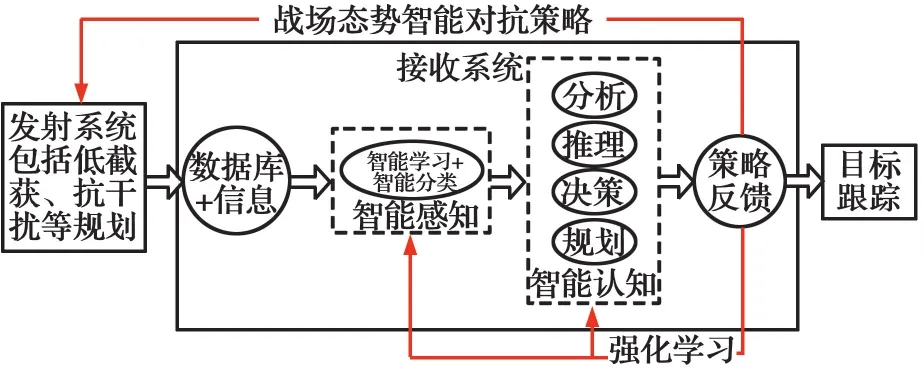
圖8 基于環境感知和深度學習的智能抗干擾Fig.8 Intelligent anti-jamming based on environmental perception and deep learning
3.3 智能雜波抑制技術
未來空戰中,面對低空突防目標,隨著地形或海情變化,以及時空分布的復雜特性,強地海雜波將不可避免地影響導引頭探測性能。基于雜波環境感知的智能雜波抑制技術[15-17]是建立在智能學習圖像降噪思想上,綜合考慮雜波特征,利用采集的雜波和目標回波數據,通過卷積神經網絡、分層神經網絡等智能學習算法,實現對雜波和目標特征的智能學習[18],從而確定雜波類型和特征,形成雜波環境的先驗知識,通過在線實時雜波特征提取和模式識別,自適應完成智能雜波抑制,實現目標和雜波的可靠鑒別,從而提高智能導引頭在雜波背景下的檢測性能。圖9為基于雜波環境感知的智能雜波抑制技術構成。雜波先驗知識的智能學習需要大數據支撐,而目前雜波數據有限,另外雜波理論、雜波分析算法有許多不足。
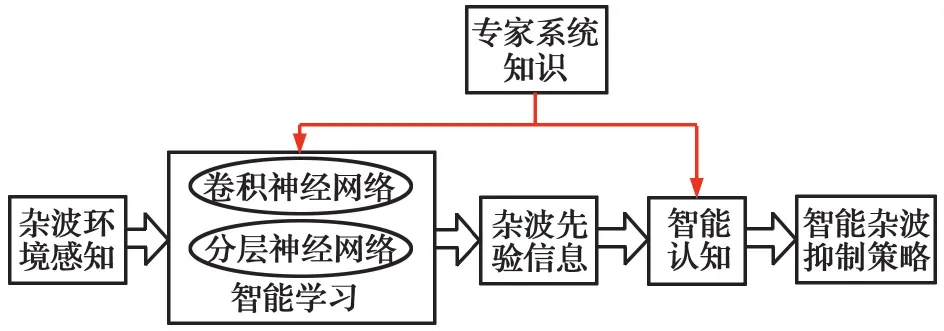
圖9 基于雜波環境感知的智能雜波抑制技術Fig.9 The intelligent clutter suppression based on clutter environmental perception
4 結 束 語
基于深度學習的智能信息處理技術在初步的仿真和試驗中驗證了其在目標探測、干擾識別、場景分類等方面的有效性,但在實際工程應用中尚需要解決大量的問題,如戰場環境復雜多變、訓練樣本數據有限,雜波理論模型不完備以及多層神經網絡模型不足等問題。如何在小樣本、小體積、大動態場景下實現基于深度學習的雷達性能提升是需要解決的重要問題。因此,在智能化信息處理發展過程中,可以從多個方面,逐層推進智能化雷達導引頭技術,如開展波形認知的雷達信息處理、知識輔助的雷達信息處理等,同時加強基于大數據支撐的智能化信息處理技術研究。后續加快智能化雷達導引頭領域關鍵瓶頸技術的突破,進一步創新智能算法,必將促進武器智能化發展。
猜你喜歡
軍事文摘(2022年19期)2022-10-18 02:41:14
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
印刷工業(2020年4期)2020-10-27 02:45:52
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
中國交通信息化(2017年4期)2017-06-06 07:21:52
