基于雙反射鏡的航空遙感成像系統實時視軸穩定技術研究
2020-12-03 00:55:56洪聲藝王義坤韓貴丞蔡能斌亓洪興
航空兵器 2020年5期
洪聲藝,王義坤,韓貴丞,姚 波,蔡能斌,亓洪興
(1.中國科學院上海技術物理研究所 空間主動光電技術重點實驗室,上海 200083;2.中國科學院大學,北京 100049;3.上海紐鈦測控技術有限公司,上海 201613;4.上海市現場物證重點實驗室,上海 200083)
0 引 言
航空遙感成像在軍事偵察、環境監測、自然災害預報等領域的應用日益廣泛。航空遙感垂直對地成像作業時,作為載體平臺的飛機由于空中氣流和自身發動機等因素的影響難以保持飛行姿態的平穩,造成安裝在載機上的成像系統視軸在慣性空間晃動[1],導致視場偏移[2],增加了地物漏掃風險,降低了飛行作業效率,甚至會導致飛行作業失敗。為了有效隔離載機姿態擾動對垂直對地成像的影響,保證成像系統視軸和視場在慣性空間的穩定,提高飛行作業效率,需要為航空遙感成像系統配置慣性穩定平臺。
慣性穩定平臺通常采用萬向環架結構,安裝在載機與航空遙感成像系統之間[2-9]。當載機產生姿態擾動時,平臺控制系統控制萬向環架帶動成像系統反向實時補償,隔離載機姿態擾動,實現成像系統視軸在慣性空間的穩定。北京航空航天大學和長春光學精密機械與物理研究所的相關學者都對慣性穩定平臺做了大量研究。然而,目前采用萬向環架的視軸穩定技術存在一些不足:慣性穩定平臺與航空遙感成像系統分離,需單獨配置;萬向環架機械結構笨重復雜,轉動慣量大,慣性延遲大,對姿態變化的反應慢,系統帶寬小,控制難度較大。
文獻[10-13]提出了一種實現航空遙感成像系統視軸在慣性空間俯仰方向穩定的新方法。成像載荷水平安裝,在成像載荷前增加一個將光路折轉90°實現垂直對地成像的45°反射鏡。利用速率陀螺實時感測飛機的俯仰角速度ωp,根據平面鏡成像的倍角關系和光路可逆原理,控制45°反射鏡以ωp/2的角速度反向補償,隔離載機俯仰姿態擾動,實現了成像系統視軸在慣性空間俯仰方向的穩定。
受此啟發,考慮在對地成像的45°反射鏡和成像載荷光路之間增設兩個反射鏡:遠離成像載荷的固定反射鏡相對于成像載荷靜止不動,負責光路折轉;靠近成像載荷的穩定反射鏡可以繞平行于載機偏航軸的轉軸轉動,反向補償隔離載機橫滾姿態擾動。從光學成像的角度分析,穩定反射鏡的轉軸經過45°反射鏡折轉后的等效轉軸平行于載機橫滾軸。此方案在原理上能夠實現成像系統視軸在慣性空間橫滾方向的穩定。
與采用萬向環架的傳統視軸穩定技術相比,本文提出的基于雙反射鏡的實時視軸穩定技術,將視軸穩定功能直接復合在航空遙感成像系統中,基于對地成像的45°反射鏡實現視軸在慣性空間俯仰方向的穩定,基于45°反射鏡和成像載荷光路之間的穩定反射鏡實現視軸在慣性空間橫滾方向的穩定,無需額外配置穩定平臺。這一技術的實現,不僅能簡化機載遙感系統,節約成本,而且能減小穩定機構的轉動慣量,大幅降低穩定控制難度。
1 基于成像系統雙反射鏡的實時視軸穩定原理
圖1為復合視軸穩定功能的航空遙感成像系統示意圖,成像系統由成像載荷、45°反射鏡、固定反射鏡和穩定反射鏡組成。位置姿態測量系統(Position and Orientation System,POS)水平安裝在與機體剛性連接的支撐環架上,用于實時感測載機的姿態擾動。對地成像的45°反射鏡可以繞俯仰軸轉動,反向補償隔離俯仰姿態擾動,實現成像系統視軸在慣性空間俯仰方向的實時穩定,45°反射鏡與支撐環架所在平面成45°夾角時定義為其零位。穩定反射鏡可以繞平行于載機偏航軸的橫滾穩定軸轉動,反向補償隔離橫滾姿態擾動,實現成像系統視軸在慣性空間橫滾方向的實時穩定。定義載機機體處于水平狀態,45°反射鏡處于零位且垂直對地成像時,穩定反射鏡的位置為其零位,此時成像系統視軸對應物點為機下點A。

圖1 復合視軸穩定功能的航空遙感成像系統示意圖Fig.1 Airborne remote sensing imaging system including the function of LOS stabilization
1.1 慣性空間俯仰方向的實時視軸穩定原理
慣性空間俯仰方向的實時視軸穩定原理示意如圖2所示。初始時刻,載機機體處于水平狀態,45°反射鏡處于零位,此時成像系統等效視軸為OAOA,對應物點為機下點A。未進行俯仰方向視軸穩定時,45°反射鏡一直保持在零位且相對于成像載荷靜止不動。當載機產生θ角的俯仰姿態擾動時,成像載荷及其等效視軸、45°反射鏡及其零位均繞俯仰軸產生θ角的同步同向轉動,此時成像系統等效視軸變為OBOB,對應物點由機下點A變為點B。顯然,載機俯仰姿態擾動會導致成像系統視軸在慣性空間俯仰方向的晃動。

圖2 慣性空間俯仰方向的實時視軸穩定原理示意圖Fig.2 Principle of real-time LOS stabilization in pitching direction in inertial space
慣性空間俯仰方向的實時視軸穩定原理如下:初始時刻,45°反射鏡處于零位。利用POS實時感測載機俯仰姿態擾動角θ,將等效視軸OBOB的OBO段作為45°反射鏡的反射光線,OB段作為入射光線。根據光路的可逆性原理,控制45°反射鏡繞俯仰軸反向轉動θ/2角。由平面鏡成像的倍角關系可知,入射光線將隨之由OB段反向轉動θ角到OA段,從而保證成像系統等效視軸始終穩定在OBOA,使穩定后的等效視軸對應物點始終為機下點A,實現慣性空間俯仰方向的實時視軸穩定。
1.2 慣性空間橫滾方向的實時視軸穩定原理
初始時刻,載機機體處于水平狀態,穩定反射鏡處于零位,此時成像系統視軸為OAO2O1OA,對應物點為機下點A。未進行橫滾方向視軸穩定時,穩定反射鏡一直保持在零位且相對于成像載荷靜止不動。當載機產生γ角的橫滾姿態擾動時,如圖3所示,成像系統視軸OA段繞橫滾軸產生γ角的同步同向轉動,視軸變為OAO2O1OC,對應物點由機下點A變為點C,顯然,載機橫滾姿態擾動會導致成像系統視軸在慣性空間橫滾方向的晃動。

圖3 載機橫滾姿態擾動對成像系統視軸的影響Fig.3 Influence of roll attitude disturbance to LOS of the imaging system


圖4 慣性空間橫滾方向的實時視軸穩定原理等效示意圖Fig.4 Equivalence principle of real-time LOS stabilization in rolling direction in inertial space
2 基于成像系統雙反射鏡的實時視軸穩定實現
2.1 基于成像系統雙反射鏡的實時視軸穩定實現方案
圖5為實驗室內搭建的載機飛行模擬試驗系統,用來驗證基于成像系統雙反射鏡的實時視軸穩定效果。將航空遙感成像系統放置在六自由度運動平臺上,運動平臺繞其三個軸的轉動用于模擬載機姿態擾動,大反射鏡繞自身鏡面內平行于航空遙感成像系統俯仰軸的轉軸轉動,用于模擬載機飛行并實現室內對外成像,其中鏡面軸向對應翼展方向,成像視場的豎直方向對應載機飛行方向。系統的部分技術指標如表1所示。
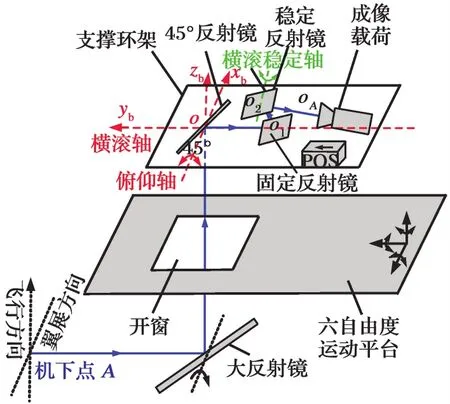
圖5 基于成像系統雙反射鏡的實時視軸穩定室內飛行模擬試驗系統Fig.5 Flight simulator test system to verify real-time LOS stabilization based on dual reflectors in the imaging system in the laboratory

表1 飛行模擬試驗系統部分技術指標Table 1 Part of Technical specifications of the flight simulator test system
本文提出的基于雙反射鏡的航空遙感成像系統實時視軸穩定技術對位置控制要求較高,故采用控制領域經典的位置-速度-電流三環PID控制算法[14],實現實時視軸穩定的精確位置控制,如圖6所示。采用動態響應快、定位精度高的音圈電機[15]帶動45°反射鏡或穩定反射鏡反向轉動補償,實現慣性空間俯仰方向和橫滾方向的實時視軸穩定。

圖6 基于雙反射鏡的實時視軸穩定控制框圖Fig.6 Diagram of real-time LOS stabilization control based on dual reflectors in the imaging system
基于雙反射鏡的航空遙感成像系統實時視軸穩定實現過程為
(1) 上電初始化時,45°反射鏡和穩定反射鏡均處在零位;
(2) 以輸出分辨率為0.001°的POS作為測量基準,實時感測載機的俯仰姿態擾動角θ和橫滾姿態擾動角γ;
(3) 由于45°反射鏡的零位已隨俯仰姿態擾動產生θ角的同步同向轉動,所以,將-θ/2作為音圈電機1的位置環PID命令輸入,控制45°反射鏡繞俯仰軸反向轉動到-θ/2角位置,實現反向轉動θ/2角;
(4) 由于穩定反射鏡的轉軸平行于載機偏航軸,其零位不受橫滾姿態擾動影響。在步驟(3)進行的同時,將-γ/2作為音圈電機2的位置環PID命令輸入,控制穩定反射鏡繞橫滾穩定軸反向轉動到-γ/2角位置,實現反向轉動γ/2角,從而保證成像系統視軸對應物點始終穩定在機下點A,實現航空遙感成像系統視軸在慣性空間俯仰方向和橫滾方向的實時穩定。
2.2 試驗結果與分析
圖7為飛行模擬試驗系統俯仰方向和橫滾方向均產生幅值3°的正弦姿態擾動時的實時視軸穩定控制曲線,從圖7可以看出,實時視軸穩定命令與姿態擾動反相且幅值為姿態擾動角的一半,與位置環PID命令輸入一致。實時視軸穩定命令與實際執行反饋相減得到穩定誤差。由圖7中穩定誤差的放大曲線可得,慣性空間俯仰方向的穩定誤差在±0.006°范圍內變化,橫滾方向的穩定誤差在±0.008°范圍內變化。
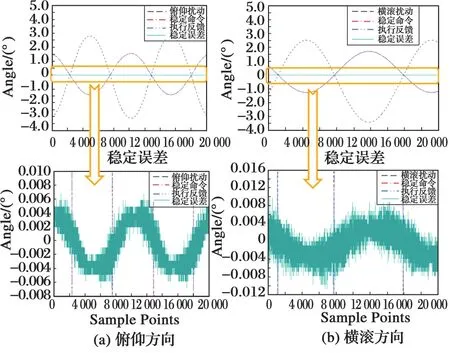
圖7 正弦姿態擾動時的實時視軸穩定控制曲線Fig.7 Real-time LOS stabilization control curve derived from sinusoidal attitude disturbance
由于實時視軸穩定命令的執行對象為45°反射鏡和穩定反射鏡,考慮到平面鏡成像的倍角關系,實時視軸穩定誤差與圖中的穩定誤差存在二倍關系,從而得到慣性空間俯仰方向的實時視軸穩定誤差在±0.012°范圍內變化,橫滾方向的實時視軸穩定誤差在±0.016°范圍內變化。對于視軸穩定來說,選擇穩定誤差的均方根值(RMS)作為穩定精度[3]。由于電機執行命令存在一定的滯后性,圖7中的穩定誤差呈現近似正弦變化,據此選擇誤差峰峰值的1/3作為RMS的近似,最終得到慣性空間俯仰方向的實時視軸穩定精度RMS為0.008°,橫滾方向的實時視軸穩定精度RMS為0.011° 。
圖8給出了飛行模擬試驗系統俯仰方向和橫滾方向均產生幅值3°的正弦姿態擾動時的視軸穩定前后實驗室內對外成像效果對比圖,其中成像視場的水平方向代表翼展方向,豎直向上方向代表飛行方向。視軸穩定前,由于俯仰方向和橫滾方向均產生幅值3°的正弦姿態擾動,導致航空遙感成像系統視軸對應的機下點軌跡及拼接圖像呈現S型,視場發生嚴重偏移。假如按預先設定好的航線在這種狀態下飛行,地物必然漏掃,導致飛行作業失敗。視軸穩定后,航空遙感成像系統視軸對應的機下點軌跡與飛行軌跡能夠較好吻合,視場在慣性空間穩定。飛行模擬試驗表明,基于成像系統雙反射鏡的實時視軸穩定技術可以有效隔離俯仰方向和橫滾方向的姿態擾動,能夠實現航空遙感成像系統視軸在慣性空間俯仰方向和橫滾方向的實時穩定,穩定效果較好。

圖8 飛行模擬試驗系統視軸穩定前后實驗室內對外成像效果對比Fig.8 Outdoor scenery before-and-after LOS stabilization obtained by flight simulator test system in the laboratory
3 結 束 語
本文提出了基于雙反射鏡的航空遙感成像系統實時視軸穩定技術,有效解決了垂直對地成像作業時載機姿態擾動導致成像系統視軸在慣性空間晃動的問題。實驗室內飛行模擬試驗的結果表明,慣性空間俯仰方向的實時視軸穩定精度RMS可達0.008° ,橫滾方向的實時視軸穩定精度RMS可達0.011° 。相比于采用萬向環架結構的傳統視軸穩定技術,基于成像系統雙反射鏡的實時視軸穩定技術由于采用小轉動慣量的光學元件實現,在穩定控制方面更有優勢,而且雙反射鏡的轉動慣量更小,作為穩定功能的執行部件,轉動慣量越小,系統的慣性延遲越小,對姿態變化的反應越快,在系統帶寬的提升上也有較大優勢。將此技術應用于航空遙感成像系統,能夠有效隔離載機俯仰方向和橫滾方向的姿態擾動,保證成像系統視軸和視場在慣性空間的實時穩定,穩定效果明顯。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2022年1期)2022-02-26 06:57:42
計算機應用(2021年4期)2021-04-20 14:06:36
計算機應用(2021年3期)2021-03-18 13:44:48
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
計算機應用(2021年1期)2021-01-21 03:22:38
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
