一種新型領(lǐng)從式多彈協(xié)同制導(dǎo)律設(shè)計
2020-12-03 00:55:10張振林郭正玉呂梅柏韓治國
航空兵器 2020年5期
關(guān)鍵詞:設(shè)計
張振林,張 科*,郭正玉,呂梅柏,王 佩,韓治國
(1.西北工業(yè)大學(xué) 航天學(xué)院,西安 710072;2.中國空空導(dǎo)彈研究院,河南 洛陽 471009)
0 引 言
為提高導(dǎo)彈打擊能力,現(xiàn)有研究主要集中在兩方面:一是提高單枚導(dǎo)彈性能,但付出代價較大;二是利用現(xiàn)有導(dǎo)彈并采用一定策略實現(xiàn)協(xié)同攻擊。多導(dǎo)彈時間協(xié)同策略是指依靠彈間信息交互,多枚導(dǎo)彈在同一時間命中目標(biāo),可以取得較好作戰(zhàn)效果。
目前協(xié)同制導(dǎo)律的設(shè)計主要集中在二維空間。張保峰等人采用變結(jié)構(gòu)控制理論設(shè)計了時間和角度約束的制導(dǎo)律,并且提出一種切換思想,在時間和角度制導(dǎo)律中切換,實現(xiàn)多導(dǎo)彈時間協(xié)同和角度約束[1]。Yao等人基于非線性動力學(xué)系統(tǒng)設(shè)計了一種新的制導(dǎo)律解決尋的導(dǎo)彈的攻擊時間和角度問題。該制導(dǎo)律將TSVM技術(shù)應(yīng)用于終端約束,采用含有兩個未知參數(shù)的TSVM面分別控制時間和角度[2]。Jeon等人在傳統(tǒng)PN制導(dǎo)律的基礎(chǔ)上,增加了一個攻擊時間誤差反饋偏置項,用來控制攻擊時間,該方法被稱為ITCG(Impact-Time-Control-Gui-dance)[3]。Saleem等人針對多彈協(xié)同攻擊同一靜止目標(biāo)提出了一種基于Lyapunov穩(wěn)定性定理的制導(dǎo)律。該制導(dǎo)律根據(jù)初始航向誤差和初始彈目距離,得到了一個封閉形式的剩余時間表達(dá)式,只需控制單個參數(shù)即可實現(xiàn)對攻擊時間的控制[4]。Cho等人針對滑模變結(jié)構(gòu)存在奇異的問題,在制導(dǎo)指令中加入一個正連續(xù)非線性函數(shù),使得李亞普諾夫穩(wěn)定性為負(fù)半定,可以實現(xiàn)不存在測量噪聲情況下對靜止目標(biāo)的協(xié)同攻擊[5]。Arita等人研究了在指定的時間和角度對目標(biāo)進(jìn)行攻擊的最優(yōu)制導(dǎo)律設(shè)計問題,將該制導(dǎo)律歸結(jié)為兩點邊值問題,通過求解兩點邊值確定的狀態(tài)變量和參數(shù)得到最優(yōu)輸入[6]。Kumar等人采用滑模變結(jié)構(gòu)控制理論和非線性接觸動力學(xué)設(shè)計滑模面,成功實現(xiàn)指定時間攻擊的制導(dǎo)律[7]。上述文獻(xiàn)都是二維空間內(nèi)的協(xié)同制導(dǎo)律設(shè)計,雖不能真實反映現(xiàn)實攻擊場景,但對三維多彈協(xié)同制導(dǎo)律設(shè)計提供了研究基礎(chǔ)。
現(xiàn)有的三維時間協(xié)同制導(dǎo)律設(shè)計集中在利用剩余時間進(jìn)行彈間協(xié)調(diào)。宋俊紅等人基于連通無向圖和多智能體有限時間一致性理論等對多導(dǎo)彈時間協(xié)同制導(dǎo)律進(jìn)行設(shè)計;采用滑模變結(jié)構(gòu)控制的方法,成功實現(xiàn)帶角度約束的時間協(xié)同,但需要導(dǎo)彈速度可控[8]。張友根等人采用兩階段控制方法對多導(dǎo)彈時間和角度進(jìn)行控制,第一階段采用時標(biāo)分離的方法設(shè)計出期望的慢子系統(tǒng)和快子系統(tǒng),實現(xiàn)實際彈目距離與期望彈目距離曲線的跟蹤;對角度的跟蹤采用動態(tài)逆的方法,得到兩通道控制指令[9]。馬國欣等人采用領(lǐng)從式策略設(shè)計了時間協(xié)同制導(dǎo)律,領(lǐng)彈的俯仰和偏航通道采用增廣比例導(dǎo)引,從彈采用機(jī)動控制跟蹤領(lǐng)彈的前置角,實現(xiàn)時間協(xié)同[10]。肖增博等人針對無終端約束和有終端約束的情況,提出了一種基于定向自組織原理,根據(jù)所需的動態(tài)性能指標(biāo)求解系統(tǒng)的控制律[11]。Wang針對多彈協(xié)同攻擊同一目標(biāo),采用滑模變結(jié)構(gòu)控制的方法設(shè)計了一種分布式協(xié)同制導(dǎo)律,該制導(dǎo)律利用剩余時間信息調(diào)整對各導(dǎo)彈之間誤差,實現(xiàn)協(xié)同攻擊[12]。文獻(xiàn)[13]針對導(dǎo)彈三維協(xié)同攻擊,提出一種基于網(wǎng)絡(luò)同步原理的制導(dǎo)方法,通過仿真結(jié)果可知,此控制方法十分有效。文獻(xiàn)[14]針對多導(dǎo)彈攻擊大型目標(biāo)這一場景,基于滑模控制方法,提出一種非奇異滑模制導(dǎo)律,并采用虛擬目標(biāo)的設(shè)計思路,設(shè)計了一種適用于機(jī)動目標(biāo)的導(dǎo)彈剩余飛行時間估計方法,能夠?qū)崿F(xiàn)飽和攻擊。Li等人利用模型預(yù)測靜態(tài)規(guī)劃(MPSP)方法設(shè)計了三維時間協(xié)同和角度控制的制導(dǎo)律[15]。三維時間協(xié)同制導(dǎo)律的設(shè)計雖取得了一定成果,但多集中在對導(dǎo)彈速度可控的假設(shè)上,現(xiàn)有的導(dǎo)彈性能還不能達(dá)到這一要求。楊劍影等人針對多彈協(xié)同攻擊高機(jī)動目標(biāo)的情形,從飛行制導(dǎo)、飛行控制制導(dǎo)一體化等方面提出了解決思路[16]。
本文針對導(dǎo)彈速度不可控前提下的多彈協(xié)同攻擊問題進(jìn)行研究,著力降低導(dǎo)彈的協(xié)同時間誤差。
1 多導(dǎo)彈時間協(xié)同三維導(dǎo)引律設(shè)計模型
在建立彈目相對運(yùn)動方程時,考慮多枚導(dǎo)彈攻擊指揮所、機(jī)場等靜止目標(biāo)的情況,建立導(dǎo)彈與目標(biāo)的相對運(yùn)動關(guān)系,如圖1~2所示。
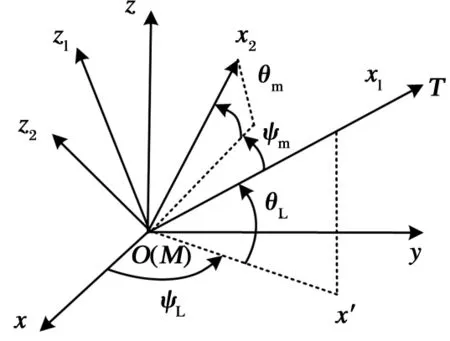
圖1 單枚導(dǎo)彈與目標(biāo)的相對運(yùn)動關(guān)系Fig.1 Relative motion relationship between missile and target

圖2 領(lǐng)彈、第i枚從彈與目標(biāo)的相對運(yùn)動關(guān)系Fig.2 The relative motion relationship between the leader, the ith follower and the target
圖中,Oxyz為參考坐標(biāo)系;Oxlylzl為彈目視線坐標(biāo)系;Ox2y2z2為彈道坐標(biāo)系;ψL和θL為由參考坐標(biāo)系Oxyz到視線坐標(biāo)系Oxlylzl轉(zhuǎn)換(第一次繞z軸旋轉(zhuǎn),第二次繞yl軸旋轉(zhuǎn))對應(yīng)的歐拉角,即彈目視線矢量相對慣性坐標(biāo)系的方位角和高低角;ψm和θm為由視線坐標(biāo)系Oxlylzl到導(dǎo)彈的彈道坐標(biāo)系Ox2y2z2轉(zhuǎn)換對應(yīng)的歐拉角,即導(dǎo)彈速度矢量相對視線坐標(biāo)系的方位角和高低角。

基于以上假設(shè)條件,推導(dǎo)三維空間中的導(dǎo)彈和目標(biāo)相對運(yùn)動關(guān)系模型。根據(jù)哥式定理可得如下關(guān)系式:
(1)

(2)
將式(2)代入式(1),并在視線坐標(biāo)系下展開整理得:

(3)

由假設(shè)可知本文的加速度與速度方向垂直,可以通過角速度矢量與線速度矢量進(jìn)行叉乘運(yùn)算得到加速度表達(dá)式如下:
Am=ωVm×Vm=(ωLL+ωm)×Vm
(4)

(5)
將ωLL和ωm的代入式(4)中,得
(6)
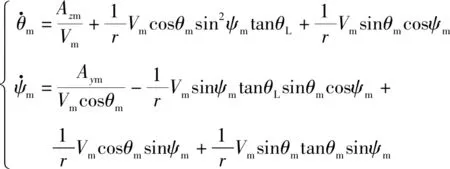
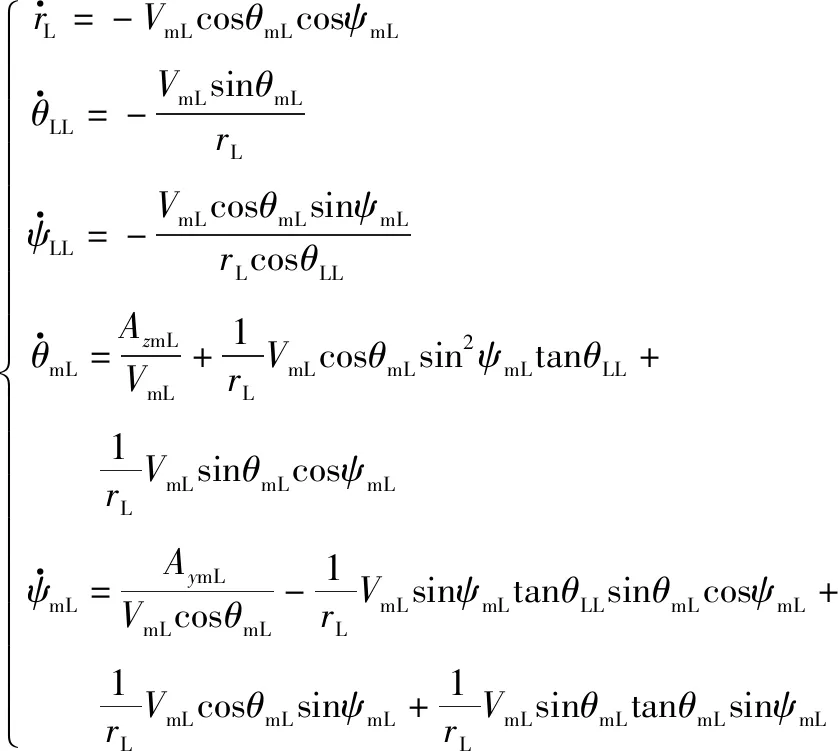
結(jié)合式(4)和式(6),得到領(lǐng)彈和第i枚從彈的彈目相對運(yùn)動方程如下:
(7)

(8)
2 多導(dǎo)彈時間協(xié)同三維導(dǎo)引律設(shè)計
本文采用領(lǐng)從式策略實現(xiàn)多彈攻擊時間協(xié)同。考慮到導(dǎo)彈的剩余彈目距離隨著時間的變化逐漸趨于零,故將對攻擊時間的控制轉(zhuǎn)化為對彈目距離變化的跟蹤控制,即從彈剩余彈目距離在有限時間內(nèi)跟蹤上領(lǐng)彈剩余彈目距離,可實現(xiàn)多彈在領(lǐng)彈彈目距離為零時擊中目標(biāo)。彈目距離跟蹤趨近示意圖如圖3所示。

圖3 彈目距離跟蹤趨近示意圖Fig.3 Schematic diagram of the distance between missile and target tracking approach
本文領(lǐng)彈采用增廣比例導(dǎo)引律,從彈利用二階非線性系統(tǒng)對制導(dǎo)律進(jìn)行設(shè)計,實現(xiàn)領(lǐng)彈和從彈的時間協(xié)同。
(1) 領(lǐng)彈制導(dǎo)律設(shè)計[11]
(9)

(10)
式中:kL1和kL2均為增廣比例導(dǎo)引系數(shù)。
(2) 第i枚從彈制導(dǎo)律設(shè)計
考慮一類二階非線性系統(tǒng):
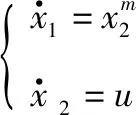
(11)
式中:m為正奇數(shù)。
引理1:下列形式的反饋控制器可以令式(11)所示的系統(tǒng)在有限時間內(nèi)趨于穩(wěn)定[17-18]:

(12)
式中:k1,k2>0;0<α<1/m;β=(m+1)α/(1+α)。
將從彈剩余彈目距離與領(lǐng)彈剩余彈目距離的偏差視為控制狀態(tài)變量,設(shè)計輔助狀態(tài)變量如下:

(13)
式中:ri為第i枚從彈的剩余彈目距離;rL為領(lǐng)彈的剩余彈目距離,此時的rL看作常值。結(jié)合彈目運(yùn)動關(guān)系式(8),可得輔助狀態(tài)方程:

(14)
為使?fàn)顟B(tài)方程符合式(11)的形式,將式(14)進(jìn)行反饋線性化,得
(15)
式中:p1+p2=1。將式(15)帶入式(14),可以得到線性化的輔助狀態(tài)方程形式:

(16)
式中:m=1為奇數(shù)。參考引理1,令

(17)
式中:k1,k2>0;0<α<1;β=2α/(1+α)。


(18)


(19)
式(19)是整個控制律的前提條件。結(jié)合式(18)~(19),整理并化簡,分情況討論奇異下的從彈制導(dǎo)律形式:
(1) 當(dāng)θmi=0且ψmi=0時

(20)
(2) 當(dāng)θmi=0且ψmi≠0時
(21)
(3) 當(dāng)θmi≠0且ψmi=0時
(22)
(4) 當(dāng)θmi≠0且ψmi≠0時

(23)
式中:ε=10-6;z1和z2的取值參考式(13)。
3 仿真分析
針對多導(dǎo)彈齊射攻擊指揮所、機(jī)場等靜止目標(biāo)時的場景,假設(shè)有3枚導(dǎo)彈,速度均保持恒定,其他信息如表1所示。待攻擊目標(biāo)在(0,0,0)點且靜止,期望在同一時刻3枚導(dǎo)彈擊中目標(biāo)。值得注意的是,表中的速度高低角和方位角分別表示速度矢量相對于視線坐標(biāo)系的高低角和方位角;視線高低角和視線方位角表示彈目視線的高低角和方位角。與現(xiàn)有領(lǐng)從式[10]的仿真結(jié)果進(jìn)行對比,兩種領(lǐng)從式仿真的初始條件一致,增廣比例導(dǎo)引系數(shù)一致。針對表 1 所示的3枚導(dǎo)彈,領(lǐng)彈增廣比例導(dǎo)引系數(shù)如下:kL1=2,kL2=-5;從彈模型參數(shù)如下:k1=20,k2=20,α=0.6,β=0.75,ε=10-6,p1=0.45,p2=0.55,導(dǎo)彈加速度最大幅值為AM=5g。利用式(19)~(23)所示的控制律形式仿真結(jié)果如圖4~10所示。

圖4 三維彈道軌跡Fig.4 Three dimensional trajectory

表1 導(dǎo)彈參數(shù)信息Table 1 Missile parameter information
由圖5可知,本制導(dǎo)律下兩枚從彈在6 s左右跟蹤上領(lǐng)彈的剩余彈目距離,而且和領(lǐng)彈的剩余彈目距離在同一時刻趨于零值,實現(xiàn)多枚導(dǎo)彈的時間協(xié)同,擊中時刻3枚導(dǎo)彈的時間誤差很小。圖6中的從彈跟蹤上領(lǐng)彈的剩 余彈目距離時間約在13 s左右,且在擊中時刻存在一定的協(xié)同時間誤差。將圖5和圖6對比可知,本文方法的協(xié)同精度較高。由圖7~8可知,導(dǎo)彈在攻擊過程中,導(dǎo)彈速度逐漸指向目標(biāo),即速度在視線坐標(biāo)系中的傾角和偏角逐漸趨于零,符合導(dǎo)彈實際攻擊目標(biāo)時的情況。由圖9~10可知,在整個飛行過程中,時間協(xié)同主要是靠偏航通道加速度來調(diào)節(jié),所以幅值相較于俯仰通道較大。
圖8 速度方位角變化曲線Fig.8 Velocityazimuthchangecurve圖9 偏航通道加速度曲線Fig.9 Pitchchannelaccelerationcurve圖10 俯仰通道加速度曲線Fig.10 Yawchannelaccelerationcurve
表2中Leader-Follower代表本文制導(dǎo)律的仿真結(jié)果,leader-follower是現(xiàn)有領(lǐng)從式的仿真結(jié)果,兩種制導(dǎo)律結(jié)果進(jìn)行對比,可以發(fā)現(xiàn)本文設(shè)計的制導(dǎo)律在脫靶量和協(xié)同時間差上都要優(yōu)于現(xiàn)有的領(lǐng)從式制導(dǎo)律。

表2 仿真結(jié)果Table 2 Simulation result
4 結(jié) 論
本文針對現(xiàn)有協(xié)同攻擊存在一定的協(xié)同時間誤差的問題,設(shè)計了一種新型制導(dǎo)律。與現(xiàn)有領(lǐng)從式制導(dǎo)律最大的不同是,本文將對攻擊時間的控制轉(zhuǎn)化為對剩余彈目距離跟蹤的控制,不需要進(jìn)行剩余時間估計,協(xié)同精度更高。針對指揮所、機(jī)場等靜止目標(biāo),假設(shè)導(dǎo)彈速度恒定,領(lǐng)彈采用增廣比例導(dǎo)引,從彈采用二階非線性系統(tǒng)的有限時間收斂特性設(shè)計控制量,其后對獲得的控制量進(jìn)行解耦設(shè)計,分別得到俯仰通道和偏航通道的控制量,采用本文的制導(dǎo)律進(jìn)行仿真,驗證了該制導(dǎo)律的有效性和可行性。
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04
