基于LabVIEW和NI myRIO的移動機器人系統設計
2020-12-23 05:43:30陳小寧
中國教育技術裝備 2020年13期
關鍵詞:移動機器人
陳小寧

摘? 要 依托世界移動機器人技能大賽背景需求,采用中德棟梁移動機器人平臺,基于LabVIEW和NI myRIO進行移動機器人控制系統的設計,借助直流電機、伺服舵機及傳感器等,實現移動機器人的基本運動、智能距離檢測及路徑自主循跡等功能。實驗結果表明,該系統能較好地完成移動機器人的基本運動以及智能距離檢測的路徑自主循跡功能。此外,該系統還設計了完善的用戶操作界面,且具有高效靈活、可擴展性強和較好的兼容性等特點,對探究智能移動機器人的發展方向具有重要意義。
關鍵詞 LabVIEW;NI myRIO;移動機器人;控制系統
中圖分類號:TP242? ? 文獻標識碼:B
文章編號:1671-489X(2020)13-0027-03
1 引言
移動機器人是機器人領域的重要組成部分,目前廣泛應用于工業生產并在社會服務方面發揮重要作用。我國的移動機器人產業起步晚,但是隨著智能制造的發展浪潮以及“中國制造2025”的提出,移動機器人技術將會迎來新的發展階段 [1]。
該設計以“第44屆世界技能大賽移動機器人項目”為背景,采用中德棟梁移動機器人平臺,該平臺模塊資源豐富,底層配置模塊完善,更有利于聚焦移動機器人的功能設
計[2]。該比賽中的走廊區為移動機器人自主路徑循跡區,機器人從起點位置出發,自主循跡通過走廊,沿途不能碰到走廊墻壁;通過走廊區后進入下一個比賽區,完成后面的任務后,還要再回來自動循跡通過走廊區以返回到起點。基于以上控制要求,本文設計一種基于LabVIEW和NI myRIO的路徑規劃及循跡的移動機器人控制系統。
2 控制系統結構
該智能距離檢測循跡的輪式機器人是基于NI myRIO設計的,能夠借助智能距離檢測實現對預設方向路徑的自主循跡。其中,NI myRIO實物和移動機器人實物如圖1所示。
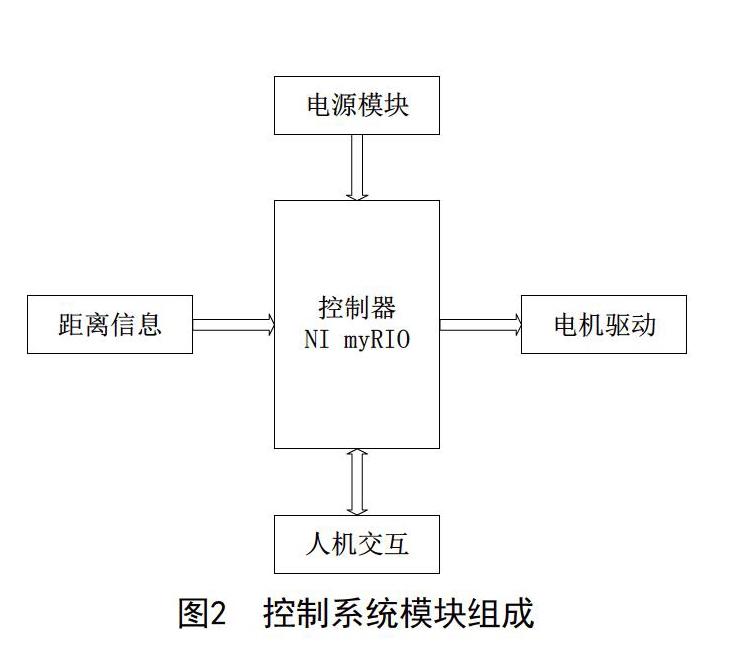
移動機器人硬件由控制器、驅動電路、多種傳感器及電源模塊等組成。其中,NI myRIO控制器作為核心處理器,負責采集所有傳感器的數據并進行處理,完成各個模塊間的通信連接并進行控制等[3]。傳感器主要通過超聲波來檢測與前方墻體的距離,并將數據實時發送給控制器。驅動電路負責控制四個輪上電機的啟動、停止和正反轉,從而實現對移動機器人的前進、后退和差速轉向控制。該系統配備一個12 V的可充電電池,為各個電路模塊提供電能。軟件方面,該系統使用LabVIEW進行軟件架構設計以及控制程序的編寫,NI myRIO將處理后的相關數據發送給上位機,并在LabVIEW界面上進行實時顯示。該移動機器人會根據預設功能邏輯在遇到墻體后實現自動停車、自動轉向、自動前進,從而實現自主循跡。其中,本控制系統的模塊組成如圖2所示。
3 控制系統的電路設計
NI myRIO控制模塊? NI myRIO作為移動機器人的大腦,完成了實時距離數據的檢測采集、數據處理與算法邏輯、電機和舵機的驅動控制以及模塊間的交互通信等功能。Xilinx FPGA的I/O可實現隨意的定制化功能,以更好地滿足系統需求;Xilinx FPGA采用的并行運算及數據處理方
式,更是滿足了移動機器人對數據實時性、可靠性的需求。ARM Cortex A9 MCU具有強大的運算能力,更是滿足了移動機器人對數據處理復雜度的需求。
距離檢測模塊? 本設計使用MaxBotix MB1010超聲波模塊進行距離檢測,其測量距離范圍為2~400 cm,測量角度為15°。檢測的工作原理:控制器的DIO1端口輸出一個脈沖信號,觸發聲波信號發射,當信號碰到障礙物后會產生一個反射信號,通過測量超聲波發射信號和反射信號的時間差,將測量差乘以空氣的聲速,就可計算出前方障礙物的距離。該超聲波模塊由發射電路、接收電路以及控制電路組成。
電機驅動模塊? 該系統通過NI myRIO控制器上的A端口產生控制信號,經L298N進行驅動功率放大后,以驅動直流電機的旋轉,完成移動機器人的基本移動。
4 控制系統的軟件設計
本系統軟件部分借助LabVIEW進行設計,采用模塊化設計進行軟件架構,各主要模塊的設計思路如下。
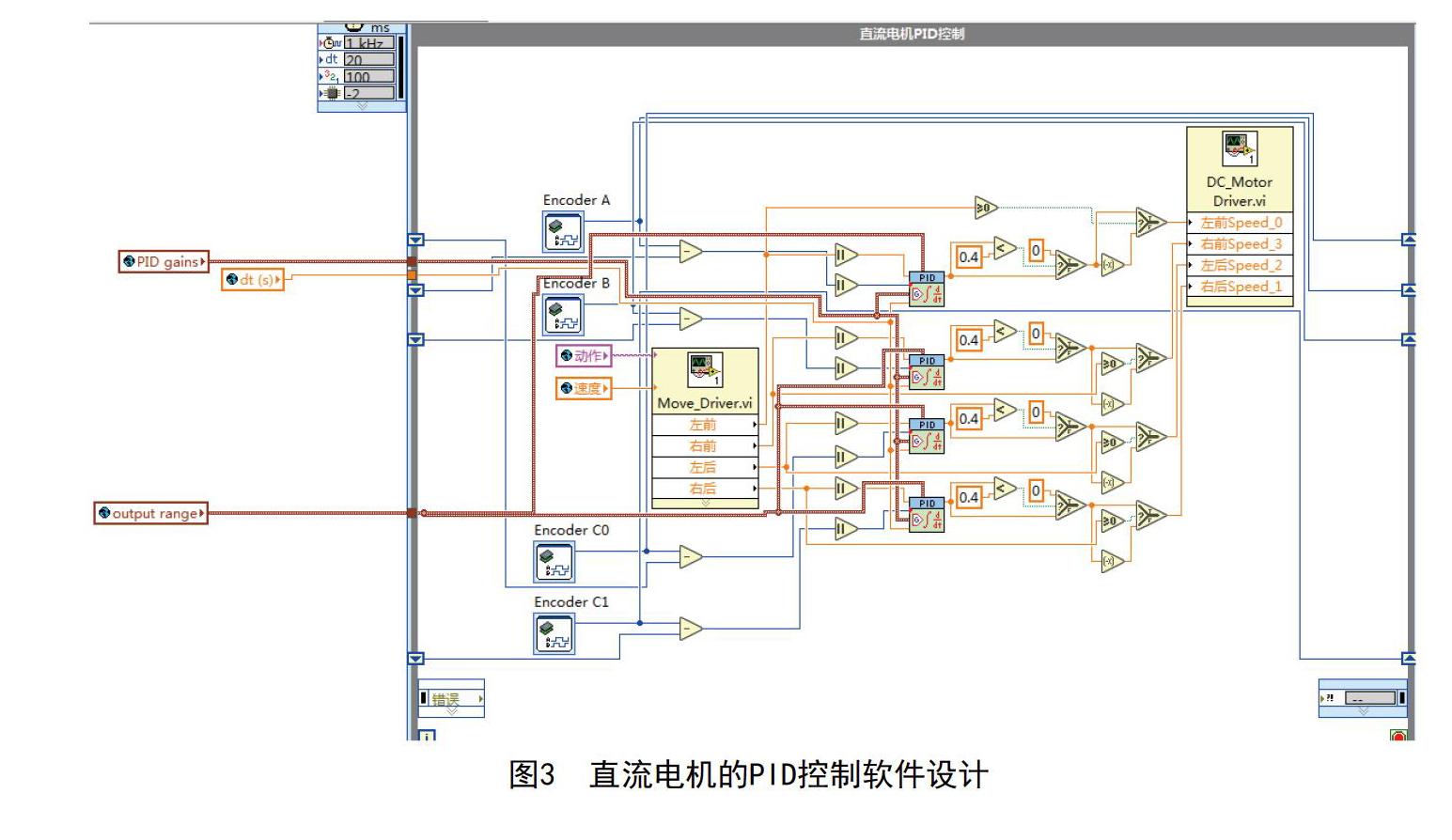
驅動模塊軟件設計? NI myRIO通過對四個直流電機的速度及方向的協同控制,可以實現移動機器人在工作環境中的前進、后退、左轉、右轉及原地旋轉的全向移動,使其按照期望路線行走。因此,電機的速度控制是該模塊非常重要的一部分。
該系統設計中建立了直流電機的速度閉環調節系統,通過編碼器反饋的脈沖數計算電機的反饋速度,使用PID調節器控制電機恒速運行。通過調節PI參數,電機可以快速達到目標速度并且穩定地運行。帶PID調節的直流電機調速的軟件設計如圖3所示。
距離檢測模塊? 距離檢測功能是移動機器人運行控制以及自主循跡非常重要的一個模塊。該模塊由多個子程序組成,將檢測的相關數據實時發送給控制系統。
在主程序設計時,首先必須對超聲波傳感器的參數、前方墻體距離檢測算法的參數、Wi-Fi與上位機之間的通信等進行初始化設置,使各個功能模塊都進入正常工作狀態,為后續的一系列數據檢測及算法邏輯做準備。智能距離檢測功能中,超聲波脈沖觸發信號的產生通過調用while() 循環程序持續產生。當碰到障礙時,接收端會接收到反射信號。計數器記錄所用時間,待到高電平結束時,通過公式計算距離:
L=[聲速(340 m/s)×T]/2
計算所得距離將對比預設安全距離,當大于安全距離時前進,如圖4a所示;當小于安全距離時停止,然后按預設方向順序進行轉向,如圖4b所示。轉向完成之后,繼續向前移動,如此循環往復,直到機器人到達終點。同時,控制器會通過Wi-Fi通信,實時將與前方墻體的實測距離數據發送給PC端上位機進行顯示,方便用戶監控調試。該模塊的軟件設計如圖4所示。
PC端的操作? 為方便用戶的使用操作以及增加可移植復用性,該系統還設計了完善的用戶界面。該項目所設計的PC端上位機通過Wi-Fi與NI myRIO控制器之間進行實時通信數據傳輸,實現對機器人各功能模塊關鍵參數的監測和最直觀的觀察。還可以通過該上位機界面上的啟停鍵、轉向鍵對移動機器人的移動進行控制。此外,該移動機器人還可通過Wi-Fi實現圖像傳輸的功能,為其廣泛應用提供堅實的平臺基礎。該PC端上位機操作界面如圖5所示。
5 結論
本文以NI myRIO控制器為核心平臺,使用LabVIEW開發環境,設計制作了一種自主循跡的移動機器人控制系統。該設計以世界技能大賽移動機器人項目作為應用背景,對該系統的可行性、穩定性進行了充分驗證。實驗證明,該系統能夠很好地完成移動機器人的基本移動和距離檢測。
本項目成功地將myRIO強大的數據處理能力與LabVIEW 圖形化編程的優勢完美結合,涉及多種先進的專業技術,包括自動控制原理、無線Wi-Fi通信、視頻采集、圖像傳輸、傳感器技術等。該機器人控制系統具有高可靠性、高實時性以及可擴展性優越等特點,不僅實現了智能控制、自主避障循跡、人機交互等基本功能,還可進行圖像處理及傳輸,搭載的NI myRIO控制器大大提高了該控制系統的運算能力,為移動機器人的發展提供了一個新的參考方向。■
參考文獻
[1]蔡卓凡.基于多超聲波傳感器避障機器人小車的設計[J].自動化技術與應用,2014(5):85-89.
[2]陳威,陳靜.基于多傳感器的智能小車避障控制系統設計[J].工業控制計算機,2018(7):41-42.
[3]董存輝,擺玉龍,柴乾隆.基于模糊控制的自主尋跡機器人設計[J].電子技術應用,2012(5):139-141.
猜你喜歡
北京航空航天大學學報(2022年6期)2022-07-02 01:59:12
四川輕化工大學學報(自然科學版)(2021年3期)2021-08-30 06:37:02
中國慣性技術學報(2019年3期)2019-10-15 07:21:02
電子測試(2018年15期)2018-09-26 06:01:34
制造技術與機床(2017年3期)2017-06-23 08:11:21
智能系統學報(2015年4期)2015-12-27 09:38:35
機電產品開發與創新(2014年5期)2014-03-11 16:42:32
鄭州大學學報(理學版)(2014年3期)2014-03-01 04:21:09
中國海洋大學學報(自然科學版)(2014年8期)2014-02-28 12:21:31
中國海洋大學學報(自然科學版)(2014年7期)2014-02-28 12:21:19