單信息條件引導下的光學設備搜索策略研究與實現
2021-01-15 02:04:56孟凡勝黃龍呈徐慧娟
軍民兩用技術與產品 2020年12期
孟凡勝 周 磊 黃龍呈 徐慧娟
(中國人民解放軍63620部隊,酒泉735000)
1 前 言
所謂引導,就是以模擬量的方式為飛行器提供引導信息并進行目標捕獲的過程。對于飛行器的測量任務來說,測控設備的引導信息通常分為中心引導、程序引導和同站互引導等。這些引導信息中一般含有目標的方位A、俯仰E及徑向距離R 等,能夠將測控設備引導至某一明確的小型空域,以滿足引導測控設備快速搜索捕獲目標的需求。
但在實際任務中,測控設備所獲取的引導信息并不完全包含以上信息,如只有方位A 和徑向距離R,目標引導空域范圍較大,并不足以支持測控設備快速準確搜索及捕獲目標的需求。為區分不同類型的引導信息,通常將含有方位A 和俯仰E 的引導信息稱為完全信息條件引導;將只有方位A(含徑向距離R)或俯仰E(含徑向距離R)的引導信息稱為單信息條件引導。
在一次任務行動中,某型光測設備就面臨了單信息條件引導的情況,即引導信息只有雷達的方位A 和徑向距離R 可以利用,難以對測控設備形成有效的引導信息,所以必須建立新的引導模型,才能夠對目標進行有效的搜索和引導。
新的引導模型構想是在收到單信息條件引導信息的方位A 和徑向距離R 后,根據當地的地理情況和設備參數,給定預定目標的初始俯仰E,并根據設備的精度設置搜索步長;同時,設備保持隨方位A 轉動,在一定俯仰范圍內進行類似“之”字形掃描,掃描過程中一旦捕獲目標,就可以開展正常跟蹤測量。
本文基于目標運動特點,結合單信息條件引導信息的方位A 和徑向距離R,開發了航跡預測軟件和搜索引導軟件,實測結果驗證了軟件的可靠性和實效性。隨著后續任務的多樣化發展趨勢,單臺設備執行任務的情況會逐年增多,及時研究各種情況下的引導搜索模式和方法,對于提高單臺設備的跟蹤能力,有著非常重要的實際意義。
2 目標特性分析
在目標識別跟蹤系統中,目標特性包括目標回波信號特征、光譜成像特征、姿態與運動特征、特征選擇與融合等,是實現目標探測與識別的重要基礎。對于有引導信息條件下的光學設備搜索捕獲來說,目標的成像大小和運動特征是與搜索捕獲密切相關的目標特性。
2.1 成像大小
一般來說,根據目標大小、目標距離和設備參數,可以計算出目標的成像大小。
2.1.1 識別條件
許多研究表明,在不考慮目標本質和圖像缺陷的情況下,用目標等效條紋的分辨力來確定紅外熱像儀成像系統對目標的識別能力,這就是約翰遜準則。根據約翰遜準則,將視覺識別分為3 個層次:探測,識別和鑒別。當判斷概率為50%時,目標成像在探測器上所占探測器的像元數情況如表1 所示。
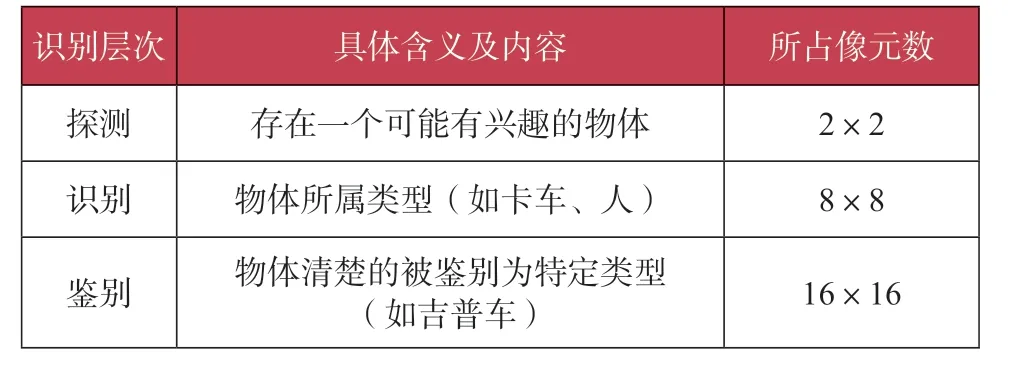
表1 依據約翰遜準則的識別層次與像元數關系表
因此,在實際跟蹤中一般認為,大于1~2 個像元能夠成像,大于4 個像元能夠探測目標。
2.1.2 成像大小估算方法
成像大小估算需要的設備參數包括焦距f、像元數N、像元尺寸d、視場角FOV;目標的環境參數包括目標的大小尺寸、作用距離范圍、目標在空中的飛行速度等。
設備空間識別率可采用瞬時視場角(IFOV)表示,是指傳感器內單個探測元件的受光角度或觀測視野的大小,又稱為傳感器的角分辨率。
對于探測設備來說,IFOV為設備視場角與其選用的電荷耦合器件(CCD)像元數的比值。例如,某設備選用CCD的像元數為1024×768、視場角為1.24°×0.93°時,其空間識別率,即IFOV為:

目標成像大小與IFOV密切相關,像元數的個數為:

式中,[m,n]為像元數的個數;[L,W]為目標的長寬尺寸;d 為目標距離。
假設目標截面為約1m2的正方形,在15~100km的測量距離內,像元數的個數計算結果如表2 所示。
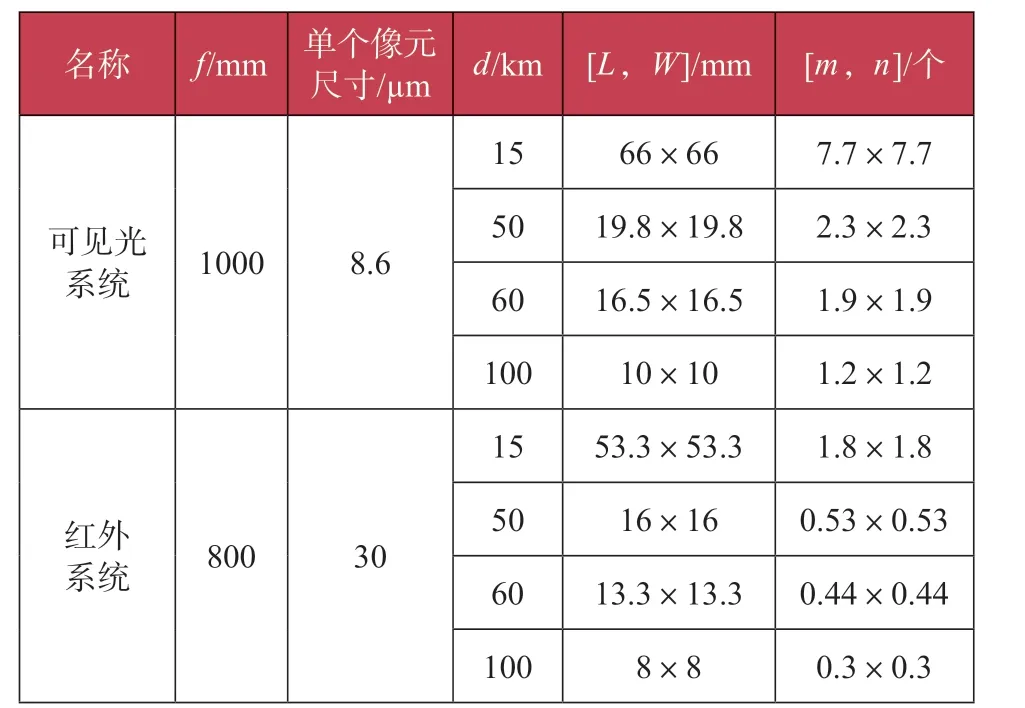
表2 光學系統對不同距離上目標的成像大小計算結果
綜合參考計算結果,以及可見光、紅外系統的實際成像能力,可見光系統在60km 處對目標的成像大小為1.9mm×1.9mm,近似可探測,因此可認為設備能夠對約60km 范圍內的此類目標進行跟蹤測量。
2.2 目標穿過視場時間
目標運動特征對搜索捕獲最大的影響因素是目標穿過視場時間,其與設備視場范圍、目標橫向速度分量和目標距離相關。
例如,當可見光方位和高低視場范圍為20′×16′、紅外視場方位和高低視場范圍為40′×30′時,在下列不同目標距離對應的空域范圍,飛行橫向速度按60km/h(目標預計速度為16.67m/s)計算,可以根據目標的速度制定搜索策略,確定目標的可能運動范圍,有效搜索并鎖定目標。搜索飛出視場的時間(全視場)如表3所示。
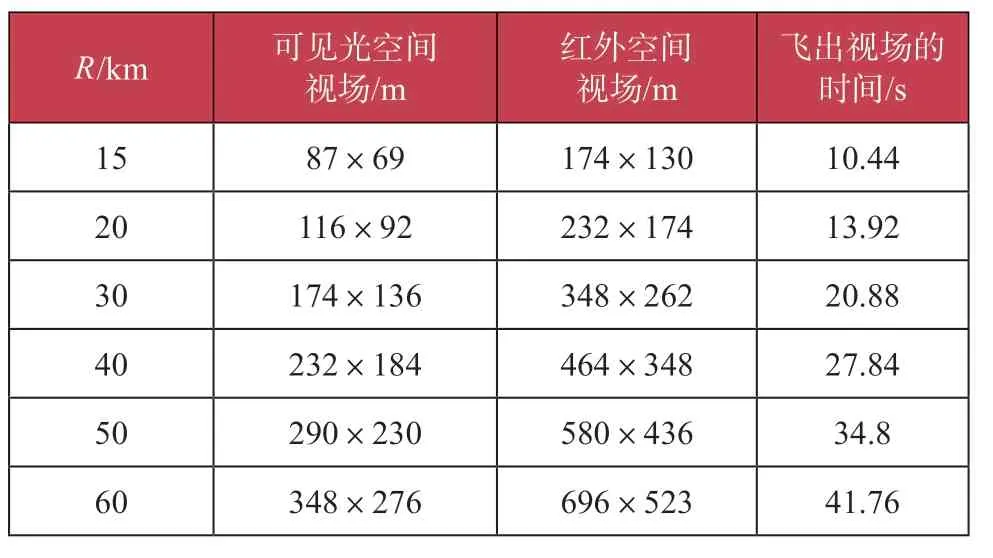
表3 不同距離上目標穿越視場時間計算
3 引導掃描速度計算
紅外系統拍攝頻率不同,對應不同的掃描時間。例如,50 幀/s、100 幀/s 兩種頻率對應的每幀時間為20ms、10ms。一般來說,設備的高低方向像元數為256 個,按照至少4 個像素作為判斷目標的標準,可按每幀移動4 個像元的速度進行搜索。此外,引導掃描速度還必須滿足完成一個搜索周期的時間不大于目標飛出視場的時間要求。
假設跟蹤的目標高度在3~6km范圍內,考慮低仰角的地物遮擋,掃描高度范圍可選取2~10km,則對應于不同的距離,視場大小如表3所示。按照以上原則進行掃描搜索,采用50幀/s的幀頻進行圖像記錄,按照30′/s的搜索速度,從低到高掃描8km的俯仰范圍需要的時間如表4所示。從計算結果看,設置合適的搜索步長能夠滿足“一個搜索周期的時間不大于目標飛出視場的時間”的要求。
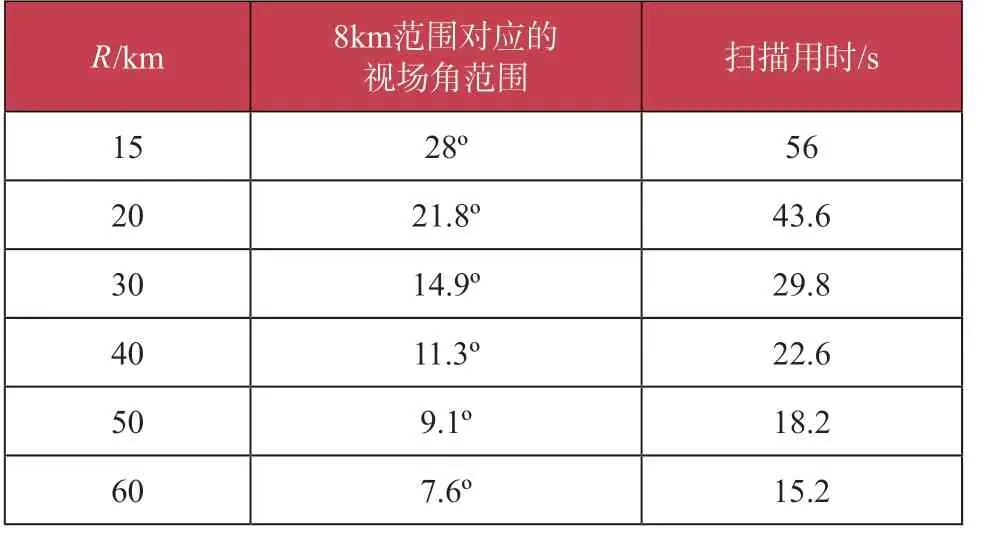
表4 8km掃描高度范圍對應的視場角范圍和掃描時間
4 掃描方式描述
假設收到的雷達信息第一幀為A、R,則可以根據表4 數據選取參數,序列數據可以表述為(A,1°),(A,2°),…,(A,Emax)。
如果在這一周列中沒有捕獲到目標,根據風速、風向和雷達的下一幀數據,將A1=A+δA,序列數據可以表述為(A+δA,Emax),…,(A+δA,2°),(A+δA,1°),δA 是下一個采樣點與上一個采樣點的差。
同理,也可以采取高低角不變,方位角變化的方式進行搜索。按照方位角不變,俯仰角變化,設備掃描形成的軌跡如圖1 所示。
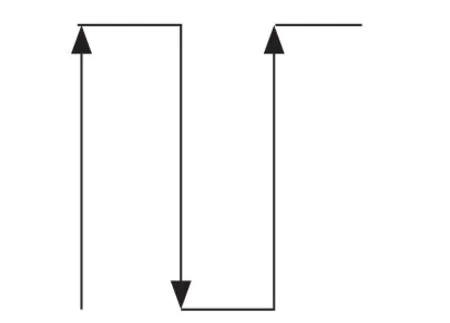
圖1 設備掃描形成的軌跡
5 效果分析
根據以上數學模型,研究人員開發了航跡預測搜索軟件和程序搜索軟件,優化引導儀搜索目標策略,進一步完善了搜索方案。通過實際驗證,搜索方案科學合理,搜索自動化程度大大提高。
5.1 目標航跡預測
根據目標運動高度、速度和航向較穩定的特征,研究人員研發了目標航跡預測搜索軟件,如圖2 所示。該軟件可以依據設備站址和目標位置信息,預測生成目標理論彈道。其中,目標位置的經緯度信息可以從指揮中心綜合態勢席位獲取,或者通過其它設備的方位信息和預估高度信息結合設備本身站址解算。
理論彈道的準確性主要受目標運動的穩定性和獲取目標位置的準確性影響,通過跟蹤多批次俯仰角為3°、飛行狀態較穩定的民航飛機,充分驗證了航跡預測搜索軟件的有效性和可靠性。
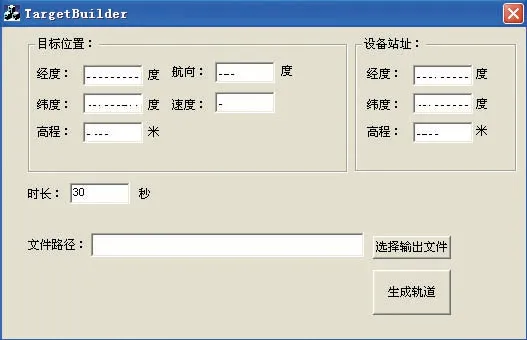
圖2 目標航跡預測軟件界面
5.2 程序引導搜索
基于目標運動方位角速度和俯仰角速度較小的條件,開發并優化了搜索軟件,如圖3所示,該軟件具有按方位角搜索或按俯仰角搜索的2種搜索方式。方位角搜索范圍主要依據同站某雷達提供的方位信息,一般不超過5°;俯仰角搜索范圍主要參考某雷達提供的距離和高度估算,較準確的俯仰值由目標航跡預測搜索軟件計算獲得,一般為1°~5°。搜索間距值的設置主要參考紅外相機視場、搜索路徑選擇和目標運動速度。搜索速度的設置主要參考目標方位角速度的變化情況,以及操作手發現目標后實施單桿引導跟蹤的熟練程度和反應能力。
在測試跟蹤民航飛機過程中,光學設備均能準確的根據同站某型雷達的指示信息捕獲目標,充分驗證了搜索掃描軟件的可靠性和穩定性。

圖3 搜索掃描軟件參數設置界面
5.3 典型跟蹤情況分析
根據同站某雷達通報的方位距離信息,光學設備迅速捕獲目標,距離28km,保持穩定跟蹤約35min,距離約60km。兩套設備跟蹤目標的方位角度變化如圖4所示,最大方位角度差為3.8°,最小方位角度差為0.1°。通過對比,采用我們設計的搜索策略,光學設備可以快速鎖定并穩定跟蹤目標,跟蹤精度得到有效提升。
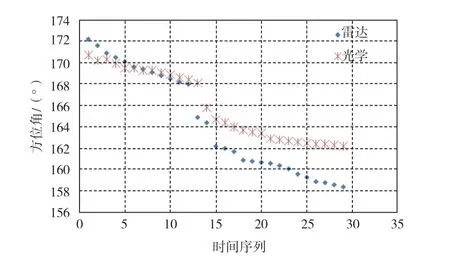
圖4 光學設備跟蹤方位與某型雷達通報方位比較
6 結束語
本文通過預設的航跡預測和搜索軟件,實現了單信息條件引導下的目標搜索引導功能,對于發現目標和跟蹤記錄具有非常重要的意義。根據目標的實際情況和信息提供情況,能夠及時進行模型修正,使探測設備更好地適應單信息條件引導下的工作模式。
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
經濟技術協作信息(2018年22期)2019-01-19 03:00:18
電子制作(2018年11期)2018-08-04 03:26:08
中華手工(2017年2期)2017-06-06 23:00:31
工業設計(2016年12期)2016-04-16 02:52:00
設備管理與維修(2015年12期)2015-04-09 06:57:00
中外會展(2014年4期)2014-11-27 07:46:46
消費者報道(2014年7期)2014-07-31 11:23:57
建筑創作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32