高精度測速算法實現于二次雷達系統研究
2021-01-15 02:04:56熊朝廷
軍民兩用技術與產品 2020年12期
熊朝廷 黎 亮
(四川九洲電器集團有限責任公司,綿陽 621000)
1 雷達的分類及其原理簡介
雷達一詞為無線電檢測與測距(Radio Detection and Ranging)的縮寫,雷達從技術體制上大至可以分為兩類:一次雷達和二次雷達。
一次雷達通過射頻天線向空中發射周期性高功率射頻電磁脈沖,如果該電磁脈沖遇到了障礙物則其部分能量會被反射回發射端。不同類型障礙物的反射信號具有不同的特征,發射端通過檢測自身發射脈沖回波的方式就能探測確定空中目標。
二次雷達的工作原理為機載應答裝置,協助詢問端完成對目標的探測確認工作。二次雷達和一次雷達的根本區別在于探測原理的不同。一次雷達依靠目標對雷達發射的電磁波的反射作用工作,它可以主動發現目標并且定位:二次雷達則是在地面站和目標應答器的配合下,采用問答的方式進行工作,它必須經過2 次有源輻射電磁波信號(詢問與應答各1 次)才能完成應有的功能。
目前,世界上典型的二次雷達系統為用于民航交通管制的空管雷達系統,該系統兼顧軍民兩用性能,其采用相同的工作頻段與不同的模式來區分軍用及民用目標;軍用模式服務于北約組織國家,民用模式服務于全球空中交通管制。該系統最基本的功能為目標身份確定、測距和測向,其測距和測向的方法與一次雷達采用的方法相同,但不具備測速的能力。例如,最新的M5 軍用模式二次雷達系統,也僅僅通過數據共享的方式新增了一種定位技術,但仍然不具備主動測速的能力。為此,本文從二次雷達系統技術體制的角度出發,分析二次雷達系統實現高精度測速的可能性,并給出相應的數學模型和仿真分析,以期能為二次雷達系統的技術體制和工程應用發展提供新的思路。
2 條件分析
2.1 條件
二次雷達系統一般由詢問端和應答端兩部分組成,且雷達信號的上下行收發頻率不同。以目前最常用的二次雷達系統空中交通管制系統為例,應答端為空管應答機,安裝于民航飛機上,由上、下應答天線和主機組成;詢問端為空管詢問機,安裝于各大機場,由詢問天線和主機組成。該系統的基本工作條件如下:(1)信號收發頻率不同(上行fI0,下行fT0);(2)詢問端和應答端設備本振信號不同源即不相參(頻差不確定);(3)詢問端和應答端的收發頻率各自相參。
2.2 相參實現
一次雷達通過測定回波多普勒頻偏的方式來實現對目標的測速。參考一次雷達慢時間積累處理原理(簡稱慢時處理)進行測速,二次雷達的詢問端和應答端均可實現測速。利用此方式考證二次雷達系統的測速能力時,要求系統詢問端與應答端的信號頻率完全相同,但在實際缺乏時統參考的背景下該條件難以達到,不具備工程實現意義。
3 測速原理
基于二次雷達系統詢問端和應答端收發頻率的不同,本文提出另一種測速方法:讓詢問端一方獲得應答端的相對速度,并且降低雙方必須完全同頻的要求,允許詢問端與應答端本振源之間存在頻差。
3.1 應答端測速
將詢問、應答的上下行標準頻率表示為fI0和fT0,因頻偏的關系詢問端和應答端實際工作使用的上行詢問頻率分別為fI1和fI2。
設應答端相對詢問端的接近速度為v,則應答端接收可估計出詢問信號頻偏為:

上式表明只有當詢問端的詢問發射頻率與應答端詢問接收頻率完全相等或差異已知時,詢問信號頻偏才能用于估計相對速度。
3.2 詢問端測速
在應答端的配合下,詢問端可以從應答信號頻偏參數中估計出相對速度,步驟如下:
步驟一:應答端從詢問信號中獲得頻偏。
詢問端以fI1詢問上行載頻發送周期脈沖串,應答端通過慢時處理獲得詢問接收頻率fI2與詢問發射信號之間的頻差fΔI:

式中,ε1為應答端估計誤差,上式表明應答端估計的接收頻偏中的有用信號由兩部分構成,第一個分量與相對速度成正比,第二個分量是詢問端應答端之間頻率源差異導致的詢問信號載波頻率差異。
步驟二:應答端以修正頻率發送應答信號。
應答端計算出一個應答信號修正頻率kfΔI,其中k=fT0/fI0,并將該頻率補償到應答信號中。即應答端以載頻fT2=kfI2+ΔfT2發射頻率為kfΔI的相參脈沖串應答信號,其中ΔfT2是應答端頻率源在接收詢問信號和發射應答信號間隔內的漂移引起的頻偏。
步驟三:詢問端解算速度。
詢問端接收經過補償的應答端相參應答信號,并通過慢時間處理獲得的頻偏為:
式中,ε2為詢問端估計誤差;ΔfT1是詢問端頻率源在發射詢問信號和接收應答信號間隔內的漂移引起的頻偏。
對于用類似恒溫晶振等高穩、高精度時鐘作為頻率源的設備,其頻率的短時精度至少比其標準全溫精度高1~2 個數量級,因此近似為:
進而速度估計為:
3.3 測速誤差
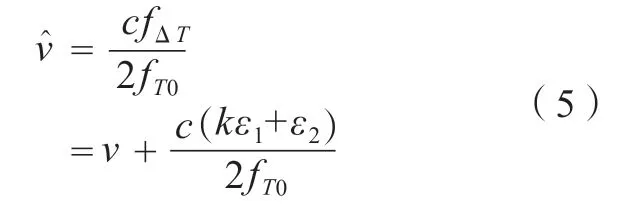
測速誤差主要來自估計誤差ε1和ε2,后者的理論精度受限于脈沖重復頻率、脈沖數量和信噪比,如果詢問端和應答端采用相同的技術體制進行設計,可以假設詢問端和應答端的頻率估計參數相同,則有其理論限為:
式中,N 為脈沖數量,那么速度估計的精度理論限制為:
3.4 仿真驗證
根據式(6),取N=4 時,對一定信噪比和重復頻率范圍(PRT)內的測速精度進行仿真,結果如圖1 所示。
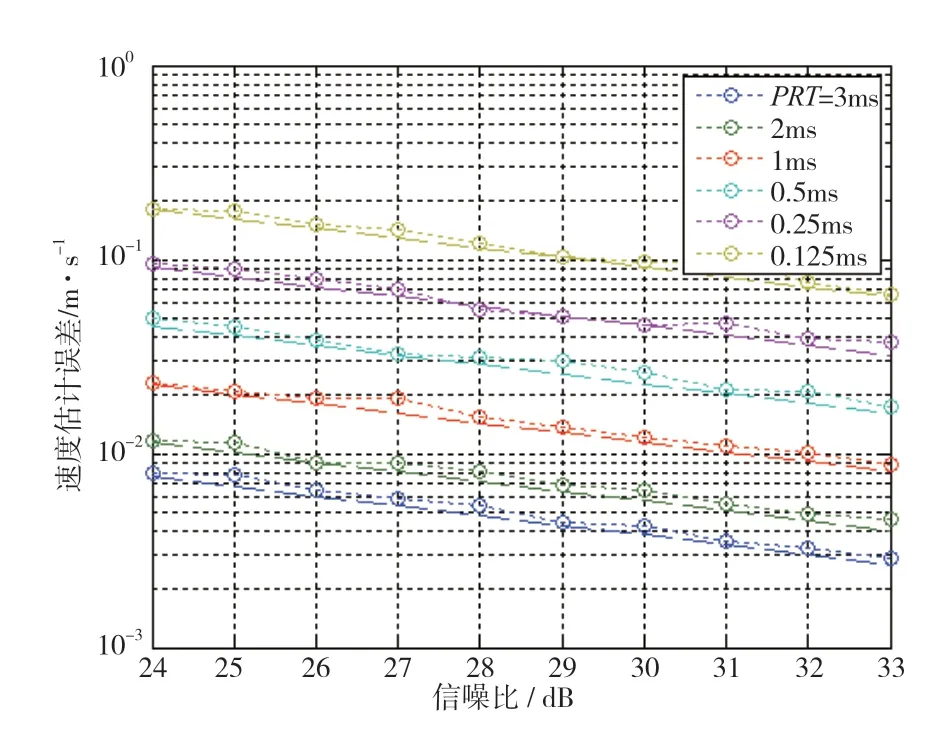
圖1 速度估計誤差
圖1 中長虛線為理論計算的誤差下限。從仿真結果可見,在仿真采用的參數范圍內,仿真統計誤差與理論值接近;在脈沖數量一定的條件下,測速精度隨著信噪比和PRT 的增大而提高。
4 典型系統設計
4.1 系統原理設計
現行空中交通管制系統,以及西方體制的軍用MARK 系列二次雷達系統的信號格式設計如圖2 所示。為了不干擾現役的空中交通管制系統,所設計信號格式須避開能引起誤觸發應答的信號間隔,尤其是8μs和21μs 這2 個間隔。

圖2 空中交通管制系統及西方體制信號格式
根據二次雷達原理,設計1 套典型的測速驗證系統,其波形如圖3 所示,詢問端發送2 個同步脈沖和1 個測量脈沖,應答端解出信號后經測量和修正后發出1 個測量回答脈沖,詢問端根據回答脈沖測量應答端的速度。
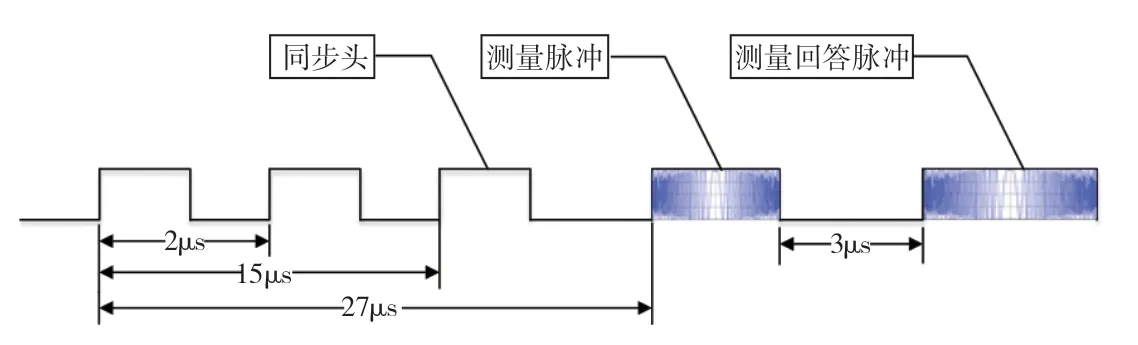
圖3 波形設計圖
前3個脈沖為同步脈沖,采用差分相移鍵控(DPSK)調制,與第一個脈沖前沿間距分別為2μs、15μs;第四個脈沖為間距測量起始脈沖,與第一個脈沖的前沿間距為27μs;3 個間距正好可以錯開空中交通管制系統的需求;回答脈沖的延時要求與現役中交通管制系統的要求一致為3μs。間距測起始量脈沖與回答脈沖均采用線性調頻(LFM)調制以提高信噪比。根據典型參數計算系統主要性能指標的測速精度可達到約0.1m/s。
4.2 系統架構設計
典型的測速驗證系統主要由詢問端和應答端組成,詢問端安裝于地面,一般與雷達共同安裝,應答端一般安裝于各型航空器上,應答端與其它航空設備一起安裝于航空器的尾部設備艙內,如圖4 所示。
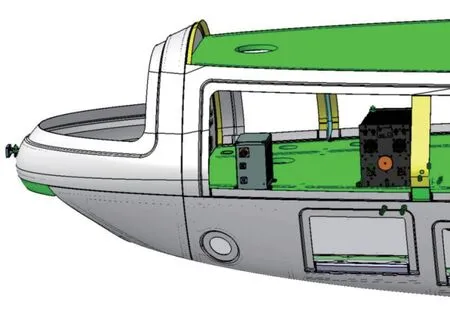
圖4 應答端安裝位置及安裝方式示意圖
詢問端和應答端設備均采用模塊化設計方法,均由電源和處理模塊、信道模塊組成,其三維模型如圖5 所示。
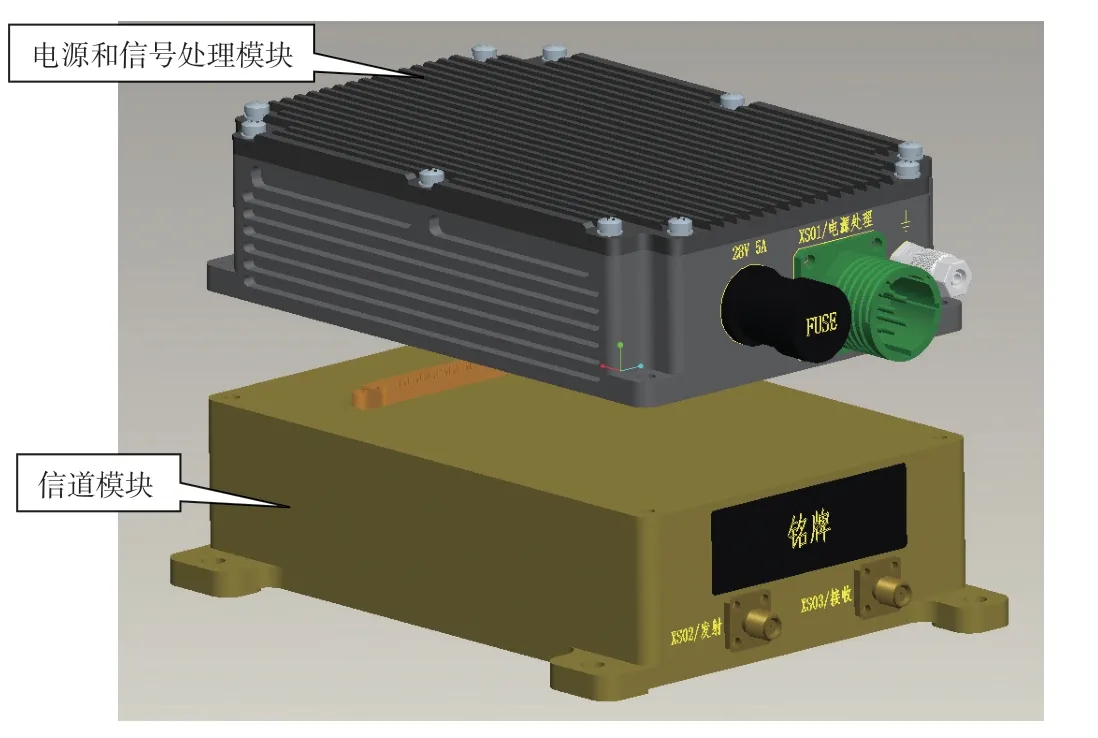
圖5 應答端或詢問端設備結構圖
電源和信號處理模塊與信道模塊信號連接通過模擬與數字混裝連接器盲插連接,能夠實現中頻信號與低頻信號的雙向傳輸。電源處理模塊中,電源板和數字板的信號連接通過低頻連接器盲插連接,能夠實現電源控制檢測、大功率供電。
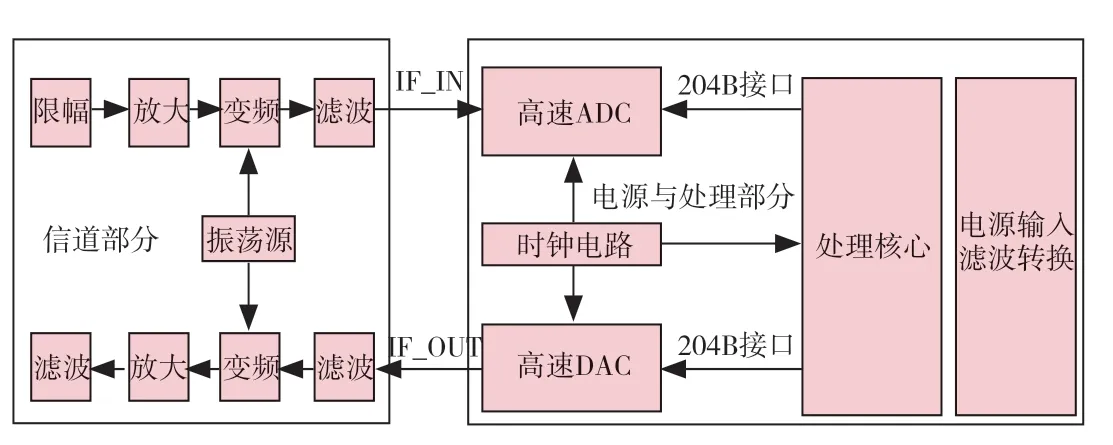
圖6 應答端或詢問端設備功能框圖
應答端和詢問端設備的功能原理框圖如圖6 所示,主要由處理核心、高速數模/模數轉換、時鐘電路、電源轉換電路等組成;處理核心主要由FPGA 及其配套電路組成,可以選取Xilinx 公司的K7 系列配合其外圍電路實現;高速數模/模數轉換可以選取ADI 公司的高速ADC 和高速DAC 來實現,數據輸入輸出采用JESD204B 接口可以提高數據率降低測量誤差;時鐘電路可以選取ADI 或TI 公司的專用時鐘芯片搭配晶振源實現;電源轉換部分主要實現將外部輸入電源進行濾波整形并轉換成內容需要的各路電壓;信道部分由振蕩源、變頻、濾波、限幅、放大等部分組成,主要完成所需的模擬射頻信號的接收和發射,可以根據設備使用場景的需要進行靈活設計。
5 結束語
本文對二次雷達系統提出了除傳統測向、測距定位能力外的第3 項高精度測速能力的設計概念,并對測速原理進行了理論推導,對測速誤差進行了分析;同時,設計了典型測速驗證系統,以期能在工程上實現應用,為二次雷達系統的未來開發提供相關研究支持。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
家庭影院技術(2017年9期)2017-09-26 03:41:45
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25