一種多特征自適應(yīng)學(xué)習(xí)機(jī)制的目標(biāo)跟蹤算法*
2021-01-19 11:00:36甘展鵬許華榮何原榮
計(jì)算機(jī)與數(shù)字工程 2020年12期
甘展鵬 許華榮,2 何原榮 曹 衛(wèi)
(1.廈門理工學(xué)院計(jì)算機(jī)與信息工程學(xué)院 廈門 361024)(2.廈龍工程技術(shù)研究院 龍巖 364000)
1 引言
隨著計(jì)算機(jī)和科學(xué)技術(shù)的發(fā)展,機(jī)器視覺(jué)廣泛的應(yīng)用于人們生活中的方方面面。在實(shí)際的生活中,目標(biāo)跟蹤技術(shù)已經(jīng)廣泛地應(yīng)用于智能視頻監(jiān)控、汽車導(dǎo)航、無(wú)人機(jī)的目標(biāo)跟蹤、智能交通等行業(yè)中[1~5],而相關(guān)濾波憑借的高速的處理能力和良好的跟蹤正確率受到人們的青睞。在2010年,Bolme[6]等人,通過(guò)計(jì)算最小均方誤差(MOSSE)計(jì)算相似性,首次將時(shí)域轉(zhuǎn)換到頻域進(jìn)行計(jì)算;2014年,Henriques等提出了多通道HOG特征的核相關(guān)濾波器KCF[7];Danelljan提出了具備尺度變化判別的DSST算法[8];2014年的SAMF[9]提出一種將灰度、HOG和CN相結(jié)的多特征表示以及加入尺度估計(jì)實(shí)現(xiàn)目標(biāo)跟蹤;在2016年,Bertinetto等提出STAPLE[10],利用顏色直方圖濾波器和HOG濾波器進(jìn)行互補(bǔ)學(xué)習(xí)跟蹤;在2017年,Danelljan提出ECO[11]通過(guò)因式分解卷積的方法簡(jiǎn)化特征提取。
上述的算法對(duì)相關(guān)濾波目標(biāo)跟蹤進(jìn)行了一定程度上的改進(jìn)。但是依舊存在以下幾個(gè)問(wèn)題:跟蹤的精度和正確率有待提高;在運(yùn)動(dòng)模糊或者遮擋情況下,容易發(fā)生漂移或者跟蹤失敗。針對(duì)以上問(wèn)題,本文分別單獨(dú)訓(xùn)練HOG+Gray濾波器和CN濾波器,然后線性加權(quán)融合兩個(gè)濾波器的響應(yīng)圖,來(lái)提高判別器判別能力;通過(guò)構(gòu)建尺度池,求取最大尺度來(lái)響應(yīng)輸出最佳尺度變化,以及融入反向檢測(cè)輸出正確尺度;通過(guò)目標(biāo)歷史運(yùn)動(dòng)狀態(tài)以及響應(yīng)變化提出一種自適應(yīng)學(xué)習(xí)率機(jī)制,實(shí)現(xiàn)動(dòng)態(tài)的模型更新。
2 KCF跟蹤算法
在跟蹤器的訓(xùn)練過(guò)程中,KCF利用循環(huán)矩陣進(jìn)行密集采樣,得到樣本集:{x1,x2,x3,..., }xn構(gòu)建線性嶺回歸模型:
其中,yi是樣本xi的標(biāo)簽,f為濾波器,ω為濾波器參數(shù),λ為正則化系數(shù)。
對(duì)線性嶺回歸進(jìn)行求解可得:

其中,X為樣本的循環(huán)矩陣,I為單位陣。
為了提高跟蹤器的判別能力,利用非線性函數(shù)φ(x)將樣本集映射到高維空間,此時(shí)

其中,α是w的對(duì)偶空間變量。并且引入核技巧,最終嶺回歸的解為

其中,K為核相關(guān)矩陣。借助循環(huán)矩陣的性質(zhì),最終求得在頻域中的解為

其中,∧表示傅里葉變換,k∧xx表示樣本x在傅里葉中的自相關(guān)。
3 一種多特征自適應(yīng)學(xué)習(xí)機(jī)制的目標(biāo)跟蹤算法
3.1 多特征線性融合
為提高跟蹤器的判別能力,將HOG、GRAY和CN三種不同屬性的特征進(jìn)行線性加權(quán)融合。首先訓(xùn)HOG+GRAY特征的濾波器和CN顏色濾波器。其次,計(jì)算兩個(gè)濾波器的APCE[12](average peak to correlation energy)響應(yīng)值。最后,線性加權(quán)融合兩個(gè)濾波器的輸出響應(yīng),得到最終響應(yīng)。其中,APCE計(jì)算如下:

其中,R是響應(yīng)圖,“mean”為均值操作。
分別計(jì)算兩個(gè)濾波器輸出響應(yīng)的置信值A(chǔ)PCEHOG+GRAY,APCECN來(lái)自適應(yīng)線性加權(quán)得到最終響應(yīng)R:
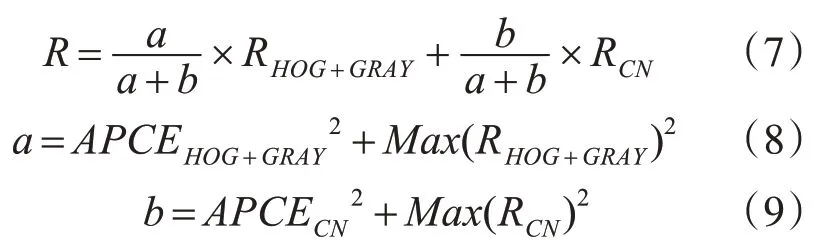
其中,RHOG+GRAY、RCN分別是HOG+GRAY和CN濾波器兩個(gè)濾波器的輸出響應(yīng)圖。
3.2 尺度濾波器與反向檢測(cè)
針對(duì)KCF不具備尺度變換問(wèn)題,文獻(xiàn)[8,13]采用一個(gè)一維的尺度估計(jì)濾波器來(lái)輸出對(duì)應(yīng)目標(biāo)的尺度,并加入反向檢測(cè)機(jī)制,提高尺度判別準(zhǔn)確的。
通過(guò)當(dāng)前幀目標(biāo)的寬P、高R以及尺度因子a來(lái)確定目標(biāo)的尺寸:

根據(jù)式(10)生成對(duì)應(yīng)大小的圖像塊,并且提取每個(gè)圖像塊的d維特征,從而訓(xùn)練一個(gè)尺度濾波器h。
雖然通過(guò)尺度濾波器能夠較好地在物體發(fā)生尺度變換的情況下正確的框出大小,但是難免會(huì)出現(xiàn)尺度估計(jì)錯(cuò)誤的情況。如圖1 human3中,目標(biāo)尺度發(fā)生很微小的變化,但是由于尺度濾波器錯(cuò)誤估計(jì),導(dǎo)致納入太多錯(cuò)誤背景信息,發(fā)生濾波器跟蹤丟失。
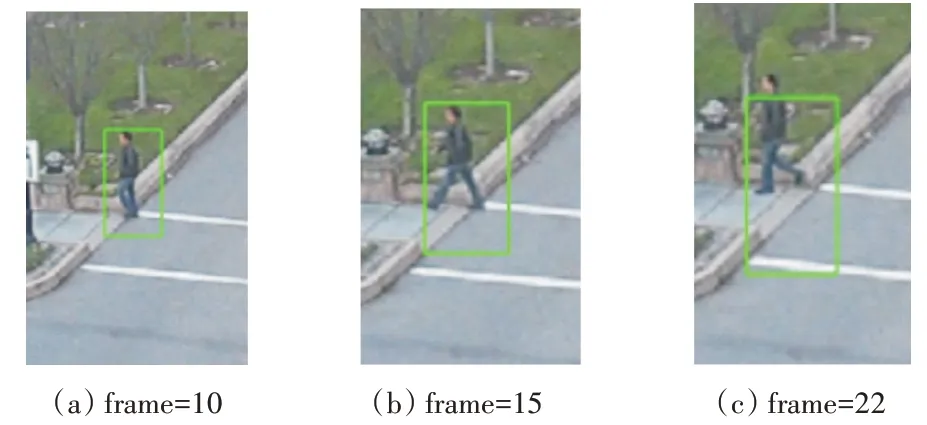
圖1 human3視頻序列
因此,本文針對(duì)上述問(wèn)題,提出一種反向檢測(cè)的方式來(lái)避免錯(cuò)誤的尺度估計(jì)。具體流程:首先通過(guò)尺度濾波器輸出最佳目標(biāo)尺度,然后將得到的新尺度反向的進(jìn)行上述的HOG+Gray濾波器和CN顏色特征濾波器檢測(cè)并線性融合得到新的響應(yīng)圖R,通過(guò)計(jì)算當(dāng)前估計(jì)尺度下目標(biāo)的APCE置信度和前一幀APCE置信度的大小。當(dāng)反向檢測(cè)最終的APCE滿足APCEt<β*APCEt-1時(shí)候,停止更新目標(biāo)尺度;否則更新目標(biāo)尺度。
3.3 自適應(yīng)學(xué)習(xí)率
由于傳統(tǒng)的KCF采用固定的學(xué)習(xí)率進(jìn)行更新模型逐幀更新,所以當(dāng)物體發(fā)生快速運(yùn)動(dòng)或者遮擋的時(shí)候容易導(dǎo)致模型污染。針對(duì)以上問(wèn)題,本文提出一種根據(jù)物體運(yùn)動(dòng)速度與APCE相結(jié)合的自動(dòng)學(xué)習(xí)率調(diào)整模型。在先前提到的APCE中,其可以反映響應(yīng)圖的波動(dòng)情況。當(dāng)目標(biāo)快速移動(dòng)或者發(fā)生遮擋的時(shí)候APCE會(huì)出現(xiàn)明顯的下降,意味著當(dāng)前的響應(yīng)置信度不高,此時(shí)可以通過(guò)調(diào)低學(xué)習(xí)率或者禁止模型更新,防止模型引入過(guò)多的噪聲干擾。更新率θ1與APCE取值之間的關(guān)系滿足以下公式:

其中,mean_apce是歷史幀的均值,公式如下:
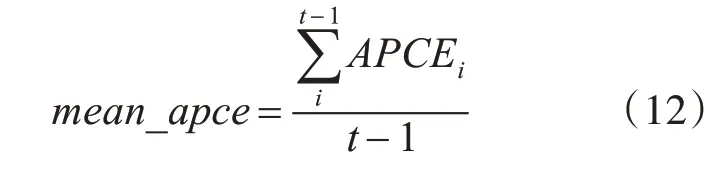
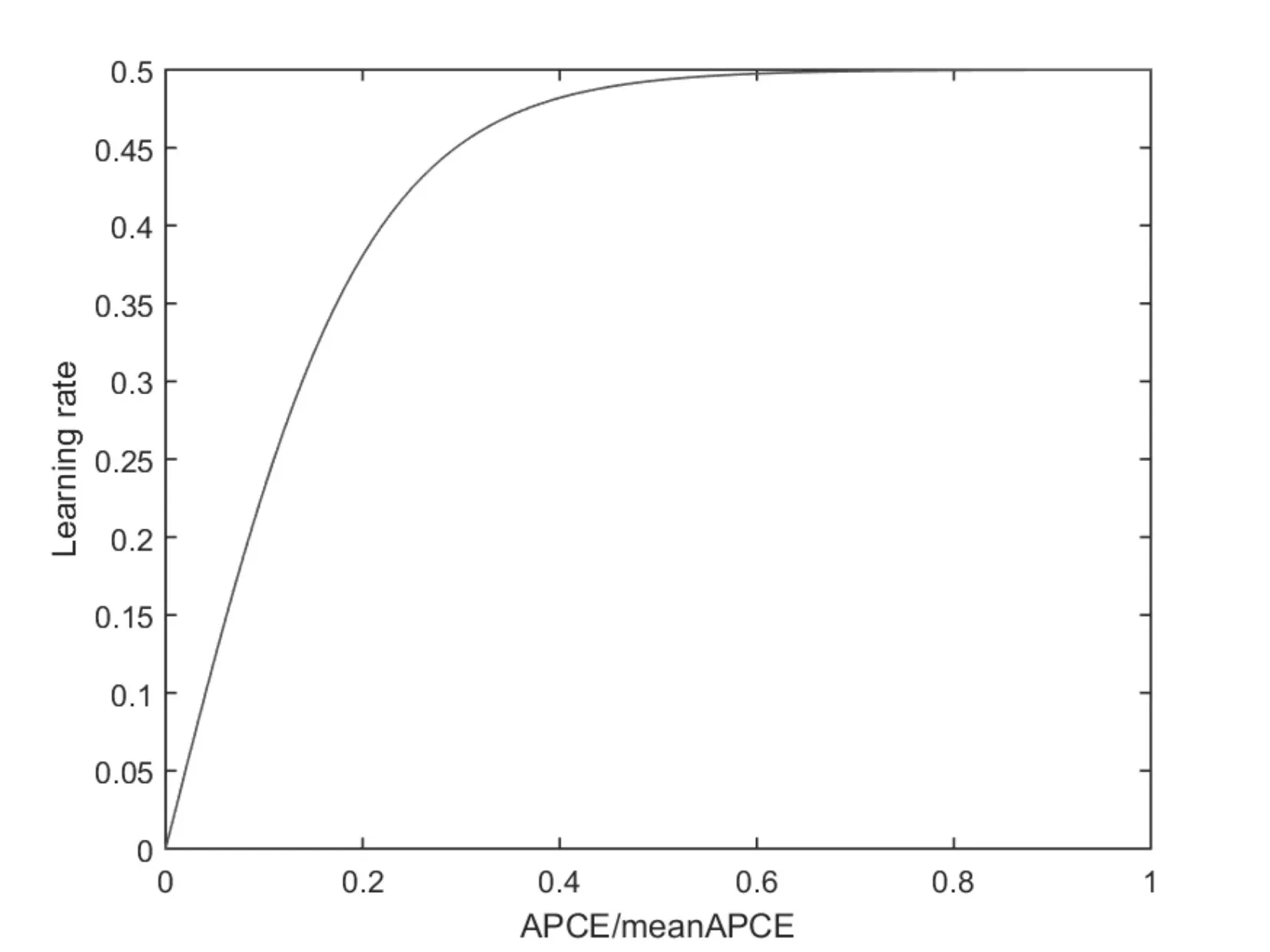
圖2 APCE的變化-更新率曲線
在式(11)和(12)中的APCE由式(6)計(jì)算得到。
有時(shí)候,單獨(dú)的使用APCE來(lái)計(jì)算更新率不一定能夠很好地反映物體的運(yùn)動(dòng)狀態(tài)。因此引入物體運(yùn)動(dòng)速度來(lái)估計(jì)模型的更新率。當(dāng)物體快速移動(dòng)的時(shí)候,應(yīng)加大更新率,防止模型更新過(guò)慢而導(dǎo)致跟丟;當(dāng)物體運(yùn)動(dòng)較為緩慢,可以降低更新率。本文將上一幀目標(biāo)的中心位置與當(dāng)前幀目標(biāo)的中心位置的歐氏距離視為物體每一幀的運(yùn)動(dòng)速度。更新率θ2與速度v之間的關(guān)系式如下[14]:
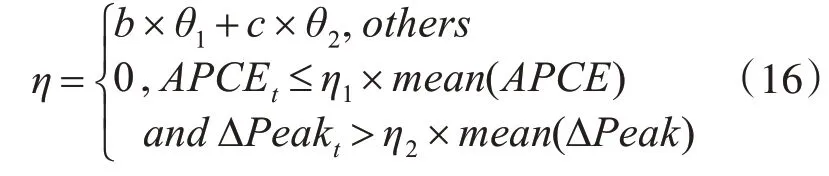
當(dāng)物體發(fā)生遮擋的時(shí)候,根據(jù)文獻(xiàn)[13,15]提出的遮擋判別策略,本文將兩者的優(yōu)點(diǎn)融合在一起,用于物體發(fā)生遮擋的時(shí)候,停止模型更新。
首先,計(jì)算當(dāng)前的相鄰兩幀的峰值變換情況:

其次分別計(jì)算歷史峰值變換均值:
根據(jù)式(12)計(jì)算歷史均值mean(APCE)與APCEt之間的比例關(guān)系。在兩種同時(shí)滿足一點(diǎn)比例的時(shí)候,說(shuō)明物體發(fā)生了遮擋應(yīng)以較小的學(xué)習(xí)率更新模型或者停止模型的更新。
最終,為了得到更加魯棒的自動(dòng)更新率,本文將兩者進(jìn)行線性融合,每隔兩幀計(jì)算最終的學(xué)習(xí)因子η,如下:
3.4 算法步驟
本文算法步驟如下:
輸入:視頻幀frames.
輸出:目標(biāo)框target_sz,中心位置Pos.
1)初始化HOG+Gray位置濾波器和CN位置濾波器,尺度濾波器h.
2)對(duì)于第i幀,根據(jù)式(7)計(jì)算位置濾波器最終的響應(yīng)圖R.
3)根據(jù)位置濾波器得到的目標(biāo)位置,通過(guò)尺度濾波器計(jì)算S個(gè)尺度下對(duì)應(yīng)的響應(yīng),輸出尺度濾波器最佳尺度S_Best,并將該尺度反向傳回到位置濾波器HOG+Gray和CN進(jìn)行計(jì)算APCE置信度,從而輸出最終的最佳目標(biāo)尺度.
4)每隔兩幀計(jì)算當(dāng)前目標(biāo)的學(xué)習(xí)因子,更新目標(biāo)濾波器的模型.
4 分析與討論
4.1 實(shí)驗(yàn)環(huán)境
實(shí)驗(yàn)以Matlab 2015a為開(kāi)發(fā)平臺(tái),在Windows 10系統(tǒng),處理器Inter(R)Core(TM)i5-9300H CPU@2.40GHz的電腦上測(cè)試。實(shí)驗(yàn)用的是Visual Tracker Benchmark測(cè)試的OTB-100數(shù)據(jù)集進(jìn)行測(cè)試[16~17]。在整個(gè)目標(biāo)跟蹤實(shí)驗(yàn)里,與主流的跟蹤算法DSST、MOSSE_CA[18]、DCF_CA[18],KCF、SAMF、CT[19]、CSK[20]共七種算法進(jìn)行對(duì)比實(shí)驗(yàn)。
4.2 實(shí)驗(yàn)系數(shù)確定
經(jīng)過(guò)實(shí)驗(yàn)表明,在算法跟蹤矩形框與實(shí)際標(biāo)注框的中心距離設(shè)置為20的情況下,自動(dòng)學(xué)習(xí)率的系數(shù)選擇為b=0.018,c=0.01實(shí)驗(yàn)成功率最好。
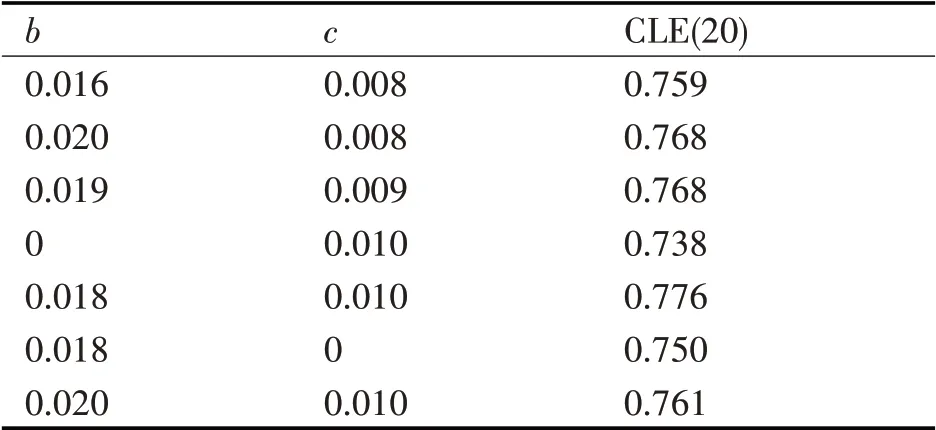
表1 不同系數(shù)下的目標(biāo)跟蹤成功率
4.3 定量分析
經(jīng)過(guò)試驗(yàn)分析,本文的參數(shù)選擇為首幀學(xué)習(xí)率learning_factor=0.02;動(dòng)態(tài)學(xué)習(xí)率更新系數(shù)b=0.018,c=0.01,β=0.95,η1=1.5,η2=0.45,KCF和DSST的λ=10-4。其余參數(shù)和KCF、DSST一樣。
從上圖可以得知,本文的算法在OTB-100數(shù)據(jù)集上,選擇OPE評(píng)測(cè)方法得到的DP和OP相較于其他7種算法具有較好的成功率和精度。在精度曲線圖設(shè)置評(píng)測(cè)閾值為20像素點(diǎn)的情況下,DP得分為0.776,相較于SAMF和DCF_CA分別提升了2.5%和3.2%;在重疊率閾值為0.5的情況下,OP得分為0.699,相較于SAMF和DSST提升了3%和8.6%。為了更好地評(píng)測(cè)本文算法與其他算法的性能差異,在OTB-100數(shù)據(jù)集中11種不同屬性目標(biāo)跟蹤場(chǎng)景下進(jìn)行分析。表2~3中格數(shù)據(jù)加粗的為評(píng)分第一,下劃線為第二。

圖3 8種算法在OTB-100中得到的精度曲線圖和成功率曲線圖
從表2~4可以看出,在保持較好的跟蹤速度的同時(shí),本文算法還能夠具備較優(yōu)的跟蹤準(zhǔn)確率。
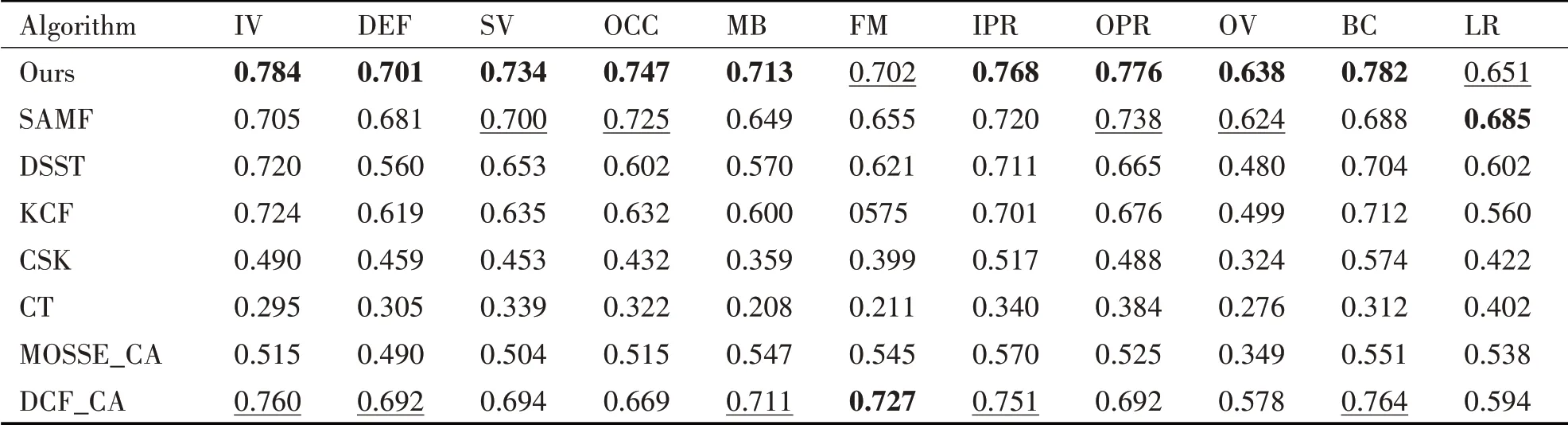
表2 8種目標(biāo)跟蹤算法在11種不同場(chǎng)景下的距離精度DP評(píng)價(jià)指標(biāo)
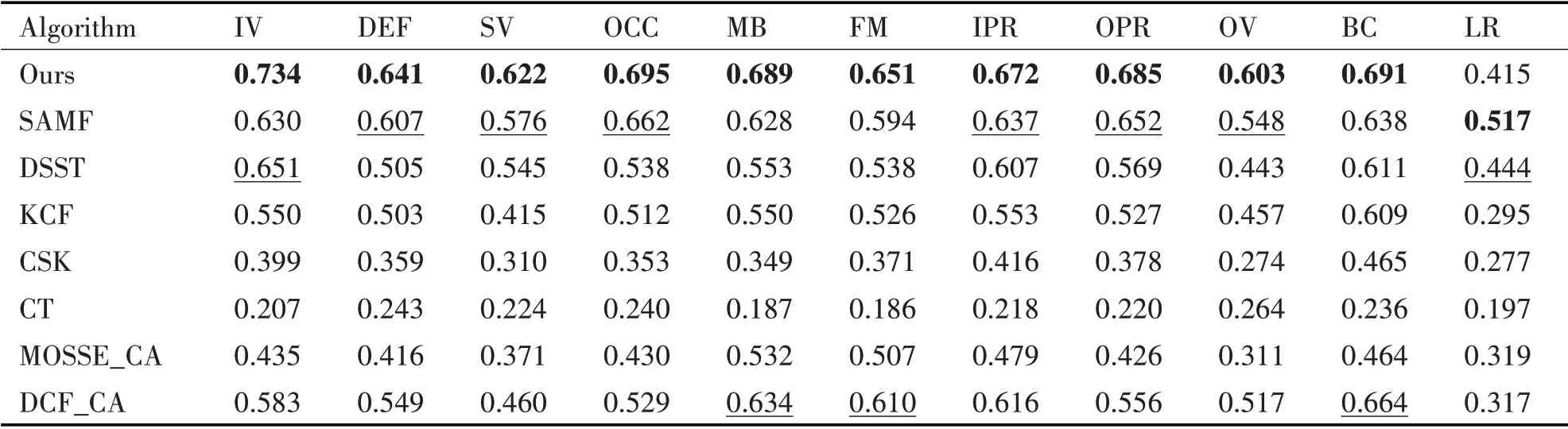
表3 8種目標(biāo)跟蹤算法在11種不同場(chǎng)景下的成功率OP評(píng)價(jià)指標(biāo)

表4 8種算法在OTB-100上的平均速度和精度
5 結(jié)語(yǔ)
本文算法是在傳統(tǒng)的KCF核相關(guān)濾波框架上,提出一種多特征融合、尺度判別和自適應(yīng)學(xué)習(xí)率的跟蹤算法。經(jīng)過(guò)實(shí)驗(yàn)表明,本文算法在目標(biāo)尺度變換、遮擋、快速運(yùn)動(dòng)以及光照變化等具有較好的跟蹤魯棒性。同時(shí),在跟蹤速度上平均幀率為45.5fps,滿足實(shí)時(shí)物體跟蹤要求。本文算法主要是針對(duì)目標(biāo)跟蹤的短時(shí)跟蹤,接下來(lái)的工作可以從長(zhǎng)時(shí)間目標(biāo)跟蹤入手;本文選擇的特征主要是傳統(tǒng)的手工特征,為了達(dá)到更好的跟蹤效果,未來(lái)可以嘗試更具深層次的深度特征。
猜你喜歡
小獼猴智力畫(huà)刊(2022年9期)2022-11-04 02:31:42
今日農(nóng)業(yè)(2021年19期)2022-01-12 06:16:36
中老年保健(2021年11期)2021-08-22 03:15:44
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2021年1期)2021-03-19 08:28:38
現(xiàn)代出版(2020年3期)2020-06-20 07:10:34
瘋狂英語(yǔ)·新策略(2019年10期)2019-12-13 08:43:28
小哥白尼(趣味科學(xué))(2019年6期)2019-10-10 01:01:50
當(dāng)代陜西(2019年10期)2019-06-03 10:12:04
數(shù)學(xué)小靈通·3-4年級(jí)(2017年9期)2017-10-13 08:10:54
發(fā)明與創(chuàng)新(2016年38期)2016-08-22 03:02:52