一種搖臂輪組與行星輪組相結合的爬樓越障機器人結構設計
2021-01-21 06:35:50張聲嵐鐘學濤甘禮福鐘志賢
河南科技大學學報(自然科學版) 2021年3期
張聲嵐,鐘學濤,甘禮福,鐘志賢
(桂林理工大學 機械與控制工程學院,廣西 桂林 541004)
0 引言
隨著機器人控制和人機交互等關鍵技術的飛速發展,對機器人移動的方式和適應能力有了更高要求,以滿足不同環境下機器人作業要求[1]。多地形自適應移動方式能夠根據地形特點自適應調整機器人的移動方式,實現機器人高效行走和越障,有效提高機器人的作業能力和效率,具有重要的研究意義和應用價值[2]。
基于足式和履帶式結構設計的移動機器人,雖然對復雜地形具有一定的適應性,但存在結構復雜、磨損度高以及控制難度大等特點[3];而基于輪式結構的移動機器人靈活性高、穩定性好、運動控制簡單,具有廣泛的應用發展前景[4]。當前,許多學者對輪式的多地形自適應行走結構展開了研究,例如文獻[5]對六輪全地形移動機器人構建越障動力學模型,分析機器人的越障性能。文獻[6]提出行星輪系越障結構,通過定軸和行星輪系之間的轉換,實現適應礦產業開采的越障、跨溝和爬坡等工況。文獻[7]提出了一種被動擺臂結構的八輪機器人,通過擺臂被動轉動適應地形變化,實現單級臺階和崎嶇地形中的運動。
上述研究均只對單級垂直臺階或單個障礙物進行適應性分析,并沒有對多級連續臺階以及多個連續障礙物進行適應性分析。本文提出了一種自動適應地形變化的搖臂輪組和行星輪組相結合的爬樓越障機器人,通過搖臂輪組被動搖臂運動和行星輪組主動翻轉運動自動適應地形變化,實現連續攀爬通過多級連續垂直臺階和多個連續障礙物。并建立機器人仿真模型和物理樣機,分析機器人爬樓越障的效率和穩定裕度,驗證了機器人的地形適應能力和越障能力。
1 機器人總體方案設計
1.1 機器人需求分析
搖臂輪組與行星輪組相結合的多輪組式爬樓機器人是在移動機器人的基礎上進行改進,提高了機器人的靈活性、路面適應性和越障性等性能。本文結合中國樓梯建造標準設計爬樓越障方案。為了滿足爬樓機器人的各項性能需求,機器人應滿足以下設計要求:路面適應性好,能輕松翻越一般路面障礙;能翻越建筑標準中大部分的樓梯,并且能靈活通過樓道;機器人運行平穩、可靠,能進行全向移動;控制簡單,易操作。
基于上述設計要求,本文設計的爬樓機器人應滿足以下性能指標。
(I)控制模式:無干擾下,無線遙控器作用范圍不小于200 m,基于設計程序與傳感器反饋值自動行駛。
(II)運行速度:平地行駛最大速度達3 m/s。
(III)承載能力:包含自身質量,最小承載質量10 kg。
(IV)運動方向:全向移動,包括前后移動、左右橫移、斜向運動與原地旋轉。
(V)機器人尺寸:總體尺寸控制在1 m3以內。
1.2 機器人方案設計
機器人整體機械結構包括搖臂輪組、行星輪組與底盤,其中,搖臂輪組由搖臂架、搖臂輪與導向裝置組成;行星輪組由行星架、行星齒輪組、內外軸傳動裝置以及行星輪組成,主要用于機器人移動與爬樓越障。采用麥克納姆(Mecanum)輪作為搖臂輪與行星輪,實現全方位移動,并采用體積小、力矩大且易于控制的直流無刷減速電機作為機器人動力系統。獨立懸掛底盤由底板組、附橋與避震系統組成,影響機器人的整體穩定性。
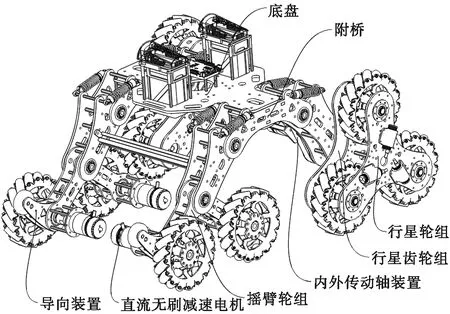
圖1 爬樓機器人三維模型圖
本文設計的機器人長×寬×高為772 mm×638 mm×415 mm;利用SolidWorks三維軟件對模型進行質量計算,自身質量約15 kg,滿足設計方案中機器人的尺寸及質量要求。爬樓機器人三維模型圖如圖1所示。
爬樓機器人整體采用以底盤為中心,輪組兩側對稱式分布設計。底盤用于安裝機器人控制系統與電源,并作為機器人運載平臺。兩側附橋處設計縱向獨立懸掛避震系統,緩沖機器人在啟動、急停以及與障礙物碰撞時產生的慣性。
機器人通過搖臂輪組的搖臂運動、行星輪組翻轉運動以及各驅動輪的旋轉運動,實現機器人連續爬樓越障[8]。當機器人在平地運動時,由于搖臂輪組與附橋連接處無驅動,主要通過外力與路面起伏情況做被動搖臂運動,同時行星架翻轉驅動電機無動力輸出,運動原理與搖臂輪組相同;當機器人在爬樓運動時,搖臂輪組前輪在導向裝置的輔助下抬起并爬越樓梯,行星輪組在直流無刷減速電機的驅動力作用下做翻轉運動,從而實現連續爬樓[9]。
2 機器人關鍵部件設計
2.1 關鍵結構尺寸設計
根據《民用建筑設計統一標準》[10]規定,樓梯踏步高度應小于210 mm,并大于140 mm,樓梯踏步的寬度應采用220 mm、240 mm、260 mm、280 mm、300 mm、320 mm。選擇踏步高度a×踏步寬度b為150 mm×300 mm的常見樓梯尺寸,進行爬樓越障機構的驅動輪軸距尺寸、輪子尺寸以及底盤附橋的兩端中心距尺寸等關鍵尺寸設計。
圖2為機器人關鍵尺寸圖。為滿足機器人連續爬樓越障,兩搖臂輪需同時落在樓梯水平面上,以及能跨越樓梯垂直面,搖臂輪間的中間距尺寸c應滿足[11]:
c≥a;
(1)
c+r≤b,
(2)
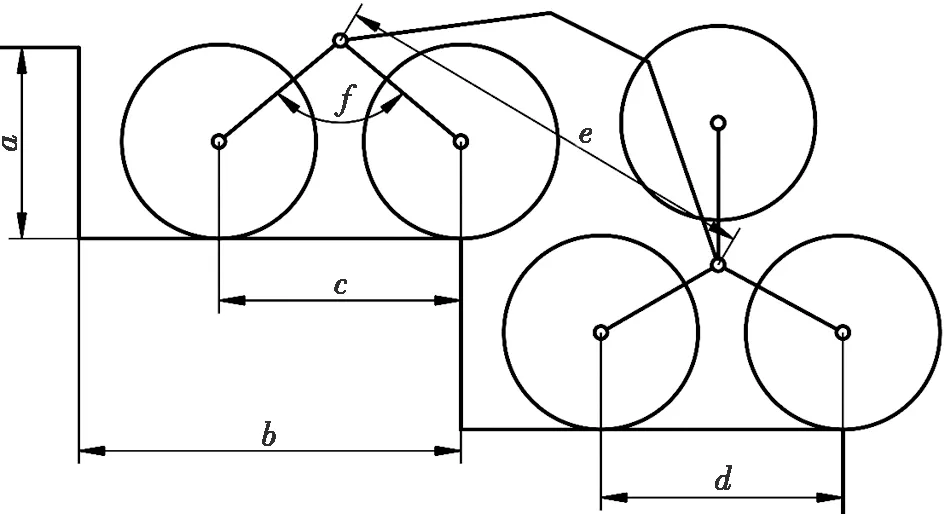
圖2 機器人關鍵尺寸圖
其中:a=150 mm;b=300 mm;r為麥克納姆輪半徑,根據常見樓梯的尺寸,設計中選取直徑150 mm的麥克納姆輪作為驅動輪,則r=75 mm。根據式(1)和式(2)得:
150 mm≤c≤225 mm。
(3)
搖臂輪組驅動輪軸距c取靠近中間值,即c=190 mm;行星輪組驅動輪軸距取d=c=190 mm。防止出現受力死角,導致搖臂輪組前輪無法抬起,搖臂架角度f≥90°,并且行星輪采取三輪120°均布,則設計中可取搖臂架角度f=100°。為保證搖臂輪組與行星輪組在運動過程中不發生干涉,底盤附橋與兩輪組連接處中心距尺寸e應滿足[12]:
(4)
計算得e>340 mm。為使結構設計合理,防止與爬越其他類型的樓梯發生干涉,設計中取e=400 mm。
2.2 搖臂輪組結構設計
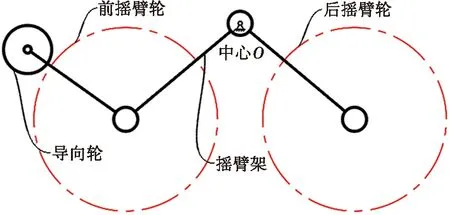
圖3 搖臂輪組結構簡圖
搖臂輪組結構包括搖臂架、驅動輪及導向裝置,結構簡圖如圖3所示。搖臂架兩端安裝麥克納姆輪作為驅動輪,通過直流無刷減速電機經聯軸器驅動。導向裝置由導向輪與導向架組成,固定在搖臂輪架前端,搖臂架與導向架主要由碳纖維板和銅柱通過螺栓固定組成。搖臂輪組結構通過銷軸固定在附橋前端,與障礙物接觸受力,隨路面的起伏變化做被動搖臂運動,從而爬越障礙,平穩運行與適應路面環境[13]。
2.3 行星輪組結構設計
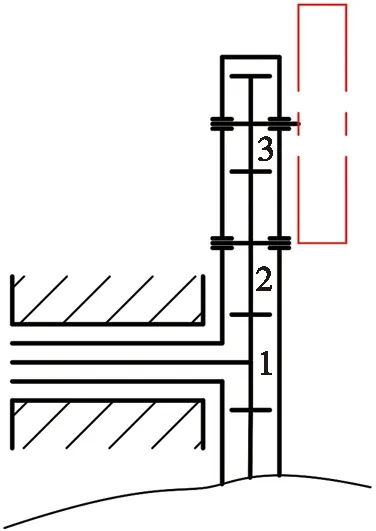
行星輪組結構主要由行星架、行星齒輪組、內外軸傳動裝置以及驅動輪組成,其中,行星齒輪組、內外軸傳動裝置以及驅動輪固定在行星架上。行星齒輪組結構與齒輪傳動示意圖如圖4所示。為了實現行星輪組翻轉與行星輪旋轉進行獨立運動,其傳動系統結構設計內外軸傳動,分為內傳動軸傳動與外傳動軸傳動。行星輪組傳動簡圖如圖4a所示。直流無刷減速電機通過同步帶進行一級減速,驅動固定在行星架上的外傳動軸,行星輪組翻轉。行星輪的旋轉由直流無刷減速電機驅動內傳動軸末端中心齒輪1,通過固定在行星架上的中間過渡齒輪2,將動力傳遞到驅動末端的齒輪3,為驅動輪提供3個速度大小與方向一致的旋轉運動,行星齒輪傳動路徑如圖4b所示。內外軸傳動裝置的功能使機器人后輪組實現兩個互不干擾的獨立運動,為后輪爬升樓梯與障礙提供保障。
2.4 避震系統結構設計
良好的懸掛系統不僅可以抵消路面不平產生的沖擊,提高爬樓越障裝置的道路適應性和平穩性,同時也可以降低各輪組裝配時可能存在的平面度偏差,使需要著地的麥克納姆輪全部接觸地面。設計縱向獨立懸掛避震系統結構,將金屬液壓避震縱向安裝在輪組與底盤之間,可以將不平路面激勵產生的動能轉化為彈簧的彈性勢能,起到緩沖作用。金屬液壓避震固定端與附橋由鉸鏈機構相連接,對麥克納姆輪的運動軌跡起到導向作用。
2.5 驅動輪布置方式分析
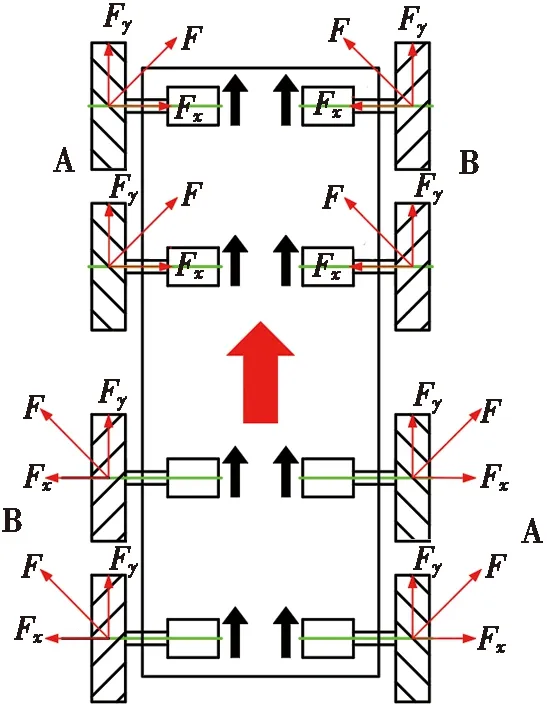
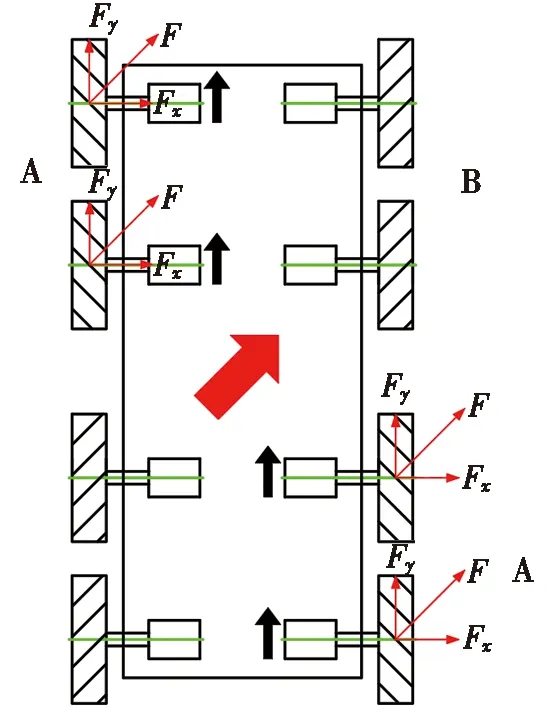
爬樓機器人的輪組驅動輪設計為麥克納姆輪,并采用直流無刷減速電機作為動力輸入。麥克納姆輪以其靈活性和多樣性,在全向智能移動裝備領域得到了廣泛的應用[14],麥克納姆輪在電機的驅動力作用下,會同時產生轉動和沿軸向運動的作用力,實現前行、橫移、斜行、旋轉等多種運動方式[15]。該爬樓機器人的平地運動模式為八輪著地,每個麥克納姆輪均為主動輪,各輪組落地的麥克納姆輪轉向一致。根據麥克納姆輪的輪緣滾子分布情況、自身的運動特性以及對各個麥克納姆輪的受力分析,以ABAB型的分布形式進行布置,各項移動分解示意圖如圖5所示。如圖5a所示,當全部輪子向前轉動時,A、B輪組的軸向力Fx被相互抵消,機器人向前移動,后退同理。如圖5b所示,當A輪組向前轉動、B輪組向后轉動時,向前向后的力Fy被抵消,機器人向右移動,向左移動同理。如圖5c所示,當A輪組向前轉動、B輪組不轉時,產生一個斜向右前方的合力F使機器人向右前方移動,其他方向的斜向移動同理。如圖5d所示,當右側輪子向前轉動、左側輪子向后轉動時,輪組間向前向后的力Fy被抵消,機器人向右旋轉,反之向左旋轉。
3 爬樓越障過程及仿真分析
為驗證爬樓機器人的爬樓越障性能與運動軌跡的合理性,以及通過仿真結果優化各結構的相關設計參數,對其進行運動仿真分析。圖6為機器人爬樓越障過程仿真圖。機器人在遇到樓梯時,切換為爬樓運動模式。導向輪最先碰到樓梯豎直面,在驅動輪驅動力以及摩擦力的作用下,搖臂輪組前輪受力抬起做被動搖臂運動,輪子貼著樓梯表面爬升樓梯,如圖6a所示。在搖臂輪組爬升至第2階樓梯時,行星輪組上安裝的紅外傳感器檢測到障礙高于星輪半徑以及星輪逼近障礙時,行星架做翻轉運動且行星輪做旋轉運動,行星輪組翻越樓梯,如圖6b所示。機器人在連續爬樓過程中,搖臂輪組做被動式搖臂運動,機器人同時有4個驅動輪著地,即一側兩個驅動輪著地,提供足夠的驅動力完成連續的爬樓運動,如圖6c所示。在搖臂輪組與行星輪組的配合運動下,機器人最終完成整個爬樓過程,如圖6d所示。
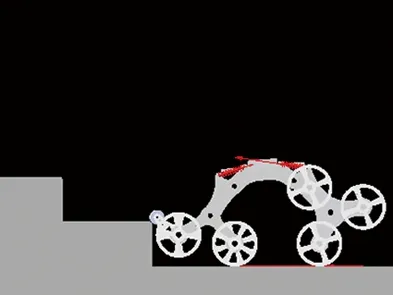
(a) 爬升第1階樓梯
機器人爬樓過程中,搖臂輪中心、行星輪中心與質心的運動軌跡變化如圖7所示,仿真測試得爬越13級踏步高度a×踏步寬度b為150 mm×300 mm的樓梯用時50 s。機器人在爬樓過程中,根據圖7a所示,搖臂輪中心運動軌跡變化與樓梯表面形狀變化大致相同,表明搖臂輪組緊貼樓梯表面運動,且過程較為平穩。根據圖7b可知:行星輪進行4~5次翻轉,行星輪組翻轉一周爬越3階樓梯,爬樓效率較高。由圖7c可知:質心運動軌跡整體波動形狀符合樓梯表面變化趨勢,且曲線的變化趨勢較為平緩,無大幅度的波動與尖角產生,機器人在爬樓越障過程中無大幅度抖動,整體爬樓過程較為穩定。同時通過設置樓梯級數為13級,測試機器人的適應能力,機器人爬行多種尺寸樓梯試驗數據如表1所示。從表1中可以看出:機器人能夠適應多種樓梯爬行,且爬行的效率較高。
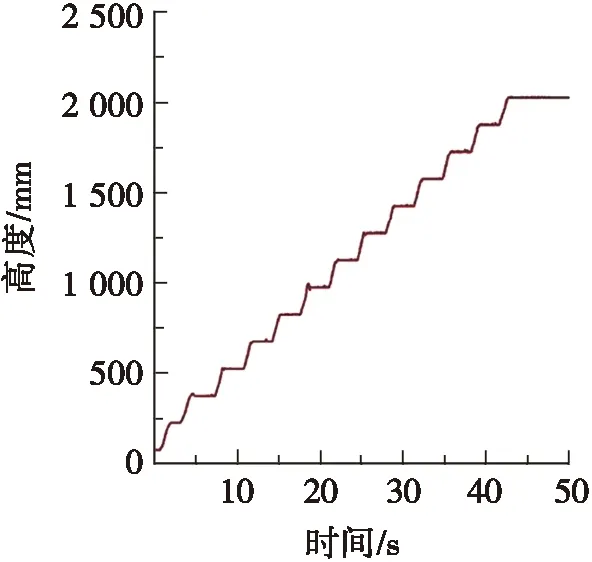
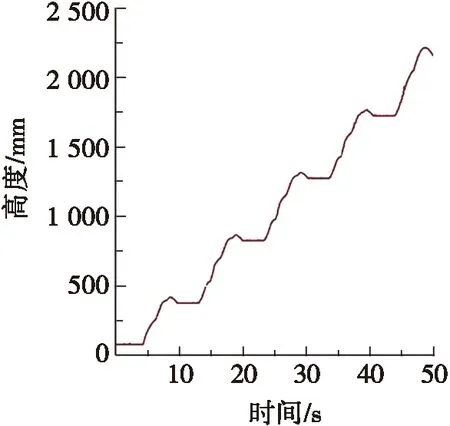
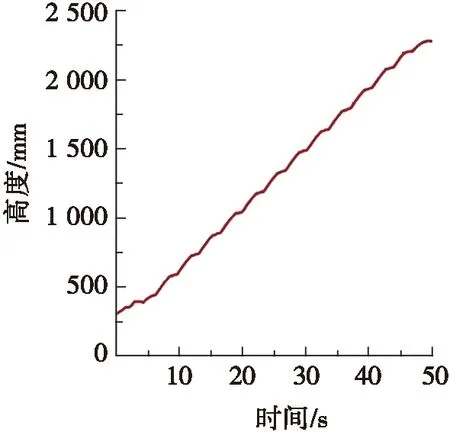
(a) 搖臂輪中心運動軌跡 (b) 行星輪中心運動軌跡 (c) 質心運動軌跡
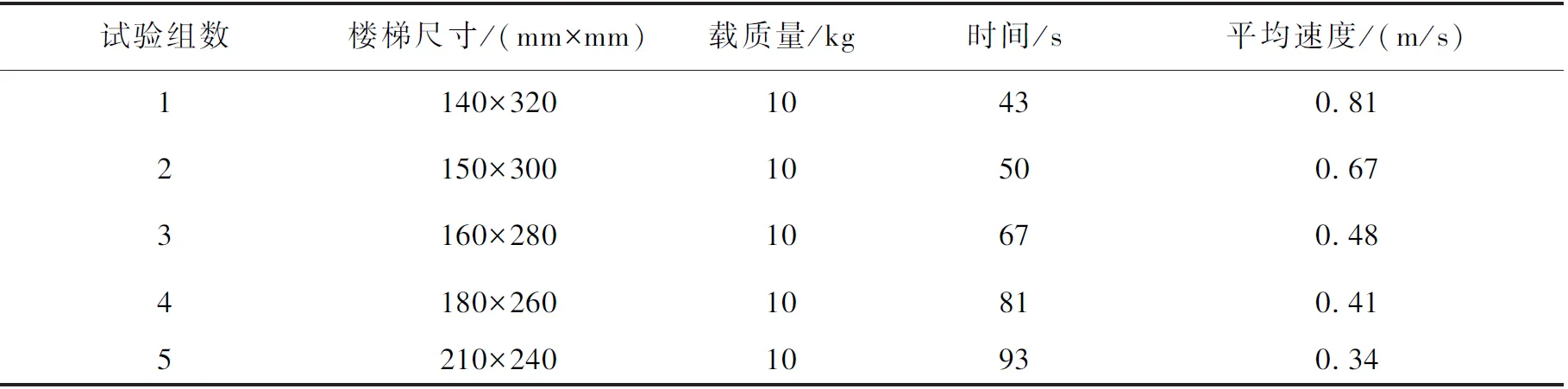
表1 機器人爬樓試驗數據
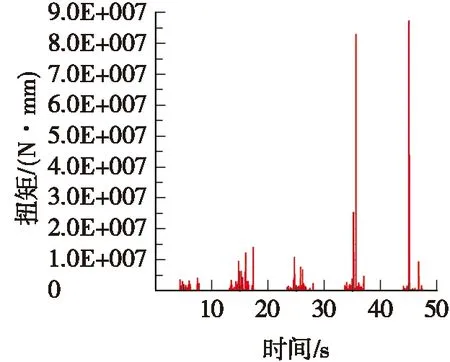
機器人搖臂輪電機轉矩的變化如圖8所示,4個電機的轉矩變化圖不一致,且峰值出現在不同時間,這充分驗證了搖臂輪接觸樓梯豎直面后做搖臂運動是一個自適應過程,不同時間搖臂輪與樓梯接觸點的負載實時變化,最終實現搖臂輪組穩定爬越樓梯。
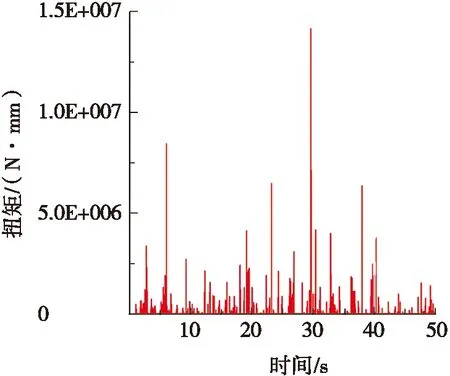
(a) 電機1
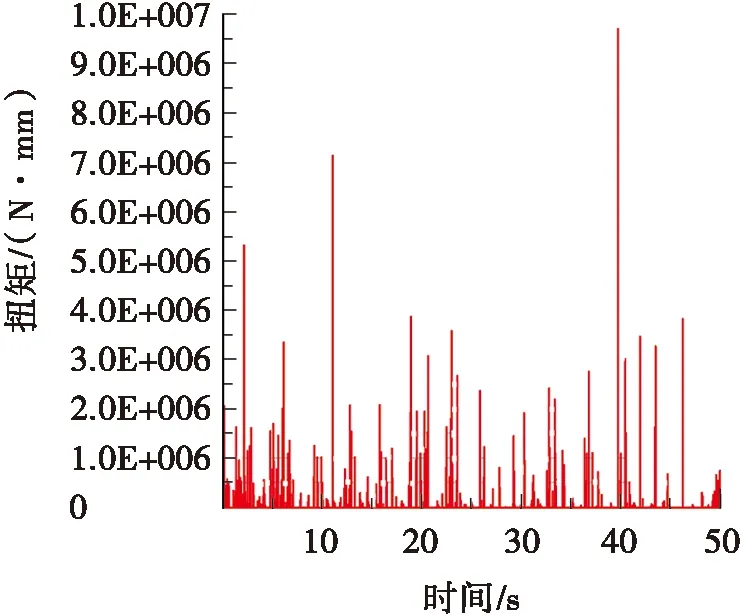
(c) 電機3
機器人的行星輪由驅動電機驅動內傳動軸與齒輪箱至各行星輪,其單側行星輪電機轉矩變化如圖9所示。圖9a、圖9b和圖9c的轉矩變化較為規律,每個行星輪的轉矩變化集中在5個時間范圍內,驗證了行星輪做行星運動翻越樓梯時,由于每一次落點位置的不同,其所需轉矩的大小也不同。
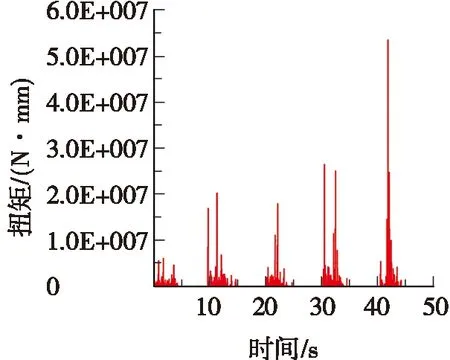
(a) 電機5
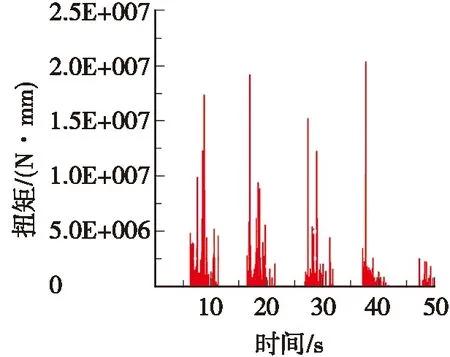
(b) 電機6
(c) 電機7
通過分析Adams軟件中驅動電機的仿真數據結果,驗證了機器人爬樓過程中搖臂輪組的被動搖臂運動與行星輪組的主動翻轉的爬樓方式,同時可根據各電機轉矩峰值的仿真數據設計控制方案,且能對電機型號進行確定。
4 物理樣機試驗驗證
物理樣機驗證爬樓機器人的爬樓越障性能以及機動性,選擇臺階高度×臺階寬度為150 mm×300 mm

圖10 物理樣機模型及越障試驗圖
的樓梯進行物理樣機爬樓試驗,如圖10所示。從圖10中可以看出:機器人的前驅搖臂輪組在接觸到障礙時,能夠被動搖臂使得輪組適應障礙爬行。試驗過程中機器人可以實現連續爬樓,且在爬樓過程中未出現輪組與樓梯干涉、傾翻失穩的情況。爬樓機器人在應對生活中常見的障礙、樓梯以及平地運動時,靈活性強,爬樓越障性能較為突出,在面對一般復雜的道路環境時具有較強的適應性。
5 結論
(1)設計了一款搖臂結構與行星結構相結合的爬樓越障機器人,實現了連續攀爬多級臺階、樓梯、斜坡以及崎嶇地形,提高了輪式機器人的多地形適應能力。
(2)設計搖臂輪組采用被動方式,行星輪采用主動方式自動適應并貼合地形表面,實現了爬樓過程機器人質心變化平滑,提高了爬樓越障的穩定性。
(3)采用麥克納姆全向輪作為機器人搖臂輪組和行星輪組車輪,克服了多輪組同時運動時阻力大、靈活性低的問題,實現了零半徑自旋和全向橫移,提高了機器人轉向和移動效率。
(4)設計的爬樓越障機器人能夠適應5種不同尺寸樓梯,載質量10 kg,13級尺寸為150 mm×300 mm的連續臺階通過時間為50 s,滿足爬樓機器人的性能要求。