改進LADRC的儲能逆變器直流母線電壓控制
2021-01-29 12:45:18韓永強徐明忻孫永輝趙立軍楊路勇
電力系統及其自動化學報 2021年1期
關鍵詞:系統
韓永強,徐明忻,孫 碣,孫永輝,趙立軍,楊路勇
(1.國網內蒙古東部電力有限公司經濟技術研究院,呼和浩特 010020;2.天津理工大學電氣電子工程學院,天津 300384)
近年來,隨著新能源發電技術的不斷發展[1-2],更穩定、更安全的能量儲備措施顯得至關重要。因此,把儲能系統進行并網,提高系統的安全穩定性是當前及未來發展的一種趨勢。
并網逆變器是實現DC-AC轉換、連接系統和電網的核心器件[3-4],它們廣泛應用于風力發電、光伏發電和儲能并網系統等[5]。在儲能并網的大裝機容量系統中,能量的傳輸、功率的平衡、直流母線電壓的穩定是系統并網的關鍵環節。對于儲能系統,傳統的控制方法為內外環都是比例積分PI(propor?tional integral)控制器的雙閉環控制,外環通過PI控制器控制直流母線電壓,內環采用PI控制器跟蹤外環的輸出命令。當然,實際工況的運行受控制方式的影響極大,例如當系統與電網發生諧波共振時,會產生諧波交互作用,不利于系統的穩定,這時傳統的控制方式已明顯不足[6]。因此,有必要對傳統的控制方法進行改進,減少對電網的干擾,以確保并網電流和直流側母線電壓的穩定。傳統PI控制方法是當前實際工程應用比較廣泛的,并取得了一定的效果,但對現在越來越多的大時延、多變量的控制系統來說,控制效果也并不是很明顯。
為此,中國學者韓京清[7-8]提出了一種自抗擾控制技術。自抗擾控制器的核心是ESO,針對ESO的研究是目前的重要內容。文獻[9-10]分別對線性自抗擾控制技術的收斂性和穩定性進行了分析;文獻[11]從頻域角度出發,分析了LESO的動態誤差估計能力;文獻[12]對三階的LADRC進行了理論分析和驗證。在文獻[13]中,高志強教授簡化了非線性自抗擾控制器的結構,提出了一種線性自抗擾控制方法。文獻[14]研究了基于LADRC的微網運行控制;文獻[15]研究了ADRC在解耦控制中的應用。然而,隨著工業的發展,傳統LADRC也顯示出了一些不足,在文獻[16]中,LESO對擾動的觀測隨著頻率的升高受噪聲影響極大,影響了控制器的性能,對直流母線電壓的穩定也有負面作用。因此,為了改善傳統控制方法的不足,提高系統的魯棒性和適應性,以及直流母線電壓的控制性能,對傳統的控制方法進行改進至關重要。
本文以超級電容儲能并網逆變器直流母線電壓為研究對象[17]。首先介紹了儲能并網逆變器的建模過程,在分析傳統LADRC控制方法的基礎上,設計了基于比例微分的改進型二階LADRC作為電壓外環控制器。然后,比較分析了儲能并網逆變器在改進LADRC和傳統LADRC控制下的動態過程和抗擾性能。最后,通過Matlab∕Simulink仿真驗證了本文所設計控制策略的有效性。
1 儲能并網逆變器LADRC的結構設計
1.1 儲能逆變器的數學建模
儲能系統網側逆變器控制結構如圖1所示。
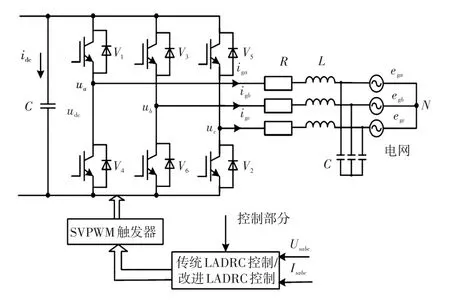
圖1 儲能系統網側逆變器控制結構Fig.1 Control structure of grid-side inverter of energy-storage system
圖1中:udc、idc為直流側母線電壓、電流;R、L、C為濾波電感內阻、濾波電感及濾波電容;ega、egb、egc為電網電壓;iga、igb、igc為電網電流;Usabc、Isabc為逆變器側的三相電壓、電流。并網逆變器控制結構主要有兩部分,一部分為空間矢量脈寬調制SVPWM(space vector pulse width modulation)硬件層部分,另一部分為控制層部分。
根據圖1可得儲能系統網側逆變器在dq旋轉坐標系下[18]的數學模型為
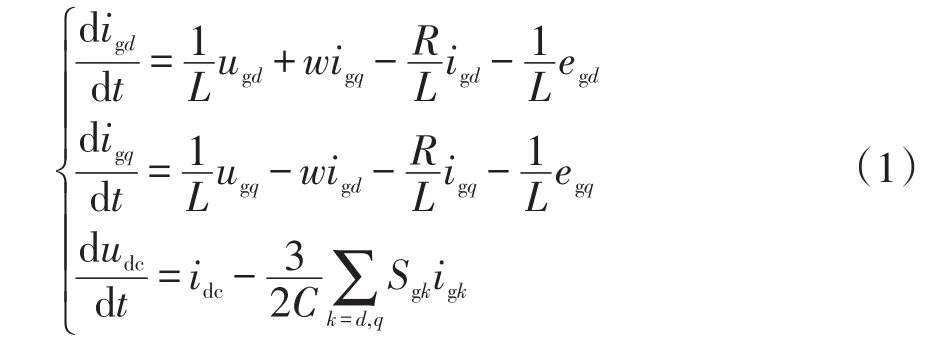
式中:egd、egq分別為電網電壓在d、q軸上的分量;ugd、ugq分別為網側逆變器輸出的電壓在d、q軸上的分量;igd、igq分別為網側電流在d、q軸上的分量;w為系統的基波頻率;Sgk為系統開關函數在dq軸上的分量。
對式(1)進行化簡可以得到:
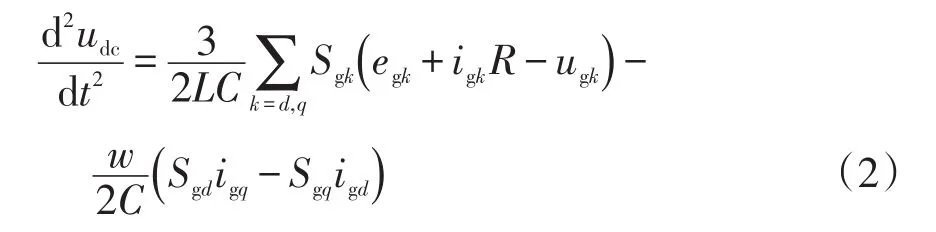
由式(2)可知,在dq旋轉坐標系下,儲能并網逆變器是一個多變量、強耦合的復雜系統,故在通常情況下,采用傳統的控制方式進行直流母線電壓的控制一般都難以滿足實際的要求。
1.2 傳統LADRC的結構設計
傳統二階LADRC是由三階LESO、線性跟蹤微分器LTD(linear tracking differentiator)及線性誤差反饋 LSEF(linear state error feedback)控制率組成的[19]。在LADRC設計中,TD一般不進行應用。
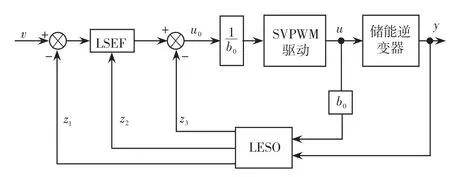
圖2 傳統LADRC整體控制結構Fig.2 Traditional LADRC overall control structure
圖2中:v為系統的參考輸入;y為系統的參考輸出;b0為控制增益;u為控制量;z1,z2,z3為三階LESO的3個狀態變量。
加入擴張狀態,可以將式(2)中的微分方程寫成式(3)所示的狀態空間形式。
式中:b0=3∕(2LC);x1,x2為母線電壓及其微分;x3為LESO中擴張出來的狀態變量;f為系統的總和擾動,h為f的微分。總和擾動的模型為
根據式(3)可建立如下三階LESO為
式中:β1、β2、β3為觀測器的系數。
取系統的控制律為

設PD控制律為

式中:kp和kd為比例和微分控制增益。選取合適的比例微分增益系數可使系統穩定。
根據極點配置,將式(5)的極點配置在觀測器的帶寬ω0上,即:

則有:

根據參考文獻[8],采用線性PD控制的控制器,n+1階LESO對應的控制器經參數化可得閉環系統特征多項式為

式中:kp、kd1、…、kdn-1為需要設計的控制器增益;wc為控制器的帶寬,通過上述關系,確定wc的大小就可以得到控制器的比例及微分增益。根據式(10)可得三階LESO對應PD控制器的增益為

因此,經過參數化,二階LADRC的參數可簡化為觀測器帶寬w0和控制器帶寬wc,w0和wc的選取直接影響LADRC的性能。
2 基于比例微分的改進型LADRC結構設計
在傳統二階LADRC中,LESO是線性自抗擾控制技術的核心,對LESO的設計和改良對整個系統的控制都起著至關重要的作用。
2.1 傳統三階LESO的設計
根據式(5)和(9)可得Z1、Z2、Z3的傳遞函數為
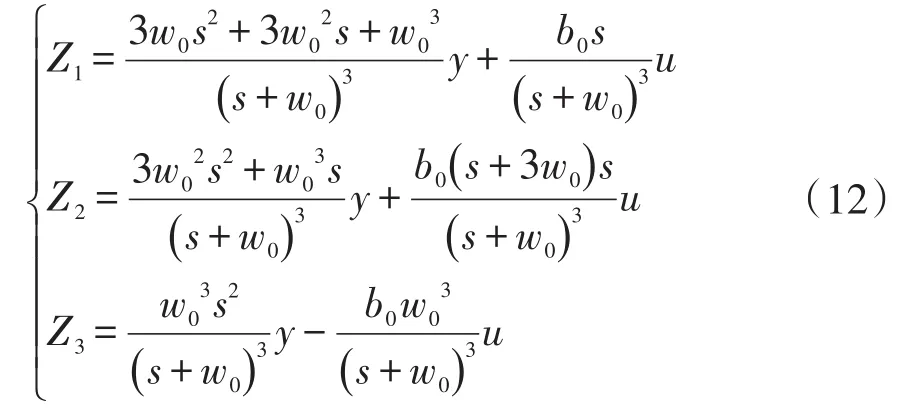
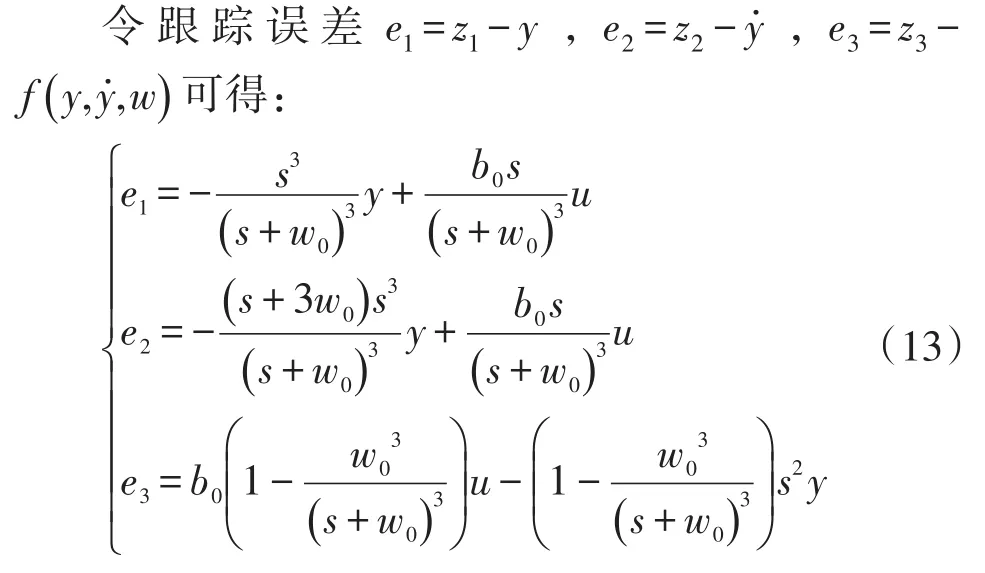
考慮到分析典型性,y、u均取幅值為K的階躍信號y(s)=K∕s,u(s)=K∕s,可得穩態誤差為

上式表明,LESO具有很好的收斂性和無差估計能力。
下面進一步分析其動態跟蹤過程,當b0=0時,式(12)中的Z1對階躍信號y()s=K∕s的響應為

進行反拉氏變換得:


根據式(17),w0不會影響超調量的大小,但會影響LESO的跟蹤速度,w0越大,系統響應越快。因此,為了提高跟蹤速度,應該更可能地提高w0。但是在實際系統中w0的大小受觀測噪聲的限制,w0的增大也會使得觀測噪聲放大,從而會影響整個控制器的控制性能,所以對傳統LADRC進行改進,使得w0在增大時,系統所受觀測噪聲的影響比較小是很有必要的。
2.2 改進三階LESO的設計
根據式(12)和式(13)可得三階LESO的擾動觀測傳遞函數:

?(s)為三階系統,由于三階系統的理論分析過于復雜,另一方面又由于其頻率特性在中低頻段與標準二階系統類似,故可以把三階系統近似等效為二階系統進行分析[20]:

?(s)的特性決定了LESO對擾動的觀測效果,作為二階系統,可以分析?(s)在時域上存在響應速度與超調量之間的矛盾;在頻域上存在相位滯后、隨著頻率的增大幅值衰減的特點,這些特性都說明了傳統LESO的擾動觀測性能是有缺陷的。
根據式(19)與標準的二階系統進行對比可知:

式中:wn為標準二階系統的角頻率;ζ為阻尼比。
在二階系統中,時間、頻率響應主要取決于wn和ζ。由式(20)可知,wn和ζ這兩個指標的變化影響著β1、β2、β3三個增益的變化,而其中β3的增益變化可以同時對wn和ζ起作用。簡單來說,三個參數中,β3的變化對系統性能的影響是最大的。
通過上述的推導與簡單分析可知,傳統LESO的觀測結構類似于標準的二階系統,結構上也存在著一些不足,導致擾動頻率增加時,擾動的觀測性會越來越差。本文通過對傳統LESO的觀測增益系數β3進行改進,提出一種基于比例微分的改進型LESO,可以有效地降低擾動觀測幅值的下降和相位的滯后程度,提高線性自抗擾控制器的抗擾能力。改進的公式如下:

式中,βa、βb為比例微分系數,改進后的β3包含比例微分環節。擾動觀測傳遞函數可以表示為

式(22)和式(18)相比,閉環系統上最明顯的變化就是增加了一個零點。從時域的角度來說,零點的作用是為了減小峰值時間,提高系統的響應速度;從頻域的角度來說相當于串聯了一個超前網絡,降低了幅值下降和相位滯后的程度,提高系統的穩定性。
由圖3可知,中低頻段帶寬和相位特性隨著頻率的升高變化不明顯,高頻處的指標衰減能力明顯得到減緩。傳統LESO的控制方法對擾動的觀測能力隨著擾動頻率的增加下降很明顯,相比于傳統LE?SO,改進LESO對擾動的觀測能力有所提高,減少了幅值下降的幅度和相位滯后的程度,提高了系統的穩定性。從而證明了改進LESO的可行性和有效性。
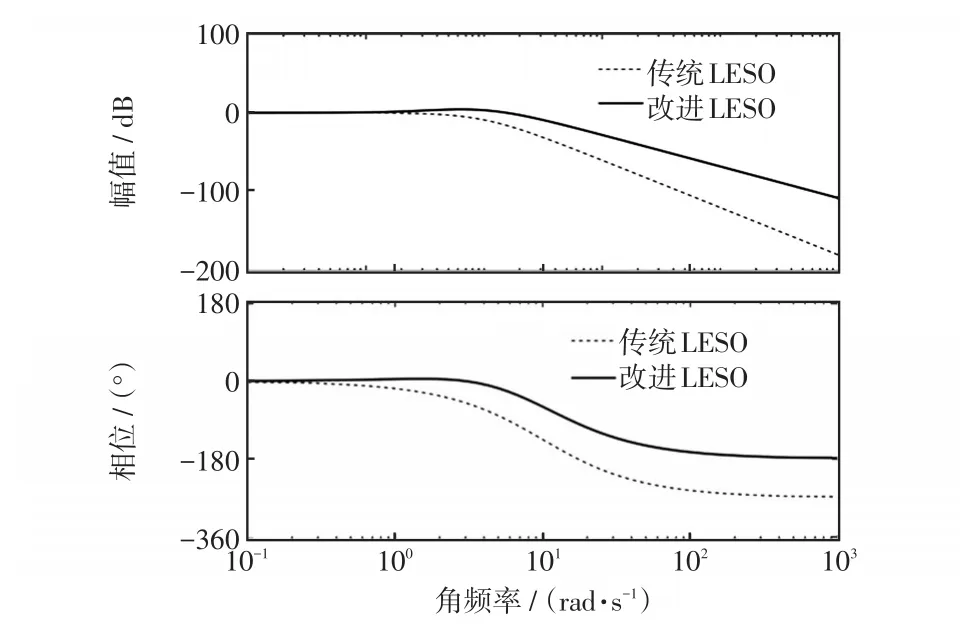
圖3 傳統LESO與改進LESO擾動傳遞函數的幅、相頻特性Fig.3 Amplitude-and phase-frequency characteristics of traditional LESO and improved LESO isturbance transfer functions
2.3 改進LADRC的設計
根據式(6)、(22)可得改進LADRC控制系統結構圖如下:
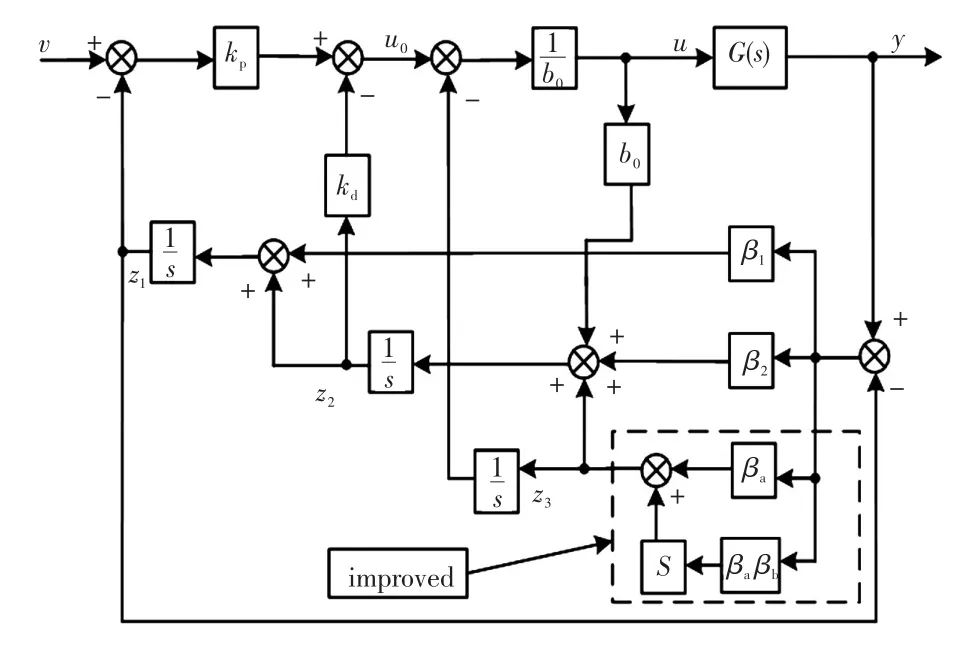
圖4 改進LADRC控制系統結構Fig.4 Structure of improved LADRC control system
根據式(12)、(21)可得改進后的Z1、Z2、Z3的傳遞函數為
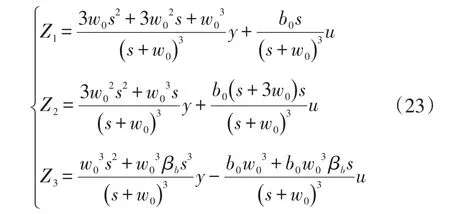
結合式(6)、(7)、(11)可得:

把式(23)代入式(24)可得:

式中,
根據式(5),可將被控對象記為

聯立式(25)和(26)可簡化改進LADRC控制系統,如圖5所示。
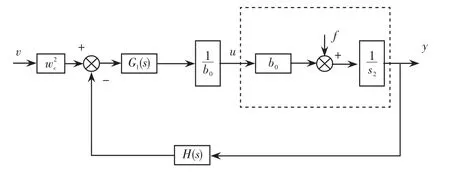
圖5 改進LADRC簡化系統結構Fig.5 Simplified structure of improved LADRC system
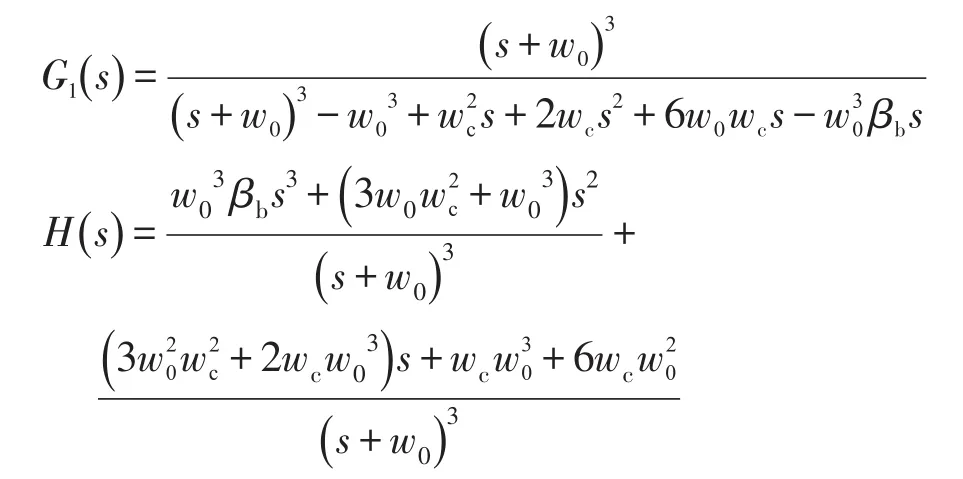
根據圖5由疊加定理可得系統的閉環傳遞函數為

由式(27)可知,系統的輸出由跟蹤項和擾動項組成,當忽略擾動項時,可以通過調整控制器的帶寬wc和觀測器的帶寬w0來實現系統對參考輸入的快速無超調跟蹤。
3 改進型LADRC在儲能系統中的性能分析
3.1 改進LADRC在儲能系統中的抗擾跟蹤性分析
由式(27)可知,擾動項的影響與控制器的帶寬wc和觀測器的帶寬w0都有關。選取w0=100,wc=0.1、1、10、20,可得其頻率特性曲線圖如圖6所示;取wc=100,w0=0.1、1、10、20,可得其頻率特性曲線如圖7所示。
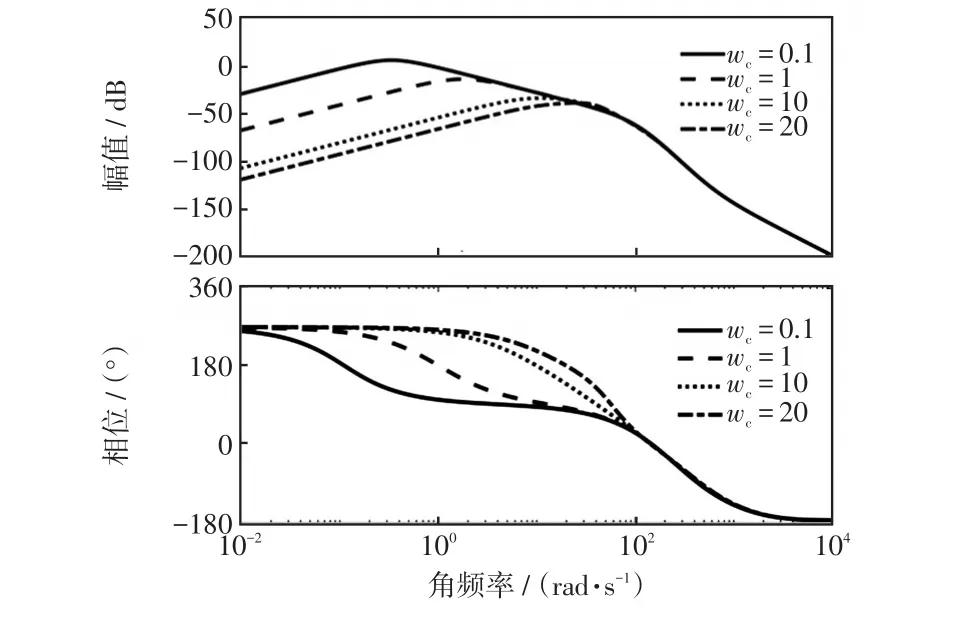
圖6 擾動頻率特性(wc改變)Fig.6 Frequency characteristics under disturbance(whenwcchanges)
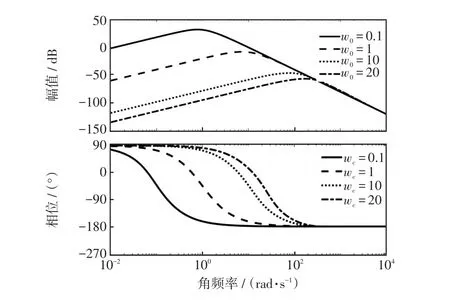
圖7 擾動頻率特性(w0改變)Fig.7 Frequency characteristics under disturbance(whenw0changes)
由上述兩圖擾動頻率特性曲線可知,增加wc、w0可使得擾動增益減小,系統抗擾能力增強。
一般地,在實際儲能并網系統中,對于并網逆變器而言,擾動主要來自于網側(負載側)電流,基于電網電流前饋控制策略可以有效抑制擾動對并網電壓控制的影響[21-22]。下面主要分析改進LADRC的控制器帶寬wc和觀測器帶寬w0對實際儲能并網系統跟蹤特性和抗電網電壓擾動特性的影響。
由圖5可得實際儲能并網逆變器控制系統結構,如圖8所示。
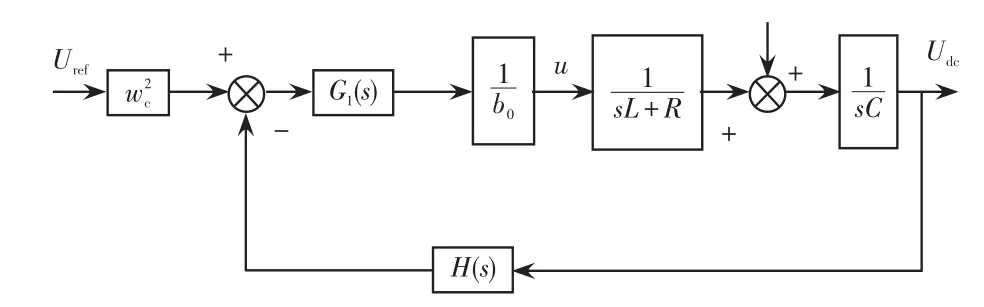
圖8 改進LADRC儲能并網逆變器整體系統結構Fig.8 Improved overall system structure of LADRC energy-storage grid-connected inverter
由圖8得被控系統輸出的直流母線電壓傳遞函數:
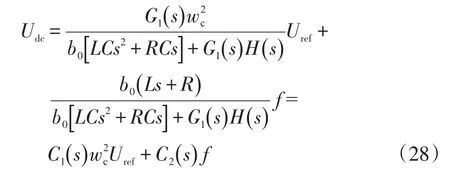
式中:Udc、Uref、f分別為儲能并網逆變器系統的直流母線電壓、系統輸出直流母線電壓的參考值以及系統所受的電網電壓擾動;C1(s)為儲能并網逆變器系統輸出直流母線電壓參考值Uref到系統實際輸出電壓值Udc的傳遞函數,即實現并網逆變器對系統輸出電壓的快速跟蹤性能(跟蹤性);C2(s)為系統所受的電網電壓擾動f到系統實際輸出電壓值Udc的傳遞函數,即實現并網逆變器維持系統直流母線電壓的穩定性能(抗擾性)。
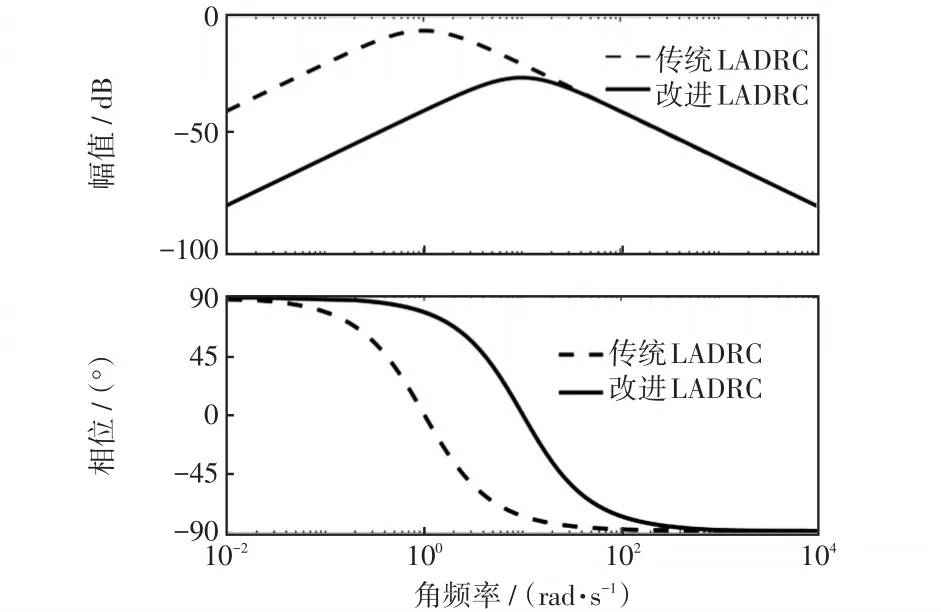
圖9 改進LADRC與傳統LADRC在實際儲能并網逆變器系統中的抗擾幅相特性曲線Fig.9 Amplitude and phase characteristic curves of improved LADRC and traditional LADRC in actual energy-storage grid-connected inverter system
由圖9可知,改進LADRC與傳統LADRC相比,改進LADRC控制在實際儲能并網系統受到擾動下幅值的變化幅度明顯低于傳統LADRC,抗擾能力更強。
3.2 改進LADRC在儲能并網系統中的穩定性分析
聯立式(26)可得:

根據式(29)可得系統的閉環傳遞函數為

式中:
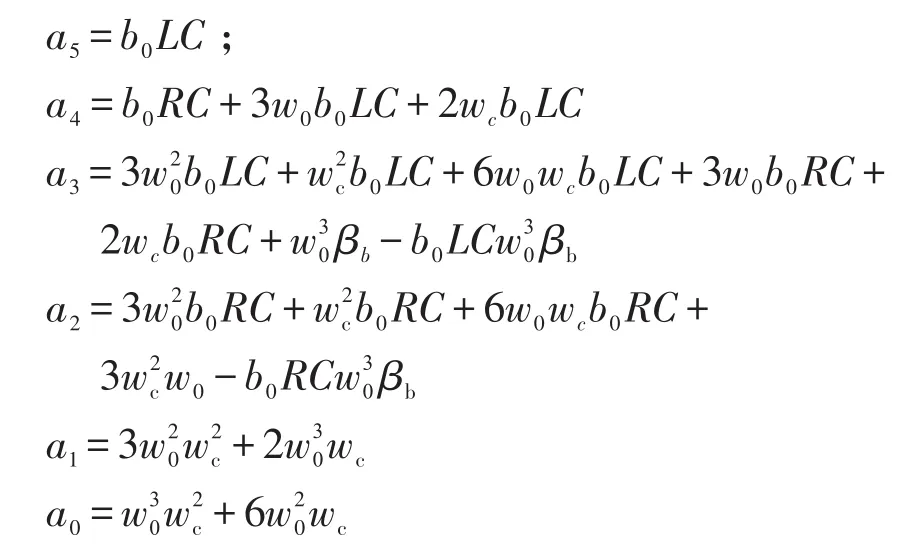
由于控制器帶寬wc和觀測器帶寬w0都為正,且由表1、表2中的參數知,ai>0( )i=0,1,2,3,4,5。
由李納德-戚帕特穩定性判據知,系統保持穩定的充要條件是其奇數階的郝爾維茨行列式為正,即Δ3>0,Δ5>0。綜合式(30)的各項系數與表1、表2中的各項參數可知:
故儲能并網逆變器系統保持穩定。
4 仿真分析
為了驗證本文所設計控制策略的有效性,在Matlab∕Simulink中建立了超級電容儲能系統并網的仿真模型。超級電容儲能系統網側和控制器的參數分別如下:
針對改進LADRC與傳統LADRC兩種不同的控制方式,設計了超級電容儲能系統的網側故障,針對網側電壓跌落程度的大小分別進行了對稱和不對稱故障的仿真分析[23-24]。模擬故障條件如下:

表1 超級電容儲能逆變器參數Tab.1 Parameters of super capacitor energy-storage inverter
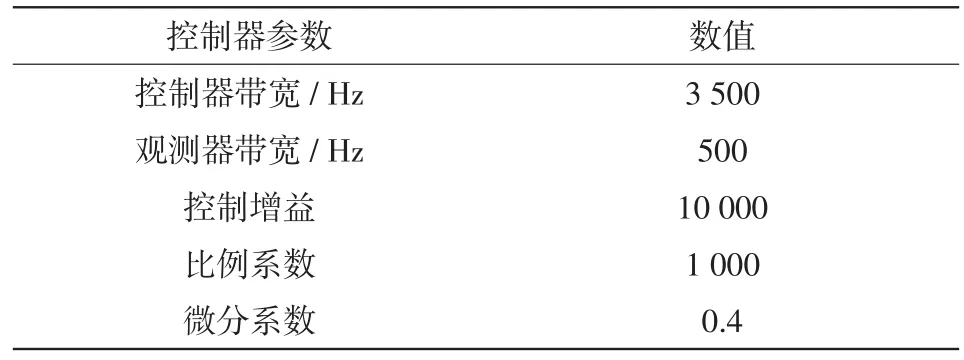
表2 控制器參數Tab.2 Controller parameters
(a)網側電壓對稱跌落30%,在0.3 s處跌落,在0.7 s處恢復;
(b)網側電壓不對稱跌落30%,在0.3 s處跌落,在0.7 s處恢復;
(c)網側電壓對稱跌落60%,在0.3 s處跌落,在0.7 s處恢復;
(d)網側電壓不對稱跌落60%,在0.3 s處跌落,在0.7 s處恢復。
1)工況(a)
從圖10中可以看到,傳統LADRC控制的直流母線電壓在低壓穿越0.7 p.u.期間波動范圍為0.975 p.u.~1.022 p.u.,而改進LADRC控制下的直流母線電壓波動范圍為0.996 p.u.~1.008 p.u.,并且能快速地達到穩定狀態1.0 p.u.。相比之下,改進LADRC控制在擾動狀況下對直流母線電壓的穩定有更好的控制效果,表明改進的LADRC具有較好的抗干擾性能,更適合于實際系統的應用。
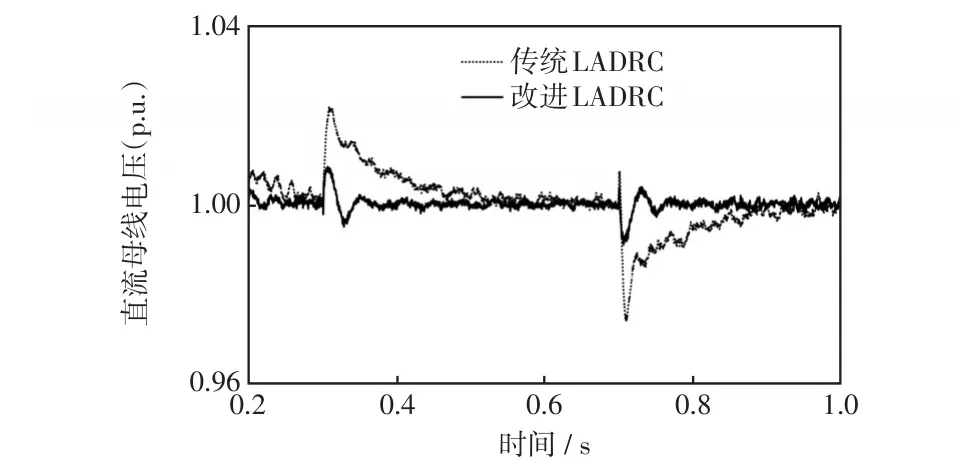
圖10 直流母線電壓在網側電壓對稱跌落30%的動態響應Fig.10 Dynamic response of DC bus voltage to 30% symmetrical drop in grid-side voltage
2)工況(b)
從圖11中可以看到,傳統LADRC控制的直流母線電壓在低壓穿越0.7 p.u.期間波動范圍為0.994 p.u.~1.013 p.u.,而改進LADRC控制下的直流母線電壓波動范圍為0.996 p.u.~1.008 p.u.,并且能快速地達到穩定狀態1.0 p.u.。與跌落程度相同的對稱故障相比,不對稱故障在直流側母線電壓的波動范圍上有明顯減小,但在故障期間波動的時間持續比較長,不易系統穩定。相比之下,無論是哪一種故障,改進的LADRC控制在擾動狀況下對直流母線電壓的穩定有更好的控制效果。
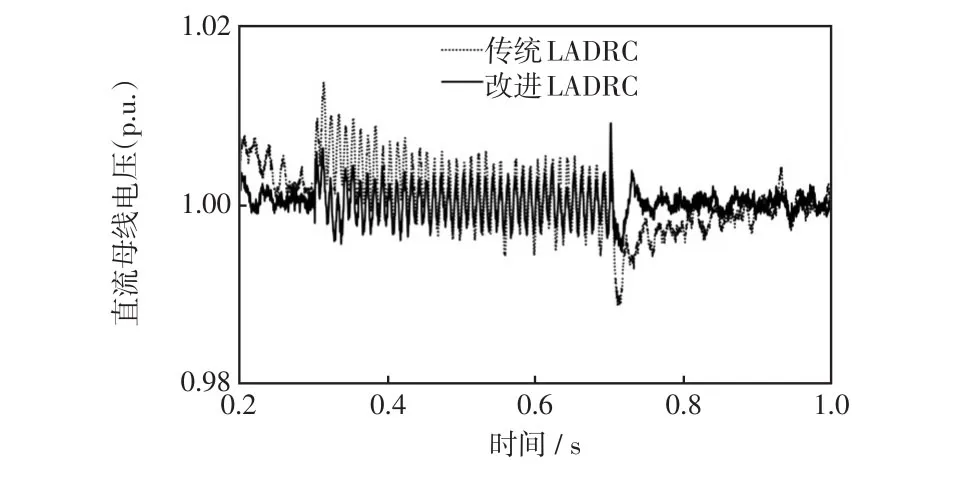
圖11 直流側母線電壓在網側電壓不對稱跌落30%的動態響應Fig.11 Dynamic response of DC-side bus voltage to 30% asymmetrical drop in grid-side voltage
3)工況(c)
從圖12中可以看到,傳統LADRC控制的直流母線電壓在低壓穿越0.4 p.u.期間波動范圍為0.931 p.u.~1.061 p.u.,而改進LADRC控制下的母線電壓波動范圍為0.970 p.u.~1.027 p.u.,并且能快速地達到穩定狀態1.0 p.u.。相比之下,改進的LADRC控制在擾動狀況下對直流母線電壓的穩定有更好的控制效果。與工況(a)網側電壓對稱跌落30%相比,直流側母線電壓的波動范圍明顯變大,表明改進的LADRC具有較好的抗干擾性能。由此可知:并網側電壓的對稱跌落程度影響著直流側母線電壓的波動范圍。
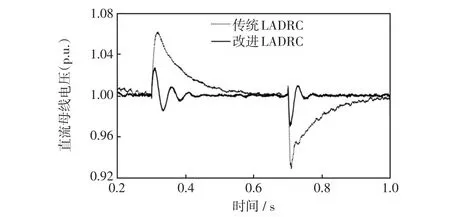
圖12 直流側母線電壓在網側電壓對稱跌落60%的動態響應Fig.12 Dynamic response of DC-side bus voltage to 60% symmetrical drop in grid-side voltage
4)工況(d)
從圖13中可以看到,傳統LADRC控制的直流母線電壓在低壓穿越0.4 p.u.期間波動范圍為0.990 p.u.~ 1.029 p.u.,而改進LADRC控制下的直流母線電壓波動范圍為0.990 p.u.~1.020 p.u.,并且能快速地達到穩定狀態1.0 p.u.。相比之下,改進的LADRC控制在擾動狀況下對直流母線電壓的穩定有更好的控制效果。同時也能說明改進LADRC在不對稱故障下也具有較好的控制效果。
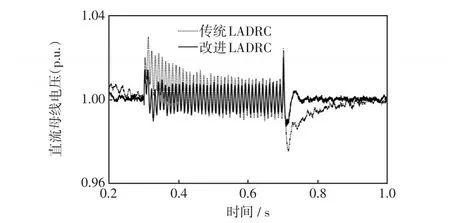
圖13 直流側母線電壓在網側電壓不對稱跌落60%的動態響應Fig.13 Dynamic response of DC-side bus voltage to 60% asymmetrical drop in grid-side voltage
5 結語
儲能并網逆變器直流側母線電壓控制是儲能系統實現穩定并網中的一個重要問題,控制性能的優劣直接決定了儲能并網電能質量的好壞及直流側母線電壓的穩定。本文以儲能并網逆變器直流側母線電壓為控制對象,針對電網電壓波動對直流側母線電壓的影響,提出了一種基于比例微分的改進型LADRC直流側母線電壓的控制方法。在傳統LESO結構的基礎上,把總和擾動的觀測增益系數換成一個比例微分環節,隨著頻率的升高,有效地降低了擾動觀測幅值的下降和相位的滯后程度,增加了LESO的觀測帶寬,達到了對總擾動進行快速跟蹤補償的效果,同時也提高了線性自抗擾控制器的抗擾能力。本文通過在網側電壓跌落30%和60%的情況下分別進行了對稱和不對稱網側故障的仿真分析,證明了本文所設計的控制器具有比傳統控制器更好的穩定直流側母線電壓的控制性能。
本文通過把傳統LADRC進行改進,明顯提高了控制器的控制性能,但同時也會在高頻段產生噪聲,有待于進一步地研究。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
