復(fù)合連桿機(jī)構(gòu)輸出運(yùn)動(dòng)與動(dòng)力學(xué)分析*
2021-02-07 09:07:04陸鵬飛胡昌軍
南方農(nóng)機(jī) 2021年3期
陸鵬飛,胡昌軍
(宿遷學(xué)院機(jī)電工程學(xué)院,江蘇 宿遷 223800)
隨著科學(xué)技術(shù)的進(jìn)步,機(jī)械設(shè)備的小型化以及機(jī)械產(chǎn)品的微型化對(duì)機(jī)械零件的加工方法提出了更高的要求,各種機(jī)構(gòu)在這些設(shè)備中起到了關(guān)鍵作用。為了獲得更好加工性能,對(duì)構(gòu)成這些設(shè)備的機(jī)構(gòu)進(jìn)行運(yùn)動(dòng)學(xué)和動(dòng)力學(xué)分析,是設(shè)計(jì)過程中極其重要的環(huán)節(jié)。 近年來,不少學(xué)者對(duì)機(jī)器人中用到的機(jī)構(gòu)進(jìn)行了運(yùn)動(dòng)及動(dòng)力學(xué)分析[1-4],這些工作提升了機(jī)器人在工業(yè)中的應(yīng)用范圍和性能。 Dongkyu Lee 等人[5]、王軍等人[6]、Saurav Agarwal 等人[7]分別從路徑生成、參數(shù)化設(shè)計(jì)以及二階結(jié)構(gòu)誤差等不同方面討論了機(jī)構(gòu)設(shè)計(jì)的方法,這些方法對(duì)于機(jī)構(gòu)在新型設(shè)備中的應(yīng)用設(shè)計(jì)具有很好的借鑒價(jià)值。文獻(xiàn)[8-16]從機(jī)構(gòu)的運(yùn)動(dòng)學(xué)建模、優(yōu)化分析、控制學(xué)、神經(jīng)網(wǎng)絡(luò)等角度分析研究了機(jī)構(gòu)在不同設(shè)備領(lǐng)域的應(yīng)用,有一定的價(jià)值,但都或多或少存在不同程度的不足,比如其中有些模型過于復(fù)雜,不利于應(yīng)用推廣等。基于此,本文分析了一種基于平面六桿機(jī)構(gòu)的復(fù)合機(jī)構(gòu)輸出運(yùn)動(dòng)和動(dòng)力,討論了該機(jī)構(gòu)的輸出行程,建立了兩種不同情況時(shí)輸出行程的計(jì)算模型。
1 六桿機(jī)構(gòu)的基本架構(gòu)設(shè)計(jì)
筆者所設(shè)計(jì)六桿機(jī)構(gòu)的運(yùn)動(dòng)簡(jiǎn)圖如圖1 所示,該機(jī)構(gòu)相當(dāng)于由鉸鏈四桿機(jī)構(gòu)ABCE 和一個(gè)單移副四桿機(jī)構(gòu)組成,動(dòng)力由曲柄 AB 輸入,經(jīng)過中間桿件 BC、CE、CD 將運(yùn)動(dòng)和動(dòng)力輸出,輸出構(gòu)件D 在桿件CD 的驅(qū)動(dòng)下產(chǎn)生運(yùn)動(dòng)實(shí)現(xiàn)對(duì)工件的擠壓成形。
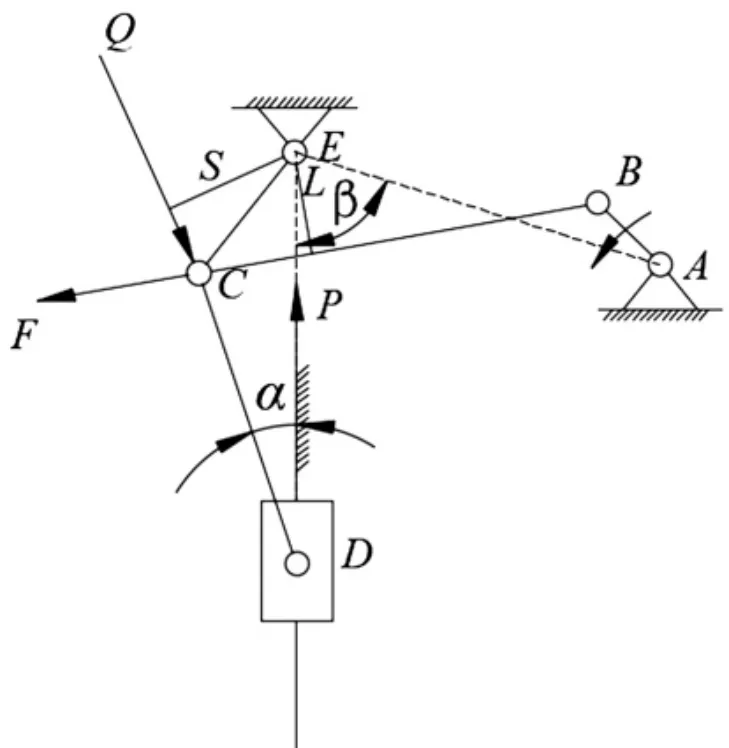
圖1 六桿機(jī)構(gòu)的運(yùn)動(dòng)簡(jiǎn)圖
2 六桿機(jī)構(gòu)中輸出構(gòu)件的輸出行程
如圖1 所示,AB、BC、CE 與機(jī)架組成的鉸鏈四桿機(jī)構(gòu)為雙曲柄機(jī)構(gòu)時(shí),CE 桿與CD 桿位于同一條直線且C 點(diǎn)在E 點(diǎn)下方,輸出構(gòu)件D 處于最低端D1,而 CE 桿與CD桿位于同一條直線且C 點(diǎn)在E 點(diǎn)上方,輸出構(gòu)件D 處于最頂端D2,D1D2的距離即這種情況下輸出構(gòu)件D 的最大輸出位移,大小為:

AB、BC、CE 與機(jī)架組成的鉸鏈四桿機(jī)構(gòu)為曲柄搖桿機(jī)構(gòu)時(shí),CE 不能繞機(jī)架轉(zhuǎn)整周,AB、BC 處于一條直線時(shí)為 D 點(diǎn)的可能最頂端,如圖 2(a)(b)所示,很明顯,圖 2(a)應(yīng)該是D 點(diǎn)處于最頂端的機(jī)構(gòu)位置。
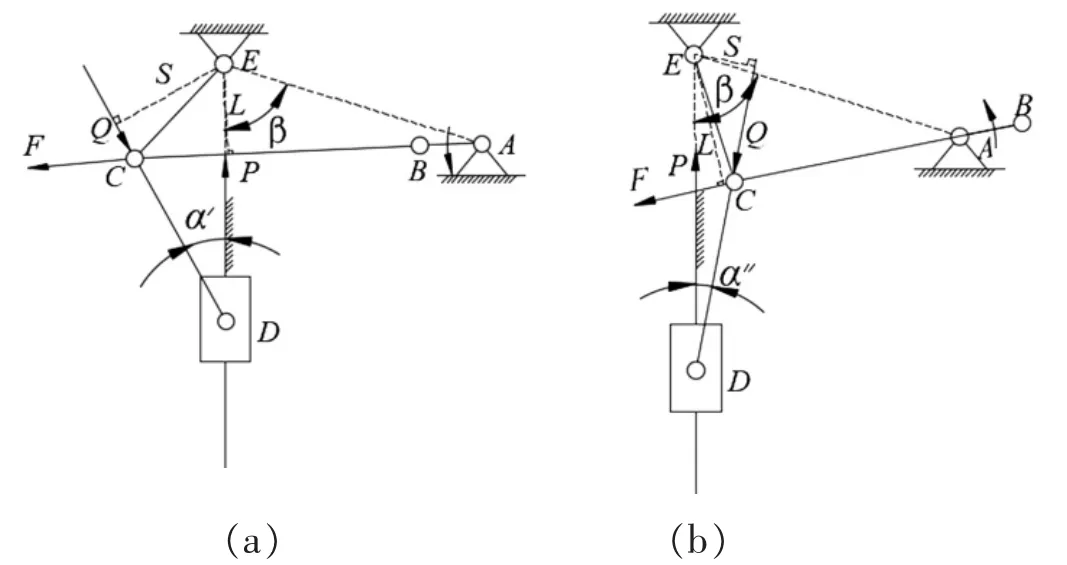
圖2 D 點(diǎn)可能最頂端的六桿機(jī)構(gòu)位置簡(jiǎn)圖
在圖 2(a)的⊿ACE 中:

由圖2 很容易得到:

D 點(diǎn)處于最底端時(shí):

輸出構(gòu)件D 的輸出位移D1D2可通過聯(lián)立式 (2)~式(5)得到的方程組解得結(jié)果。
3 六桿機(jī)構(gòu)的輸出力分析
該機(jī)構(gòu)中BC 桿和CD 桿均為二力桿,因此,C 點(diǎn)的受力情況如圖1 所示,桿BC 和桿CD 在C 點(diǎn)的作用力分別為F和Q,以桿CE 為研究對(duì)象,F(xiàn) 和Q 對(duì)E 點(diǎn)的合力矩為0 得:

以輸出構(gòu)件D 為研究對(duì)象得:
從式(8)可以看出,輸出構(gòu)件 D 的輸出力與 S、L、α 相關(guān),要想獲得所需的擠壓力可以通過改變這些參數(shù)的大小來實(shí)現(xiàn)。
4 六桿機(jī)構(gòu)的運(yùn)動(dòng)及動(dòng)力學(xué)仿真
4.1 機(jī)構(gòu)仿真模型的建立
取圖1 各桿件的長度分別為AB=50mm、AE=235mm、BC=255mm、CE=120mm、CD=135mm、β = 60°,將這些數(shù)據(jù)分別代入式(2)~式(5),并進(jìn)行求解,結(jié)果為:

打開ADAMS 軟件,依據(jù)上述各桿件的長度以及運(yùn)動(dòng)副的位置創(chuàng)建MARK 點(diǎn),再創(chuàng)建組成機(jī)構(gòu)的各桿件,為各桿件之間以及部分桿件與地面之間創(chuàng)建約束,則為圖1 所示壓力機(jī)主傳動(dòng)機(jī)構(gòu)創(chuàng)建的仿真模型如圖3 所示。
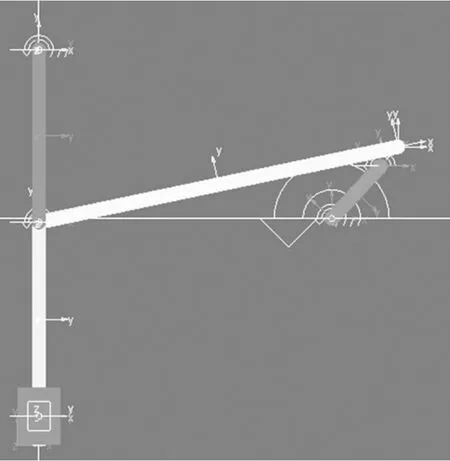
圖3 六桿動(dòng)機(jī)構(gòu)的仿真模型
4.2 機(jī)構(gòu)仿真分析
在AB 桿上施加驅(qū)動(dòng),設(shè)置仿真時(shí)間為55,仿真步數(shù)為100,對(duì)機(jī)構(gòu)進(jìn)行仿真。 得到輸出構(gòu)件D 的位移曲線如圖4 所示。
對(duì)圖4 的位移曲線進(jìn)行測(cè)量所得結(jié)果如表1 所示。

表1 測(cè)量位移曲線所得結(jié)果
由表1 可知,輸出構(gòu)件D 位移最大值為72.139 9,最小值為-19.982 6,因此,仿真得到的最大輸出位移D1D2=72.1399-(-19.982 6)= 92.122 5,該結(jié)果與前面計(jì)算所得式(9)的結(jié)果92.181 853 350 57 基本一致。
輸出構(gòu)件D 的速度曲線和加速度曲線分別如圖5、圖6 所示,從圖示仿真得到的輸出構(gòu)件D 速度、加速度隨時(shí)間變化的曲線可以看出,該六桿機(jī)構(gòu)不存在沖擊載荷,運(yùn)行情況穩(wěn)定。使用該機(jī)構(gòu)進(jìn)行工件的塑性擠壓成形具有非常理想的工作環(huán)境,有利于提高被加工工件的精度等級(jí)。
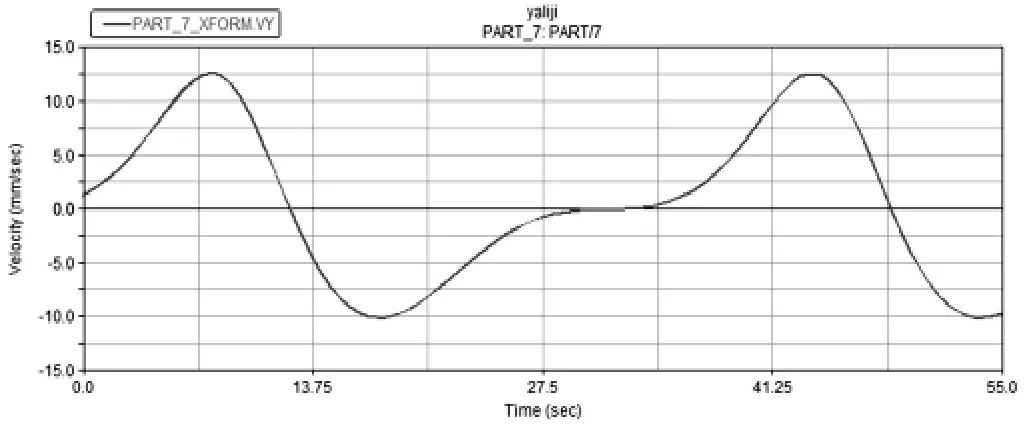
圖5 輸出構(gòu)件D 速度隨時(shí)間的變化曲線
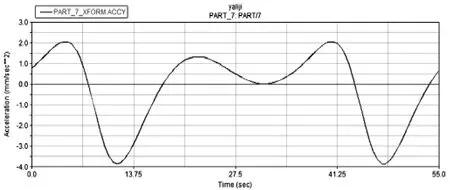
圖6 輸出構(gòu)件D 加速度隨時(shí)間的變化曲線
5 結(jié)論
文章分析了一種平面六桿機(jī)構(gòu)的運(yùn)動(dòng)和動(dòng)力,討論了輸出構(gòu)件的輸出行程,建立了輸出行程的計(jì)算模型。 第一種情況AB、BC、CE 與機(jī)架組成的鉸鏈四桿機(jī)構(gòu)為雙曲柄機(jī)構(gòu)時(shí)的輸出行程比較簡(jiǎn)單,直接就是CE 桿與CD 桿的長度和。 第二種情況的輸出行程可以通過所建立的模型求得,文章對(duì)該情況下的機(jī)構(gòu)輸出行程進(jìn)行了模型的仿真分析,仿真的結(jié)果與模型的結(jié)果完全相符。 機(jī)構(gòu)的速度和加速度仿真結(jié)果表明該六連桿機(jī)構(gòu)運(yùn)動(dòng)平穩(wěn)性好,為該機(jī)構(gòu)在機(jī)械設(shè)備中的應(yīng)用前景提供了有力的證據(jù)。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
民用飛機(jī)設(shè)計(jì)與研究(2020年4期)2021-01-21 09:15:02
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
電子制作(2018年18期)2018-11-14 01:48:24
山東工業(yè)技術(shù)(2016年15期)2016-12-01 05:31:22
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
核科學(xué)與工程(2015年4期)2015-09-26 11:59:03
中國中醫(yī)藥現(xiàn)代遠(yuǎn)程教育(2014年11期)2014-08-08 13:23:44
終身教育研究(2014年5期)2014-02-28 01:23:06
