下肢外骨骼創(chuàng)新仿生設(shè)計(jì)及承載性能分析
2021-02-12 10:03:54趙新華楊玉維鄭曉博
天津理工大學(xué)學(xué)報(bào) 2021年5期
趙 瀚,趙新華,楊玉維,李 彬,鄭曉博
(天津理工大學(xué) 天津市先進(jìn)機(jī)電系統(tǒng)設(shè)計(jì)與智能控制重點(diǎn)實(shí)驗(yàn)室,天津300384)
膝關(guān)節(jié)的骨性關(guān)節(jié)炎是一種常見于中老年人,尤其是較為肥胖的中老年人的疾病。隨著我國人口老齡化的趨勢不斷發(fā)展以及居民肥胖率的不斷上升,膝關(guān)節(jié)的骨性關(guān)節(jié)炎的發(fā)病率也在不斷攀升,預(yù)防和治療膝關(guān)節(jié)的骨性關(guān)節(jié)炎變得更為重要。膝關(guān)節(jié)的骨性關(guān)節(jié)炎的誘因主要有個(gè)體衰老、遺傳因素以及膝關(guān)節(jié)長時(shí)間受力過度。合理設(shè)計(jì)的下肢外骨骼可以減少膝關(guān)節(jié)載荷,使其受力保持在合理范圍進(jìn)而達(dá)到有效預(yù)防和治療膝關(guān)節(jié)的骨性關(guān)節(jié)炎的目的[1]。
下肢外骨骼可分為助力型外骨骼和康復(fù)型外骨骼。助力型外骨骼主要用來增強(qiáng)人體力量,輔助人負(fù)重行走,較為典型的就是伯克利下肢外骨骼(Berkeley lower extremity exoskeleton,BLEEX)[2-4],該外骨骼是一種助力型負(fù)重下肢外骨骼,其采用液壓驅(qū)動(dòng)增強(qiáng)單兵力量,提高單兵負(fù)重能力。混合輔助肢體(hybrid assistive leg,HAL)[5-6]也是一種助力型外骨骼,其采用盤式電機(jī)和諧波減速器作為驅(qū)動(dòng)機(jī)構(gòu),用于幫助腿部無力的使用者完成行走、爬樓等運(yùn)動(dòng)。哈爾濱工業(yè)大學(xué)開發(fā)的下肢助力外骨骼可負(fù)重30 kg[7]。康復(fù)型外骨骼主要用于對(duì)腦卒中和下肢損傷患者的康復(fù)訓(xùn)練。步態(tài)復(fù)建系統(tǒng)(Lokomat)懸掛式康復(fù)訓(xùn)練外骨骼系統(tǒng)[8-10],可以實(shí)現(xiàn)主動(dòng)訓(xùn)練與被動(dòng)訓(xùn)練。再行走(ReWalk)下肢支撐式外骨骼康復(fù)機(jī)器人[11],利用傳感器感知身體的重心變化而驅(qū)動(dòng)下肢行走。張佳帆等[12-13]研制的下肢外骨骼康復(fù)系統(tǒng),可以預(yù)判人體運(yùn)動(dòng)趨勢從而使外骨骼擬合下肢的運(yùn)動(dòng)。
上述下肢外骨骼大多考慮增強(qiáng)人體力量與輔助行走,不涉及外骨骼對(duì)人體膝關(guān)節(jié)所受的運(yùn)動(dòng)載荷的分承問題。為了實(shí)現(xiàn)外骨骼分承膝關(guān)節(jié)運(yùn)動(dòng)載荷,減少膝關(guān)節(jié)在人體行走過程中所受內(nèi)力的目標(biāo),本文設(shè)計(jì)了一種具有自適應(yīng)變剛度機(jī)制的下肢外骨骼,通過對(duì)外骨骼轉(zhuǎn)動(dòng)部分進(jìn)行動(dòng)力學(xué)分析和參數(shù)優(yōu)化,驗(yàn)證了下肢外骨骼設(shè)計(jì)的合理性,為今后下肢外骨骼的研發(fā)奠定基礎(chǔ)。
1 下肢外骨骼結(jié)構(gòu)設(shè)計(jì)
1.1 設(shè)計(jì)準(zhǔn)則與結(jié)構(gòu)設(shè)計(jì)
系統(tǒng)的結(jié)構(gòu)設(shè)計(jì)是系統(tǒng)發(fā)揮作用的前提,本膝關(guān)節(jié)外骨骼的結(jié)構(gòu)設(shè)計(jì)主要考慮以下幾個(gè)方面:
1)穿戴舒適性。在人體行走過程中由于腿部肌肉的伸縮會(huì)導(dǎo)致腿部直徑在步態(tài)周期內(nèi)有規(guī)律地變化,合理設(shè)計(jì)腿部人機(jī)交互裝置可以提高穿戴舒適度。
2)膝關(guān)節(jié)運(yùn)動(dòng)匹配包容性。人體的脛骨與股骨的接觸面在下肢屈伸的過程中既有滾動(dòng)又有滑動(dòng),這使得膝關(guān)節(jié)在矢狀面的轉(zhuǎn)動(dòng)瞬心會(huì)隨著下肢屈伸的角度而改變,膝關(guān)節(jié)轉(zhuǎn)動(dòng)瞬心呈J形曲線[1]。膝關(guān)節(jié)外骨骼設(shè)計(jì)需滿足外骨骼旋轉(zhuǎn)瞬心與膝關(guān)節(jié)瞬心有較高的擬合度,且需滿足因個(gè)體不同導(dǎo)致的膝關(guān)節(jié)幾何差異。
3)載荷傳遞和靈活運(yùn)動(dòng)的兼容性。人體在步態(tài)周期的不同階段對(duì)下肢外骨骼的承載需求不同,下肢外骨骼在支撐相具有較高的剛度,在擺動(dòng)相具有較低的剛度。
矢狀面是指將人體縱切為左右兩部分的切面,人體的基本面如圖1所示。人體在行走的過程中,膝關(guān)節(jié)主要在矢狀面內(nèi)做屈伸運(yùn)動(dòng),所以本下肢外骨骼的膝關(guān)節(jié)部分及踝關(guān)節(jié)部分均設(shè)計(jì)為只在矢狀面內(nèi)做旋轉(zhuǎn)運(yùn)動(dòng)的機(jī)構(gòu)。本下肢外骨骼主要包括分別附著在左右下肢的兩條機(jī)械腿,且左右對(duì)稱,所以下文主要對(duì)單側(cè)結(jié)構(gòu)進(jìn)行描述。圖2所示為下肢外骨骼結(jié)構(gòu),本文設(shè)計(jì)了一種帶有智能張緊功能的自適應(yīng)變剛度體外膝關(guān)節(jié)裝置[14],其中腰部固定裝置起固定智能張緊物理交互裝置的作用,防止整個(gè)機(jī)構(gòu)縱向下滑,使外骨骼穿戴在合理的位置。針對(duì)穿戴舒適性的需求,智能張緊物理交互裝置在人體行走的過程中通過張緊帶隨著腿部徑向尺寸的變化而伸縮從而提高穿戴的舒適度與穿戴時(shí)間長度。針對(duì)膝關(guān)節(jié)運(yùn)動(dòng)匹配包容性的要求,下肢外骨骼的膝關(guān)節(jié)轉(zhuǎn)動(dòng)部分采用5桿機(jī)構(gòu)變剛度膝關(guān)節(jié)裝置,在人體步態(tài)周期不同階段呈現(xiàn)不同剛度,以適應(yīng)人體對(duì)體外膝關(guān)節(jié)外骨骼承載與運(yùn)動(dòng)靈活性的需求。

圖1 人體的基本面Fig.1 Fundamental sections of the human body
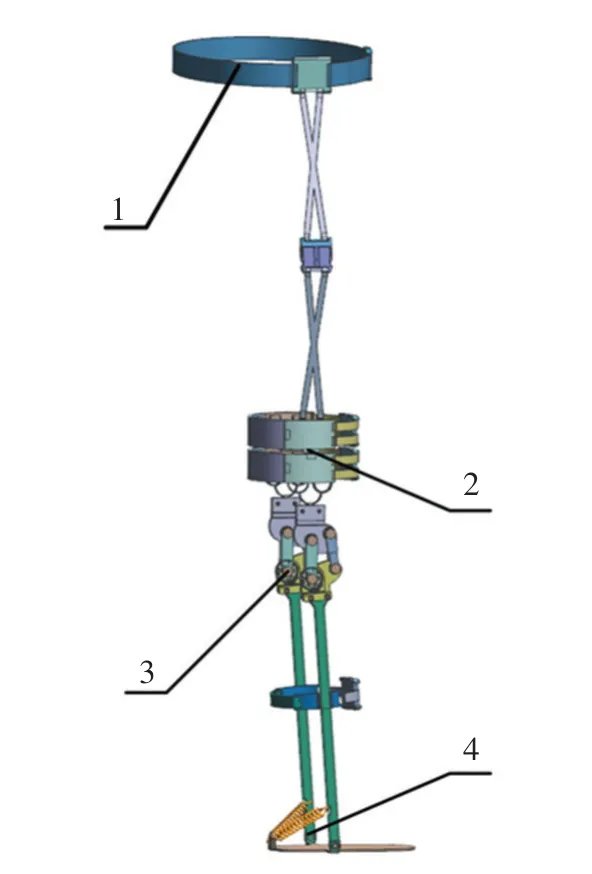
圖2 下肢外骨骼結(jié)構(gòu)Fig.2 Lower extremity exoskeletal structure
1.2 大腿智能張緊物理交互裝置
大腿智能張緊物理交互裝置如圖3所示,為了適應(yīng)人體大腿在股骨軸向方向上的直徑變化,智能張緊物理交互裝置中的大腿加強(qiáng)環(huán)板設(shè)計(jì)為上下兩部分,上下大腿加強(qiáng)環(huán)板上的張緊電機(jī)隨著感知的實(shí)時(shí)步態(tài)而旋轉(zhuǎn)帶動(dòng)張緊桿旋轉(zhuǎn),進(jìn)而使卷繞在張緊桿上的張緊線及張緊帶張緊或放松,張緊時(shí)增加人體與體外膝關(guān)節(jié)的接觸剛度,實(shí)現(xiàn)負(fù)載傳遞,松弛時(shí)降低軟組織上的壓力,提高穿戴的舒適度與穿戴時(shí)間長度。
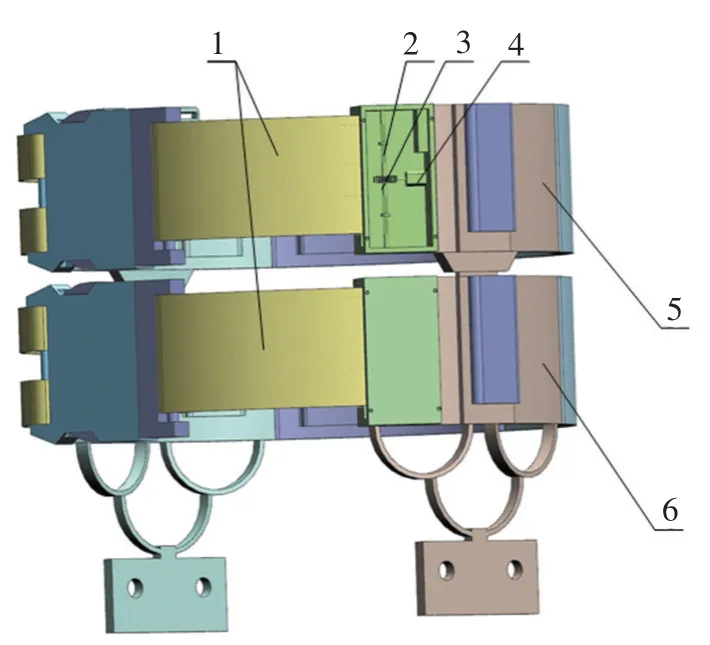
圖3 大腿智能張緊物理交互裝置Fig.3 Thigh smart tensioning physical interaction device
1.3 變剛度膝關(guān)節(jié)裝置
人體膝關(guān)節(jié)是人體最復(fù)雜的關(guān)節(jié)之一,膝關(guān)節(jié)在屈伸的過程中在矢狀面的轉(zhuǎn)動(dòng)瞬心呈J形曲線,傳統(tǒng)下肢外骨骼的膝關(guān)節(jié)轉(zhuǎn)動(dòng)副為單自由度鉸鏈,其與膝關(guān)節(jié)真實(shí)瞬心的擬合度較低,嚴(yán)重影響外骨骼穿戴的舒適度。優(yōu)化桿長后的4桿機(jī)構(gòu)可以擬合人體膝關(guān)節(jié)的理想瞬心J形曲線[15]。但對(duì)于桿長固定的4桿機(jī)構(gòu),其轉(zhuǎn)動(dòng)瞬心曲線也是固定的,無法適應(yīng)不同個(gè)體的膝關(guān)節(jié)尺寸差異。
變剛度膝關(guān)節(jié)裝置如圖4所示,在傳統(tǒng)4桿機(jī)構(gòu)的基礎(chǔ)上,下肢外骨骼的膝關(guān)節(jié)轉(zhuǎn)動(dòng)部分將其中一桿替換為兩個(gè)由移動(dòng)副連接且兩桿之間加入彈簧的桿件,膝關(guān)節(jié)轉(zhuǎn)動(dòng)部分可視為含有彈性移動(dòng)副的5桿機(jī)構(gòu),增大了外骨骼中膝關(guān)節(jié)部分的工作空間,使外骨骼實(shí)現(xiàn)對(duì)因個(gè)體不同導(dǎo)致的膝關(guān)節(jié)幾何差異與膝關(guān)節(jié)的輕微移動(dòng)補(bǔ)償,從而避免體外膝關(guān)節(jié)與人體膝關(guān)節(jié)間的非期望交互力的產(chǎn)生。此外,外骨骼的膝關(guān)節(jié)部分還采用了變剛度機(jī)制,在支撐相階段剎車塊制動(dòng)彈簧托盤,彈簧使前桿下端運(yùn)動(dòng)副剛度增大,此時(shí)外骨骼膝關(guān)節(jié)部分剛度增大,在擺動(dòng)相階段剎車塊遠(yuǎn)離彈簧托盤,前桿下端運(yùn)動(dòng)副剛度變?yōu)?,此時(shí)外骨骼中膝關(guān)節(jié)部分運(yùn)動(dòng)剛度減小。剎車塊的制動(dòng)或放松協(xié)同智能張緊裝置滿足人體在步態(tài)不同階段對(duì)下肢外骨骼的承載和關(guān)節(jié)靈活性的需求。
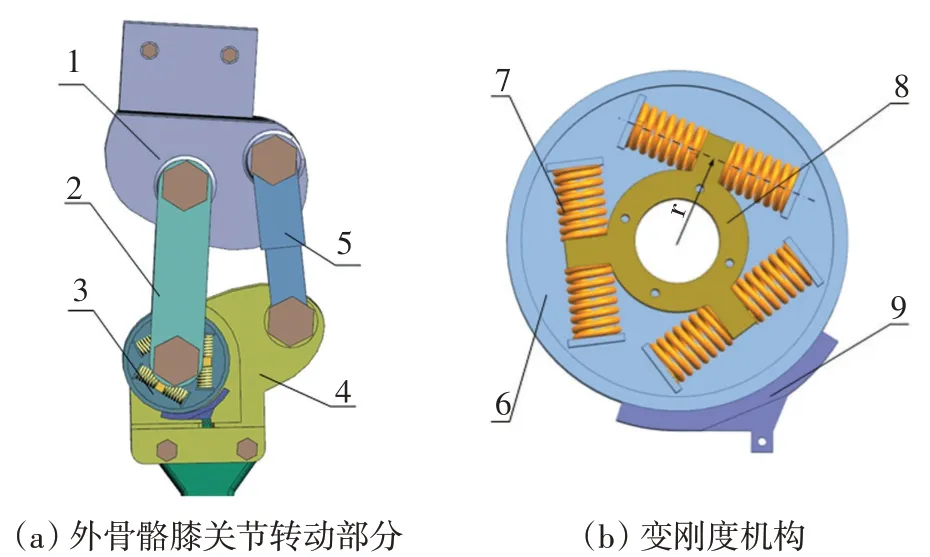
圖4 變剛度膝關(guān)節(jié)裝置Fig.4 Variable stiffness knee joint device
1.4 踝關(guān)節(jié)裝置
踝關(guān)節(jié)裝置如圖5所示,采用鉸鏈?zhǔn)絾屋S關(guān)節(jié)設(shè)計(jì),足底板采用彈性材料,能夠增加外骨骼的踝關(guān)節(jié)靈活性,并在踝關(guān)節(jié)跖屈方向提供一定的彈性助力。足底板后部與外骨骼下肢由助力彈簧連接,助力彈簧在踝關(guān)節(jié)背曲時(shí)被拉伸蓄能,在踝關(guān)節(jié)跖屈時(shí)收縮做功,由此達(dá)到輔助人體踝關(guān)節(jié)在行走過程中運(yùn)動(dòng)的目的。
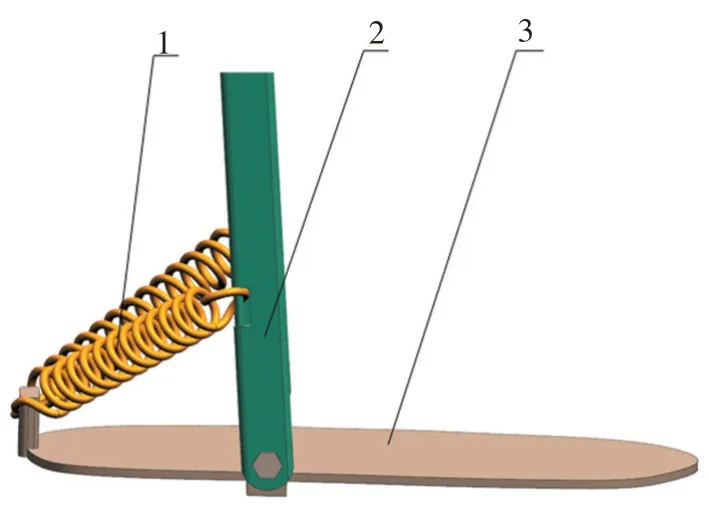
圖5 踝關(guān)節(jié)裝置Fig.5 Ankle joint device
2 運(yùn)動(dòng)分析
人體步態(tài)主要分為兩個(gè)階段,分別是支撐相階段和擺動(dòng)相階段,支撐相階段約占60%,擺動(dòng)相階段約占40%,其中支撐相階段是人體膝關(guān)節(jié)承受載荷最大的階段,行走過程中膝關(guān)節(jié)承受載荷最高可達(dá)人體重力的3倍[1]。若下肢外骨骼能夠有效減少支撐相階段人體膝關(guān)節(jié)承受載荷,則可以在人體行走的整個(gè)步態(tài)周期內(nèi)起到良好的分承作用。
圖6 所示為重力支撐模型,其中fh為佩戴下肢外骨骼后人體膝關(guān)節(jié)所受載荷,fl為下肢外骨骼的膝關(guān)節(jié)所受載荷,BW為未佩戴下肢外骨骼時(shí)人體膝關(guān)節(jié)所受載荷,m為外骨骼附著于大腿部分的質(zhì)量。驗(yàn)證下肢外骨骼在支撐相階段有良好的分承作用,即佩戴下肢外骨骼后人體膝關(guān)節(jié)所受載荷fh與未佩戴下肢外骨骼時(shí)人體膝關(guān)節(jié)所受載荷BW的比值較低。重力支撐模型的數(shù)學(xué)公式為:

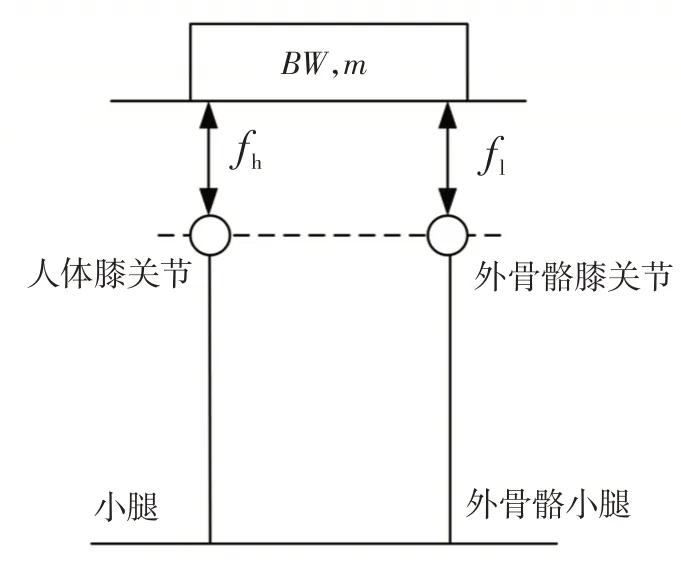
圖6 重力支撐模型Fig.6 Gravity support model
外骨骼的膝關(guān)節(jié)轉(zhuǎn)動(dòng)部分的結(jié)構(gòu)簡圖如圖7所示,在支撐相階段,剎車塊制動(dòng)彈簧托盤,桿AB與桿AE之間轉(zhuǎn)動(dòng)副剛度變大,機(jī)構(gòu)為二自由度欠驅(qū)動(dòng)機(jī)構(gòu),桿CD間加入的彈簧X彌補(bǔ)了部分的動(dòng)力學(xué)約束。

圖7 外骨骼的膝關(guān)節(jié)轉(zhuǎn)動(dòng)部分的結(jié)構(gòu)簡圖Fig.7 Structural sketch of theexoskeleton kneejoint rotation section
根據(jù)結(jié)構(gòu)簡圖可得機(jī)構(gòu)的位置方程
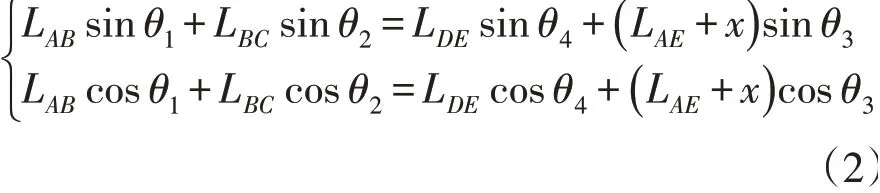
式中,x為彈簧X的長度。
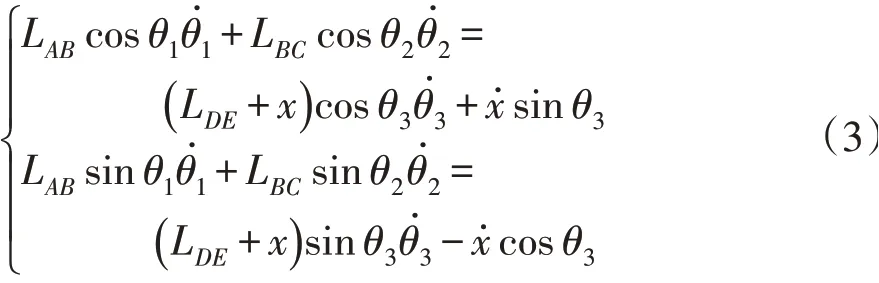
式兩端對(duì)時(shí)間t求導(dǎo),可得如下公式為:
拉格朗日法是機(jī)器人動(dòng)力學(xué)建模常用的方法,不需要求出機(jī)構(gòu)桿件的內(nèi)作用力。把系統(tǒng)的拉格朗日函數(shù)L定義為系統(tǒng)的動(dòng)能K和勢能P之差,即
系統(tǒng)的動(dòng)力學(xué)方程為:
式中,qi為表示動(dòng)能和勢能的坐標(biāo),q˙i為與之對(duì)應(yīng)的速度,F(xiàn)i為作用在第i個(gè)坐標(biāo)上的力,n為連桿數(shù)目。
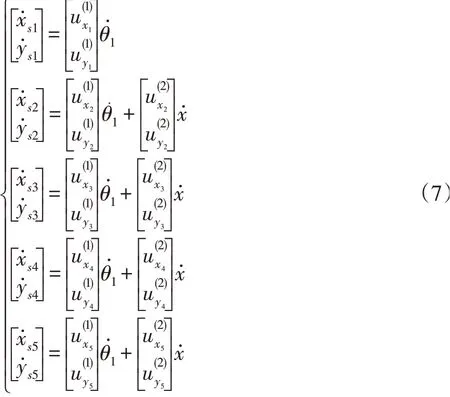
各構(gòu)件的重心坐標(biāo)表達(dá)式為:
式中,xsi和ysi分別對(duì)應(yīng)桿AB、BC、CD、DE的質(zhì)心橫縱坐標(biāo),xs5和ys5為彈簧X的橫、縱坐標(biāo)。
各構(gòu)件的重心加速度表達(dá)式為:
選取θ1,x為兩個(gè)互相獨(dú)立的廣義坐標(biāo),記為q1=θ1,q2=x。通過計(jì)算可得系統(tǒng)的總動(dòng)能K和總勢能P分別為:
式中,g為重力加速度,k1為彈簧X的彈性系數(shù),a為彈簧X的初始長度,k2為彈簧組內(nèi)每個(gè)彈簧的彈性系數(shù),r為A點(diǎn)到彈簧組內(nèi)彈簧軸線的距離,其為20 mm,
由上可得系統(tǒng)的動(dòng)力學(xué)方程為:

以上公式中,T1為桿AB所受外部驅(qū)動(dòng)力矩,T2為彈簧X所受外部驅(qū)動(dòng)力矩且其值為0。
3 承載能力驗(yàn)證及優(yōu)化
圖8 所示為人體支撐相膝關(guān)節(jié)軸向載荷及屈伸角度,圖9所示為LAB滿載所受等效力矩T。中國成年男子平均體重66.2 kg,成年女子平均體重57.3 kg,本文采用66.2 kg為標(biāo)準(zhǔn)體重,下肢外骨骼附著于大腿部分的質(zhì)量約為1.5 kg,若以上載荷均作用于外骨骼中膝關(guān)節(jié),則在支撐相階段LAB所受等效力矩為:

圖8 人體支撐相膝關(guān)節(jié)軸向載荷及屈伸角度Fig.8 Human support phase knee axial load and flexion-extension angle

圖9 LAB滿載所受等效力矩TFig.9 Equivalent moment T at full load for LAB

式中,θ5為載荷fl與桿AB之間所夾銳角。
外骨骼的膝關(guān)節(jié)轉(zhuǎn)動(dòng)部分為加入了柔性運(yùn)動(dòng)副的二自由度欠驅(qū)動(dòng)機(jī)構(gòu),為求解LAB在支撐相階段運(yùn)動(dòng)實(shí)際所受驅(qū)動(dòng)力矩,本文采用張建軍等[16]提出的一種動(dòng)力學(xué)數(shù)值迭代算法,迭代時(shí)間步長為0.02 s,迭代次數(shù)n為300次。使用MATLAB對(duì)系統(tǒng)進(jìn)行仿真求解,機(jī)構(gòu)參數(shù)如表1所示。k2的值會(huì)影響外骨骼的膝關(guān)節(jié)轉(zhuǎn)動(dòng)部分的剛度,也會(huì)影響LAB驅(qū)動(dòng)力矩T1,為使外骨骼承載人體膝關(guān)節(jié)的載荷最大,即LAB所需驅(qū)動(dòng)力矩T1與LAB滿載所受等效力矩T之差T′最小,需對(duì)k2的值進(jìn)行優(yōu)選。計(jì)算可知T′隨著k2增大而單調(diào)遞減,機(jī)構(gòu)動(dòng)力學(xué)求解及k2優(yōu)選流程圖如圖10所示。
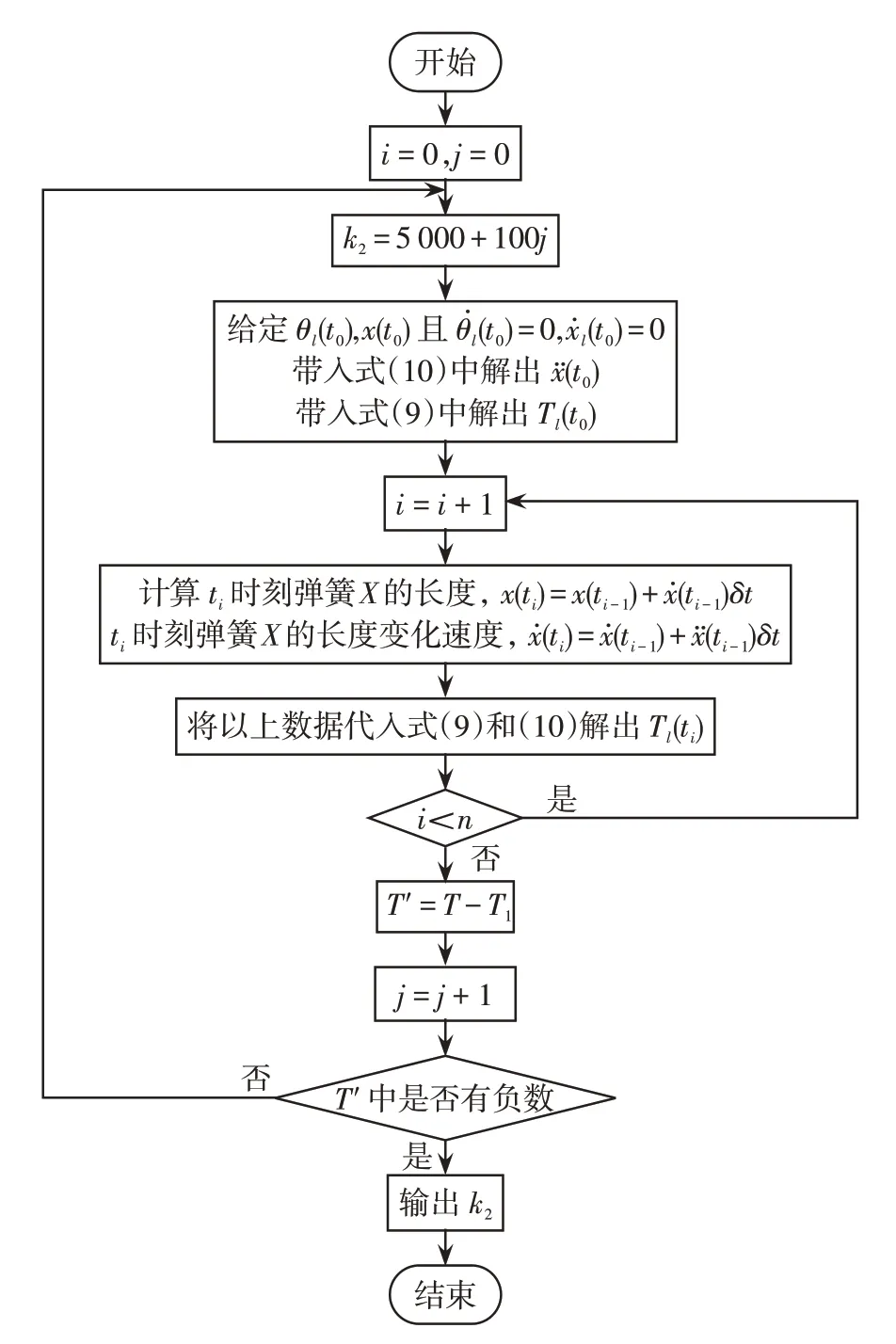
圖10 機(jī)構(gòu)動(dòng)力學(xué)求解及k2優(yōu)選流程圖Fig.10 Mechanism dynamics solution and k2 optimal flowchart

表1 機(jī)構(gòu)參數(shù)Tab.1 Institutional parameters
優(yōu)化前與優(yōu)化后LAB所需驅(qū)動(dòng)力矩如圖11所示,通過優(yōu)選計(jì)算可得,k2=10 500 N/m時(shí),LAB所需驅(qū)動(dòng)力矩T1與LAB滿載所受等效力矩T之差T′達(dá)到最小值,T′與T瞬時(shí)比值的平均值為36.03%,即穿戴本下肢外骨骼之后相較于未穿戴外骨骼在支撐相階段膝關(guān)節(jié)運(yùn)動(dòng)載荷可減少63.97%。
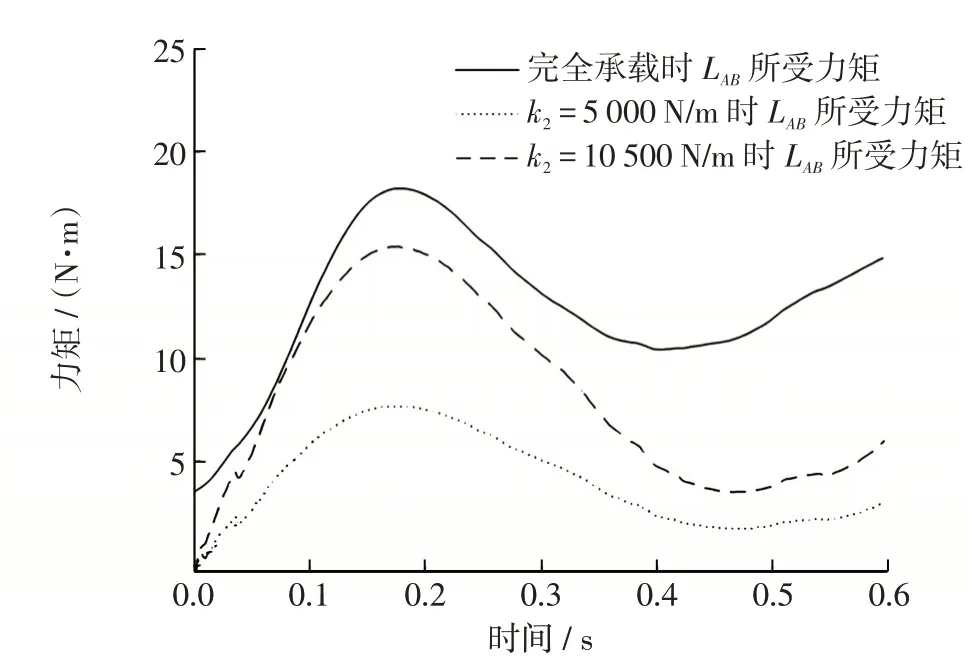
圖11 優(yōu)化前與優(yōu)化后LAB所需驅(qū)動(dòng)力矩Fig.11 Driving torquerequired by LAB beforeand after optimization
4 結(jié)論
1)針對(duì)人體膝關(guān)節(jié)的轉(zhuǎn)動(dòng)瞬心規(guī)律及人體在行走過程中在支撐相階段需要外骨骼提供輔助支撐、擺動(dòng)相階段需要外骨骼具有較低剛度的特點(diǎn),設(shè)計(jì)了一種帶有智能張緊功能的自適應(yīng)變剛度下肢外骨骼。
2)采用拉格朗日法建立了外骨骼的膝關(guān)節(jié)轉(zhuǎn)動(dòng)部分的動(dòng)力學(xué)模型,借助MATLAB對(duì)外骨骼變剛度機(jī)構(gòu)中彈簧組內(nèi)彈簧的彈性系數(shù)k2進(jìn)行優(yōu)選,仿真驗(yàn)證表明,本下肢外骨骼可起到顯著的膝關(guān)節(jié)載荷分承效果,為進(jìn)一步的研究提供了基礎(chǔ)。
3)由于個(gè)體差異造成不同個(gè)體存在體重及膝關(guān)節(jié)尺寸差異,本下肢外骨骼的實(shí)際承載效果仍有待實(shí)驗(yàn)樣機(jī)進(jìn)一步驗(yàn)證。
