空間大型結(jié)構(gòu)體組裝接口設(shè)計及裝配性能分析
2021-02-24 08:48:28郭宏偉王洪洋劉榮強鄧宗全
宇航學(xué)報 2021年12期
關(guān)鍵詞:分析
史 創(chuàng),郭宏偉,王洪洋,陶 磊,劉榮強,鄧宗全
(哈爾濱工業(yè)大學(xué)機器人技術(shù)與系統(tǒng)國家重點實驗室,哈爾濱 150001)
0 引 言
現(xiàn)如今,無論是太陽能電站還是空間反射鏡等結(jié)構(gòu)體的尺寸和質(zhì)量都越來越大,而且其支撐機構(gòu)也很大[1]。但是現(xiàn)在以及未來一段時間內(nèi),運載工具還很難將整個大型結(jié)構(gòu)體運送到太空中,只能分批運送,在空間中組裝[2]。在軌組裝技術(shù)的運用大大擴展了空間作業(yè)范圍。
美國宇航局曾提出利用在軌組裝技術(shù)將多個聚光鏡組裝成太陽能電站[3]。西北工業(yè)大學(xué)的黃攀峰等人提出了細(xì)胞衛(wèi)星的概念,將衛(wèi)星的各部件拆開,在空間軌道中組裝[4]。在20世紀(jì)90年代,為了實現(xiàn)在空間中完成桁架結(jié)構(gòu)的裝配,NASA開始研究一套裝配系統(tǒng),主要設(shè)計思想是使用機器人遠程遙控完成裝配。對機器人進行路徑的規(guī)劃,當(dāng)機器人到達指定位置后提供輸入力矩進行裝配[5]。
無論是航天器還是空間軌道運行等,空間對接都是必不可少的[6],對接接口則是其中關(guān)鍵的結(jié)構(gòu)。無論是在國內(nèi)還是國外,學(xué)者們都創(chuàng)造了許多不同的空間對接接口形式。例如,為了實現(xiàn)“spheres”模塊的對接,美國提出了一種不同于機械對接接口的形式,該接口主要采用電和磁結(jié)合的方式[7-11]。其主要原理是電生磁,將線圈和接口相連,接口在磁力的作用下相互靠近實現(xiàn)對接。考慮到對接時會產(chǎn)生沖擊,所以還設(shè)置了偏置彈簧提高對接的穩(wěn)定性。對于阿波羅與聯(lián)盟號之間的對接,美蘇兩國設(shè)計了周邊式對接機構(gòu)。機構(gòu)主要分為主動和被動兩部分,將捕捉環(huán)和主動部分的可移動桿件連接起來,桿件帶動環(huán)運動,同時機構(gòu)還設(shè)有緩沖機構(gòu),通過捕捉環(huán)的運動以及緩沖機構(gòu)的緩沖來實現(xiàn)機構(gòu)的平穩(wěn)對接[12]。在1996年,日本設(shè)計的一種接口具有末端執(zhí)行機構(gòu),該機構(gòu)有鉤爪用于抓取裝置,并且為了實現(xiàn)鎖定還設(shè)置有鎖緊機構(gòu)[13-14]。美國曾在航天器上采用了“錐—桿”式對接機構(gòu),還設(shè)有獨立的鎖緊機構(gòu),均布在圓周上完成對機構(gòu)的鎖緊,該對接機構(gòu)具有良好的密封性[15]。由DARPA提出的軌道快車項目中使用的對接機構(gòu)為三爪式,主要作用是捕捉被動部分,隨后四連桿機構(gòu)在電機的帶動下開始運動。最終,在一系列的動作后,鎖緊手爪的鎖緊與對接[16-18]便可完成。上海宇航工程系統(tǒng)研究所的張華研究了對接機構(gòu)的鎖緊,得出了通過減小摩擦力可提高對接鎖系運動的同步性的結(jié)論[19]。哈爾濱工業(yè)大學(xué)的史士財?shù)仍O(shè)計了空間機械臂的快換接口,該接口采用了雙圓錐面的配合方式[20],拆卸方便。在2017年,中北大學(xué)創(chuàng)造了一種新型在軌模塊對接接口。該接口的形式采用三爪式,并將自適應(yīng)技術(shù)和記憶合金技術(shù)融入其中[21]。
結(jié)合以上內(nèi)容可知,目前所設(shè)計的對接接口多采用電磁或電動結(jié)構(gòu)實現(xiàn)對接和鎖緊,且大多為單次鎖緊,可靠性欠佳。機器人技術(shù)越來越先進,空間大型乃至超大型結(jié)構(gòu)體的建立將越來越依賴在軌組裝技術(shù)。
本文以實現(xiàn)空間大型結(jié)構(gòu)體的在軌組裝為重要出發(fā)點,設(shè)計了全新的組裝接口。論文章節(jié)安排如下所示:論文第1節(jié)提出并設(shè)計了一種全新的空間對接機構(gòu);第2節(jié)針對對接接口,具體的分析了其容差性能;論文第3節(jié)通過仿真分析,研究了組裝接口對接參數(shù)對對接過程的影響規(guī)律。
1 組裝接口
1.1 原理設(shè)計
為了提高在軌組裝的容差性能和對接過程的穩(wěn)定性,本文設(shè)計了鎖緊爪式對接機構(gòu),如圖1所示,為機構(gòu)的原理圖。
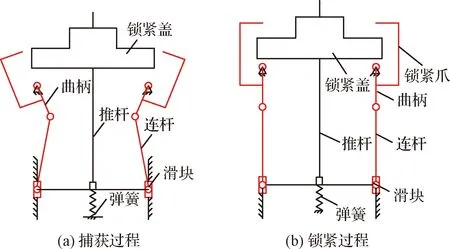
圖1 對接機構(gòu)原理圖Fig.1 Schematic diagram of the docking mechanism
彈簧壓縮后為機構(gòu)的運動提供動力,為提高鎖緊機構(gòu)的可靠性,采用三爪式和鋼球式機構(gòu)聯(lián)合鎖緊。對接接口可分為兩個部分:導(dǎo)向機構(gòu)與鎖緊機構(gòu)。
1.2 導(dǎo)向機構(gòu)
導(dǎo)向機構(gòu)的組成部分有推桿、壓縮彈簧、螺紋蓋等。圖2(a)為機構(gòu)剖面,圖2(b)為三維模型。導(dǎo)向頭的頭部結(jié)構(gòu)為錐形,角度是45°,在導(dǎo)向頭上開了八個槽,用于裝載鋼球。為提高鎖緊蓋與推桿、導(dǎo)向頭與螺紋端蓋之間連接的穩(wěn)定性,采用的連接方式為螺紋連接。在對接過程中,組裝單元受到機械臂的推力,導(dǎo)向頭開始運動并靠近上箱體,當(dāng)其到達預(yù)先設(shè)置的限位位置時,由于推力變大,用于減輕對接過程產(chǎn)生的碰撞的壓縮彈簧開始壓縮,推桿開始運動到鎖緊為止。
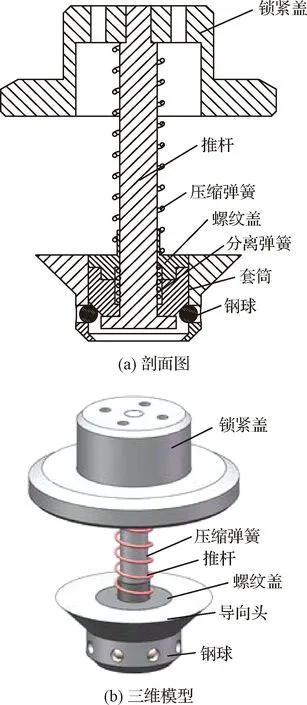
圖2 導(dǎo)向機構(gòu)Fig.2 Guide mechanism
1.3 鎖緊機構(gòu)
導(dǎo)向頭和鎖緊蓋的鎖緊依靠鎖緊機構(gòu)來實現(xiàn),空間結(jié)構(gòu)組裝單元的對接在鎖緊動作結(jié)束后便完成了。鎖緊機構(gòu)的驅(qū)動力由受到推桿推動的導(dǎo)向件提供,主要由上箱體、鎖緊爪、曲柄、連桿、驅(qū)動彈簧、導(dǎo)向件以及相應(yīng)的軸和配件組成。在上箱體設(shè)置了限位結(jié)構(gòu),從而可以準(zhǔn)確的鎖緊以120°的間隔均勻分布在其上的鎖緊爪。鎖緊爪的運動伴隨著沖擊的產(chǎn)生,驅(qū)動彈簧可以緩沖此過程的沖擊。導(dǎo)向件相當(dāng)于曲柄滑塊機構(gòu)中的滑塊,可帶動該機構(gòu)進行運動,最終完成鎖緊。具體結(jié)構(gòu)如圖3所示。
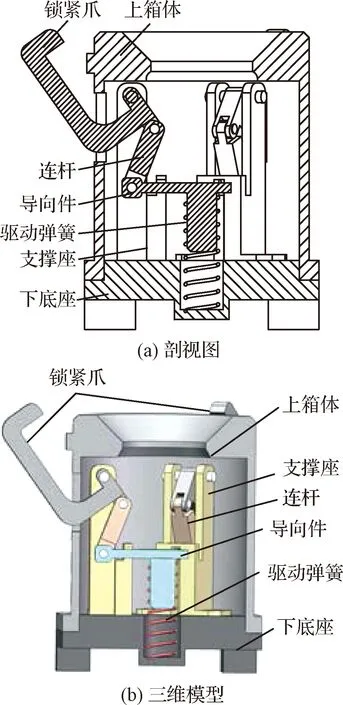
圖3 鎖緊機構(gòu)Fig.3 Locking mechanism
主動件是驅(qū)動曲柄滑塊機構(gòu)轉(zhuǎn)動的導(dǎo)向件,導(dǎo)向件運動帶動曲柄運動。當(dāng)曲柄轉(zhuǎn)動到如圖4所示的位置時,曲柄滑塊機構(gòu)的主動件和從動件共線,到達死點位置,這樣便可實現(xiàn)自鎖,從而鎖緊鎖緊蓋。
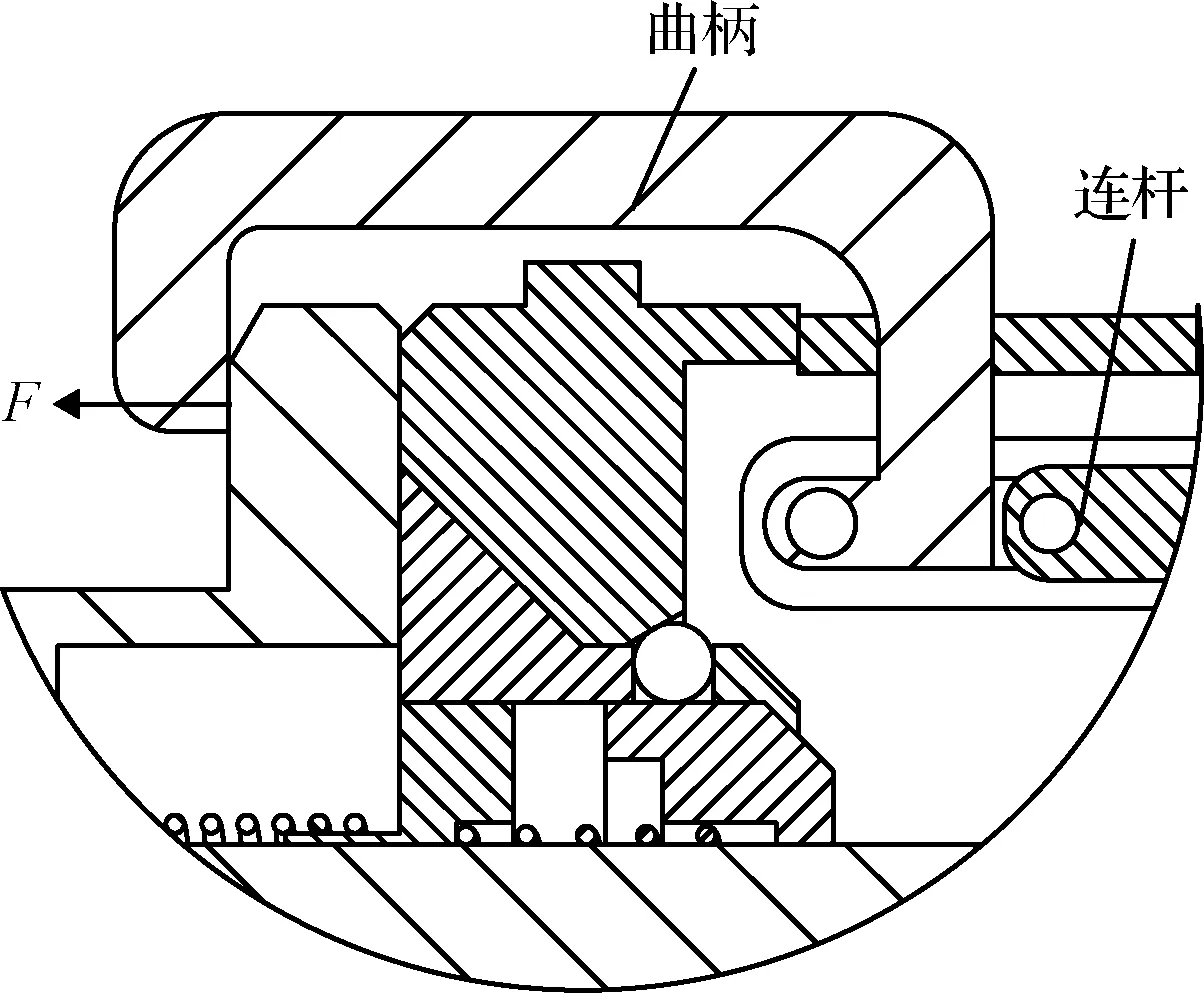
圖4 死點位置Fig.4 Dead-center position
本文使用了雙重鎖緊,可以較大程度將空間結(jié)構(gòu)組裝單元在軌對接的連接剛度提高。導(dǎo)向頭和上箱體的錐形內(nèi)壁接觸并繼續(xù)運動,在其到達指定的位置后,機械臂提供更大的推力,推桿的受力平衡遭到破壞而向下運動,螺紋蓋和分離套筒在分離彈簧的作用下開始產(chǎn)生相對運動、逐漸分離。分離套筒在運動過程中對鋼球施加壓力,當(dāng)壓力達到一定值時,鋼球開始運動。鋼球向上箱體開的凹槽運動,最終在這兩個槽內(nèi)各占據(jù)自身體積一半的位置,導(dǎo)向頭的鎖緊完成,此方案有效的提高了對接接口的可靠性。
1.4 對接運動過程
整個對接過程如圖5所示。
如圖6所示,第一階段,由于重疊現(xiàn)象的出現(xiàn),接口會產(chǎn)生位姿偏差。需要同時調(diào)整自身位姿及相互之間的相對位置。
第二階段,導(dǎo)向頭觸碰到鎖緊機構(gòu)的上箱體,在進入上箱體的對接錐形結(jié)構(gòu)后,繼續(xù)運動直至完全進入,其運動到位后的狀態(tài)如圖7所示。在此過程中產(chǎn)生的碰撞可以通過導(dǎo)向結(jié)構(gòu)的壓縮彈簧減輕。
第三階段,由于上箱體錐形內(nèi)壁的限制,導(dǎo)向頭停止運動。鎖緊蓋和推桿繼續(xù)運動,推動分離套筒運動并擠壓鋼球,實現(xiàn)如圖8所示的鋼球鎖緊。
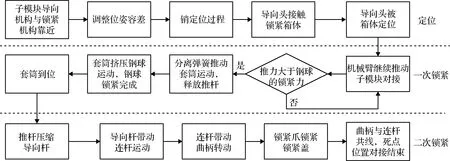
圖5 組裝過程Fig.5 Assembly process
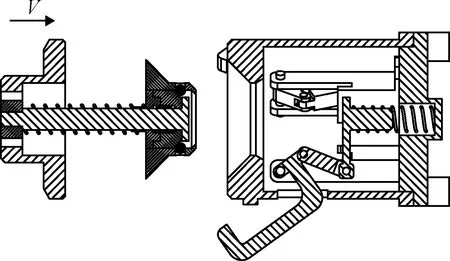
圖6 位姿調(diào)整Fig.6 Pose adjustment
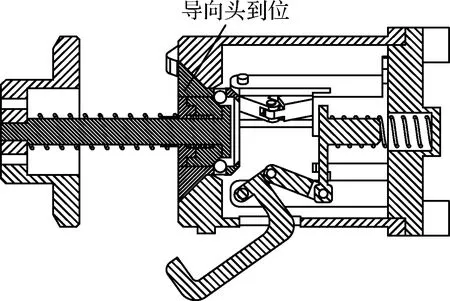
圖7 導(dǎo)向頭到位Fig.7 Guide head in place
圖8 鋼球鎖緊Fig.8 Ball lock
圖9 鎖緊爪鎖緊Fig.9 Lock claw lock
如圖9所示,第四階段,推桿繼續(xù)運動,導(dǎo)向件受到推桿的力作用,驅(qū)動曲柄滑塊機構(gòu)運動,當(dāng)鎖緊蓋運動到上箱體頂部時,鎖緊爪對其進行二次鎖定。
2 容差性能分析
2.1 接口運動學(xué)分析
圖10為組裝單元對接接口的布置情況以及距離關(guān)系。可以看出,組裝接口上下對稱,在分析容差條件時通過分析任意一組對接接口便可表示出所有對接接口的情況。其中,D1為對接模塊與對接平面中心坐標(biāo)沿Z軸方向的距離,D2為上箱體頂部與底部之間的距離,D3為導(dǎo)向頭前端中心與鎖緊蓋末端坐標(biāo)間的距離,D4為對接模塊與對接平面中心坐標(biāo)沿Y軸方向的距離,D5為兩組裝單元中心位姿無任何偏差,開始時組裝單元之間的距離。
圖10 組裝單元尺寸Fig.10 Dimensions of assembly unit
如圖11所示,在衛(wèi)星載體中心建立統(tǒng)一參考坐標(biāo)系∑O-xyz。
圖11 兩對接單元之間的坐標(biāo)系Fig.11 The coordinate system between two docking units
在被動、主動單元的對接面中心分別建立∑O1-x1y1z1和∑O4-x4y4z4坐標(biāo)系,在被動鎖緊機構(gòu)的底座末端建立∑O2-x2y2z2坐標(biāo)系。在上箱體的錐型結(jié)構(gòu)頂部中心和前端中心分別建立∑O3-x3y3z3和∑O6-x6y6z6坐標(biāo)系,在導(dǎo)向機構(gòu)鎖緊蓋中心建立∑O5-x5y5z5坐標(biāo)系。
導(dǎo)向頭前端中心與鎖緊蓋末端坐標(biāo)系間的變換矩陣為:
(1)
上箱體頂部與底部之間的變換矩陣為:
(2)
對接模塊與對接平面中心坐標(biāo)系間的變換矩陣為:
(3)
(4)
(5)
式中:d為主動對接模塊中心到被動對接模塊中心的距離。
綜合考慮組裝單元加工精度和機械臂控制精度帶來的位姿偏差,推導(dǎo)得到機構(gòu)的總位姿:
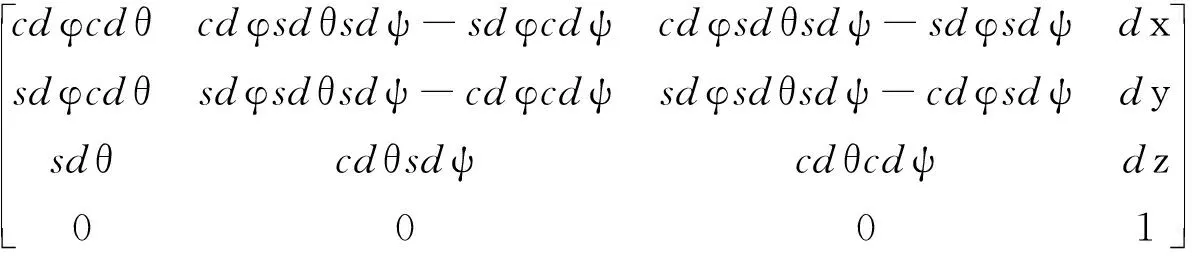
(6)
式中: cdφ=cosdφ,sdφ=sindφ,cdθ=cosdθ,sdθ=sindθ,cdψ=cosdψ,sdψ=sindψ,φ為繞z軸的角度偏差,θ為繞x軸的角度偏差,ψ為繞y軸的角度偏差,T為整個對接機構(gòu)的平移變換矩陣,R為整個對接機構(gòu)的旋轉(zhuǎn)變換矩陣。
則真實工作環(huán)境下∑O1-x1y1z1到∑O4-x4y4z4的齊次變換矩陣為:
(7)
若∑O6-x6y6z6上有一點坐標(biāo)為(x0,y0,z0),則(x0,y0,z0)在∑O3-x3y3z3的坐標(biāo)為:
(8)
2.2 容差性能理論計算
根據(jù)圖12所示,在僅有一個自由度上的容差時,整個對接機構(gòu)的極限位置偏差為:
Δrmax=R-r
(9)
其中,r為導(dǎo)向頭在上箱體頂部方向上的投影半徑,Δr為對接機構(gòu)的位置偏差。
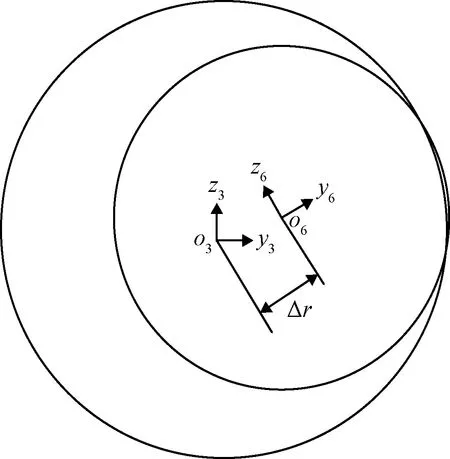
圖12 對接機構(gòu)最大極限偏差Fig.12 Maximum limit deviation of docking mechanism
機械臂抓取組裝單元由一個向另外一個運動過程中,導(dǎo)向頭必須在上箱體的包絡(luò)范圍內(nèi)運動,這樣才能有效的保證對接機構(gòu)能夠順利的進行對接,如圖13所示。
為了滿足位移條件, Q點的位姿不可以超出上箱體的圓錐包絡(luò)。為了滿足角度條件,上箱體和導(dǎo)向頭二者的中心距離在上箱體頂部方向上的投影距離不能大于二者的半徑之差。需滿足如下所示的關(guān)系約束:
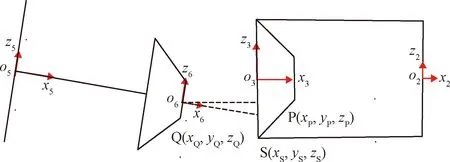
圖13 導(dǎo)向頭位姿偏差Fig.13 Steering head pose deviation
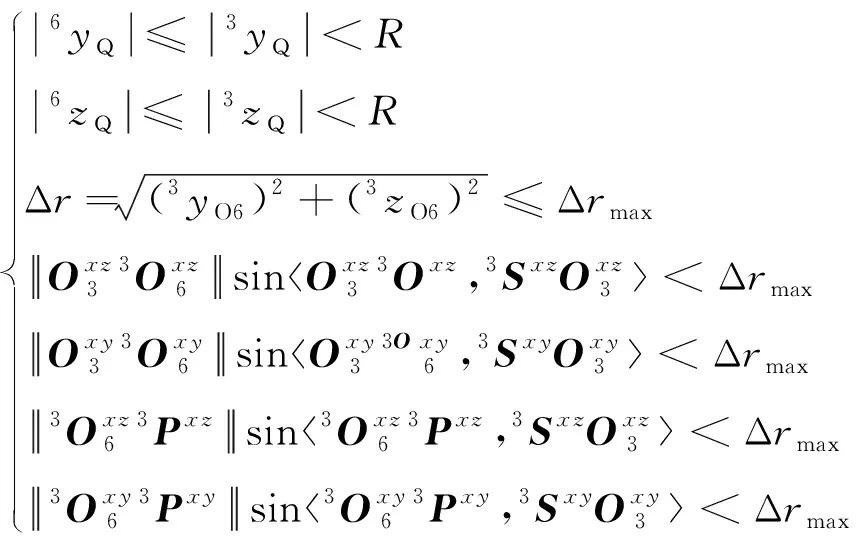
(10)
根據(jù)本文設(shè)計實物的具體尺寸,結(jié)合式(1)-式(10),可以確定對接機構(gòu)容差的可行域為:
(11)
結(jié)合上述式子能夠推出各位移、角度的偏差范圍,容差可行域如圖14所示。
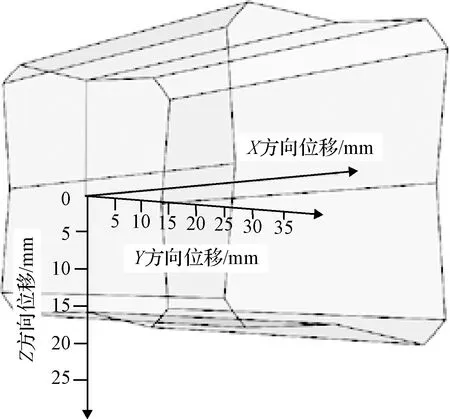
圖14 容差可行域Fig.14 Tolerance feasible region
2.3 容差性能仿真分析
以各個方向的位姿為自變量,通過改變自變量來確認(rèn)當(dāng)各個容差作用于對接接口時,是否能夠順利的完成對接,進而證明其容差性能。取2.2節(jié)中分析得出的最大偏差量進行ADAMS仿真分析,得到5種狀態(tài)下導(dǎo)向頭與上箱體接觸時力的大小以及二者的中心距離,見表1。
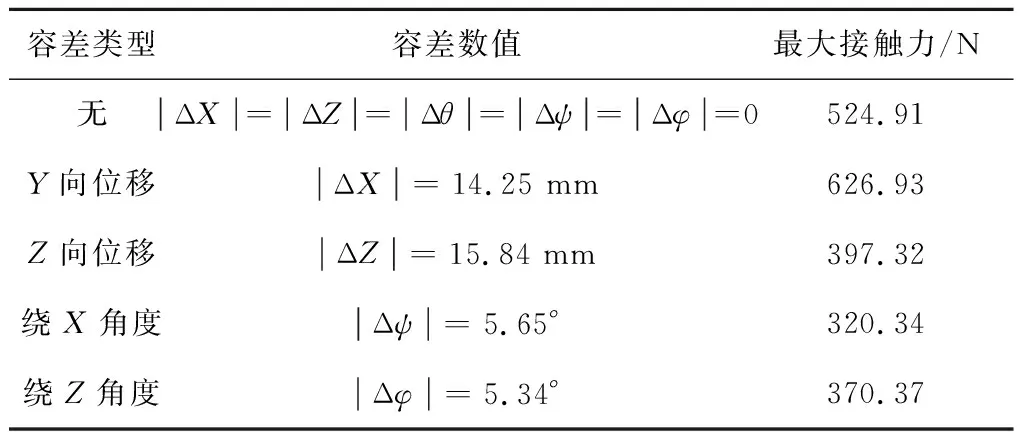
表1 容差仿真條件Table 1 Tolerance simulation parameter table
從圖15可以看出,在各最大偏差下,對接機構(gòu)均完成了對接。
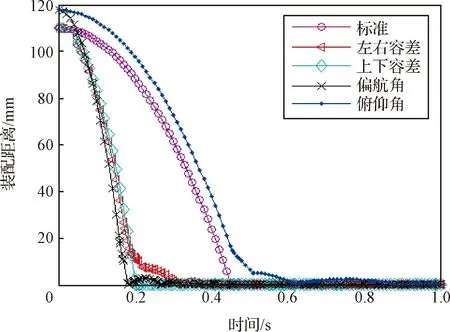
圖15 對接機構(gòu)裝配距離變化關(guān)系Fig.15 Relationship between assembly distance of docking mechanism
3 單模塊裝配影響因素分析
在單元對接過程中會產(chǎn)生沖擊,為評估沖擊的大小,引入接觸力。如圖16所示,在ADAMS中建立對接機構(gòu)仿真模型,推力設(shè)置為10 N,方向指向鎖緊機構(gòu)。
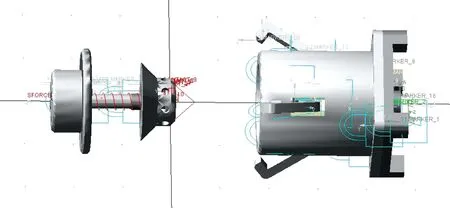
圖16 仿真模型Fig.16 Simulation model
3.1 摩擦系數(shù)的影響分析
首先分析對接過程產(chǎn)生的沖擊與靜摩擦系數(shù)的關(guān)系,在仿真分析時,設(shè)置對接機構(gòu)為零偏差,設(shè)置上箱體與導(dǎo)向頭的接觸剛度為100000 N/mm(參照文獻[22]中鋼與鋼之間干摩擦狀態(tài)下的接觸剛度進行取值)、推力為10 N、動摩擦系數(shù)為0.1,上箱體錐角為45°,如圖17所示,為接觸力峰值曲線圖。
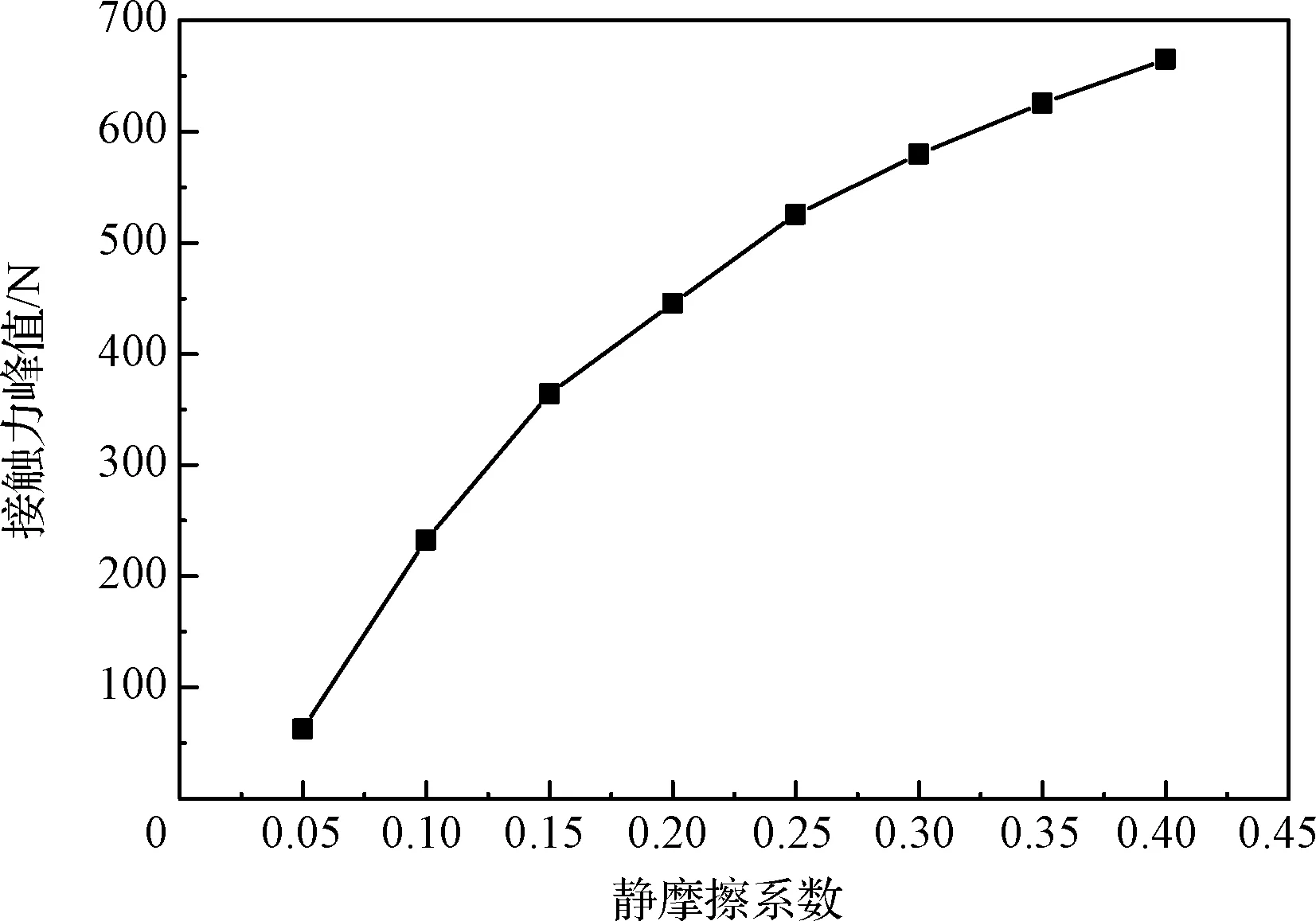
圖17 靜摩擦系數(shù)影響曲線Fig.17 Influence curve of static friction coefficient
ADAMS中動靜摩擦系數(shù)隨著相對滑移速度自動切換,呈非線性變化規(guī)律[22]。從圖17中可以看出,由于本文靜摩擦系數(shù)不同,系統(tǒng)在相同的推力作用下,其相對滑移速度不同,計算得出的碰撞接觸力增長規(guī)律呈逐漸減慢的非線性。
以動摩擦系數(shù)為自變量,設(shè)置靜摩擦系數(shù)為0.3,其余參數(shù)不變進行仿真分析。
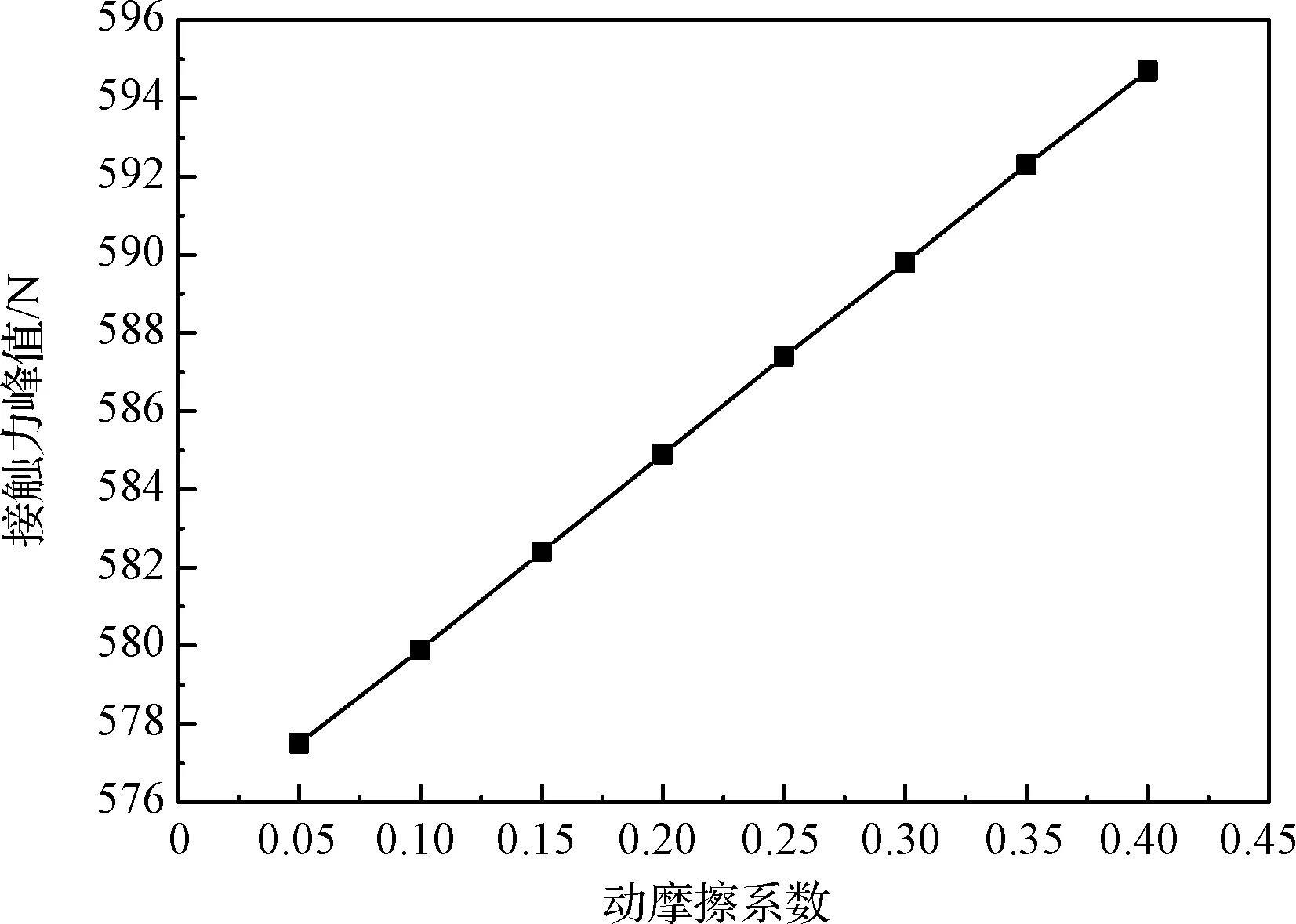
圖18 動摩擦系數(shù)影響曲線Fig.18 Influence curve of dynamic friction coefficient
從圖18中可以看出,物體在相同推力和靜摩擦系數(shù)下,在克服靜摩擦力開始運動后,初始的相對滑移速度相等,動摩擦系數(shù)影響規(guī)律呈線性關(guān)系。
動摩擦系數(shù)變化所引起的接觸力變化沒有靜摩擦系數(shù)大,在設(shè)計時應(yīng)盡量減少靜摩擦系數(shù)。
3.2 推力的影響分析
以機械臂推力為自變量,靜摩擦系數(shù)0.3、動摩擦系數(shù)0.1,其余參數(shù)不變進行仿真分析。
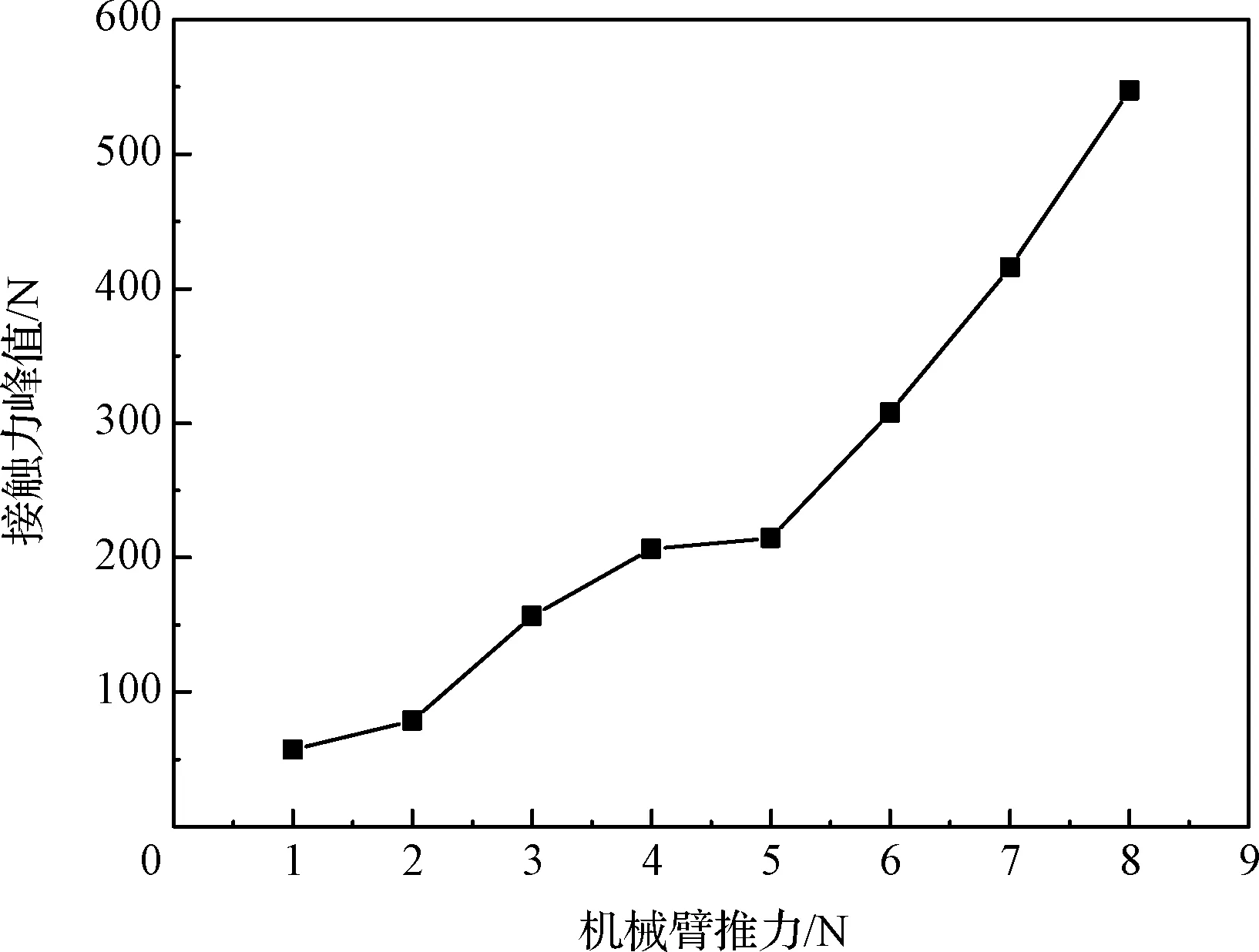
圖19 推力影響曲線Fig.19 Thrust influence curve
導(dǎo)向頭與上箱體之間的主要接觸方式為沖擊式接觸,由于推力的增加導(dǎo)致對接時速度的增加,通過文獻[22]可知,在ADAMS軟件中接觸采用線性等效彈簧阻尼模型計算,具有強烈的非線性、非保守特性。從圖19中可以得出,接觸力隨推力增大而增大,在推力增大到6 N之后,接觸力迅速增大,到8 N之后接觸力增加、速度降低,整體規(guī)律呈非線性。所以,既要將推力降到最低又要滿足對接所需的最小值,最終實現(xiàn)沖擊的降低,提高對接平穩(wěn)性。
3.3 錐角影響分析
以碰撞錐角為自變量,其余參數(shù)不變進行仿真分析。

圖20 錐角影響曲線Fig.20 Cone angle influence curve
錐角的增大導(dǎo)致接觸時的對接速度方向發(fā)生變化,接觸力與錐角成正相關(guān)的關(guān)系。在ADAMS軟件中接觸具有強烈的非線性、非保守特性。從圖20中可以得出接觸力隨著錐角的增大而增大,增長的趨勢呈先陡后緩的狀態(tài)。因此,在設(shè)計錐角時,應(yīng)采用小錐角,同時為了對接的準(zhǔn)確性,還要滿足位姿容差。
4 結(jié) 論
本文首先提出了一種新型的適用于在軌組裝的三爪式對接接口方案并完成了相關(guān)的設(shè)計。其次,建立了對接結(jié)構(gòu)位移和角度容差的理論模型,得出X方向容差為14.25 mm,Z方向容差為15.84 mm,繞X軸角度容差為5.65°,繞Y軸角度容差為5.51°,繞Z軸角度容差為5.34°,利用ADAMS軟件仿真驗證了理論模型的正確性。最后,通過改變動、靜摩擦系數(shù)、機械臂推力及碰撞錐角,對接口對接情況進行了仿真分析,得出了對接機構(gòu)接觸力大小與靜摩擦系數(shù)、機械臂推力與碰撞錐角之間的非線性影響關(guān)系,提出了可以減小碰撞沖擊、使對接更加穩(wěn)定可靠的設(shè)計建議,為實際工程設(shè)計提供了參考。
猜你喜歡
現(xiàn)代畜牧科技(2021年9期)2021-10-13 06:39:14
民用飛機設(shè)計與研究(2020年4期)2021-01-21 09:15:02
電子制作(2018年18期)2018-11-14 01:48:24
山東工業(yè)技術(shù)(2016年15期)2016-12-01 05:31:22
當(dāng)代經(jīng)濟研究(2016年5期)2016-12-01 03:12:05
現(xiàn)代農(nóng)業(yè)(2016年5期)2016-02-28 18:42:46
出版與印刷(2016年3期)2016-02-02 01:20:11
中國中醫(yī)藥現(xiàn)代遠程教育(2014年11期)2014-08-08 13:23:44
華北水利水電大學(xué)學(xué)報(社會科學(xué)版)(2014年3期)2014-04-16 04:38:31
終身教育研究(2014年5期)2014-02-28 01:23:06