主控格柵反射器基體結構/壓電作動器參數集成優化設計
2021-03-13 03:23:56宋祥帥初未萌譚述君吳志剛
宇航學報 2021年2期
宋祥帥,初未萌,譚述君,吳志剛
(1.大連理工大學航空航天學院,大連 116024;2.大連理工大學工業裝備結構分析國家重點實驗室,大連 116024)
0 引 言
隨著空間技術的發展,對地觀測、深空探測等領域對天線的工作頻率要求越來越高[1-2]。以對地觀測的氣象衛星為例,為了全天候觀測大氣組成、溫度、濕度、水汽等主要的氣象指標,天線的工作頻率應高于205 GHz[3]。我國新一代微波氣象衛星對3 m口徑425 GHz天線也提出了明確的應用需求。為了滿足上述天線高增益和低旁瓣的電性能,天線反射器的形面精度(Root mean square, RMS)達到幾百微米甚至幾十微米量級(工作波長的五十分之一)[4]。然而,地面重力載荷、制造、裝配和在軌的熱輻射載荷均可引起反射器的形面精度下降。因此,為了保證反射器的形面精度,在軌形面主動控制是一個有效的解決途徑[5-6]。
為了實現天線反射器的形面主動控制,反射器需要有主動執行機構。這類帶有主動執行機構的反射器稱為主控天線反射器。主控天線反射器的基體結構一般采用碳纖維復合材料(CFRP)制造,通過壓電作動器對其進行主動形面控制。一方面由于CFRP具有高剛度、低密度和高強度等優點,并可以通過鋪層設計改變基體結構的力學性能[7-8];另一方面由于壓電作動器具有響應速度快、定位精度高、作用頻帶寬等優點[9]。對于主控天線反射器,合理的基體結構和壓電作動器的集成優化設計可以提高反射器的形面控制性能、減小控制能量輸入和反射器的熱變形。主控天線反射器屬于壓電智能結構,對于壓電智能結構的優化設計,國內外許多研究單位均開展了相應的研究工作。文獻[10-11]給出了壓電智能結構優化設計的詳細文獻綜述。由于作動器的位置與振動控制的性能密切相關,因此大部分的研究工作是預先確定基體結構的幾何尺寸和少量的作動器,優化作動器的位置,其基體結構大多為懸臂板或梁結構,所采用的優化準則通常衡量振動控制性能,如最大可控度[12]、最大能量吸收率[13]和控制能量最小[14]等。另一部分工作主要是給定作動器的數量、尺寸和位置,采用拓撲優化確定材料的最優結構連通性[15]。
智能結構優化設計更好的方法應是同時優化作動器參數和結構參數的集成優化設計。Begg和Liu[16]考慮了作動器的橫截面積和作動器的位置參數優化設計了主動桁架。Correia等[17]以PZT5H壓電驅動的玻璃纖維懸臂板為研究對象,采用模擬退火算法(SA)同時優化作動器的位置和玻璃纖維懸臂板鋪層角度參數。Wang等[18]以壓電宏纖維復合材料(MFC)的CFRP懸臂板為研究對象,研究了作動器的位置、MFC纖維方向和鋪層角度參數對尖端擾度和扭轉角度的影響。上述的集成優化設計方法針對不同的目標函數均給出了合理的設計方案。然而,研究中均以少量作動器、簡單的梁或板結構為研究對象,對于多作動器的復雜主控反射器并沒有涉及。
本文將以主控格柵反射器為研究對象,開展反射器的集成優化設計研究。考慮到反射器面外變形的RMS是評價天線性能的重要指標,將作動器在一定電壓和熱載荷下反射器面外靜態變形的RMS分別代表控制性能和熱變形,以控制性能最大和熱變形最小開展單目標和多目標的集成優化設計研究。
1 主控格柵反射器系統
主控格柵反射器結構如圖1所示,該反射器由反射器基體結構和PZT壓電作動器兩部分組成,其中反射器基體結構由反射面和背部U型肋組成。單節U型肋在總體坐標系oxyz下以60°為間隔陣列分布在反射面上,每個六邊形的主對角線上有6節U型肋。PZT壓電作動器通過機械連接件和預緊螺母安裝在每一小節U型槽中間,反射器背部邊緣肋是矩形肋并沒有安裝作動器,因此反射器背部一共有72個PZT壓電作動器。壓電作動器沿著作動器軸線方向極化,利用d33逆壓電效應驅動作動器。對PZT壓電作動器的電極施加電壓后,作動器產生面內應變。由于PZT壓電作動器安裝在U型肋內并偏離于中性軸,這個面內應變將導致整體的面外彎曲變形,從而實現對反射器的形面控制。

圖1 主控格柵反射器結構示意圖
1.1 主控格柵反射器的有限元模型
采用ANSYS建立格柵反射器有限元模型。反射面和背部的U型肋采用8節點四邊形殼單元,如圖2(a)所示。其中,orexreyrezre為反射面單元坐標系,其方向與總體坐標系方向一致。由于PZT壓電作動器僅沿軸向(x3方向)伸長或縮短,因此PZT壓電作動器采用2節點的單自由度軸力桿單元,如圖2(b)所示。其中,o1x1x2x3為軸力桿單元坐標系。假設反射面、背部U型肋和PZT壓電作動器彼此之間完美的組裝,因此在ANSYS中通過共節點處理反射面單元和背部U型肋單元的連接問題。在有限元模型中忽略了PZT作動器與U型肋間的機械連接件。由于U型肋單元與PZT壓電作動器單元節點的自由度不匹配,采用自由度耦合來處理它們之間的連接。ANSYS沒有提供壓電桿單元,本文采用熱載荷比擬法建立PZT壓電作動器驅動電壓與熱載荷之間的比擬關系,通過溫度載荷來模擬壓電作動器的驅動電壓[19]。

圖2 格柵反射器系統單元
采用有限元法,反射面和U型肋單元的動力學方程可表示為
(1)

PZT壓電作動器由壓電陶瓷片堆疊而成。假設壓電陶瓷片具有相同的幾何參數和材料參數。采用哈密頓原理可以推導出PZT壓電作動器單元的動力學方程為[20]
(2)

(3)
其中,
(4)

作動器施加電壓后產生的驅動力可以用熱彈性力來模擬。利用ANSYS對作動器施加溫度載荷時,熱彈性力可以表示為
(5)
其中,
(6)

比較式(4)和式(6)可以看出,只要熱膨脹系數滿足下式,
(7)
那么相同電壓和溫度所產生的壓電驅動力和熱彈性力是相等的。因此可將PZT壓電作動器驅動電壓比擬為熱載荷。將熱彈性力代替壓電作動器驅動力,PZT單元的動力雪平衡方程可以改寫為
(8)
通過組裝所有單元,可以得到全局動力學方程為
(9)
式中:M和K分別表示結構整體質量和剛度矩陣;u為節點位移矩陣;G為輸入矩陣;t為溫度載荷矩陣,它與作動器輸入電壓是等效的,其維度與作動器個數一致;f為外載荷矩陣。
在天線反射器的設計中,頻率約束,尤其是頻率的下限約束是非常重要的。頻率的下限約束能夠確保反射器具有足夠的剛度。反射器結構的頻率可以通過求解下式的特征值問題得到
(K-ω2M)Φ=0
(10)
式中:ω為自然頻率,Φ為模態矩陣。
對于在軌運行的天線反射器,外載荷變化緩慢,可將反射器結構的變形過程作為靜態或準靜態過程進行分析。由于反射面的面外變形是影響天線電性能的主要因素。因此,在反射器的集成優化設計中,主要關心的是反射面的面外靜態變形。此面外靜態變形可由下式計算得到
(11)

1.2 有限元建模方法驗證
本文主要基于反射器的靜態變形位移優化設計基體結構參數和PZT壓電作動器參數。考慮到薄殼結構和平面薄板結構具有相似的力學特性,因此本文采用平面六邊形格柵反射器模型,通過對比在一定電壓下實測反射面傳感點和有限元預測的靜態位移以驗證建模方法的準確性。詳細的驗證過程參考附錄A。從附錄A的比較結果可以看出,所建立的有限元模型能夠捕捉到反射面的變形趨勢,建模方法是有效的。因此,在接下來的研究中,采用第1.1節的有限元建模方法建立六邊形拋物面格柵反射器的參數化模型,開展反射器優化設計的研究。
2 集成優化設計方法
集成優化設計的目的是通過優化作動器和結構參數來提高反射器的性能。本節詳細分析了主控格柵反射器主要關心的目標函數和影響目標函數的主要設計參數,給出了反射器的集成優化設計問題和優化過程。
2.1 目標函數的確定
考慮到反射器在軌工作期間熱載荷是引起形面誤差的主要來源,希望熱載荷引起的反射器熱變形盡可能小,因此將反射面的熱變形最小作為一個優化設計目標。為了滿足反射器在軌形面精度需求,反射器的形面誤差需要通過作動器驅動控制。希望反射器具有強控制能力,進而能夠有效地控制反射器的形面誤差并減少控制輸入能量,因此將形面控制能力最大作為另一個優化設計目標。
由于反射面的面外變形的RMS通常用于評估天線的性能。因此,在本研究中,反射器基體結構在-152 ℃溫度均布載荷下,反射面節點面外靜態變形的RMS代表熱變形。-152 ℃溫度均布載荷是春分時刻地球同步軌道反射器進入陰影區極端條件下的熱載荷[21]。雖然軌道熱分析仿真中反射器上存在溫度梯度,但溫度梯度很小,可以忽略不計。因此,熱變形目標函數可表示為

(12)

如前所述,主控格柵反射器的形面誤差可以使用PZT壓電作動器主動控制。形面控制能力表征為反射器調整形面誤差的能力。作動器在一定電壓下反射面產生的面外變形位移越大,其控制能力也就越大。由于反射器在不同的軌道位置具有不同的形面誤差,將所有作動器施加一定電壓,反射面產生的面外變形能力代表形面控制能力。在形面控制過程中,作動器頻繁施加高電壓會減少作動器的使用壽命,此外在高壓下還會導致電壓-位移關系趨于非線性[22],增加控制器設計的難度。因此,將所有作動器施加80 V電壓,反射面節點面外靜態變形的RMS代表形面控制能力。那么,代表控制能力的目標函數可表示為

(13)

2.2 設計變量的選擇與約束條件
本文主要目的是優化設計一個內切圓直徑1 m和焦距2.1 m的六邊形拋物面反射器,以提高反射器的性能。圖1為反射器結構示意圖。由于反射器背部結構為單節U型肋在總體坐標系oxyz下以60°為間隔陣列分布在反射面上,因此U型肋的幾何參數,包括:開槽長度、肋高度和開槽高度是影響反射器性能的主要參數。此外,PZT壓電作動器安裝在每一節U型槽的中間。在總體坐標系oxyz下,作動器的安裝位置隨著開槽高變化而變化,作動器的長度隨著開槽長度的變化而變化。PZT壓電作動器由相同橫截面和厚度的壓電陶瓷片堆疊組成,作動器越長代表其堆疊的壓電陶瓷片越多,提供的變形位移就越大。由于單層CFRP具有正交各項異性的力學性能,因此反射面和U型肋的鋪層角度是主要的設計參數。為了避免反射器固化后翹曲變形,反射面和U型肋均為8層CFRP且對稱鋪層。反射面和U型肋具有相同的厚度,主要影響反射器的彎曲剛度。因此,反射面和U型肋的厚度是主要的設計參數。綜上所述,設計變量包括反射面的鋪層角度、U型肋的鋪層角度、U型肋的幾何參數以及反射面和U型肋的厚度。圖3給出了設計變量示意圖,圖中orexreyrezre和ouexueyuezue分別為反射面和U型肋單元坐標系,用于定義鋪層角度。orexreyrezre方向與總體坐標系oxyz方向一致。ouexueyuezue的xue軸為沿著U型肋的長度方向,ze軸垂直于U型肋的平面向外,yue軸方向符合右手螺旋準則垂直于xue軸和zue軸。設計變量可由下式表示為

圖3 設計變量示意圖
Var=[θ1,…,θ4,φ1,…,φ4,hr,hs,ls,hc]
(14)
式中:θ1,…,θ4為反射面鋪層角度,其鋪層角表示為纖維方向與xre軸的夾角,逆時針為正;φ1,…,φ4為U型鋪層角度,其鋪層角表示為纖維方向與xue軸的夾角,逆時針為正;hr,hs和ls分別為U型肋的肋高度、開槽高度和開槽長度;hc為每層CFRP厚度。
設計變量受到一些約束,可表示為
(15)
式中:反射面鋪層角度θi以Δθ為間隔在θmin和θmax之間變化,U型肋的鋪層角度φi以Δφ為間隔在φmin和φmax之間變化,hr,min和hr,max分別為U型肋高的上限和下限,hs,min和hs,max分別為開槽高的上限和下限,ls,min和ls,max分別為開槽長的上限和下限,hc,min和hc,max分別為每層碳纖維層厚度的上限和下限,Δ1和Δ2為變化間隔,h0為U型肋高hr和開槽高hs之差的下限。
反射器基頻是反射器結構設計的重要參數。反射器應施加基頻的下限約束,其下限約束一般滿足兩方面要求:一方面,反射器基頻的下限約束反應了反射器的最低剛度。設置下限約束避免反射器過于柔性,過于柔性將導致反射器易受外載荷影響產生大的變形甚至激發產生振動且不利于形面保持。另一方面,反射器的基頻應根據實際航天器的要求確定。航天器一般采用頻帶隔離的方法以避免不同組件間以及控制系統的共振。基頻的下限約束如下式
ω≥ω0
(16)
在優化過程的節點位移和頻率計算中,主控格柵反射器的約束區域為:反射器距離反射器幾何中心5 mm的6個U型肋上的矩形區域全自由度約束,如圖4所示。

圖4 U型肋幾何約束
2.3 優化過程和求解
第2.1~2.2節給出了優化問題的三要素:目標函數、設計變量和約束條件。本研究中采用遺傳算法(GA)對優化問題進行求解。對于單目標問題采用MATLAB優化工具箱的遺傳算法ga函數進行求解。對于多目標優化問題采用基于非支配排序遺傳算法(NSGA-II)的gamultiobj函數進行求解,它會產生一系列的最優解集,稱為帕累托(Pareto)最優前沿[23]。由于ga函數和gamultiobj函數是處理最小值問題,因此將目標f1和目標f2的倒數1/f2作為適應度函數。由于設計變量是按照等間隔離散,對于間隔不為1的設計變量,可將設計變量轉化為連續的整數。以鋪層角度為例,假設θi在-90°~90°之間以15°為間隔離散。那么,可將θi的取值轉化為0~12之間連續的整數,其中取值0對應θi=-90°,取值1對應θi=-75°,以此類推。對于不滿足基頻和hr-hs≥h0約束的設計變量,相應的適應度值設置為很大的值,從而保證優化結果在約束內并向最優方向搜索。由于gamultiobj函數沒有整數約束,可先對設計變量取整,然后再計算個體的適應度函數。優化過程的基本參數設置為:種群大小為100,交叉概率為0.8,變異概率為0.2。收斂條件設置為:最優適應度值相對于平均適應度值的變化小于1×10-6。
3 結果和討論
本研究中通過數值算例1~3分別給出單目標和多目標的優化結果。仿真算例為:
算例1:目標2
算例2:目標1
算例3:目標1+目標2
數值仿真中θmin=φmin=-90°,θmax=φmax=90°,Δθ=Δφ=15°,ω0=25 Hz。U型肋設計變量的幾何約束如表1所示。反射器基體結構和PZT壓電作動器的材料參數如表A1所示。表2給出了算例1和2詳細的優化結果。從表2可以看出,算例1的目標值為0.376 mm,U型肋高和開槽高均為下限,這使得反射器具有較低的剛度。開槽長度為上限表明PZT作動器的長度也為上限,作動器有最大的變形位移。增加CFRP厚度可增加反射器整體結構剛度,但優化結果中CFRP厚度接近上限,這主要是由于基頻約束的影響。反射器主要通過調整鋪層角度和增加碳纖維層的厚度以增加反射器的剛度,從而滿足基頻的要求。

表1 U型肋設計變量的幾何約束

表2 算例1和2優化結果
算例2中的目標值為0.0137 mm,反射面的鋪層角度為雙正交鋪層,雙正交鋪層使得反射面具有較低的熱膨脹系數[24]。反射面和U型肋的厚度為約束上限,增加了反射器結構整體的剛度。U型肋的肋高并沒有取約束上限,這與文獻[3]中以不帶主動執行機構的格柵反射器為研究對象,增加肋高可以減少熱變的結果不同。將肋高取為約束上限,其他優化結果不變,目標值為0.048 mm,明顯大于算例2中的優化結果。一個可能的原因是增加肋高增加了結構剛度,但同時也增加了受熱面積。增加受熱面積對熱變形的影響大于增加的結構剛度。
應用算例1設計變量優化結果,計算熱變形目標1,目標1的值為4.7 mm。對比算例1控制能力和熱變形可以看出,熱變形遠大于控制能力,無法通過形面控制調整熱載荷引起的形面誤差。因此有必要綜合考慮多個目標,開展多目標的優化設計研究。
圖5給出了算例3多目標最優問題的Pareto最優前沿。表3給出了詳細的優化結果。Pareto最優前沿給出了特定條件下多目標問題的最優解集,需要設計人員根據權重分配得到對應的Pareto最優解。從圖 5可以看出,許多解的熱變形大于控制能力,因此在選取時應考慮反射器是否有能力控制熱變形引起的形面誤差。通過Pareto最優前沿可以更清楚地看出兩個目標的關系,能夠給出更合理的設計方案。

圖5 多目標Pareto最優前沿
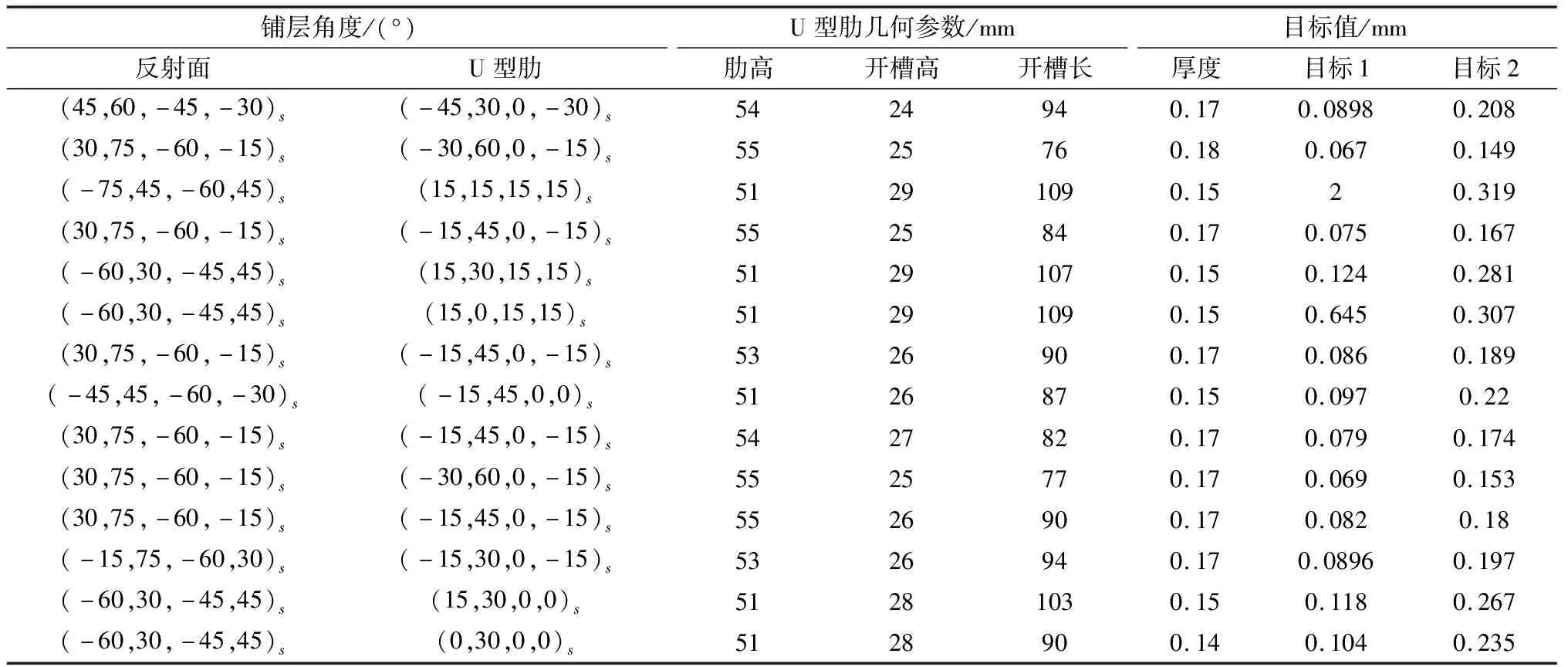
表3 算例3優化結果
4 結 論
本文建立了主控格柵反射器的有限元模型,以反射器的形面控制能力最大和熱變形最小為優化目標,以鋪層角度、鋪層厚度、U型肋的幾何參數和壓電作動器長度為設計變量,分別開展了單目標和多目標的集成設計優化研究。研究結果表明:
1)通過優化設計變量可以顯著提高形面控制能力和減小熱變形。
2)控制能力最大的單目標優化結果,其熱變形遠大于控制能力,這將導致反射器無法通過形面控制調整熱載荷引起的形面誤差。
3)多目標的Pareto最優前沿可以給出更合理的設計方案。
附錄A:建模方法驗證過程
該附錄搭建平面六邊形格柵反射器實驗模型,通過對比在一定電壓下實測反射面傳感點的靜態位移來驗證本文建模理論方法的準確性。如圖A1所示,主控格柵反射器模型背部安裝30個PZT壓電作動器。反射面和U型肋均為8層CFRP復合材料,每層厚為0.125 mm,鋪層方向為(0°,45°,-45°,90°)s。30個動器由作動器控制器功率放大并加載。每節U型肋長189 mm、高40 mm、開槽長度100 mm、開槽深度20 mm。反射器邊界條件為:距離反射器幾何中心10 mm間隔120°的3個U型肋上全自由度約束。形面測量選用數字圖像相關(DIC)攝影測量系統,該系統由兩個工業相機、測量控制器、測量軟件、兩個LED光源組成,其測量精度為10 μm+10 μm/m。整個系統安裝在Newport光學平臺上以減小外界振動的影響。

圖A1 格柵反射器實驗系統
反射器的有限元模型與物理模型具有相同的鋪層、幾何參數和邊界條件。表A1給出了單層CFRP材料參數和PZT壓電作動器參數。在模型驗證中,所有作動器施加40 V電壓。圖A2(a)和圖A2(b)分別給出了實驗測得和有限元預測的位移響應。從圖A2(a)和圖A2(b)可以看出實驗測量和有限元預測的靜態變形趨勢是一致的。實驗測量和有限元模型預測靜態位移的最大值分別為127 μm和143 μm,其相對誤差為12.5%,這主要是因為材料屬性的預測誤差和不同結構部件之間完美組裝假設導致的。上述的比較結果表明,所建立的有限元模型能夠捕捉到反射面的變形趨勢,建模方法是有效的。
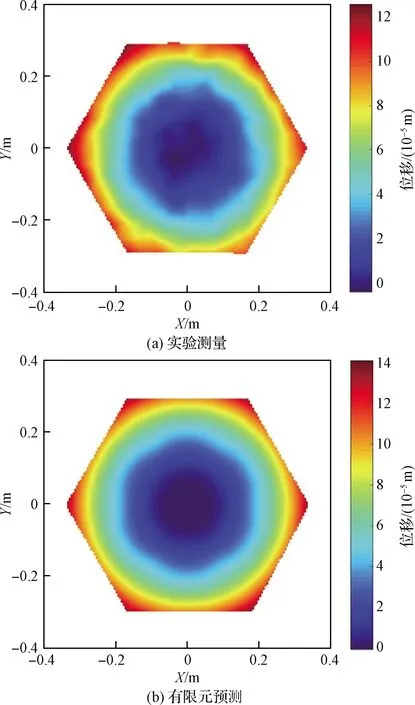
圖A2 實驗測量和有限元預測位移響應云圖

表A1 單層CFRP和PZT作動器材料參數
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中華詩詞(2020年1期)2020-09-21 09:24:52
藝術啟蒙(2018年7期)2018-08-23 09:14:18
小學生作文(中高年級適用)(2018年5期)2018-06-11 01:22:56
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
中學生數理化·七年級數學人教版(2017年11期)2017-04-23 07:18:00
