基于序列凸規(guī)劃的運載火箭軌跡在線規(guī)劃方法
2021-03-13 08:28:26程曉明王晉麟姚寅偉
宇航學報 2021年2期
程曉明,尚 騰,徐 帆,王晉麟,姚寅偉
(北京航天自動控制研究所,北京 100854)
0 引 言
隨著世界各航天強國對外層空間開發(fā)與利用的不斷深化,運載火箭需要在處理故障與自主飛行方面具有更強的自主控制能力[1]。因此,軌跡在線規(guī)劃技術已成為運載火箭未來進入空間的一項關鍵技術,該技術賦予火箭自主規(guī)劃與故障應變能力,能夠極大地提升火箭執(zhí)行任務的靈活性與完成新型任務的能力,也可節(jié)省飛行成本[2]。
由于大氣層內(nèi)火箭軌跡規(guī)劃模型的復雜性,在面對突發(fā)任務、故障情況時,如何快速、可靠地求解出最優(yōu)飛行軌跡,是目前火箭控制中的難點之一[3]。近幾十年來,國內(nèi)外學者在軌跡規(guī)劃方法上的研究主要分為基于最優(yōu)控制原理的間接法和基于數(shù)值優(yōu)化的直接法。如文獻[4-8]基于間接法的思想,研究了氣動影響下的最優(yōu)軌跡規(guī)劃方法,通過求解包含橫截條件的兩點邊值問題的思路,對最優(yōu)軌跡進行直接求解。這種方法形式簡單,但較為依賴初始協(xié)態(tài)猜想,收斂速度較慢,導致其實用性大打折扣。
隨著計算機技術的發(fā)展及其運算能力的提升,基于數(shù)值方法的直接法得到較快的發(fā)展[9]。如文獻[10-15]利用直接多步打靶法、偽譜法等對火箭的軌跡規(guī)劃進行了大量的研究,驗證了直接法應用于火箭軌跡規(guī)劃上的有效性。這些方法的優(yōu)化結(jié)果精度較高,但由于離散變量多,計算量大,導致算法的實時性不足。另外,這些算法在理論上缺少收斂性證明。
為了進一步保證數(shù)值算法的收斂性與實時性,將軌跡規(guī)劃問題轉(zhuǎn)化為一個凸規(guī)劃問題,能利用凸規(guī)劃求解算法(如內(nèi)點法)所具有的多項式時間收斂特性,以同時滿足算法收斂性與實時性要求。近年來,文獻[16-17]利用凸優(yōu)化理論研究了火星著陸在線軌跡規(guī)劃問題,文獻[18-19]針對大氣層外入軌問題的軌跡規(guī)劃問題,研究了基于凸優(yōu)化的軌跡規(guī)劃方法。然而,對于地球大氣層內(nèi)的運載火箭軌跡規(guī)劃問題,其氣動模型的復雜性使其不能簡易的轉(zhuǎn)化為凸規(guī)劃問題而得到求解,因此,需要進一步研究大氣層內(nèi)火箭軌跡規(guī)劃問題的快速求解方法。
序列凸規(guī)劃[20]是一項求解非凸規(guī)劃問題的局部優(yōu)化方法,通過序列逼近的方式,將原非凸規(guī)劃問題轉(zhuǎn)化為序列凸規(guī)劃問題,并進行序列求解。文獻[21]通過序列線性化的方式,將序列凸優(yōu)化應用于航天器的軌跡優(yōu)化中。文獻[22-24]基于序列凸規(guī)劃的思想,研究了火箭的自主軌跡規(guī)劃方法。但在目前的這種方式中,模型的凸化均是基于對非線性模型的線性化方式,這種方式會造成任務狀態(tài)變化較大時軌跡在線規(guī)劃模型的失準,且依賴初始猜想軌跡,對任務的適應性較弱。
本文基于序列凸規(guī)劃思想,研究了一種模型補償序列凸規(guī)劃方法,該方法不需要初始猜想,其核心思想是序列地利用前一次規(guī)劃得到的最優(yōu)軌跡,補償下一次迭代時軌跡規(guī)劃問題中動力學的非線性項(軸向力加速度、法向力加速度和重力加速度)與過程約束,直到前后兩次迭代的最優(yōu)解收斂。通過在序列凸規(guī)劃問題中增加柯西約束,保證得到的序列最優(yōu)解為一組柯西序列,從而保證了該方法的收斂性。最后針對火箭上升段與著陸段的軌跡規(guī)劃問題對該算法進行仿真校驗。
1 火箭軌跡規(guī)劃問題描述
1.1 火箭運動方程
在發(fā)射點慣性坐標系下,建立火箭的運動方程為:
(1)
式中:r=[x,y,z]T表示位置,v=[vx,vx,vx]T表示速度,m為飛行器質(zhì)量,g=[gx,gx,gx]T表示重力加速度,T=[Tx,Tx,Tx]T表示飛行器推力。Isp為飛行器的比沖,g0為海平面的重力加速度大小。A和N分別為飛行器氣動力中的軸向力與法向力。
1.2 約束與性能指標
1.2.1控制約束與狀態(tài)約束
假設飛行器的比沖不隨飛行狀態(tài)改變,但推力可以通過節(jié)流閥門進行調(diào)節(jié),根據(jù)節(jié)流閥的最小與最大節(jié)流程度,可得推力的約束范圍為:
(2)
通常,飛行器的當前狀態(tài)作為初始端點約束
s(t0)=s0∈R7
(3)
(4)

令飛行器的凈重為mdry,初始質(zhì)量m0,飛行器的燃料約束描述如下:
M={m(t)∈R+:mdry≤m(t)≤m0, ?t∈[0,tf]}
(5)
1.2.2過程約束
火箭在大氣層內(nèi)飛行時,考慮三種常見的過程約束:動壓約束、軸向過載約束和彎矩約束。
(6)
(7)
|qα|≤Qα max
(8)
式中:qmax,amax和Qα max分別為動壓約束、軸向過載約束和彎矩約束的最大允許值。α為飛行器的攻角,由飛行器體軸與速度軸的夾角構成。
1.2.3性能指標
考慮最省燃料這一性能指標:
(9)
由于飛行器的質(zhì)量是單調(diào)遞減的,因此可將最省燃料的性能指標(9)轉(zhuǎn)化為梅耶(Mayer)形式:
minJ=-m(tf)
(10)
因此,本文火箭軌跡規(guī)劃問題的主要目標便是求解最優(yōu)的推力矢量T(t)∈R3,使其滿足各約束的同時,令性能指標(式(10))最小。
2 基于序列凸規(guī)劃的軌跡規(guī)劃方法
2.1 模型補償序列凸規(guī)劃方法
模型補償序列凸規(guī)劃方法的核心是如何序列地補償大氣層內(nèi)軌跡規(guī)劃問題中的非線性項,使其逼近真實的氣動加速度模型與重力加速度模型,因此,為了在后續(xù)方法設計中對這些非線性項進行較為直觀的處理,將火箭的動力學方程重新描述為:
(11)

并將控制量增廣為:η=[υ,uT]T,控制約束可以重新寫為:
(12)
0≤Tmine-Z≤υ≤Tmaxe-Z
(13)
U(t)={η(t)=[υ(t),uΤ(t)]Τ∈R4:
0≤Tmine-Z[k-1](t)≤υ(t)≤Tmaxe-Z[k-1](t)
(14)
由于軸向力加速度a、法向力加速度n、重力加速度g以及過程約束的非線性,導致該問題無法得到快速求解,因此本文研究了模型序列補償?shù)姆绞剑缘姆绞綄@些非線性項進行逐步逼近,最終收斂到真實的模型,并提出了針對大氣層內(nèi)火箭軌跡規(guī)劃問題的模型補償序列凸規(guī)劃方法。
2.1.1模型序列補償方法
模型序列補償方法的實現(xiàn)策略是,在第一次迭代中,將動力學中的非線性項建模為時間的線性函數(shù),并將非凸最優(yōu)控制問題轉(zhuǎn)化為一個凸規(guī)劃問題進行求解;然后在后續(xù)迭代中,利用前一次迭代產(chǎn)生的最優(yōu)解對這些非線性項模型進行序列補償,直到其收斂到真實模型。
為了便于描述,將動力學中的非線性項(包括重力加速度、氣動力)以一個新的變量表示:
ψ(t)=g(t)+a(t)+n(t)
(15)
在序列迭代補償方案設計中,在序列補償?shù)牡谝淮诬壽E優(yōu)化時,根據(jù)軌跡規(guī)劃任務的始末狀態(tài),將自動給出這些非線性項的初始線性猜想,其次基于該模型形成的凸規(guī)劃問題,利用凸優(yōu)化方法進行快速軌跡求解,然后將前一次得到的結(jié)果對下一次優(yōu)化時動力學模型中的ψ(t)進行補償。表示如下:
ψ(k+1)(t,s(k))=g(k)(t,s(k))+a(k)(t,s(k))+
n(k)(t,s(k))
(16)
通過上述補償方式,可以將火箭軌跡規(guī)劃問題轉(zhuǎn)化為序列求解凸規(guī)劃問題,直到模型ψ(t)收斂。
2.1.2過程約束的序列凸化
在模型補償序列凸規(guī)劃方法中,對過程約束的凸化采用了利用前一次迭代產(chǎn)生的最優(yōu)解對后續(xù)迭代中的過程約束進行序列凸化的策略。主要包括:
1)動壓約束
通過分析動壓函數(shù)對高度和速度的海森陣可知,動壓約束(6)不是一個凸約束。
為了滿足本文所提出的算法在求解最優(yōu)控制問題時對凸模型的需求,利用前一次迭代得到的最優(yōu)解,對動壓約束進行如下近似:
(17)
2)軸向加速度約束
根據(jù)前文所述的變量替換方法,軸向加速度約束可以基于前一次迭代得到的重力加速度,寫為:
(18)
因此,軸向加速度約束可以簡單的轉(zhuǎn)化為凸約束。
3)彎矩約束

(19)

(20)
此時,通過利用前一次迭代的最優(yōu)軌跡結(jié)果將過程約束轉(zhuǎn)化為凸約束
2.1.3凸模型下的大氣層內(nèi)火箭軌跡規(guī)劃問題
通過對控制量約束、動力學模型與過程約束進行序列凸化后,非凸的大氣層內(nèi)火箭軌跡規(guī)劃問題可以建模為凸最優(yōu)控制問題(21)。
η∈U(t),s∈Χ(t),[s,η]∈P(t),s(t0)=s0
U(t)={η(t)=[(υ(t),uΤ(t)]Τ∈R4:
0≤Tmine-Z[k](t)≤υ(t)≤Tmaxe-Z[k](t)
Χ(t)={s(t)∈R7:smin≤s(k)≤smax,
Z(t)≥ln(mdry)}
(21)
2.2 基于模型補償序列凸規(guī)劃對火箭軌跡規(guī)劃算法描述
采用等間隔方法,對凸最優(yōu)控制問題(21)進行離散。通過將時間區(qū)間進行離散、并將最優(yōu)控制問題中的各種約束限制在每個離散點上的方式,將無窮維的連續(xù)線性凸最優(yōu)控制問題轉(zhuǎn)化為有限維的參數(shù)優(yōu)化問題。由于該最優(yōu)控制問題中的約束均為線性約束或二階錐約束,因此離散后將得到一個二階錐規(guī)劃問題,從而可以使用有效的凸優(yōu)化求解方法對其進行實時求解。
對于給定的時間區(qū)間[0,tf],取等間隔時間區(qū)間為Δt,那么每個離散點對應的時刻為:
tk=nΔt,n=0,…,N
(22)
式中:N=tf/Δt為離散點的個數(shù)。控制變量采用零階保持,即在時間區(qū)間t∈[tn,tn+1)內(nèi),控制量為ηn=η(tn)。

基于上述狀態(tài)變量與控制變量的離散和已知的時間區(qū)間,式(21)所描述的連續(xù)凸最優(yōu)控制問題可以轉(zhuǎn)化為一個離散凸最優(yōu)控制問題:
(23)
式中:上標(k+1)代表第(k+1)次迭代,即當前迭代,下標n代表第n個離散點。由式(23)確定的最優(yōu)控制問題中的動力學方程可以看作是一個線性時不變方程。僅有ψ(k+1)會隨著時間改變,但其各離散點的值均已知。性能指標函數(shù)為關于終端狀態(tài)的凸函數(shù),可以將其離散為關于最后一個離散點處狀態(tài)的函數(shù),該函數(shù)的凸性不變。因此,可以認為式(23)這一離散凸最優(yōu)控制問題可以逼近原連續(xù)凸最優(yōu)控制問題(21)。
式(23)中的離散狀態(tài)空間矩陣為:
(24)
其中,η=[uΤ,υ]Τ;矩陣Ac,Bc和Cc分別為
(25)
(26)
(27)
在完成凸規(guī)劃問題的離散建模后,該問題可利用原始-對偶內(nèi)點法對其進行快速求解。因此,在進行火箭軌跡規(guī)劃算法設計時,基于模型序列補償方法,對離散凸規(guī)劃問題進行重復求解,當max(s(k+1)-s(k))
定理1.當給定的初始離散設計變量在可行域內(nèi)時,即Y(0)∈M?RNY,模型補償序列凸規(guī)劃算法在有限次迭代后能夠收斂到定點最優(yōu)解Y*∈M。
證.由于本文提出的模型補償序列凸規(guī)劃算法增加了柯西約束:
(28)
在迭代解的更新中,序列凸規(guī)劃算法自映射迭代算子:φ:M?RNY→M?RNY表示離散可行設計變量Y(k)的更新,即輸入由前一次迭代k得到的全體設計變量Y(k),該算子能夠在迭代k+1中得到狀態(tài)量Y(k+1):
Y(k+1)=φ(Y(k))
(29)
當增加了式(28)描述的柯西約束后,可知離散凸優(yōu)化模型補償?shù)蛄衁(k)=φ(Y(k-1))=φ(k)(Y(0)),k=1,2,…,M為一個柯西序列。當式(29)給出的柯西序列有界時,該柯西序列可收斂到定點最優(yōu)解Y*=φ(Y*)∈M。
定理2.假設由式(23)表示的離散凸最優(yōu)控制問題通過模型補償序列凸規(guī)劃算法,收斂到一個離散最優(yōu)解Y*,那么由這個解逼近得到的連續(xù)解([r*,v*,m*],T*)是原非凸最優(yōu)控制問題的一個局部最優(yōu)解。
證.首先假設由式(23)表示的離散凸最優(yōu)控制問題,在模型補償序列凸規(guī)劃算法下,收斂到一個離散的最優(yōu)解Y*=(s*,η*)。根據(jù)本文對連續(xù)最優(yōu)控制問題的離散化描述,離散方法能夠逼近連續(xù)凸最優(yōu)控制問題(21),因此連續(xù)凸最優(yōu)控制問題(21)的最優(yōu)解(s*,η*)可以由Y*逼近得到,并在此假設(s*,η*)與Y*等價。
對于由式(23)描述的最優(yōu)控制問題,矩陣Ac,Bc和Cc均為時不變矩陣,該問題的可控性克萊姆矩陣為:
(30)
式中:Φ(t,τ)為狀態(tài)轉(zhuǎn)移矩陣,Φ(t,τ)=eAc(t-τ)。
由于狀態(tài)轉(zhuǎn)移矩陣Φ(t,τ)在任意時間區(qū)間處均為滿秩,即rank(eAc(t-τ))=7,且rank(Bc)=4,可知,null(eAc(t-τ)Bc)=0,因此可知可控性克萊姆矩陣是W(t)非奇異的,最優(yōu)控制問題(23)中由[Ac,Bc]確定的連續(xù)線性動力學是可控的。
在可控性基礎上,根據(jù)文獻[16]可知,變量替換后控制量約束的松弛凸化是無損的,因此可知在每次迭代Ψ(k+1)都已知的情況下,式(21)表示的連續(xù)凸最優(yōu)控制問題的最優(yōu)解(s*,η*),也是控制量約束“松弛”處理前的線性非凸最優(yōu)控制問題的最優(yōu)解(s*,u*)。
由離散最優(yōu)解Y*是一個定點最優(yōu)解,可知(s*,u*)也為定點最優(yōu)解。這意味著動力學非線性項Ψ(k+1)通過序列凸化,最后能夠收斂,因此(s*,u*)也是原始非凸最優(yōu)控制問題的局部最優(yōu)解。此時,通過變量反替換可知,與(s*,u*)對應的([r*,v*,m*],T*)是原非凸最優(yōu)控制問題的一個局部最優(yōu)解。
總結(jié)上述基于模型序列補償凸規(guī)劃的火箭軌跡規(guī)劃算法,下面將算法流程描述如下。

第二步:基于線性化后的重力/氣動加速度猜想值與過程約束凸化方法,利用無損凸化與變量替換技術,將軌跡規(guī)劃問題轉(zhuǎn)化為凸規(guī)劃問題,并進行求解后儲存為軌跡k,軌跡狀態(tài)為s(k)。
第三步:計算軌跡k上狀態(tài)s(k)對應的重力/氣動力加速度值g(s(k)),a(s(k))和n(s(k)),將其補償?shù)阶顑?yōu)控制問題(23)的建模中。
第四步:求解式(23),得到軌跡k+1。
第五步:如果軌跡k+1與軌跡k中對應狀態(tài)的差小于允許的閾值,則停止程序;否則,令k=k+1,返回第三步。
3 數(shù)值仿真與分析
為了檢驗本文所提出模型補償序列凸規(guī)劃方法的有效性,以火箭大氣層內(nèi)軌跡在線規(guī)劃任務為背景,對該方法進行仿真校驗。數(shù)值仿真平臺為PC機,性能為Inter Core i7-6700 3.4 GHz,仿真軟件采用了MATLAB2014a,其中的凸優(yōu)化求解軟件采用了CVX工具箱[25]。
本節(jié)主要通過大氣層內(nèi)軌跡規(guī)劃的兩個方面進行數(shù)值仿真實驗設計:1)火箭上升段軌跡自主規(guī)劃仿真;2)火箭著陸段軌跡自主規(guī)劃仿真。
3.1 火箭上升段軌跡自主規(guī)劃仿真與分析
火箭上升段軌跡自主規(guī)劃仿真采用的火箭模型以及基本任務參數(shù)設置如表1所示。
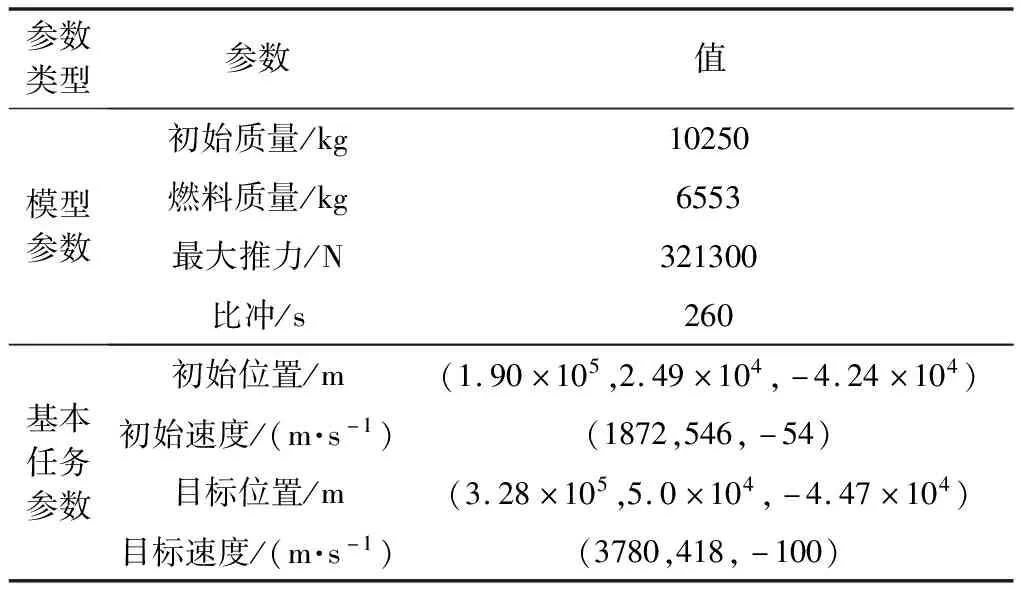
表1 上升段火箭模型與任務參數(shù)設置
圖1中,標記“·”的曲線代表最后一次迭代得到的最優(yōu)推力大小曲線。圖2中,標記“·”的曲線代表最后一次迭代得到的最優(yōu)俯仰角和偏航角指令曲線。
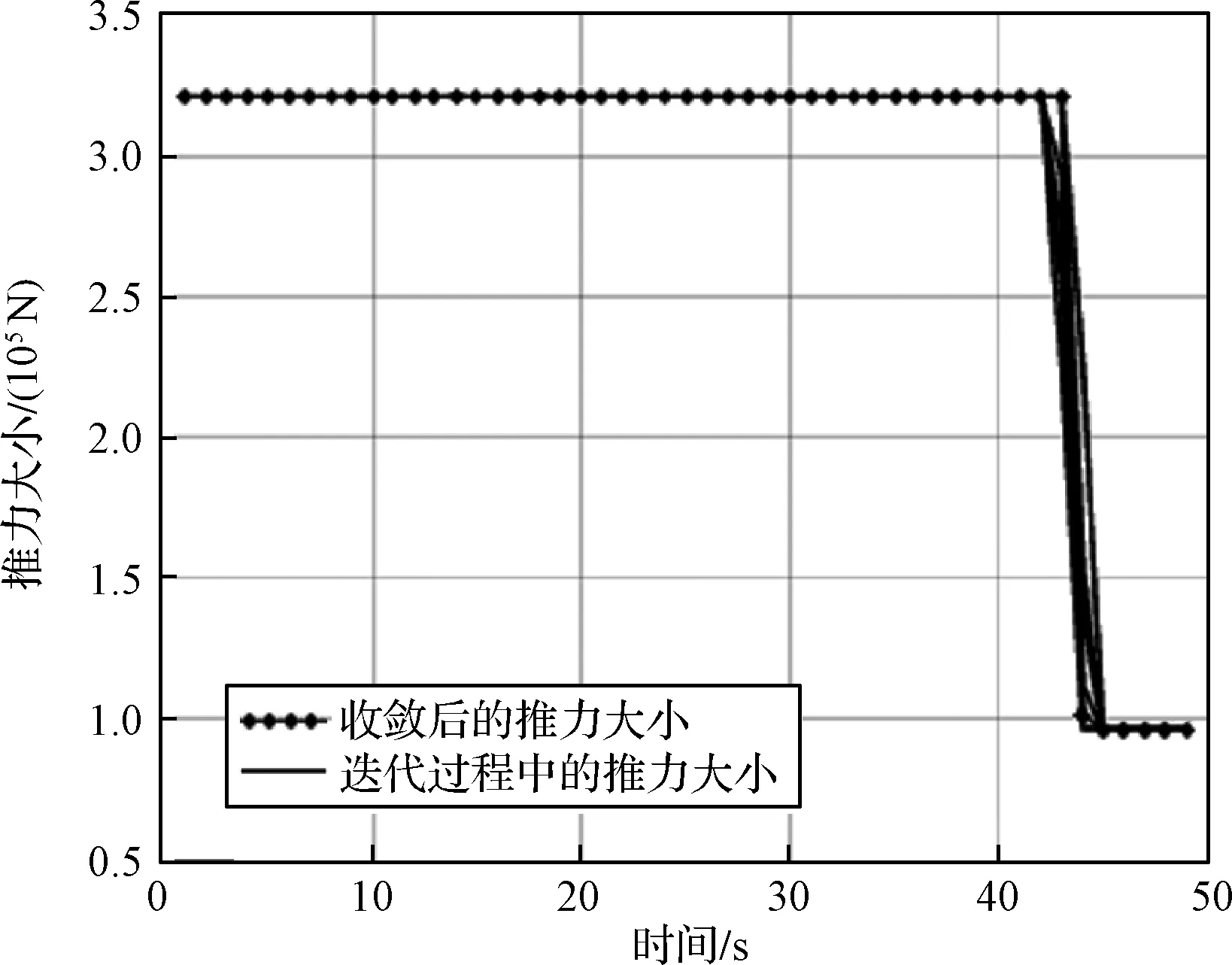
圖1 上升段推力大小變化曲線
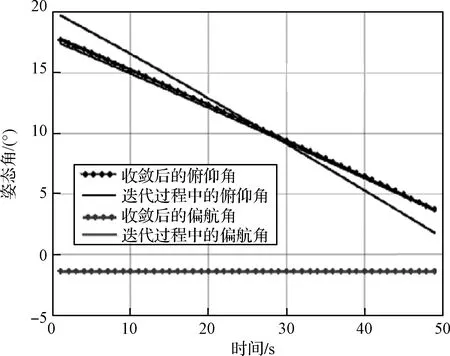
圖2 上升段姿態(tài)角變化曲線
經(jīng)過仿真校驗,基于該推力曲線,模型補償序列凸規(guī)劃方法得到的最優(yōu)軌跡能夠精確滿足表1中給定的火箭上升段終端狀態(tài)約束與控制量約束。
圖3中,標記“·”的曲線代表最后一次迭代得到的最優(yōu)解對應的氣動加速度變化曲線。從圖3可以看出,氣動加速度曲線呈現(xiàn)遞減的趨勢,這主要是隨著飛行高度的增高,大氣密度快速減小導致的。從氣動加速度的迭代過程圖可以看出,模型補償序列凸優(yōu)化方法通過對氣動力的不斷補償進行序列軌跡規(guī)劃,對氣動力補償?shù)氖諗恳馕吨撔蛄蟹椒ǖ氖諗俊?/p>
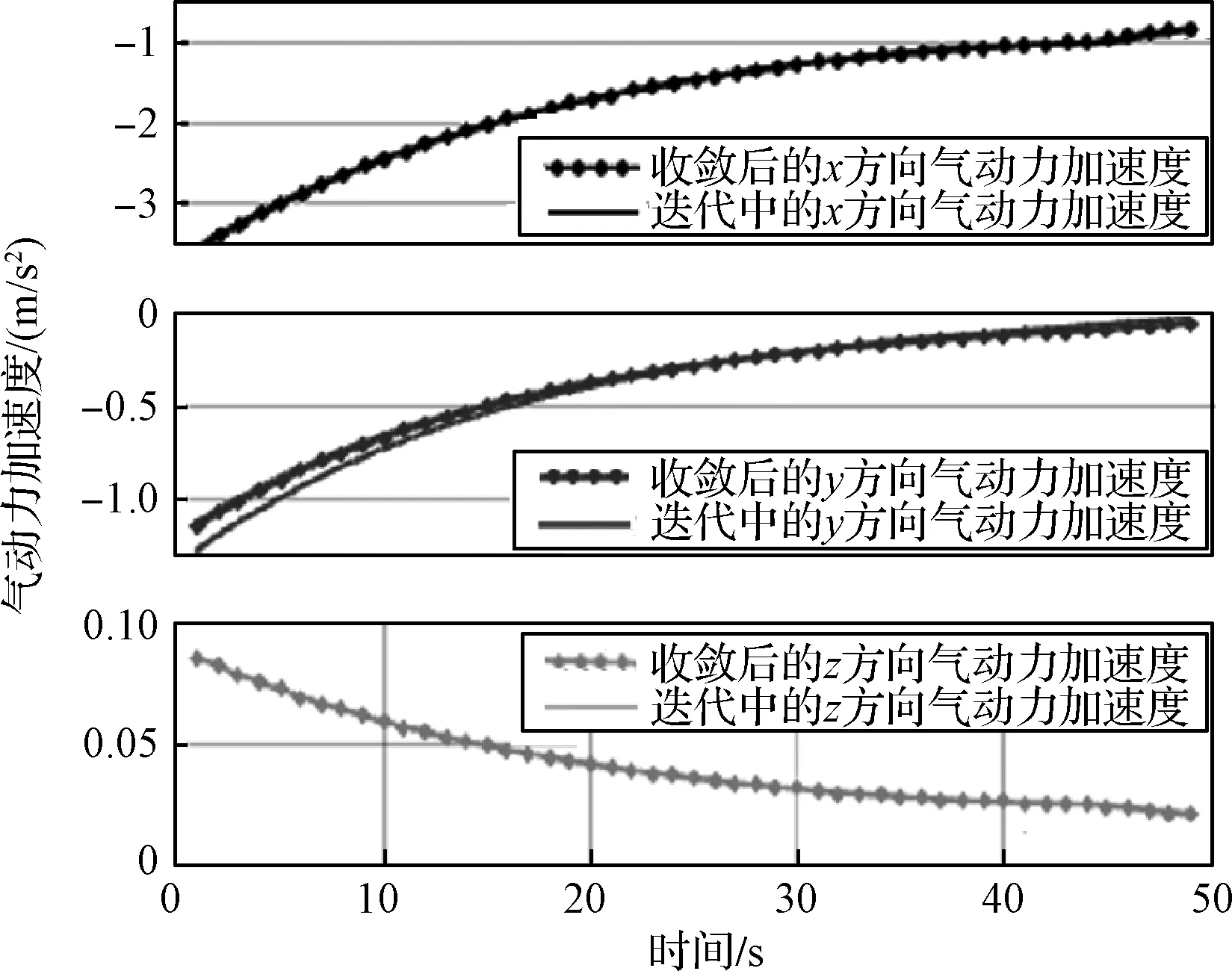
圖3 上升段氣動力加速度在發(fā)慣系三個方向分量的變化曲線
在軌跡規(guī)劃收斂時間方面,該任務仿真時通過7次迭代后收斂,共耗時1.5 s,平均每次迭代耗時0.21 s;本次數(shù)值仿真對應50個離散點(以1 s為等時間間距進行離散),當實際任務需要進一步減少軌跡生成時間時,可以在軌跡精度允許范圍內(nèi),增大離散點間隔,從而通過減少離散點個數(shù)的方式加快軌跡生成速度。
3.2 火箭垂直著陸段軌跡自主規(guī)劃仿真與分析
對于火箭垂直著陸任務,需要在火箭著陸時刻保持火箭速度為0,且箭體豎直向上。另外,通常要求火箭在著陸階段燃料消耗最省,以節(jié)省火箭的發(fā)射成本、提高火箭的有效載荷重量。
仿真采用的火箭模型以及基本任務參數(shù)設置如表2所示。
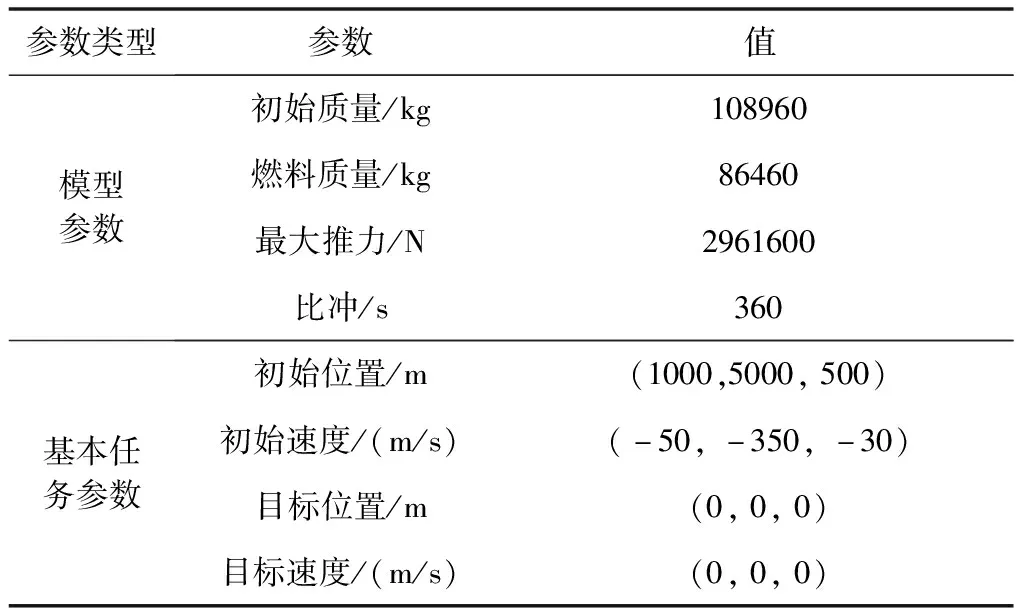
表2 著陸段火箭模型與基本任務參數(shù)設置
圖4和圖5中,標記“·”的曲線代表最后一次迭代得到的最優(yōu)飛行軌跡和最優(yōu)速度在發(fā)慣系三個方向上的分量,沒有標記“·”的曲線則代表迭代過程中得到的飛行軌跡和速度曲線。
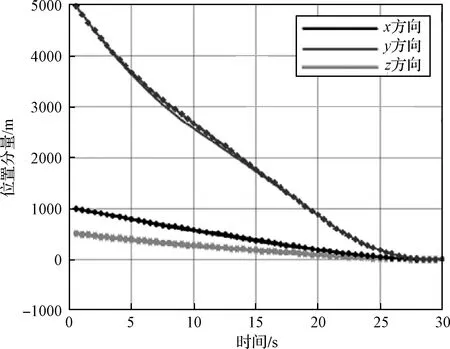
圖4 垂直著陸段位置在發(fā)慣系三個方向分量的變化曲線
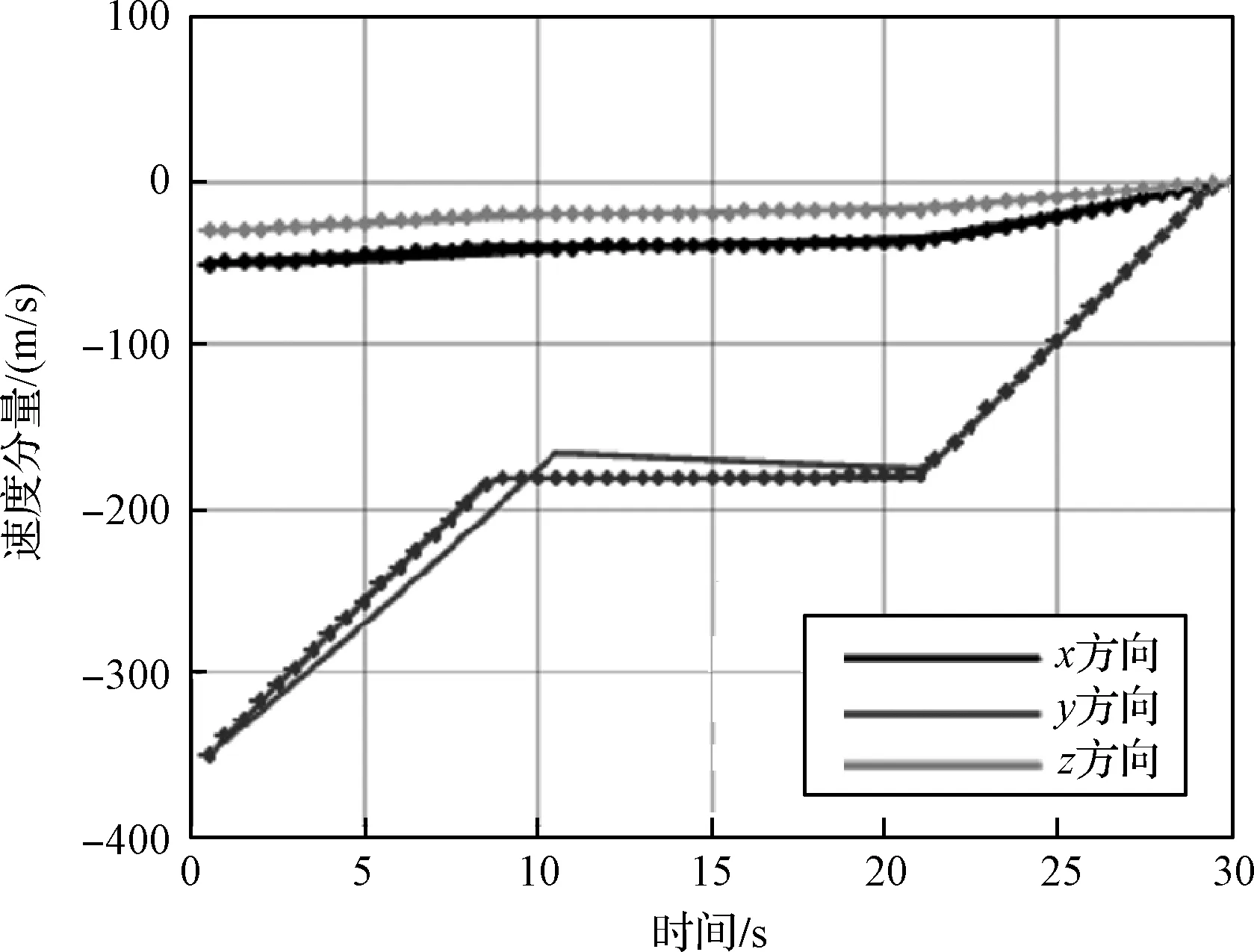
圖5 垂直著陸段速度在發(fā)慣系三個方向分量的變化曲線
每幅圖有多條曲線,代表序列迭代過程中每次迭代產(chǎn)生的最優(yōu)解曲線。雖然每次迭代產(chǎn)生的解均能滿足著陸約束,但中間迭代采用的氣動模型還處于不斷補償修正中,并不能代表真實的模型,只有最后一次模型補償收斂后得到的解,才能算是具有真實意義的最優(yōu)解。
圖6和圖7中,標記“·”的曲線分別代表最后一次迭代得到的最優(yōu)推力大小曲線和最優(yōu)俯仰角、偏航角指令曲線。仿真結(jié)果表明,基于該推力大小和姿態(tài)角形成的推力矢量,模型補償序列凸規(guī)劃方法得到的最優(yōu)軌跡能夠精確滿足火箭垂直著陸所需要的終端狀態(tài)約束條件。
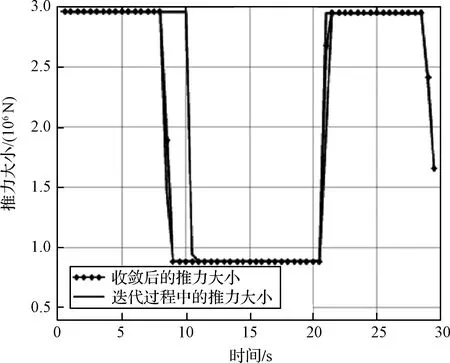
圖6 垂直著陸段推力大小變化曲線
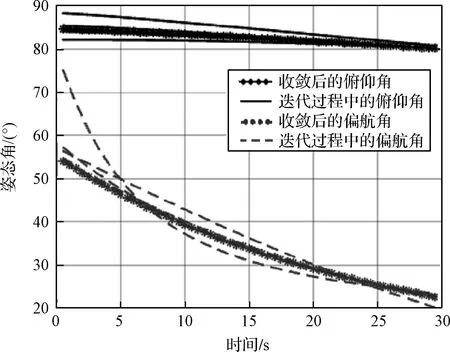
圖7 垂直著陸段姿態(tài)角變化曲線
圖8中,標記“·”的曲線代表最后一次迭代得到的最優(yōu)解對應的氣動加速度變化曲線。從圖8可以看出,火箭在著陸過程中,氣動加速度也會隨著速度的降低而減小,最后時刻減小為0。從氣動加速度的迭代過程圖可以看出,模型補償序列凸規(guī)劃方法對氣動加速度進行了序列的補償并最終收斂。

圖8 垂直著陸氣動力加速度在發(fā)慣系三個方向分量迭代更新圖
最后,在軌跡規(guī)劃收斂時間方面,該任務仿真時通過8次迭代后收斂,共耗時2 s,平均每次迭代耗時0.25 s;每次迭代所需時間與離散點個數(shù)、約束數(shù)量相關,本次數(shù)值仿真對應60個離散點(以0.5 s為等時間間距進行離散),當實際任務需要進一步減少軌跡生成時間時,可以在軌跡精度允許范圍內(nèi),通過增大離散點間隔,減少離散點個數(shù)的方式進行處理。
綜合以上仿真結(jié)果可知,本文提出的模型補償序列凸規(guī)劃方法可以通過序列補償?shù)姆绞教幚泶髿鈱觾?nèi)非線性氣動力對軌跡規(guī)劃帶來的不利影響。在利用該方法對軌跡規(guī)劃問題序列求解時,火箭的氣動力通過不斷的補償最終收斂到準確的氣動模型,同時也完成了方法的收斂迭代過程,這一快速收斂性將有利于滿足火箭軌跡自主規(guī)劃任務對軌跡優(yōu)化實時性的需求。
4 結(jié) 論
針對大氣層內(nèi)的火箭軌跡自主規(guī)劃問題,本文研究了一種模型補償序列凸規(guī)劃方法。該方法對火箭軌跡規(guī)劃問題的非線性項(軸向力加速度、法向力加速度和重力加速度)和過程約束進行了序列補償方案設計,結(jié)合無損凸化和變量替換技術,將火箭軌跡規(guī)劃問題轉(zhuǎn)化為一個序列凸規(guī)劃問題。通過在序列凸規(guī)劃問題中增加柯西約束,保證得到的序列最優(yōu)解為一組柯西序列,從而進一步保證了該方法對應求解算法的收斂性。從理論分析可知,模型補償序列凸規(guī)劃方法不需要初始猜想軌跡,具有設計簡單,自主性強的特點。最后,分別通過對大氣層內(nèi)上升段與垂直著陸段的軌跡自主規(guī)劃任務的仿真,對本文提出的模型補償序列凸規(guī)劃方法進行了校驗,得到結(jié)論如下:
1)該方法能夠較好地處理大氣層內(nèi)氣動力影響下的火箭軌跡規(guī)劃問題。
2)該方法具有較好的收斂性,能夠滿足火箭軌跡自主規(guī)劃任務對軌跡規(guī)劃問題求解的收斂性要求與實時性要求。
3)該方法對火箭的著陸段與大氣層內(nèi)上升段的軌跡規(guī)劃任務都有較好的適應性,對在線軌跡規(guī)劃在工程上的應用提供了理論基礎。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數(shù)理化·七年級數(shù)學人教版(2020年10期)2020-11-26 08:24:50
公民與法治(2020年11期)2020-07-25 02:02:06
數(shù)學物理學報(2020年2期)2020-06-02 11:29:24
領導決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
中國衛(wèi)生(2016年2期)2016-11-12 13:22:16
華東科技(2016年10期)2016-11-11 06:17:41
光學精密工程(2016年6期)2016-11-07 09:07:19
中國工程咨詢(2016年4期)2016-02-14 07:28:28
