智能服務機器人的設計應用
2021-03-15 19:05:50谷良田梁禮賢程仁煌黎坤華林孔鵬
錦繡·下旬刊 2021年9期
谷良田 梁禮賢 程仁煌 黎坤華 林孔鵬

摘要:國家提出的科技強國戰略以來,我國科技研發事業得到了前所未有的發展,能力得到了全方位提升和突破。針對人們的收入水平、消費水平的不斷提高,同時工作壓力也不斷增大,人們極想從繁瑣的勞動家務中解放出來這一問題,我們對智能服務型機器人進行了設計與應用研究,使其能夠采用機械手將垃圾拾取到自帶垃圾桶和吸塵器自動吸塵的方式,從而完成家庭垃圾清理的功能。
關鍵詞:智能家居;清潔機器人;設計;應用
1.引言
隨著科技水平的不斷提高,機器人已不再只用于工業化生產,而是逐漸出現在家庭生活中,人們對智能家用機器人也不再陌生;同時,現代生活節奏不斷加快,人們不僅要忙于繁重的工作與應酬,還要處理各種各樣的家務,因此我們團隊研發了一款低成本,功能齊全的智能清潔機器人,以此更好地追求高品質的生活。文章就智能服務機器人的設計應用做出相應的概述,具有一定的參考價值。
2.智能服務機器人的結構設計
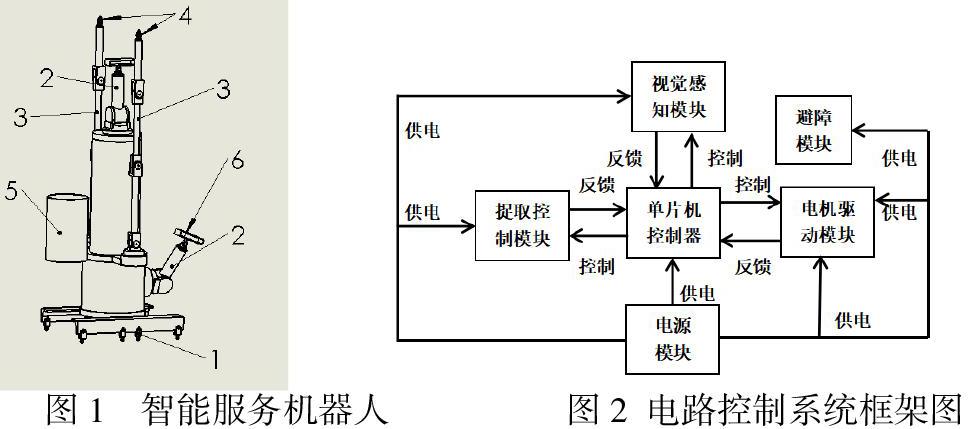
智能服務機器人由1--底座移動輪組、2--可伸縮吸塵器、3--機械手、5--垃圾桶、6--吸塵收集器等基本構件組成。結構簡單,組裝方便,易拆卸,易清洗,日常不需要太多維護, 大大降低了日常維護頻率。
1)底座移動輪組。底座移動輪組由8個小移動輪組成,左右各自4個為一組,分別由兩個直流電機驅動。在實際使用中,可實現機器人的全方位旋轉、自主移動。
2)可伸縮吸塵器。可伸縮吸塵器由可伸縮小液壓缸和吸塵套嘴、底部的直流電機組成,可實現預定的吸塵工作。
3)機械手。機械手為可伸縮式的直管和四指手爪組成。兩處關節連接并且可旋轉。每處關節分別由舵機驅動,大方面地保障了垃圾的拾取工作。
4)垃圾桶和吸塵收集器。垃圾桶和吸塵收集器由空心桶組成,并嵌套在機器人中部,可替換與摘除,對垃圾收集起到保障作用。
機器人通過傳感器檢測到所需要清潔的環境系數自動識別灰塵程度和垃圾,將傳感器檢測到的數據進行處理自動生成控制程序,驅動機器人八個驅動輪移動到有灰塵或者有垃圾的區域,吸塵器 1 和吸塵器 2 結構原理相同,所處位置不同,有兩處都可旋轉到任意角度,軸為可伸縮式的直管。地面上的灰塵使用吸塵器 2 進行吸塵工作,墻壁有灰塵則使用吸塵器 1 進行吸塵工作, 地面上的垃圾通過機械手的四爪結構拾取垃圾放進垃圾桶,底座移動輪由 8 個驅動輪和基座組成 垃圾桶可自由裝卸。智能服務機器人可以邊吸塵邊拾取垃圾,也可獨立工作,是一種方便高效家用服務型清潔機器人,如圖1所示。
3. 智能服務機器人控制系統硬件設計
機器人控制系統硬件主要由單片機控制器、視覺感知模塊、捉取控制模塊、電源模塊和電機驅動模塊組成系統框圖如圖2所示。
1)視覺感知模塊。采用OV7670攝像頭模塊進行圖像采集,通過opencv算法實現物體大小及形狀的檢測。反饋圖像到STM32控制器模塊,通過算法分析控制捉取模塊實現物塊的捉取。
2)控制捉取模塊。為了更加靈活方便,單個機械臂共采用4個舵機,使用STM32單片機產生的PWM信號進行控制。單片機通過硬件進行計數,受外界干擾少,工作可靠。通過控制4個舵機實現4個自由度機械手的捉取控制。相對于傳統模擬舵機,反應變得更快,加速和減速時也更迅速更柔和,使得數字舵機提供更高的精度和更好的固定力。
3)電機驅動模塊。考慮到機器人行走裝置、立體結構、各傳感器模塊、機器人整體重量、工作電壓以及控制方式等因素。采用N20直流減速電機作為機器人的驅動電機,工作電壓5V,額定轉速66r/min,額定轉矩為1Kg每厘米,以滿足機器人整體的設計要求。
由于采用八輪驅動,采用四個DRV8833雙驅動模塊,可用來驅動電機。該模塊相對于傳統的TB6612FNG效率上提高很多,體積小,工作電壓低,在額定范圍內芯片基本不發熱。可簡單方便地實現直流減速電機地控制,簡化了電路的結構。
3.1?物體識別和定位算法
單目視覺識別是指只使用一個攝像頭完成物體識別的技術,采用opencv算法配合ov7670攝像頭模塊對物體進行大小與結構識別,在精度要求相對較低、場景簡單開闊的平臺,單目視覺識別在識物體識別和定位算法領域具有廣泛的應用場景。識別物體一次只需要2至4毫秒,實時性強。
4.智能服務機器人功能
該智能服務機器人能夠憑借一定的人工智能,自動在家庭、賓館、寫字樓等室內環境完成清潔工作,一般采用機械手將垃圾拾到自帶垃圾桶和吸塵器吸塵的方式,從而完成地面清理的功能,也可以在公園、廣場、遠動場等室外環境進行垃圾撿拾工作。機身為自動化技術的可移動裝置,配有集塵盒的真空吸塵裝置和垃圾桶,配合機身設定控制路徑,在室內反復行走,如:沿邊清掃、集中清掃、隨機清掃、直線清掃等路徑打掃,并輔以邊拾取垃圾。這樣可以加強打掃效果,以完成擬人化清潔效果。
4.1?自動吸塵
該智能服務機器人使用結構相同的兩個可伸縮吸塵器和吸塵收集器組成吸塵系統。吸塵器1和吸塵器2結構如圖3、圖4所示,所處位置分別為一左一右,分別由直流電機驅動。當機器人檢測到灰塵時,系統做出相應反應,攝像頭和傳感器發出指令,機器人移動到相對應的位置,可伸縮吸塵器開始工作。吸塵器可根據所在灰塵的位置不同,伸縮與旋轉,以達到預訂的吸塵結果。
4.2?自動拾取對應垃圾
該機器人可以實現對應垃圾的拾取功能,以彌補吸塵裝置對大物體垃圾不可吸取的缺點。抓取系統分別由三節機械手軸和四指手爪組成,分別由360度和180度的舵機驅動,以實現抓取的功能。機械手軸為可伸縮式的直管,交接處關節連接并且可旋轉,當系統識別物體時,傳達相對應的指令,機械手可繞著Z軸進行360°旋轉和X軸180°旋轉,以實現精準抓取的功能。這樣,該機器人不僅可以吸收地上的灰塵,還可以清潔大顆粒的垃圾,實現大范圍的清潔,實現更智能化的清潔,四爪結構如圖5所示。
4.3?自動識別路徑
該智能服務機器人使用充電電池運作,操作方式以遙控器、或是機器上的操作面板進行;可以設定時間預約清理,自行充電,自帶充電系統。機器人前方設有傳感器與攝像頭,可偵測障礙物,如碰到墻壁或其他障礙物,會有選擇地自行轉彎,同時也可自動識別垃圾和灰塵程度,將傳感器檢測到的數據進行處理自動生成控制程序,從而有規劃地清掃。除了清理功能,該機器人還具備放置芳香劑、驅蚊劑和光觸媒殺菌等功能。
5.結語
本文從實際出發,解決了當下家庭清潔方面勞動繁雜,人工成本過高等問題。對智能家居服務型機器人進行了優化設計,使其更加便捷,易于操作。本設計讓機器人具有自動吸塵,自動撿拾垃圾,放置芳香劑等功能,大大提高了生活工作效率。不論是哪一功能,我們從實際出發,設計符合常規標準,對智能清潔服務機器人進行最佳設計,使其發揮出最大功能。
參考文獻
[1]徐勝華.基于STM32 的智能掃地機器人研究與設計[D],廣西師范大學,2016
[2]陳泳.智能掃地機器人電源系統設計[J],軟件導刊,2016 15(2):93-95.
[3]陳偉安,李明賢,徐東鎮,等.一種智能拖地機器人設計與研究[J],機械,2019(6):66-70.
[4]簡毅,高斌,張月.一種室內掃地機器人全遍歷路徑規劃方法研究[J],傳感器與微系統,2018(1):32-34.
[5]李麗蘭,葉雙清.清潔機器人路徑規劃專利技術綜述[J].科技經濟導刊,2019,27(23):21.
基金項目:北部灣大學大學生創新創業訓練計劃資助項目(202011607121);
(北部灣大學?廣西?欽州?535011)
猜你喜歡
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
考試周刊(2016年76期)2016-10-09 08:45:44
科技視界(2016年20期)2016-09-29 14:22:00
科技視界(2016年20期)2016-09-29 12:03:12
科技視界(2016年20期)2016-09-29 11:47:01
科技視界(2016年20期)2016-09-29 11:02:20
