基于RTK技術的無人機應用于鐵塔三維建模中的精度分析
2021-03-16 02:47:24張濤劉瑞葛亮高國慶許志勇
中國管理信息化 2021年4期
張濤 劉瑞 葛亮 高國慶 許志勇
[摘 要]文章主要采用大疆精靈Phantom 4 RTK技術進行桿塔數據采集,影像坐標采用自帶的RTK定位模塊。在此基礎上,對電力鐵塔進行三維建模。為了提高三維建模的精度,對無人機影像進行三維重建。結果表明,RTK的定位模式能滿足鐵塔建模的要求,結合無人機影像三維重建技術,可提高精度。
[關鍵詞]RTK技術;無人機;鐵塔;三維建模
doi:10.3969/j.issn.1673 - 0194.2021.04.043
[中圖分類號]TM75[文獻標識碼]A[文章編號]1673-0194(2021)04-00-03
0 ? ? 引 言
在過去,電力部門對鐵塔數據的收集主要依靠人力,采用經緯儀、測高桿等專業儀器對鐵塔數據進行收集。這種方式不僅對人力要求較高,而且檢測結果不準確,檢測效率較低,已經難以滿足現代電網運營和管理工作的精細化和高效化要求[1-2]。無人機具有視野廣闊、飛行高度可靈活變化等特點,可以不受設備設施高度的限制,能充分發揮近距離拍攝和數據圖像處理的優勢,因此,無人機測量成為電力部門常用的一種測量方式。特別是基于RTK技術的無人機,可實現實時動態測量,并且可同時搭載紅外熱像儀、可見光數碼相機等設備,利用這些設備能有效搜集獲取輸電走廊的紅外影像資料、可見光等,能顯著提高測量的精度[3-5]。大疆精靈Phantom 4 RTK是一款目前市面上常見的小型多旋翼高精度航測無人機,主要用于對低空進行測量,具有非常高的成像系統和導航定位系統,而且體積較小,攜帶方便,航測效率高。而將基于RTK技術的無人機應用于鐵塔三維建模中,具有更高的測量精度,可為鐵塔三維建模提供更為精準的技術保障。
1 ? ? 基于RTK技術的無人機應用于鐵塔三維建模的流程
1.1 ? 無人機數據采集
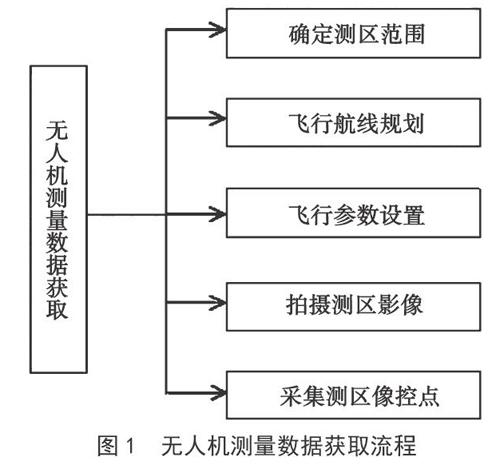
采用大疆精靈Phantom 4 RTK智能無人機進行數據采集。該無人機搭載2 000萬有效像素的攝像設備,可實現1.5 cm左右的垂直定位和1 cm左右的水平定位。通過無人機中內置的圖像補償器,對相機的中心點進行自動校對。在采集數據時,需要確定測定區域的位置,對測定區域內無人機的飛行航線進行合理規劃。若測定區域環境比較差,首先應該將區域劃分成多個測定區域,對于每個區域,根據面積和長度的大小,合理規劃飛機的飛行架次和飛行時間[6-7]。對于數據采集的方式,一般采用1個垂直、4個傾斜的方式來進行,飛行高度約為離地面50 m,旁向的測量范圍重疊面積為60%,具體采集流程如圖1所示。
1.2 ? RTK數據處理
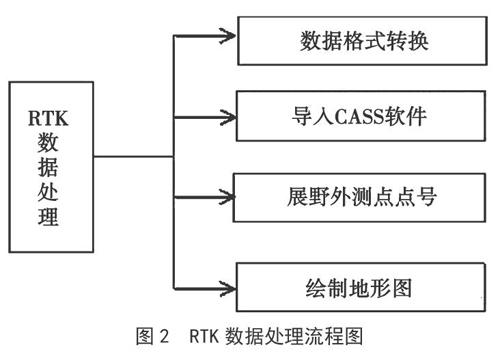
在進行RTK數據處理時,主要使用專業的數據處理軟件,如果CASS9.1等。通過這些軟件,根據RTK采集到的數據進行地形圖繪制。野外測量中可能會使用全站儀等設備進行輔助測量,因此,在繪制地形圖的過程中,需要將不同儀器設備測量到的數據進行格式轉化,都轉化成CASS9.1軟件可以導入的格式[8-9]。對于RTK數據的處理,具體流程如圖2所示。
1.3 ? 無人機數據處理
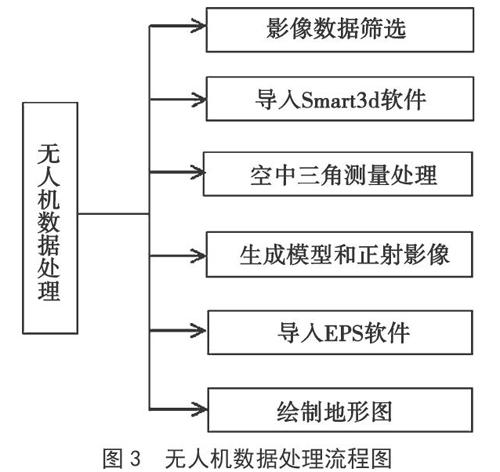
無人機數據處理使用的是Smart3D 4.4.9和EPS2016三維測圖軟件。其中,Smart3D軟件主要是將無人機影像數據進行正投影像和三維模型建設;EPS2016三維測圖軟件主要是根據Smart3D軟件獲得的正射影像和三維實景模型進行三維測圖。
對于無人機數據的處理,首先應該篩選無人機影像所采集到的數據,對于明顯不符合實際的數據、模糊的影像圖片等進行剔除[10]。采用大疆Phantom 4 RTK采集的POS數據可以自動寫入影像中。其次,在Smart3D軟件中設置好參數,根據測量區域的范圍進行自動攝影和三維實景建模。再次,通過EPS2016軟件進行地形圖繪制。該方法受地形和環境的影響較小,效果較高[11-12]。無人機數據處理流程如3所示。
2 ? ? 無人機影像三維重建精度分析
2.1 ? 利用三視圖約束的全局式重建
所謂全局式重建,是指在得到兩兩影像相對位姿及大量連接點后,利用一定約束條件一次性求解所有影像在全局統一坐標系的位姿,然后只需進行一次光束法平差進行優化。該方式較依賴迭代優化架構的增量式方法,重建效率高。全局式重建處理流程如圖4所示。
利用三視圖約束的全局式重建對三維模型構建的精度主要體現在搜索三視圖的匹配情況,匹配率對三維精度構建具有最為直接的影響。
2.2 ? RTK輔助重建
RTK輔助的三維重建,是指將無人機所搭載的RTK收集到的信息作為影像位置概略初值的三維重建方法。圖5為RTK輔助重建流程圖。
利用RTK輔助的三維模型重建,RTK數據精度對三維建模的精度影響較為明顯。
2.3 ? 精度影響及分析
由于基于RTK技術的三維建模不需要進行復雜的影像位置估計運算,在得到影像匹配結果后,該方法只需估計影像全局一致旋轉參數,并將其轉換至標準坐標系下,就可以實時獲取影像位姿初值,重建效率高。但是,重建精度依賴于RTK精度,需要搭載單點定位高精度RTK的無人機。而大疆精靈Phantom 4 RTK無人機可有效解決此問題。
全局一致旋轉參數可以利用最小二乘方法求解。然后,需要將全局一致轉換至RTK坐標系下,以實現影像位置和姿態坐標系的統一。該轉換可以通過相機在全局坐標系下的相對平移和RTK坐標系下平移之間的對準來實現。
對于像對(i, j),假設影像i和j由本質矩陣分解得到的相對平移方向向量為tij,影像j的全局一致性旋轉矩陣為Rj,則在全局坐標系下,相對平移方向向量為Tij=Rjtij,而在RTK坐標下,兩相機中心近似相對平移為:
RTKij=RTKj-RTKi(1)
其中,RTKi和RTKj為RTK記錄的影像i和j對應位置,二者之間的關系可通過式(2)來描述:
(2)
其中,,為RTK坐標系下相機平移方向向量;Rtrans即為要求的兩坐標系轉換矩陣。
求解Rtrans的問題是一個正交Procrustes問題,可以利用奇異值分解法(Singular Value Decomposition,SVD)解決。得到Rtrans后,對全局進行旋轉變換,就得到了與RTK坐標一致的影像姿態參數。然后,利用并查集的多視匹配點提取算法提取多視匹配點,由影像位姿參數進行三角化運算(攝影測量中前方交會),得到點的三維坐標。可以李瑩 等[13]提出的方法,選取攝像基線最長的兩個視圖來進行三角化,并根據重投影誤差對三維點進行篩選,保留重投影誤差小于一定閾值的點,與影像位置、姿態參數一起進行光束法平差優化。
基于三視圖約束的全局方法在一次性估計出影像全局一致位姿參數后,只需要進行一次光束法平差,因而,重建效率較增量法有了明顯提高。但是,為了保證重建的穩健性,該方法運用了三視幾何約束條件,由于無人機影像重疊度較大,三度重疊甚至多度重疊的情況極為普遍,這樣就帶來了大量的三焦張量計算、三視匹配點重建等相關計算[14]。而RTK輔助的重建方法直接利用RTK數據作為位置參數初始值,避免了影像全局一致位置參數的計算,大大簡化了求解問題,同時全局一致旋轉參數解算效率較高,計算用時少,有效提高了三維建模的精度。
3 ? ? 結 語
基于RTK技術的無人機在鐵塔三維建模中的精度要求較高,可以通過全局式重建方法利用三視幾何約束剔除粗差,也可以結合RTK輔助重建技術,保證圖像重建的穩健性。在以后的研究中,利用基于RTK技術的無人機進行鐵塔三維建模時,還要加強對鐵塔附近的樹木、建筑物對構建三維實景模型的影像和空地影像聯合建模的影響的研究。
主要參考文獻
[1]王偉斌,王城鋼.東北電網500 kV輸電線路帶電作業現狀[J].東北電力技術,2006(11):78-80.
[2]張鳳梅,葉非.無人機影像驗片輔助系統設計與實現[J].城市勘測,2012(5):72-74.
[3]徐云鵬,毛強,李庭堅.輸電線路機巡與人巡效果對比及協同巡檢建議[J].南方電網技術,2016(2):44-47.
[4]申靜.基于輸電線路智能化高壓輸電線路無人機巡檢裝置研究與實現[J].國網技術學院學報,2018(5):121-124.
[5]胡毅,王力農,劉凱,等.750 kV同塔雙回輸電線路帶電作業技術研究[J].高電壓技術,2009(2):373-378.
[6]張海軍,張國亮,趙雪松,等.500 kV緊湊型輸電線路耐張塔帶電作業工具的研制[J].電網技術,2005(24):82-84.
[7]于德明,沈建,汪駿,等.直升機與人工巡視效果對比分析[J].中國電力,2008(11):25-28.
[8]蔡妃友,郭章儉.無人機在航標巡檢中的應用和展望[J].珠江水運,2018(21):121-122.
[9]李亞男,道勇,王駿,等.無人機低空攝影測量技術在電力線路工程中的應用[J].電力勘測設計,2016(5):34-37.
[10]鄭小兵,鄭彥春,張紅軍,等.無人機攝影測量技術用于電力勘測工程的探索和設想[J].電力勘測設計,2009(6):22-24,32.
[11]袁慧潔.基于無人機遙感和面向對象法的簡單地物分類研究[J].測繪與空間地理信息,2020(3):113-117,123.
[12]王猛,隋學艷,梁守真,等.利用無人機遙感技術提取農作物地物覆蓋度方法研究[J].作物雜志,2020(3):177-183.
[13]李瑩,于海洋,王燕,等.基于無人機重建點云與影像的城市地物分類[J].國土資源遙感,2019(1):149-155.
[14]李冬雪,高志強,尚偉濤,等.基于無人機多光譜影像的海濱景區滸苔信息提取研究[J].海洋環境科學,2020(3):438-446.
猜你喜歡
中國高新技術企業(2016年35期)2017-02-10 17:06:33
環球人文地理·評論版(2016年5期)2017-01-03 02:35:45
人間(2016年26期)2016-11-03 17:52:40
中國科技博覽(2016年22期)2016-11-01 18:10:31
科教導刊·電子版(2016年20期)2016-10-20 17:44:43
科技視界(2016年22期)2016-10-18 14:30:27
科技視界(2016年6期)2016-07-12 11:31:55
企業導報(2016年9期)2016-05-26 20:58:26
中國科技博覽(2016年12期)2016-05-09 04:07:55
中國科技博覽(2016年14期)2016-04-25 02:22:19
