無人駕駛線路長大區間行車組織研究
2021-03-22 00:56:37王賀梁靖涵
河南科技 2021年26期
王賀 梁靖涵

摘 要:隨著城市軌道交通的快速發展,全自動運行技術越來越多地應用于各大城市地鐵線路,國內無人駕駛線路運營里程也呈上漲趨勢。地鐵長大區間具有站間距大、列車在區間的運行時間長、發生故障時運調度整難度大、施工組織中對線路出清確認要求高及各項作業交叉多等特點。同時,無人值守全自動駕駛(Unattended Train Operation,UTO)運作模式下的無人駕駛線路,相比傳統線路,在行車組織方面面臨著新的風險和挑戰。因此對無人駕駛線路長大區間的行車組織做專題研究,并制定相應的應對策略,對確保運營安全、穩定、有序地為乘客服務具有重要意義。
關鍵詞:無人駕駛線路;長大區間;行車組織
中圖分類號:U292 文獻標識碼:A 文章編號:1003-5168(2021)26-0109-03
Research on Traffic Organization of Long Section on Metro Driverless Line
WANG He LIANG Jinghan
(1.Operation Branch, Zhengzhou Metro Co., Ltd., Zhengzhou Henan 450000;2.Zhengzhou University of Science and Technology,Xingyang Henan 450100)
Abstract: With the rapid development of urban rail transit, automatic operation technology is more and more applied to subway lines in major cities, and the operating mileage of domestic driverless lines is also on the rise. The long section of metro line has the characteristics of large station spacing, long operation time of trains in the section, great difficulty in operation adjustment in case of failure, high requirements for line clearance confirmation in construction organization and many intersections of various operations; at the same time, driverless lines have no drivers on board in UTO(Unattended Train Operation) operation mode. Compared with traditional lines, driverless lines face new risks and challenges in traffic organization. Therefore, it is of great significance to make a special study on the driving organization of long sections of driverless lines and formulate corresponding countermeasures to ensure the safe, stable and orderly service for passengers.
Keywords: metro driverless line;long section;traffic organization
隨著全自動運行技術的發展,國內無人駕駛線路的建設也在加快,地鐵線路長大區間的行車組織具有獨特性。本文對無人駕駛線路長大區間的行車組織進行詳細探討。
1 地鐵長大區間特性分析
1.1 長大區間的分類
根據長大區間所處地鐵線路的空間位置可分為高架長大區間、隧道長大區間和跨高架隧道混合長大區間。
1.2 長大區間的特點
1.2.1 區間距離較長。普通地鐵區間長度一般為1~2 km,長大區間一般均超過3 km。河南鄭州機場至河南許昌市域鐵路工程(以下簡稱機許線)明港南站至華夏幸福城站區間長8.65 km。
1.2.2 列車運行速度快。傳統線路列車運行速度一般為80 km/h,機許線設計速度目標值為120 km/h。
1.2.3 區間運行時間較長。相比其他普通區間,列車在長大區間運行時間長,同一區間內會同時存在兩輛或多輛列車。發生故障時,行車調整、人員組織、設備搶修難度,另外也會給人員疏散和救援帶來了一定困難。
1.2.4 埋深大。隧道深挖且區間隧道空間相對封閉,可用疏散設施有限,人員疏散難度較大。
1.2.5 多高架長大區間。處于城市郊區的線路常有高架區間,與外界自然環境直接連通,線路上方無遮擋,易出現人員、異物侵限,且受天氣條件影響較大。
2 UTO線路長大區間難點及設計分析
2.1 UTO線路長大區間的行車組織難點
基于地鐵線路長大區間的類型和特點,在全自動運行系統功能設計框架下,無人值守全自動駕駛(Unattended Train Operation,UTO)線路長大區間的行車組織面臨新的風險,尤其對于兩列車甚至多列車在同一區間內運行的過程中,遇到影響行車的故障時,長大區間內的行車組織如何安全有效地開展,如何快速組織應急人員上車等問題是關鍵點。
本文主要從惡劣天氣、車輛故障、信號故障3個方面探討UTO線路長大區間的行車組織問題。
2.2 UTO線路長大區間設計分析
2.2.1 北京大興機場線概況。北京大興機場線一期線路全長41.23 km,共有3座車站。其中地下線22.44 km,高架段16.16 km。本期運營長度39.90 km,平均站間距19 km,最高設計時速160 km。
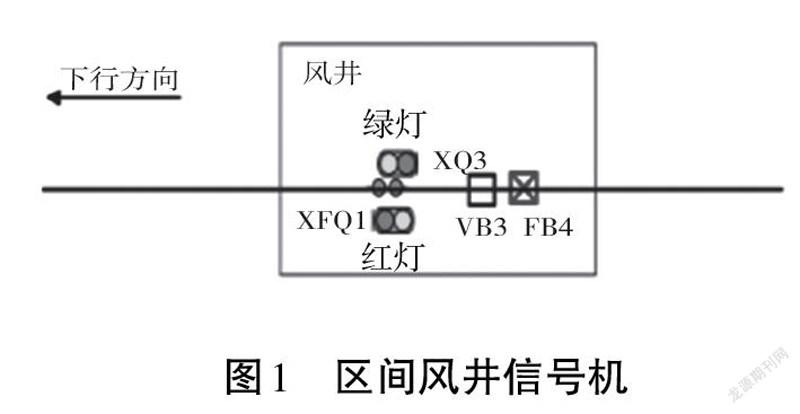
①設置區間風井防護信號機。為風井設置的防護信號機采用綠、紅二顯示機構,紅燈為定位顯示,其顯示及含義如圖1所示。綠色燈光表示準許列車按規定的速度越過該信號機;紅色燈光表示不準列車越過該信號機。②土建上設置區間疏散點,便于火災應急情況下區間疏散。
2.2.2 鄭州機許線概況。鄭州機場至許昌市域鐵路工程線路北端起于鄭州航空港區機場北站(含),南端止于許昌市許昌東站(含),線路全長64.91 km,共設車站26座,平均站間距2.60 km。其中,機許線(鄭州段)線路長約31.21 km,設站15座,均為地下站,最大站間距8.65 km,位于明港南站至華夏幸福城站(許昌段起點車站)區間(以下簡稱明華區間),為高架區間。
①按照機許線平均站間距計算,明華區間應設置4個車站,實際設2個站(遠期預留2個車站)。參照北京大興機場線的設計,可以在明華區間設置兩個區間出入點,作為人員進出及臨時停車點使用。②同樣在明華區間設置區間防護信號機,配合區間出入點設置。③在適當的位置為應急人員配備必要的交通工具,方便人員盡快到達長大區間臨時進出點。④明華區間設有兩條平行的單渡線,如果啟用可以用于運營調整。
3 UTO線路長大區間行車組織研究
在UTO運營模式下,正常情況下的行車組織可以考慮在長大區間兩端的車站上下行各設置若干名司機,值守該區間運行的列車,到站下車。具體的值守方案可由乘務專業制定。主要分析在惡劣天氣、區間列車故障、區間信號故障等非正常情況下對長大區間列車運行的影響及行車組織方法。
3.1 高架段惡劣天氣下的行車組織
為了保證惡劣天氣下列車在高架區段能夠正常運行,無人駕駛線路增加了雨雪模式。機許線的明華區間屬于高架段,在運營期間遇到惡劣天氣時,雨雪模式可用于輔助行車調整,如發生軌道黏著下降、信號無法保證等現象,則通知值守司機人工駕駛。針對雨雪等惡劣天氣,不同瞭望距離的行車組織措施建議如表1所示。
3.2 區間車輛故障下的行車組織
根據無人駕駛線路特點,車輛故障分為可恢復動車故障和須司機現場處理故障。
3.2.1 可恢復動車故障。通常情況下,無人駕駛線路長大區間發生車輛故障時,系統具備自愈功能。如系統自動處理后恢復,可組織列車運行至前方站,安排人員上車值守;如故障未自動恢復,通過調度遠程復位操作恢復故障,列車進站后安排人員上車值守;如故障仍未恢復,則需要司機介入處置。
若出現兩列車在同一區間運行時發生故障,則視情況進行不同的處置措施。兩列車在同一長大區間運行時,若后車車輛故障但系統自愈或調度遠程操作恢復動車,則對前車運行無影響;若前車發生故障但系統自愈或調度遠程操作恢復動車,則后車可跟蹤前車運行,調度需密切監控列車運行,必要時在區間臨時停車點扣停后車。
如故障導致列車降速影響運營,則提前安排司機上車,組織備車替換故障列車。
3.2.2 需司機現場處理故障。長大區間車輛故障,無法通過系統自愈或遠程操作恢復動車時,需要組織司機介入處理。若長大區間安排有司機值守,調度直接通知司機介入故障處理;若長大區間不安排司機值守,調度需組織司機上車進行故障處理。
首先,調度需立即扣停后續列車,若同一區間故障列車后方有列車,應組織其在安全距離外停車。若車上有司機,司機按照規定處理,如不能恢復則合旁路或打緊急牽引動車。若車上無司機值守,調度可根據后方列車距前方故障列車的距離選擇立即遠程施加緊急制動,或者組織列車在臨時停車點的信號機前停車。調度組織值守點司機登車處理,如故障不能恢復則合旁路或打緊急牽引動車。
此外,調度要按照救援需求提前作出安排,組織后續列車清客并安排司機上車,做好救援準備。
當有兩列車在同一區間運行,且前行列車發生無法恢復的故障決定救援時,若進入長大區間的列車有司機值守,調度扣停后行列車并組織司機換端運行至后方站清客,擔任救援列車;若車上沒有司機值守,行調需立即組織司機從地面值守點前往區間登車,根據行調指令執行列車救援。司機登車后將后行列車換端駕駛至后方車站清客擔任救援列車,或者司機駕駛后行列車載客執行救援任務。
當處理長大區間車輛故障或組織區間列車救援時,調度要對故障區域外的行車做好調整,為故障點的救援爭取時間;組織備用車上線投入服務,或組織正線列車小交路運行。
3.3 信號故障下的行車組織
在應對信號或通信故障方面,全自動運行系統增加了蠕動模式(Creep Automatic Model,CAM)和遠程限制人工駕駛(Restricted Manual Driving,RM)兩種駕駛模式。
①蠕動模式。在全自動駕駛模式(Fully-automatic train Operating Mode,FAM)下,當車輛網絡檢測到制動系統通信故障,車載主機控制器(Computer Controller,CC)監督到牽引或制動反饋異常或車輛與車載CC通信故障時,列車向中心申請進入蠕動模式。調度授權后,故障列車限速運行至最近站臺,等待人工處理。
②遠程RM模式。遠程RM模式是指車地通信正常的情況下,列車定位丟失,通過中心遠程授權列車以限制模式運行,經過兩個信標后再次獲得定位。當列車定位丟失導致列車在區間緊制,調度在確定列車前方區段空閑、道岔位置正確且鎖閉、信號開放后,授權列車緩解緊制在遠程RM模式下以一定的限速運行,列車重新獲得定位。
3.3.1 區間信號故障下的行車組織。區間信號故障可分為車載信號故障和軌旁信號故障。全自動運行系統的信號系統穩定性、可靠性及冗余度都非常高,但不可避免地會出現信號類的故障導致列車迫停區間。因此,當發生區間信號故障導致無法動車時,只能采取人員上車處理的方式,將區間故障列車人工駕駛至車站。
①前車車載列車自動防護系統(Automatic Train Protection,ATP)故障。當長大區間內有兩列車運行且前車發生車載ATP故障導致列車緊制時,在調度工作站上出現彈出式報警,若后車在安全距離外,車載ATP使后車在安全距離處制動停車,且系統聯動車站扣車;若后車在安全距離內,則緊急制動,須停車后才能緩解,系統自動聯動車載廣播。若車上有司機值守,調度通知司機處理,如故障不能恢復則組織列車降級進站;若車上沒有司機值守,則調度組織應急人員登車處理。
②后車車載ATP故障。當長大區間內有兩列車運行且后車發生車載ATP故障導致列車緊制時,系統具備相關聯動,調度工作站故障報警,后方站扣車。若前車距離后車有較遠距離,則前車不受影響,可正常運行至前方站;若前車尚未出清后車占用的計軸區段,則前車會立即緊急制動。若車上有司機值守,調度通知司機處理,如故障不能恢復則組織列車降級進站;若車上沒有司機值守,則調度組織應急人員登車處理。
3.3.2 連鎖故障。當連鎖單機設備故障時,自動切換至備機工作;當連鎖雙機故障時,該連鎖管轄區域的列車將緊制,調度及車站工作站均無法監視故障連鎖區內列車。調度組織正常區域內的行車,并通知專業人員進行故障處理;通知司機登車人工駕駛;通知車站鉤鎖故障連鎖區內的道岔。
全自動運行系統有連鎖故障場景下的相關聯動,如故障不能恢復,則采取電話閉塞法組織行車。無人駕駛線路出現連鎖故障采用電話閉塞法組織行車時,涉及長大區間有以下注意事項:①需考慮長大區間內可能存在兩列及以上列車的情況;②核對完列車位置后,組織應急人員上車;③長大區間內有兩列及以上列車迫停區間的情況,按照電話閉塞法組織列車運行到車站會出現“車多站少”的問題,可采取前后列車逐列授權動車的方式,將前車組織到站后清客進入區間待令,再組織后車進站待令;將前車組織清客進入區間后按照區間迫停列車的處理規定,組織前車向前方運行,須確認該閉塞區間空閑;④必須保證所有區間迫停列車都已進入站臺,方可組織啟動電話閉塞。
4 結語
無人駕駛線路長大區間在非正常情況下的行車組織具有較大的特殊性。結合無人駕駛線路特征,主要對高架段惡劣天氣、區間車輛故障、區間信號故障這3種情況下長大區間內的行車組織進行探討。在保證安全的前提下組織故障列車進站或直接退出服務,最大程度地降低對運營的影響,可以為無人駕駛地鐵線路提供參考。
參考文獻:
[1]孫濤,郭頌,宋吉鵬.地鐵高架長大區間非正常情況下行車組織探究[J].都市快軌交通,2018(2):66-70.
[2]金慶,包乃賀.地鐵長大區間隧道安全疏散研究[J].鐵路技術創新,2019(6):86-90.
[3]田峰,王海橋,朱祝龍,等.長大地鐵區間隧道火災可用安全疏散時間算法研究及應用[J].隧道建設,2019(1):54-59.
[4]印禎民,李春廣,曾要爭.弓網檢測系統在全自動無人駕駛地鐵中的應用[J].城市軌道交通研究,2018(6):131-135.
[5]北京地鐵大興機場線實現無人駕駛[J].都市快軌交通,2021(4):118.
1580501186299
