基于LTP時域分析方法的MMC并網(wǎng)系統(tǒng)穩(wěn)定性分析
2021-03-24 06:29:18梅勇王一帆謝惠藩朱建行林磊
南方電網(wǎng)技術(shù) 2021年2期
梅勇,王一帆,謝惠藩,朱建行,林磊
(1. 中國南方電網(wǎng)電力調(diào)度控制中心,廣州510623;2. 強電磁工程與新技術(shù)國家重點實驗室(華中科技大學電氣與電子工程學院),武漢430074)
0 引言
模塊化多電平換流器(modular multilevel converter,MMC)作為一種大容量柔性直流換流器裝備,以其模塊化程度高,輸出電壓諧波含量小的優(yōu)勢[1 - 3],在許多已投入運行或正在規(guī)劃的輸電工程中得到廣泛的應用[4],例如新能源并網(wǎng)(張北四端直流輸電工程[5]),區(qū)域電網(wǎng)異步互聯(lián)(魯西背靠背直流工程)和遠距離電能傳輸(烏東德特高壓三端混合直流工程)等。
MMC的調(diào)制信號與子模塊電容、橋臂電感等相互作用使MMC呈現(xiàn)多頻率耦合特性,致使MMC并網(wǎng)系統(tǒng)中存在寬頻帶不穩(wěn)定的風險[6 - 7]。上海南匯工程[8]和廣東南澳工程[9]發(fā)生風電場與MMC之間的次同步振蕩現(xiàn)象。德國北海Borwin1工程在運行中發(fā)生290 Hz左右振蕩[10]。此外還有風電并網(wǎng)接入MMC系統(tǒng)引起的800 Hz的振蕩問題[11],魯西背靠背直流工程1.2 kHz振蕩事故[12],MMC與交流系統(tǒng)的1.7 kHz的振蕩問題[13]渝鄂聯(lián)網(wǎng)工程發(fā)生的1.8 kHz振蕩事故[14]。因此,考慮MMC多頻率耦合特性的建模方法及其穩(wěn)定性分析在工程上具有重要的意義。
簡化阻抗模型在建模過程中將控制器輸出作為MMC的內(nèi)電勢,同時忽略了MMC內(nèi)部動態(tài)的多頻次耦合特性[15 - 16],該方法適用范圍有限。動態(tài)相量[17 - 18]建模過程中考慮了MMC子模塊電容電壓的直流、基頻、二倍頻、三倍頻成分以及環(huán)流的直流、二倍頻成分,忽略了更高頻次成分,簡化了MMC的多頻率特性。這兩種方法都未說明建模過程中忽略的頻率成分對系統(tǒng)穩(wěn)定性的影響。
基于多諧波線性化的MMC阻抗建模[19 - 20],是一種直接在周期性時變運行軌跡上進行線性化的方法,在交流側(cè)注入頻率為fp的電流小擾動,根據(jù)MMC的頻率耦合特性得出交流側(cè)電壓表達式,進而得到多頻率展開的阻抗模型。線性周期時變(linear time-periodic, LTP)時域建模首先建立了MMC的時域狀態(tài)方程,并在多頻次成分保留完整的條件下做軌跡線性化[21 - 23]。實際上,基于多諧波線性化的阻抗建模本質(zhì)與LTP時域模型的頻域表達無本質(zhì)區(qū)別[24]。由于LTP時域建模不需要對每個狀態(tài)變量進行復雜的多頻率展開,故適用于分析MMC并網(wǎng)系統(tǒng)的穩(wěn)定性問題。
文獻[21]建立了MMC的LTP模型,并利用Floquet-Lyapunov理論[25]研究了系統(tǒng)的穩(wěn)定性,但是該方法沒有說明PI控制器的kp參數(shù)對系統(tǒng)穩(wěn)定性的影響。文獻[22]分析了MMC連接弱電網(wǎng)工況下鎖相環(huán)動態(tài)的影響,擴展了時域模型,提出了鎖相環(huán)參數(shù)設計方法。文獻[23]分析了不對稱工況下環(huán)流抑制和正負序基頻電流控制器(fundamental frequency current control, FFCC)對穩(wěn)定性的影響。然而,以上文獻均未考慮控制器長延時的影響,而實際工程中每個MMC都存在350~600 μs的延時,且目前國內(nèi)發(fā)生的高頻振蕩現(xiàn)象均與延時關系較大。控制器延時由信號采樣延時,控制策略實現(xiàn)耗時,驅(qū)動信號傳輸延時等構(gòu)成,在時空上(同一MMC不同工作時間、不同MMC)存在差異性,因此,研究延時對系統(tǒng)穩(wěn)定性的影響規(guī)律具有重要意義。本文采用LTP時域分析方法,建模過程中考慮FFCC、鎖相環(huán)動態(tài)和控制器延時,分析了兩種電網(wǎng)強弱、不同延時條件下,參數(shù)對系統(tǒng)穩(wěn)定性的影響。利用MATLAB/Simulink搭建了仿真模型,驗證了分析結(jié)論的正確性。
1 MMC并網(wǎng)系統(tǒng)數(shù)學模型
MMC并網(wǎng)系統(tǒng)狀態(tài)變量較多,本文分主電路、控制器及交流網(wǎng)絡3個模塊,明確每個模塊的狀態(tài)方程及輸入輸出關系,并構(gòu)成完整的閉環(huán)系統(tǒng)。
1.1 MMC主電路方程
MMC平均值模型拓撲結(jié)構(gòu)如圖1所示。三相MMC每相變量由下標j(j=a、b、c)表示,每一相由上、下兩個橋臂構(gòu)成,分別以下標k(k=p、n)區(qū)分。每個橋臂由N個子模塊、橋臂電感Lm和橋臂等效電阻Rm構(gòu)成,子模塊電容為C。MMC的平均值模型等效電容Cm=C/N,開關驅(qū)動信號平均化為調(diào)制輸出mkj。圖中,udc和idc為直流側(cè)電壓和電流,ukj和ikj分別表示橋臂電壓和電流,共6個量。ij和uj分別表示三相交流電流和電壓。
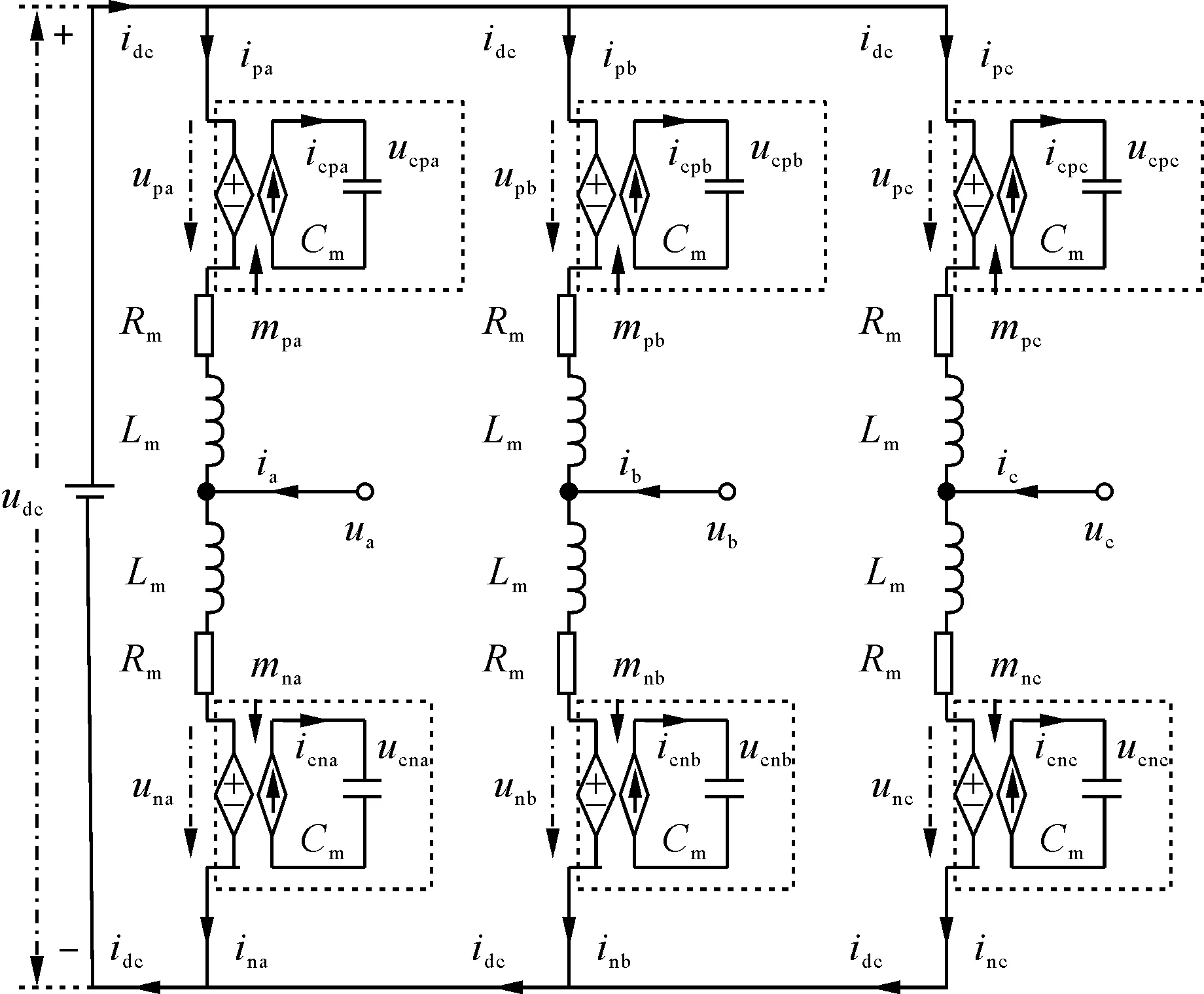
圖1 MMC平均值模型Fig.1 Average value model of MMC
(1)
(2)
(3)
(4)
式中udc=[udc;udc;udc]。
1.2 MMC控制器方程
MMC的控制器較多,分多時間尺度[26]。本文主要考慮電流時間尺度下MMC正常運行不可或缺的FFCC和鎖相環(huán)。其中,控制器延時分布在電壓和電流輸入端,且兩處延時基本相等[12],可將延時等效在FFCC輸出端,控制器結(jié)構(gòu)如圖2所示。其中kp1和ki1分別為FFCC的PI參數(shù)。
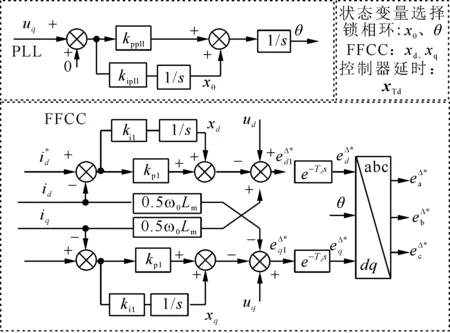
圖2 基頻電流控制器結(jié)構(gòu)Fig.2 Fundamental frequency current controller

(5)
(6)
式中下標含有“dq”的粗體變量分別表示d軸和q軸變量構(gòu)成的矩陣。J定義為:
J=[0 1; -1 0]
(7)

(8)
(9)
(10)

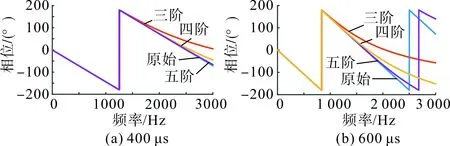
圖3 控制器延時bode圖Fig.3 Bode-diagram of time delay of controller
如圖2所示,鎖相環(huán)選擇狀態(tài)變量xθ和θ,kppll和kipll分別是鎖相環(huán)的PI參數(shù)。
(11)
1.3 交流側(cè)方程及系統(tǒng)狀態(tài)方程整合
交流側(cè)結(jié)構(gòu)與文獻[12]相同,如圖4所示,Cg,Lg,R1,R2分別是網(wǎng)絡側(cè)等效的電容、電感及其串聯(lián)電阻,Ugj為無窮大電網(wǎng)電壓。狀態(tài)變量選電容電壓ucj和電感電流iLj,狀態(tài)方程如(12)、(13)所示。輸出變量為uj,表達式如(14)所示。
(12)
(13)
uj=ugj-ucj-R2(ij-iLj)
(14)
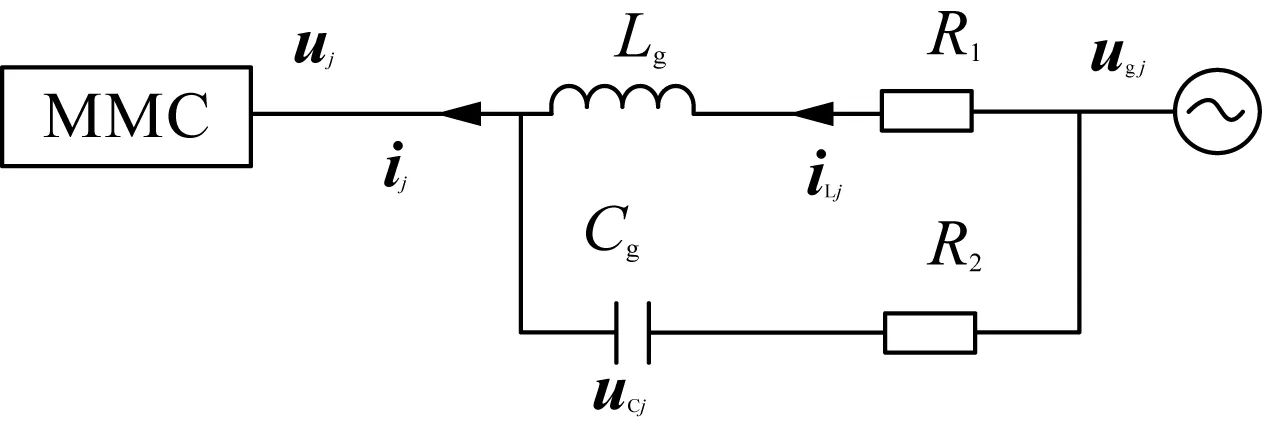
圖4 交流網(wǎng)絡側(cè)結(jié)構(gòu)Fig.4 Frame of AC network
將上述方程聯(lián)立后,梳理成圖5所示框圖,得到MMC并網(wǎng)系統(tǒng)的原始非線性狀態(tài)方程式(15)。式(16)—(17)為系統(tǒng)狀態(tài)變量和輸入量匯總。
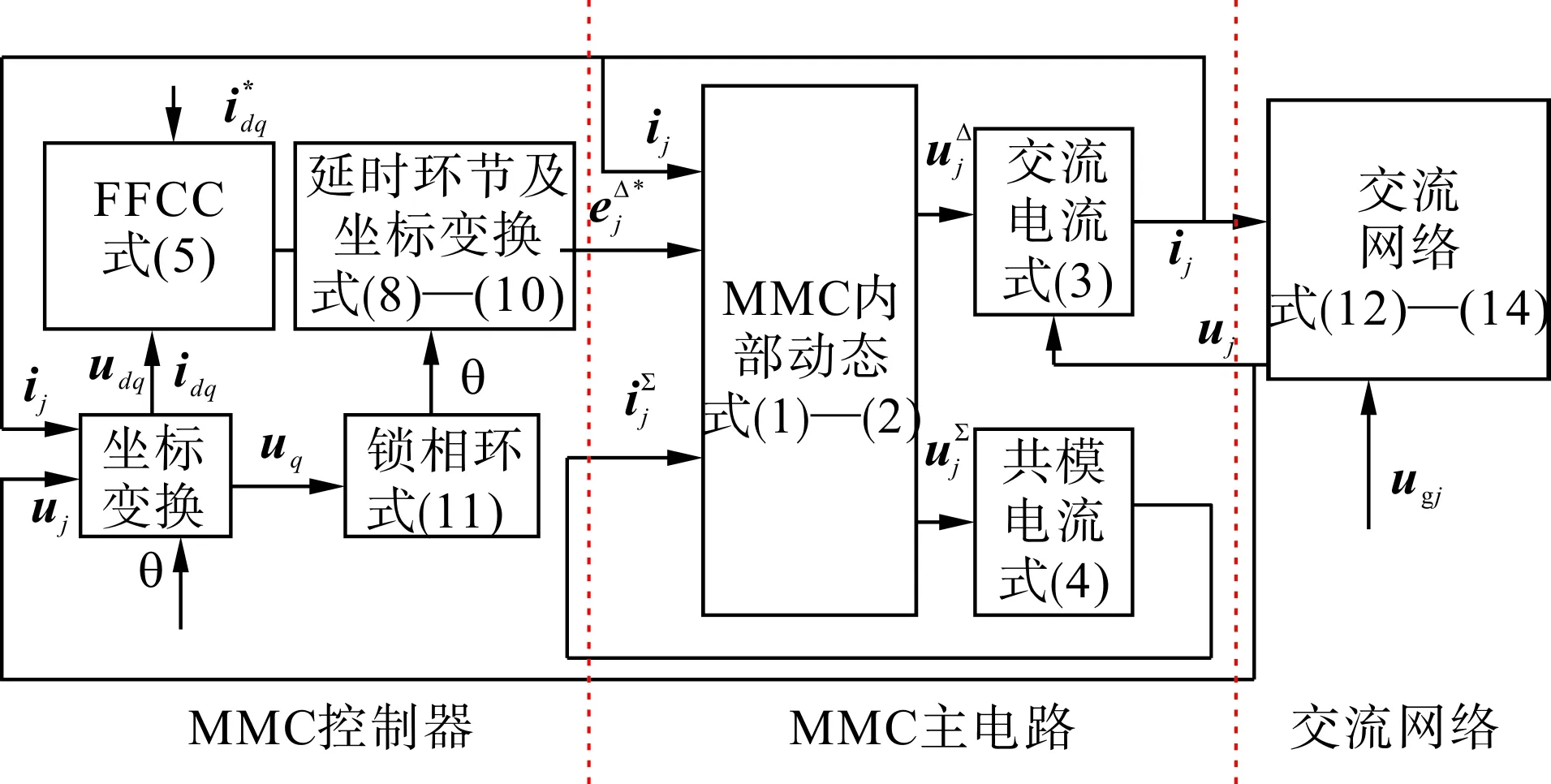
圖5 模型框圖Fig.5 Frame of model

(15)
(16)
(17)
2 系統(tǒng)的LTP時域模型
2.1 LTP模型建立
對狀態(tài)方程(15)在穩(wěn)態(tài)工作軌跡(x0,u0)處作小擾動線性化,建立MMC的LTP時域小信號模型為式(18)所示。將式(16)中狀態(tài)變量加前綴Δ以表示該變量的小信號,即表示LTP模型狀態(tài)變量。

(18)
對于MMC內(nèi)部動態(tài)特性(1)-(2),線性化結(jié)果如式(19)—(20)所示。
(19)
(20)
交流電流和共模電流方程(3)—(4),線性化后:
(21)
(22)
(23)
其中,中間變量與選取的狀態(tài)變量的關系式為:
(24)
(25)
Δidq=Tθ0Δij+ΔTθij0?Δudq=Tθ0Δuj+ΔTθuj0
(26)
Δuj=-Δucj-R2(Δij-ΔiLj)
(27)
狀態(tài)方程(5)、(9)、(11)線性化過程形如式(25),需將式(26)—(27)代入式中;式(8)、(12)—(13)方程是線性的,取其小擾動即可。至此,將所有線性的狀態(tài)方程整合,并消去中間變量后即可得到并網(wǎng)系統(tǒng)的矩陣A。建模過程類似于文獻[21 - 23],附錄C簡述了矩陣A的相關信息。
2.2 LTP時域分析方法簡述
文獻[25]介紹了LTP系統(tǒng)穩(wěn)定性判定方法,其核心思路是利用Floquet理論,通過矩陣變換將時變矩陣轉(zhuǎn)換為時不變矩陣,結(jié)合Lyapunov漸進穩(wěn)定性定理,得出穩(wěn)定性判據(jù)。該分析方法步驟如下。
1)計算MMC并網(wǎng)系統(tǒng)原始狀態(tài)方程。
2)在非線性模型在穩(wěn)態(tài)工作點(x0,u0)處進行小擾動線性化,建立LTP時域模型。
3)在MATLAB/Simulink中搭建系統(tǒng)仿真模型,并仿真獲得系統(tǒng)穩(wěn)態(tài)工作軌跡。其中,數(shù)值仿真步長和信號采樣步長為10 μs。
4)計算矩陣A所對應單值矩陣[25]E的特征值,若全部位于復平面單位圓內(nèi),則系統(tǒng)是穩(wěn)定的。若存在某特征值的模長大于1,則該系統(tǒng)不穩(wěn)定。
3 控制器參數(shù)變化的影響
本節(jié)主要分析MMC連接不同電網(wǎng)強弱下,不同控制器延時和FFCC的PI參數(shù)對系統(tǒng)穩(wěn)定性的影響。本文MMC參數(shù)如附錄B表1所示。電網(wǎng)強度由短路比(short circuit ratio,SCR)衡量[27],與直流額定功率PdcN、母線額定相電壓uN、交流系統(tǒng)等值阻抗Z有關。表達式為:
(28)
本文兩種電網(wǎng)條件等值阻抗和SCR如附錄B的表2所示。兩種工況分別對應強、弱電網(wǎng)。
下文所述某一參數(shù)變化時,其他參數(shù)均保持不變。
3.1 控制器延時
圖6分別描述了弱電網(wǎng)和強電網(wǎng)條件下控制器延時以步長5 μs逐漸增大時系統(tǒng)的根軌跡。其相同點是,當控制器延時較小時,特征值均在單位圓內(nèi),系統(tǒng)處于穩(wěn)定狀態(tài)。隨著控制器延時的逐漸增大,部分特征根向圓外移動,如圖中箭頭所示。說明無論電網(wǎng)強弱,控制器延時越大,系統(tǒng)不穩(wěn)定風險越大。所不同的是,MMC連接弱電網(wǎng)時,系統(tǒng)穩(wěn)定所對應的最大控制器延時約為500 μs,強電網(wǎng)對應約為520 μs。因此在該工況下弱電網(wǎng)容易出現(xiàn)不穩(wěn)定現(xiàn)象。
3.2 FFCC控制器參數(shù)
圖7描述了控制器延時在490 μs下,MMC連接弱電網(wǎng)的PI參數(shù)變化根軌跡。圖7(a)表示kp1從30逐漸增加50,部分特征值逐漸由單位圓外向圓內(nèi)移動,當參數(shù)大于36時,所有特征值均在單位圓內(nèi),系統(tǒng)處于穩(wěn)定狀態(tài)。隨后部分特征值向圓外移動,當參數(shù)大于45時,系統(tǒng)處于不穩(wěn)定狀態(tài)。圖(b)表示ki1的影響。參數(shù)從200逐漸增加至4 000。部分特征值逐漸向圓外移動,系統(tǒng)穩(wěn)定對應的臨界參數(shù)為小于2 400。
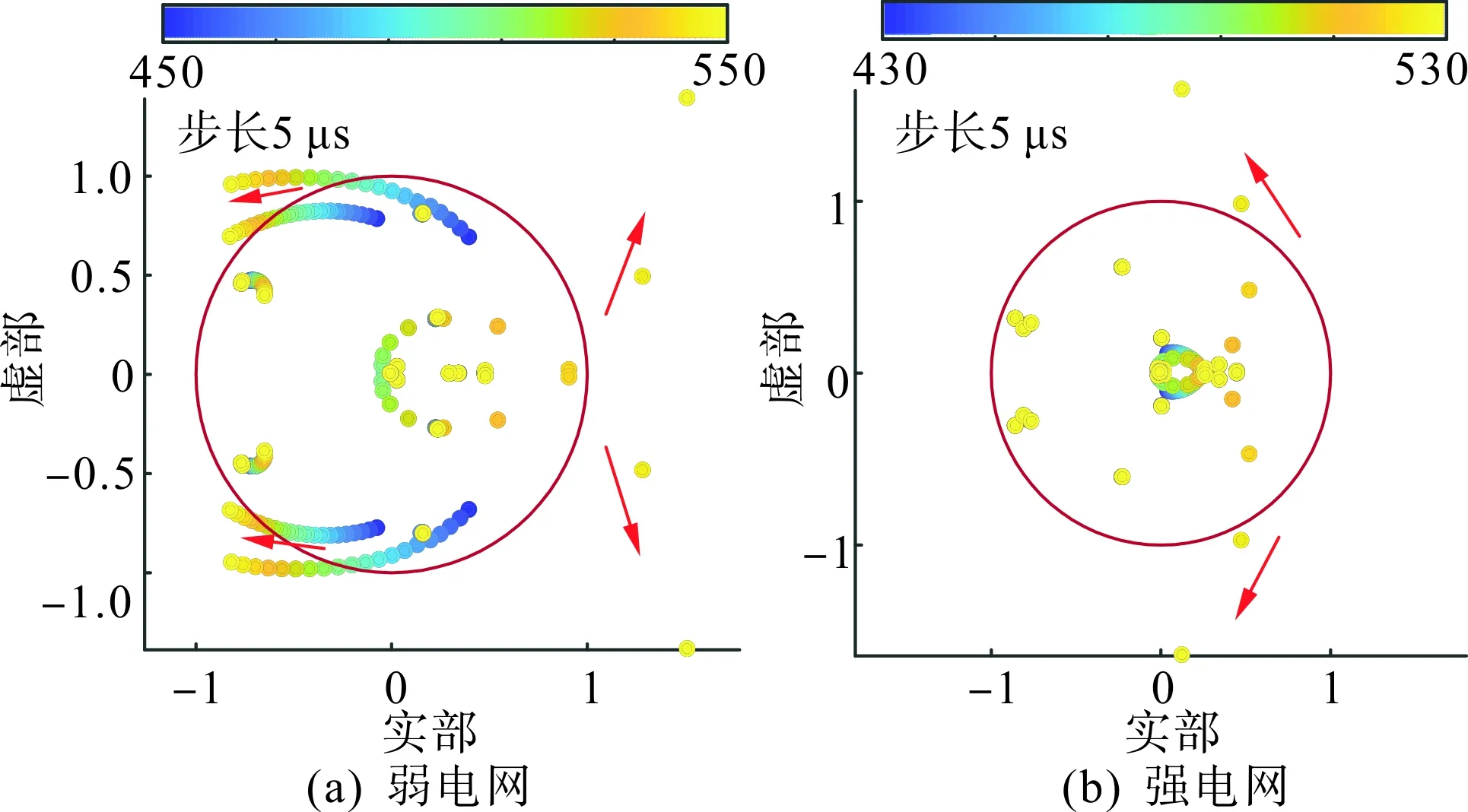
圖6 延時對系統(tǒng)穩(wěn)定性的影響Fig.6 The influence of time delay on system stability
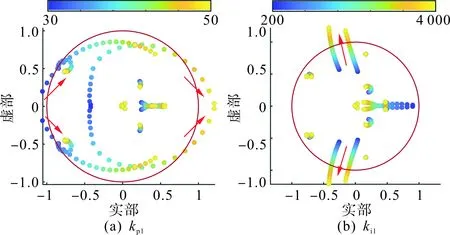
圖7 延時490 μs條件下kp1和ki1對系統(tǒng)穩(wěn)定性的影響Fig.7 Influences of kp1 and ki1 on system stability with time delay of 490 μs
圖7說明PI參數(shù)連接弱電網(wǎng)時,kp1參數(shù)過大或過小、ki1參數(shù)過大會導致系統(tǒng)不穩(wěn)定。圖8的4幅圖分別畫出控制器延時在470 μs、480 μs和490 μs條件下,兩種電網(wǎng)條件的PI參數(shù)變化對系統(tǒng)穩(wěn)定性影響趨勢線。圖8中橫坐標是PI參數(shù),縱坐標為特征值模長最大值,其中左圖均表示弱電網(wǎng),右圖表示強電網(wǎng)。
kp1參數(shù):在弱電網(wǎng)條件下,如圖8(a)左圖所示,參數(shù)大小以1為步長逐漸增加,可知延時越大,系統(tǒng)穩(wěn)定對應的參數(shù)范圍(后文簡稱“范圍”)越小,且延時對范圍的上下限都有影響;在強電網(wǎng)條件下,如圖8(a)右圖所示,分塊描述了范圍的上、下限,在kp1下限附近3條趨勢線基本重合,但在上限附近因延時的不同差異較大,3種延時下,其范圍分別為11~72,11~67,11~61。
ki1參數(shù):如圖8(b)所示,在弱電網(wǎng)條件下,控制器延時不會影響其下限,上限則隨著延時增大而減小。在強電網(wǎng)條件下時,參數(shù)較大范圍內(nèi)改變,系統(tǒng)仍然處于穩(wěn)定狀態(tài)。
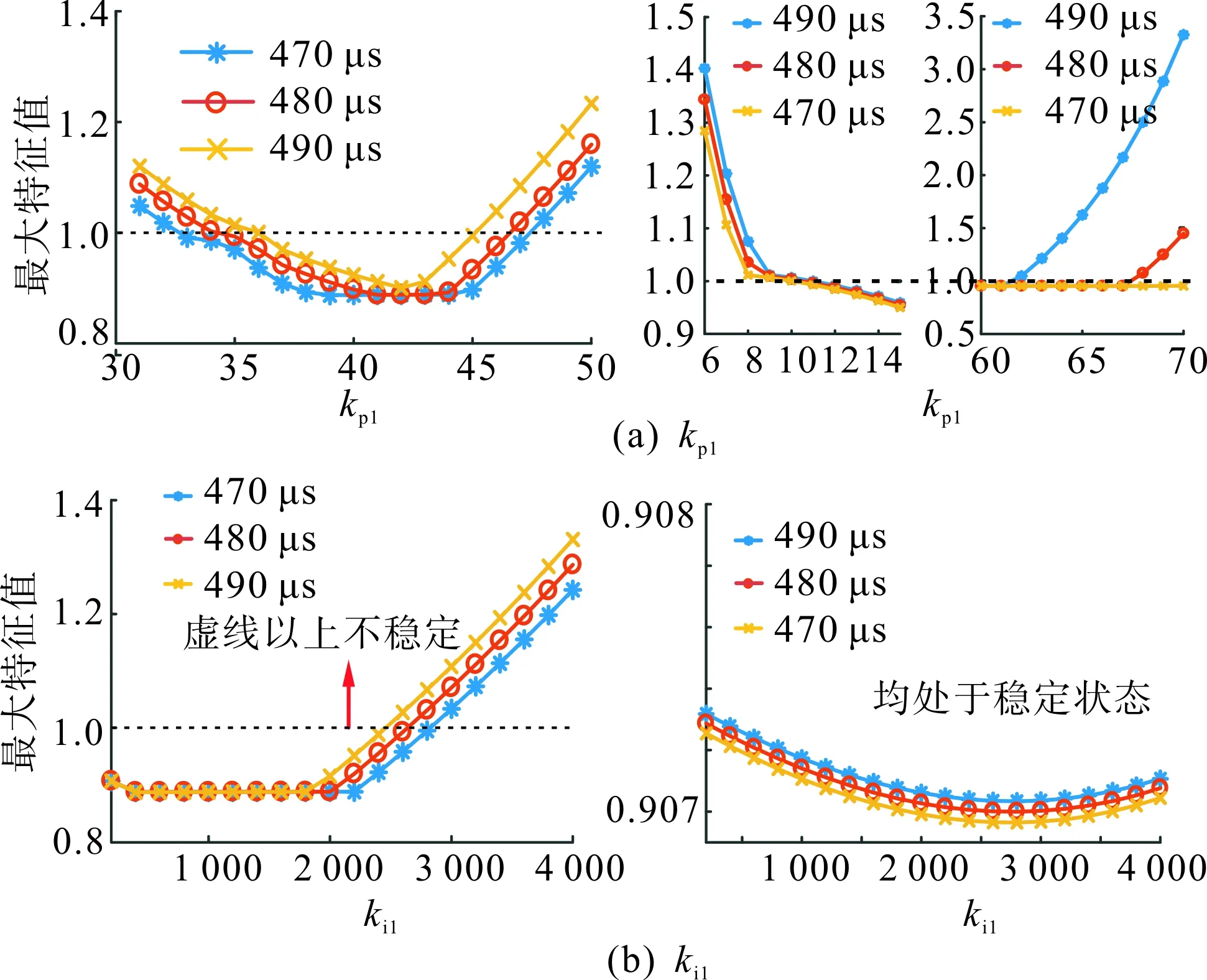
圖8 不同延時、弱(左)強(右)電網(wǎng)條件kp1和ki1對系統(tǒng)穩(wěn)定性的影響Fig.8 Influence of kp1 and ki1 on system stability with different time delay in weak (left) & strong (right) grid conditions
為了便于比較,將系統(tǒng)穩(wěn)定所對應的參數(shù)范圍列在表1中。其中“-”表示ki1在0~4 000內(nèi)變化,系統(tǒng)均處于穩(wěn)定狀態(tài)。從中可得出以下結(jié)論。1)無論電網(wǎng)強弱,參數(shù)范圍都隨著延時增大而減小。2)在弱電網(wǎng)條件下,延時影響kp1參數(shù)范圍的上下限,而強電網(wǎng)條件下控制器延時對下限的影響較小,對上限影響較大。3)在強電網(wǎng)條件下,ki1參數(shù)對系統(tǒng)穩(wěn)定性影響較小。弱電網(wǎng)下ki1參數(shù)范圍隨著延時增大而減小。
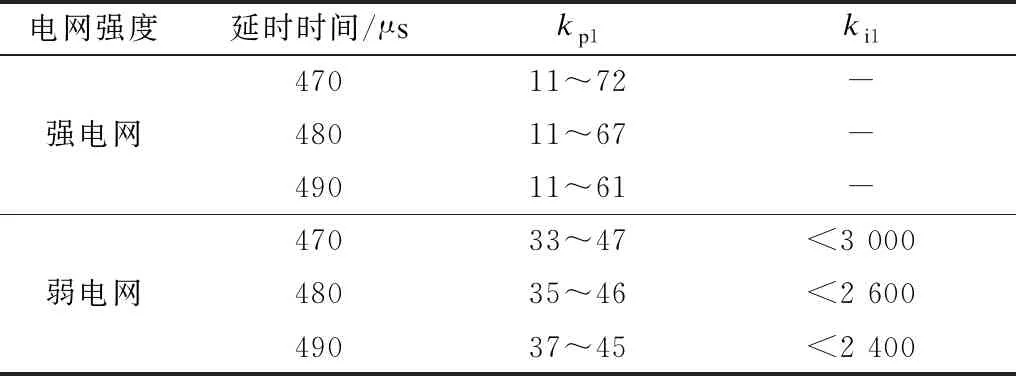
表1 控制器參數(shù)對系統(tǒng)穩(wěn)定性影響的總結(jié)Tab.1 Summary for the impact on system stability of the parameters of FFCC
4 仿真驗證
仿真波形如圖9—10所示。圖9描述了強弱電網(wǎng)下kp1參數(shù)的下限對比,圖10描述了上限的對比。(a)和(c)均為弱電網(wǎng)條件,(b)和(d)為強電網(wǎng)條件;(a)和(b)為480 μs延時,(c)和(d)為490 μs延時。
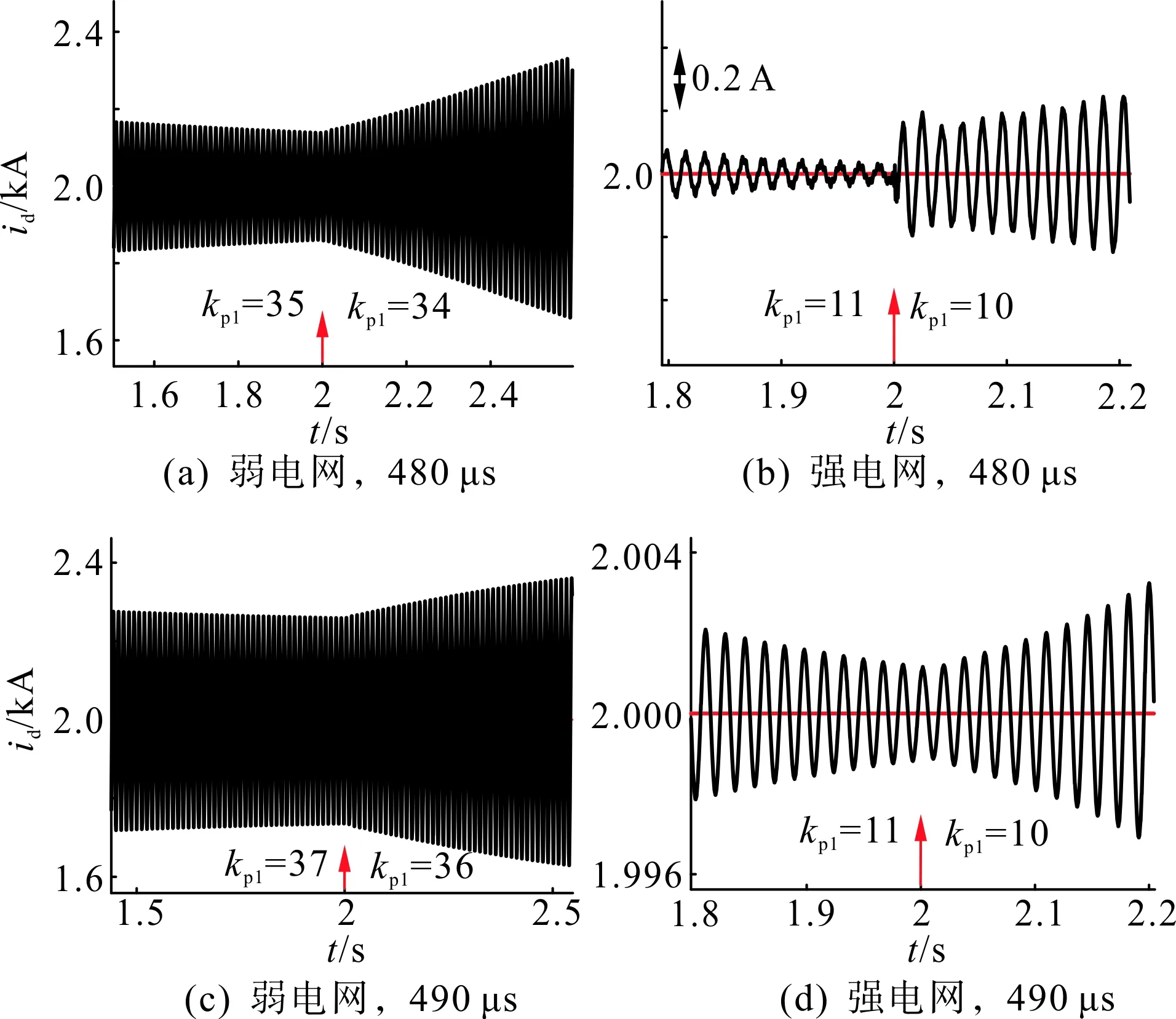
圖9 kp1參數(shù)下限的影響對比驗證Fig.9 Comparison of the lower limit of kp1

圖10 kp1參數(shù)上限的影響對比驗證Fig.10 Comparison of the upper limit of kp1
1)對比1:延時的影響規(guī)律

2)對比2:電網(wǎng)強弱對參數(shù)范圍的影響
假設控制器延時保持為480 μs不變,由圖9(b)可知,此時對于強電網(wǎng)而言,當kp1參數(shù)為11時,系統(tǒng)處于穩(wěn)定狀態(tài)。而在圖9(a)中可知弱電網(wǎng)條件下,kp1參數(shù)小于34時,系統(tǒng)已經(jīng)發(fā)散。故弱電網(wǎng)條件下參數(shù)范圍更小。
3)對比3:延時對參數(shù)范圍的影響
對于弱電網(wǎng)的參數(shù)下限,圖9(a)中kp1參數(shù)從35變化到34,系統(tǒng)發(fā)散。而當延時增大,下限變?yōu)?7。強電網(wǎng)條件下,圖9(b)和圖9(d)中,兩種延時條件下參數(shù)變化從11變化到10,系統(tǒng)均從不穩(wěn)定狀態(tài)變?yōu)榉€(wěn)定狀態(tài)。由此說明在本文工況下,控制器延時對弱電網(wǎng)條件的kp1參數(shù)下限影響較大,強電網(wǎng)下的影響較小。
對于參數(shù)上限,圖10(a)中kp1參數(shù)從46變化到47,系統(tǒng)發(fā)散。而當延時增大,該參數(shù)范圍的上限變?yōu)?5。強電網(wǎng)條件下,低延時下當參數(shù)變化從61變化到66,系統(tǒng)仍然處于穩(wěn)定狀態(tài),而延時增大時,參數(shù)從61變化到62后系統(tǒng)會處于不穩(wěn)定狀態(tài)。延時對kp1參數(shù)范圍的上限影響較大。
4)對比4:ki1參數(shù)的影響
圖11(a)為弱電網(wǎng)條件下ki1參數(shù)保持為2 500,系統(tǒng)控制器延時由480 μs變化至490 μs,系統(tǒng)由收斂變?yōu)榘l(fā)散狀態(tài),驗證了延時越大,系統(tǒng)穩(wěn)定對應的ki1參數(shù)范圍越小;圖11(b)為強電網(wǎng)條件下ki1參數(shù)為較大值4 000時,系統(tǒng)均處于穩(wěn)態(tài),說明強電網(wǎng)下ki1參數(shù)對系統(tǒng)穩(wěn)定性影響較小。

圖11 ki1參數(shù)上限的影響對比驗證Fig.11 Comparison of the upper limit of ki1
5 結(jié)語
LTP時域分析方法的優(yōu)勢在于對MMC的多頻率成分和內(nèi)部動態(tài)保留完整,且無需做復雜的多頻次展開,故適用于MMC并網(wǎng)系統(tǒng)穩(wěn)定性研究。本文建立了LTP時域小信號模型,研究了強、弱電網(wǎng)兩種工況下,控制器延時和FFCC的PI參數(shù)對系統(tǒng)穩(wěn)定性的影響規(guī)律。得出以下結(jié)論:
延時越大,系統(tǒng)越容易出現(xiàn)不穩(wěn)定現(xiàn)象。弱電網(wǎng)條件下,系統(tǒng)穩(wěn)定對應的kp1參數(shù)范圍下限受到延時影響,強電網(wǎng)下則受影響很小;無論電網(wǎng)強弱,其上限均受延時影響較大。弱電網(wǎng)條件下,ki1參數(shù)越大系統(tǒng)越容易不穩(wěn)定。強電網(wǎng)下,ki1參數(shù)對系統(tǒng)穩(wěn)定性影響較小。
針對以上結(jié)論有以下思考,并將在后續(xù)研究中完成。LTP與現(xiàn)有的小信號建模方法的對比還需進一步研究,角度在于:振蕩頻段、建模復雜程度、工程適用性等;本文僅考慮了FFCC的PI參數(shù),還需要探究控制器延時對外環(huán)、環(huán)流抑制控制、鎖相環(huán)等多種控制器的影響規(guī)律。從仿真結(jié)果圖來看,控制器延時改變了系統(tǒng)的頻率特性。在后續(xù)研究中將采用LTP頻域分析方法研究系統(tǒng)的振蕩頻率和靈敏度,從而進一步揭示控制器延時對系統(tǒng)不穩(wěn)定現(xiàn)象的影響。
猜你喜歡
工業(yè)設計(2022年8期)2022-09-09 07:43:20
中學生數(shù)理化·八年級物理人教版(2022年3期)2022-03-16 05:55:08
當代陜西(2021年2期)2021-03-29 07:41:24
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
媽媽寶寶(2017年3期)2017-02-21 01:22:28
中國塑料(2016年3期)2016-06-15 20:30:00