基于介質層耦合的柔性觸覺傳感器空間分辨率補償方法研究
2021-04-23 07:32:38陳英龍解佳森朱灃樟王斌丞弓永軍
液壓與氣動 2021年4期
關鍵詞:模型
陳英龍, 解佳森, 朱灃樟, 王斌丞, 弓永軍
(大連海事大學 船舶與海洋工程學院, 遼寧 大連 116000)
引言
近年來,隨著經濟的發展、科技的進步以及人們生活水平的提高,人機交互機器人正逐步融入醫療檢測、教育等領域[1-2]。觸覺作為感知信息的一種關鍵方式,在人機交互過程中起著非常重要的作用。因此,一種全柔性并且可大面積穿戴的電子皮膚成為了科研人員研究的熱點之一[3-4]。MITTENDORFER等[5]設計的一種模塊化的觸覺傳感單元,可構成不同大小的敏感“皮膚”實現觸覺感知。上述觸覺傳感器用作仿生皮膚時多采用剛性基體,缺乏應有的柔性和可穿戴性,在人機交互智能機器人彎曲部位中不宜廣泛應用。SHIRAFUJI S等[6]使用聚偏氟乙烯柔性壓電薄膜制作了一種仿生皮膚,可用于測量滑覺信息,但缺乏對靜態力的感知。CHOONG C L等[7]介紹了一種高靈敏度、高拉伸性的壓阻式觸覺傳感器,電阻能量損耗較大。由于柔性電容式壓力傳感器具有體積小、靈敏度高、低噪聲、耗能少、溫度漂移少等特點而受到廣泛的關注[8],并應用于多種電子設備中,例如電子皮膚、可穿戴電子設備等。黃英等[9]提出一種全柔性電容式觸覺傳感器,并設計成兩種不同的分離式陣列單元。WEI Peiqi等[10]介紹了一種多孔狀復合介質層電容式柔性離散型觸覺傳感器,空間分辨率較低,且陣列傳感器的尺寸較小,具有操作復雜、成本高等缺點。王迪等[11]研究單向大面積壓縮模式下聚二甲基硅氧烷(簡稱PDMS)軟材料的膨脹變形模型。竇海斌等[12]針對液壓作動系統的傳感器故障檢測開展研究工作,通過1個線性轉換將液壓系統的初始模型轉換成2個子模型,1個模型只含系統的不確定性,而另1個子系統只含傳感器故障,從而實現了不確定性和傳感器故障的完全解耦。馮世澤等[13]針對某特種液壓缸內置磁致伸縮位移傳感器發訊異常問題,使用 ANSYS Electronics 對磁環通過油管后的徑向磁感應強度分布進行了仿真分析,同時結合試驗研究得出磁環磁感應強度經不同相對磁導率油管作用下的磁感應強度,仿真與試驗結果基本一致。通過優化油管加工工藝,消除了油管的鐵磁性,解決了位移傳感器發訊異常問題。
以具挑戰性且應用潛力較大的接觸壓力測量的TAKEI K等[14]和汪浩鵬[15]的電子皮膚觸覺傳感器為例,其空間分辨率分別為4.0 mm×4.0 mm和4.5 mm×6.0 mm,接近人類皮膚。CHANDRA M等[16]提出了一種有2個電容的傳感單元的解決方案,電容排列緊湊,雖然使電容式觸覺傳感器的空間分辨率提高1倍,但分辨率仍然較低。CHANDRA M等[17]通過共用電極的2個電容的垂直疊加,在x和y方向上的空間分辨率增加了1倍,還通過理論設計等對法向力和剪切力進行了傳感演示,但仍存在空間分辨率偏低等問題。WATATANI K等[18]提出了一種新型的“陣列式”單片電路類似指紋的觸覺傳感器,可以獲取觸覺信息的高分辨率圖像表面,雖然獲得了100 μm的空間分辨率,但制作工藝復雜、成本較高。
針對現有的柔性電容式壓力傳感器存在空間分辨率偏低等問題,提出了一種基于整體介質層耦合結構的柔性傳感器,并且將建立傳感器接觸及擴散電容單元的數學模型,通過接觸及擴散電容對接觸位置進行準確判斷,顯著提高電容式柔性壓力傳感器的空間分辨率,可以應用于智能機器人對微小尖銳物體的精準抓取。
2 耦合式柔性觸覺傳感器設計
2.1 陣列觸覺傳感器模型與工作原理
電容式柔性觸覺傳感器模型三維結構三視圖如圖1所示,其結構可與平行板電容等效。因PDMS具有柔性、透明性、良好的延展性和生物兼容性等優點,本研究選用PDMS作為電容式傳感器的上、下層襯底,將一定量的PDMS主劑和固化劑以10∶1的體積進行配比,滴在KW-4B型勻膠機玻璃片上,通過控制勻膠機的轉速和勻膠時間可得到指定厚度的襯底。近年來,研究人員提出利用“滲流理論”混合導電性能較好的納米顆粒來提高介質層的介電性能,以改善傳感器的靜態特性。因碳系導電填料種類豐富,具有不易被氧化,同時能夠保證高分子材料的物理性能和機械性能,且穩定性優于金屬納米顆粒、成本較低等優點,而被廣泛用于填充介質層填料。選用質量分數為2.5%[19]的乙炔黑或者碳納米管[20]填充PDMS混合試劑介質層納米顆粒,將抽真空后的介質層復合物倒入3D打印的模具中,再放入真空烘干箱中,烘干待用。選擇一定長徑比的碳納米管, 制作柔性電極板。最后傳感器封裝方式選用PDMS自封裝[21]。
在傳統電容式柔性觸覺傳感器表面施加力F時(假設受力時極板面積不發生變化),由于考慮力F作用面積較大,作用區域內彈性介質層厚度會均勻減小Δd,缺少在力F作用耦合介質層下的相關模型研究。建立的模型,是當力F作用面積相對較小時,受力區域內的介質層厚度變化不均勻,受力區域下凹介質層呈圓錐形,在此基礎上建立耦合式介質層受力后的數學模型,并進行分析。
2.2 陣列觸覺傳感器耦合介質層的模型分析
傳感器施加的外力F與傳感器下凹圓錐型有一定的函數關系,即F=f(r0,h),其中r0表示圓錐的底面半徑,h表示圓錐的高。受力F作用后介質層下凹的圓錐面方程為:
(1)
其中,Z表示圓錐側面上一點距離錐頂所在平面的距離;x0,y0分別表示受力接觸點的橫、縱坐標;x,y分別表示橫、縱坐標軸的變量參數。
1) 單個傳感器介質層變形模型
當在陣列傳感器襯底上施加一個較小的作用力F1,該作用力只引起某一個傳感器的電容變化,在該傳感器內形成下凹的小圓錐,如圖2所示。
如圖3a所示的圓錐分析圖,底面半徑為r,圓心為m,高為h,母線為L。

(2)
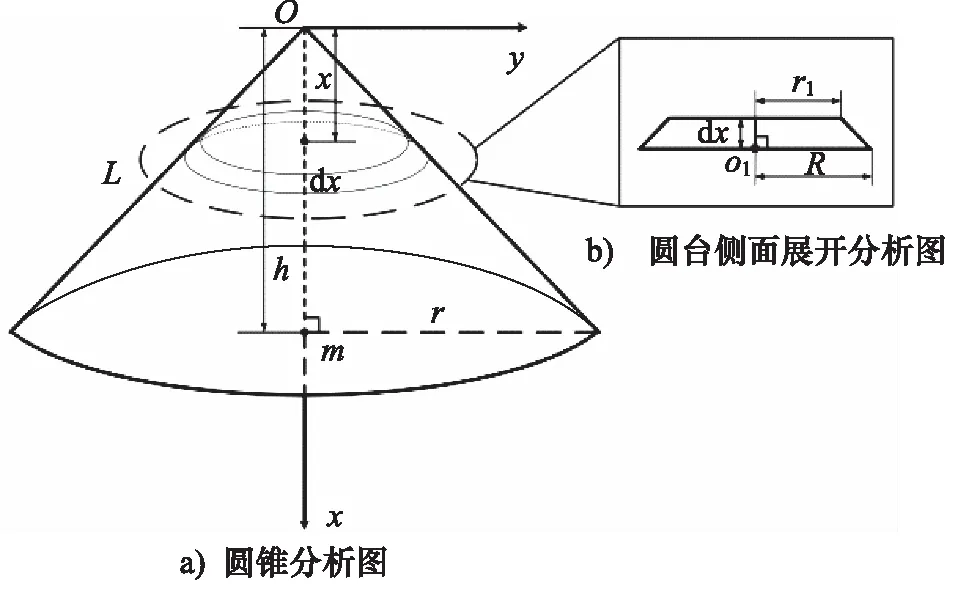
圖3 圓錐幾何分析圖
其中,C0表示初始電容;εr表示納米顆粒填充到PDMS硅橡膠的初始相對介電常數,其值與納米顆粒在基體中的填充量V、施加力F、彈性電介質厚度d0的變化量Δd有關,下同;ε0表示真空介電常數;d0表示傳感器兩極板間的初始距離;A表示電極板面積。
(3)
其中,dc表示小圓臺側面積引起的電容值;θ表示圓臺側面與其平行于下極板投影面的夾角。
N個小圓臺傳感器并聯在一起,已知并聯電容器電容求和與積分公式,聯立式(2)、式(3)得:
(4)
其中,C表示單個傳感器受力后的電容值;h表示圓錐的高。
2) 陣列傳感器介質層耦合變形接觸模型
當施加一個較大的作用力F2時,作用區域包含多個傳感器,即多個傳感器的電容會發生變化,在多個傳感器內形成下凹的大圓錐情況如圖4所示。
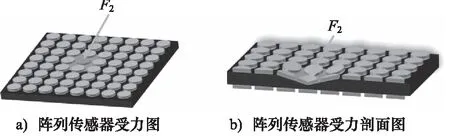
圖4 傳感器受力示意圖
對受力傳感器建立高分辨率數學模型。該模型中忽略各個傳感器電極板之間的間隙。以陣列中傳感器a的中心為原點建立Oxyz三維坐標系,如圖5所示。
結合式(1),已知大圓錐的半徑為r0,高為h,如圖5所示,由幾何關系得:

(5)
其中,d表示傳感器受力后兩極板間的距離。
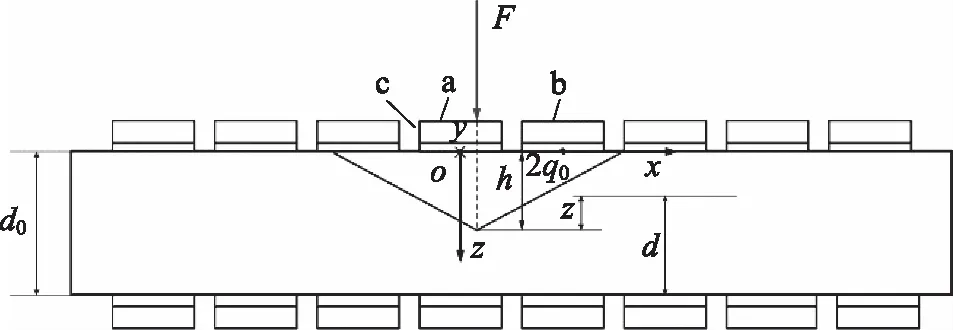
圖5 陣列傳感器三維坐標系簡圖
小傳感器半徑為q0,傳感器b的中心點坐標為(2q0,0),傳感器c的中心點坐標為(0,2q0),設接觸點在xOy平面內的坐標為(x0,y0),則在力F作用下介質層下凹的圓錐錐頂在xOy平面內的坐標也為(x0,y0),如圖6所示。
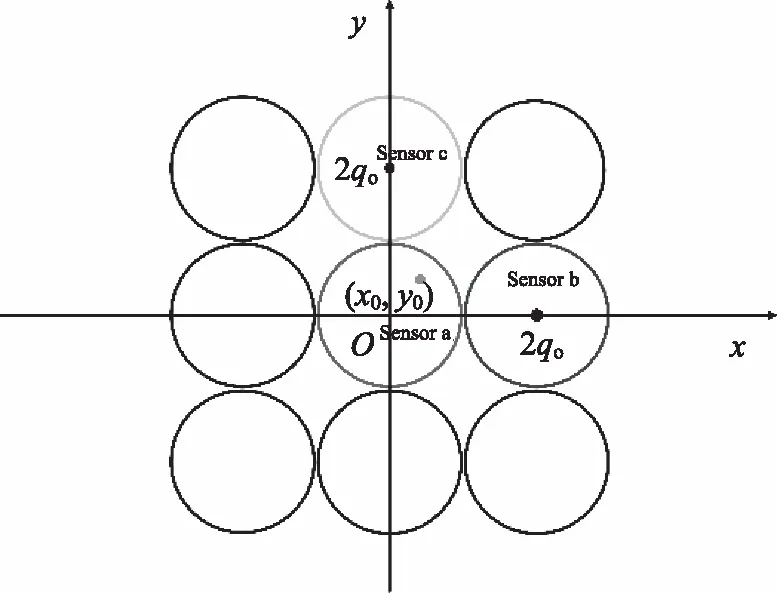
圖6 陣列傳感器二維坐標系簡圖
所有受力區域的傳感器根據電容公式(2)和二重積分原理都可以分別列出一個含有x0,y0,h等未知數的方程式,構成方程組,聯立起來即可解出未知參數x0,y0,h的值。相對介電常數εr與d0的變化量Δd成正相關[9],設εr=f(V,d0-h)。直角坐標系和極坐標系的參數轉化關系:x=rcosθ,y=rsinθ,dxdy=rdrdθ,由此可得:
(6)
其中,C1表示傳感器a的電容值。
結合圖6的坐標系,由上述傳感器a的電容計算公式(6)經過坐標平移可得傳感器b、傳感器c的電容計算公式分別為:
(7)
(8)
其中,C2,C3分別表示傳感器b,c介質層厚度變化后的電容值。
3 耦合式柔性陣列傳感器模型仿真分析
為了驗證上述耦合式介質層陣列傳感器空間分辨率的補償方法模型公式的合理性及正確性,使用MATLAB對其進行程序仿真試驗分析。
3.1 耦合介質層單個傳感器模型仿真分析
用仿真軟件對介質層變形小圓錐模型即式(4)進行試驗仿真,取6≤εr≤8進行模型仿真[19],下同。測得該傳感器的電容值C與介質層變形圓錐的高h之間的曲線關系如圖7所示,分析曲線可知:圓錐的高h與電容值C的曲線斜率逐漸增大,保持其他參數不變,在一定范圍增大圓錐的高h時,電容值C也隨之增大,可以得出傳感器的電容值C與圓錐的高h呈正相關。
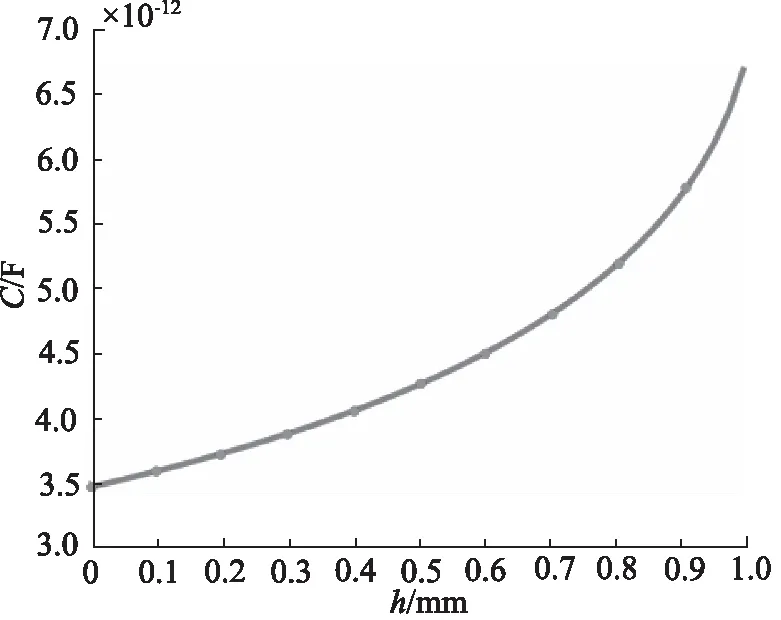
圖7 小圓錐模型仿真曲線
3.2 耦合介質層陣列傳感器模型仿真分析
在陣列傳感器上施加一個力F,在受力區域內一定能出現3個相鄰且電容值變化最大的傳感器,即傳感器a,b,c,且電容值分別為C1,C2,C3,選定傳感器a的電容值最大,即接觸點在傳感器a上,且C1>C2=C3。接觸點(x0,y0)一定在以O為圓心、以a0為半徑的圓上,則x0=a0cosα,y0=a0sinα,其中α表示a0所在直線與x軸所夾的銳角,α的取值范圍是0≤α≤π/2,方程如式(9)所示,b0,c0所列方程同理。
rdr
(9)

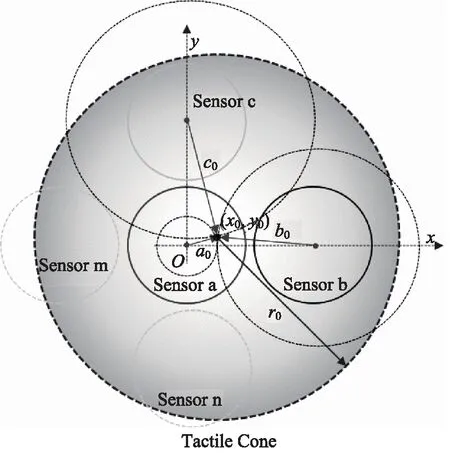
圖8 觸覺錐原理示意圖
取q0=5 mm,設定h/r0=0.05。對式(6)~式(8)陣列傳感器接觸模型進行程序仿真試驗。選取α=0,則x0=a0,y0=0,代入模型公式,編寫程序進行仿真,得到電容值C與h,a0,b0,c0之間的曲面圖,如圖9所示。分析圖中曲線的變化趨勢可知,保持其他參數不變:
(1) 當a0,b0,c0一定時,電容C隨h的增大而增大,如圖9b的曲線L1所示。曲線L1表示當a0=b0=c0=0.005 m時,C隨h的增大而增大的曲線;
(2) 當0≤a0≤0.005 m,0≤b0≤0.015 m,0≤c0≤0.015 m 時,C1隨a0的增大而減小,C2隨b0的增大而減小,C3隨c0的增大而減小,如圖9c的曲線L2所示。曲線L2表示當h一定時,C隨a0/b0/c0的增大而減小。在0≤a0≤0.005 m頂部區域出現波峰波谷,如圖9中淺色區域所示,可能的原因:因電容值過大而超出了該傳感器的量程,造成了該部分曲線出現不規則的起伏。
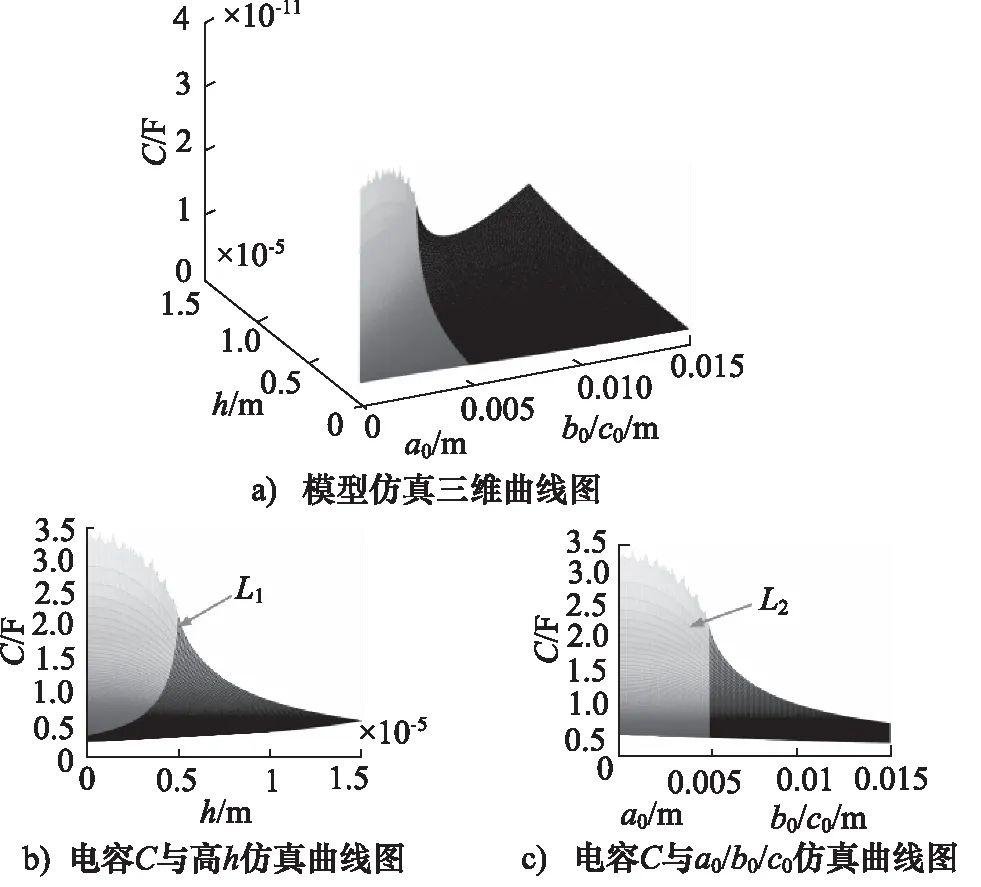
圖9 觸覺錐模型仿真曲線圖
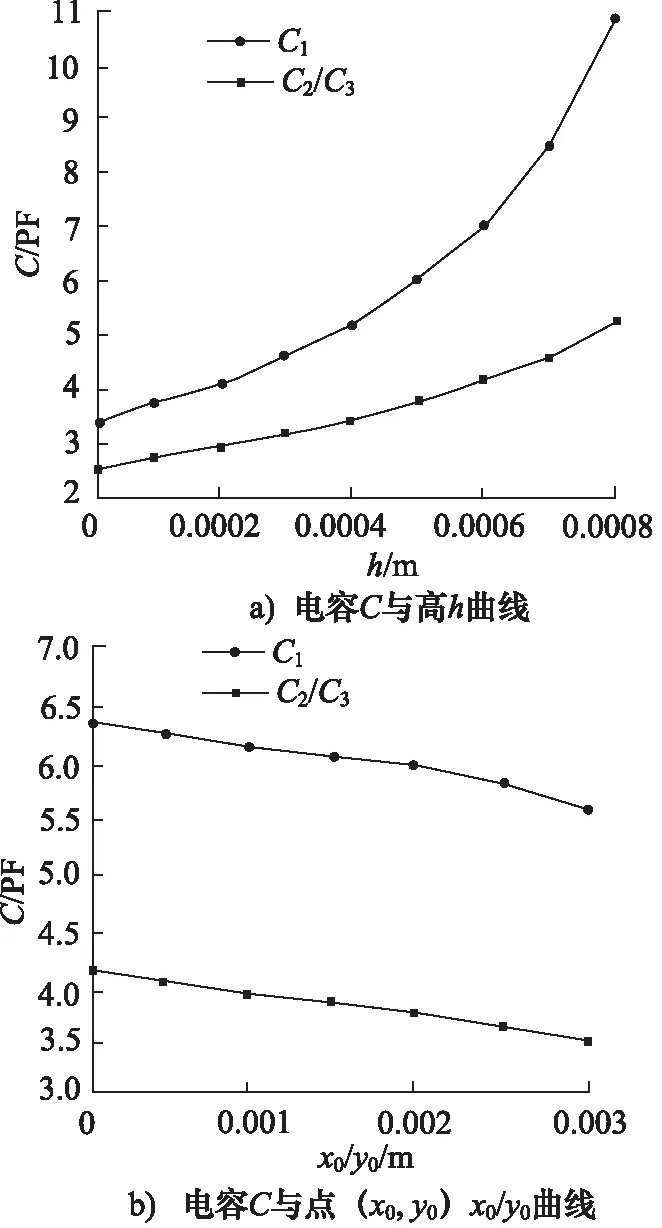
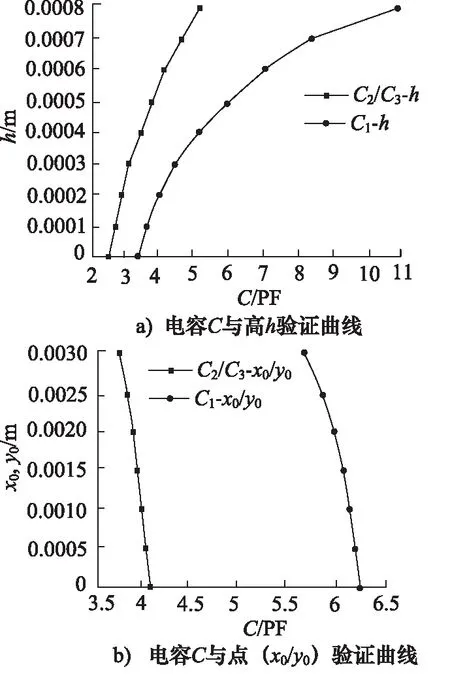
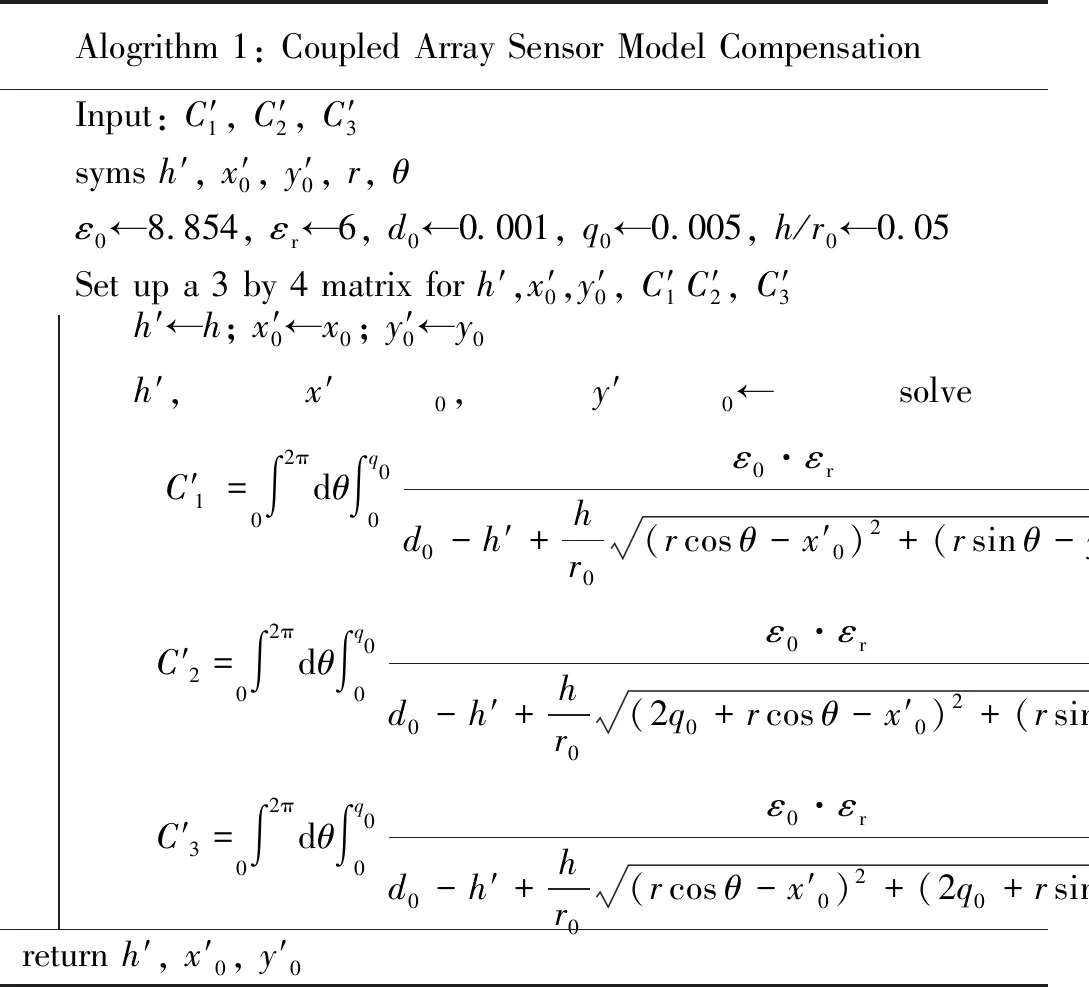
已知0≤h 針對目前電容式柔性觸覺傳感器的空間分辨率偏低等問題,設計了耦合式介質層結構的陣列傳感器,基于陣列傳感器力接觸模型電容式(6)~式(8),通過算法補償對耦合陣列傳感器力接觸點位置進行精準求解,該模型大大提高了智能機器人與較尖銳物體接觸的空間分辨率。編寫該模型的MATLAB仿真試驗驗證程序,對前面仿真求解試驗結果進行仿真試驗驗證。驗證結果顯示,保持其他參數不變, 輸入一組C1,C2, 圖10 仿真求解數據曲線圖 C3的值依次增大時,輸出對應的h隨之增大,如圖11中a)所示,驗證了電容C與高h之間的關系呈正相關;輸出對應的的x0和y0(且x0=y0)隨之減小,如圖11中b)所示,驗證了電容C與接觸點(x0,y0)的坐標值之間的關系呈負相關; 同時也驗證了模型式(6)~ 圖11 仿真試驗驗證曲線圖 相關文件程序偽代碼如下: Alogrithm 1: Coupled Array Sensor Model CompensationInput: C′1, C′2, C′3syms h′, x′0, y′0, r, θε0←8.854, εr←6, d0←0.001, q0←0.005, h/r0←0.05Set up a 3 by 4 matrix for h′,x′0,y′0, C′1 C′2, C′3h′←h; x′0←x0; y′0←y0h′, x′0, y′0← solveC′1=∫2π0dθ∫q00ε0·εrd0-h′+hr0(rcosθ-x′0)2+(rsinθ-y′0)2·rdrC′2=∫2π0dθ∫q00ε0·εrd0-h′+hr0(2q0+rcosθ-x′0)2+(rsinθ-y′0)2·rdrC′3=∫2π0dθ∫q00ε0·εrd0-h′+hr0(rcosθ-x′0)2+(2q0+rsinθ-y′0)2·rdrì?í???????????üty???????????return h′, x′0, y′0 提出了一種基于耦合式介質層結構柔性陣列傳感器,其應用于電子皮膚的柔性電容式傳感器的制作尺寸較大、操作簡便、成本較低,可大面積應用于人機交互機器人的彎曲部位,具有較強的可擴展性及可移植性,避免了剛性傳感器不宜穿戴、維護性差等缺點,可實現真正意義上精確的觸覺感知功能。 建立了傳感器接觸及擴散電容單元的數學模型,在不降低電極面積的前提下,能夠對接觸位置進行準確判斷,顯著提升了柔性電容式陣列傳感器的空間分辨率,其為0.2 mm×0.2 mm。闡述了該柔性電容式觸覺傳感器的制作材料、工作原理、柔性傳感器結構模型、分辨率數學模型以及介質層一體化結構設計等,同時使用MATLAB仿真軟件進行數學模型試驗仿真,仿真結果驗證了柔性電容式陣列傳感器耦合式介質層的算法模型正確性及精確性,同時也顯著提高了陣列傳感器的空間分辨率。4 耦合式陣列傳感器模型補償算法

5 結論
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
