直升機電液伺服飛控作動系統設計與實現
2021-04-23 07:20:52滕利強王文山劉藝寧余書秀
液壓與氣動 2021年4期
滕利強, 王文山, 劉藝寧, 余書秀
(航空工業慶安集團有限公司, 陜西 西安 710077)
引言
隨著飛行控制技術的發展,國內外先進直升機的飛行控制系統已普遍采用電傳操縱技術,與應用傳統助力機械操縱技術的飛行控制系統相比,采用電傳操縱技術的飛行控制系統可極大地改善直升機的飛行品質,減輕飛行員的操縱負擔[1],并為主動控制技術和綜合飛行控制技術的直升機領域應用奠定基礎。
飛控作動系統是飛控系統的子系統,主要由控制單元和作動器組成。在直升機領域,該系統可根據飛控計算機(FCC)的指令調節槳距或驅動舵面,而常規直升機具有操縱面少、槳葉間耦合度高、作動器故障后無法重構等特點,故該系統可直接影響飛行安全,是機上的重要子系統。
當前,國外主流直升機公司所生產的先進直升機已普遍采用電傳操縱技術,相關機型的飛控作動系統有采用集中式架構、分布式架構、電液伺服作動技術和直接驅動作動技術等[2-4],在技術應用上呈現出多樣性。
而我國直升機領域由于受相關技術的發展限制,現役絕大多數國產直升機的飛控作動系統仍然采用傳統的液壓助力作動技術,僅某型直升機實現了電傳作動技術的工程應用,與國外現狀相比技術單一性,沒有呈現出技術多樣性。
基于上述因素,本研究在對比分析國外先進直升機飛控作動系統的基礎上,總結相關技術特點,以國內某型直升機為目標應用平臺,對飛控作動系統進行架構設計和部分關鍵技術研究,并借鑒相關系統的研制經驗[5-6],以建模仿真和工程試驗的方法對系統特性進行驗證。計劃通過本項研究為我國直升機電傳飛控作動系統領域的技術多樣性進行有益探索。
1 國外典型先進直升機飛控作動系統對比
目前國外先進的直升機生產公司主要集中在歐洲和美國,典型代表公司有空客直升機公司和美國西柯斯基公司等,所生產的先進直升機體現了當今直升機領域所使用的新技術和發展方向。因此,本研究將對前述兩家公司所生產的典型先進直升機在飛控作動系統方面進行對比分析,并結合我國相關領域的技術現狀開展研究工作。
1.1 NH-90直升機
NH-90是空中客車直升機公司研制的一款雙發中型單旋翼多用途直升機。該機是全球首款采用電傳操縱技術的投入使用機型[4],被譽為歐洲直升機工業實力的新標桿。該機飛控作動系統的架構如圖1所示,系統具有以下特點:
(1) 系統采用分布式架構,作動控制器獨立于FCC,通過電纜與FCC進行信息傳輸;
(2) 系統整體采用電氣四余度、液壓機械雙余度構型,由2臺作動器控制器,3臺主槳作動器和1臺尾槳作動器組成;
(3) 主槳作動器和尾槳作動器均為液壓雙余度串聯構型,主-主工作,采用旋轉式直接驅動閥(R-DDV)技術,由電氣四余度電機共軸驅動2個R-DDV,實現雙系液壓的作動筒油液分配;
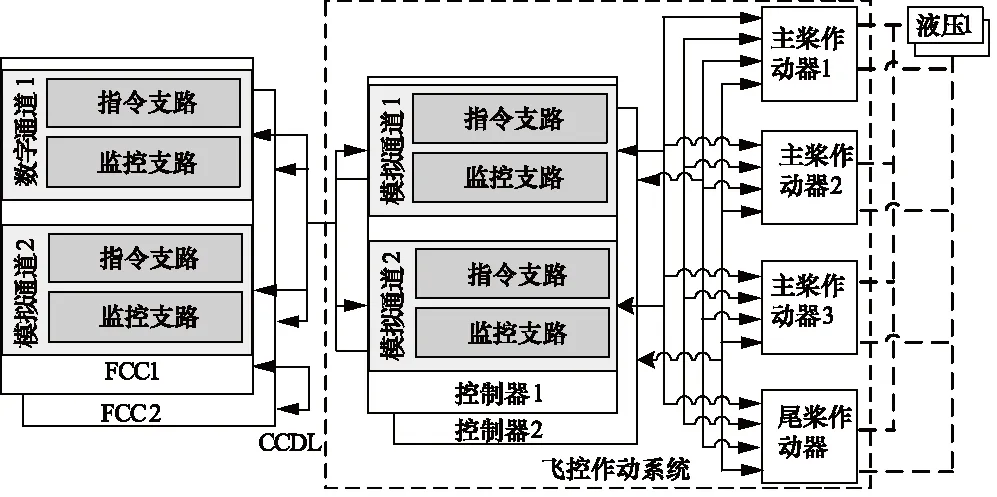
圖1 NH-90直升機飛控作動系統架構
(4) 控制器采用模擬伺服控制技術,具有較強的抗干擾能力,單臺控制器內有2個伺服控制通道,單通道采用指令+監控構型,以保證飛控作動系統具有電氣三次故障-工作的容錯能力。
1.2 RAH-66直升機
RAH-66“科曼奇”直升機是美國波音公司和西科斯基公司合作研發的一款雙發單旋翼隱身武裝/攻擊直升機,是美國首款采用電傳操縱技術的直升機。自該機開始美國先進直升機進入了電傳操縱時代,通過該機所掌握的三余度電傳操縱技術被用于后續多個機型,例如,S-92直升機和最新改進型CH-53K與UH-60M直升機等。該機的飛控作動系統具有以下特點[2]:
(1) 系統采用集中式架構,作動器的控制單元以板卡形式集成在FCC中;
(2) 系統整體采用電氣三余度、液壓機械雙余度構型,由3臺FCC中的3個獨立作動器控制單元,3臺主槳作動器和1臺尾槳作動器組成;
(3) 主槳作動器為液壓機械雙余度并聯單耳輸出構型,尾槳作動器為液壓雙余度串聯構型,均為主-主工作,采用電液伺服閥(EHV)技術,由2臺獨立的電氣三余度EHV,實現雙系液壓的作動筒油液分配。
1.3 S-92直升機
S-92直升機是美國西科斯基飛機公司研制的一款雙發中型單旋翼多用途直升機,且是全球首款通過美國和歐洲適航認證的直升機,具有很高的安全性。該機采用電傳操縱技術,飛控作動系統的架構、余度配置和作動技術等特點均與RAH-66直升機相同,系統架構如圖2所示[3]。
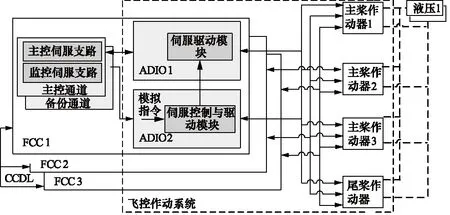
圖2 S-92直升機飛控作動系統架構
該型直升機的作動器控制單元采用模擬伺服控制技術,具有較強的抗干擾能力,單臺FCC內有1個伺服控制通道,由于FCC采用主控+監控構型,因此,可以保證飛控作動系統具有電氣二次故障——工作的容錯能力。
1.4 對比分析
根據上述三種采用電傳操縱技術的國外典型先進

表1 國外典型先進直升機飛控作動系統對比
直升機介紹,梳理出相關飛控作動系統的技術特點,如表1所示。
對表1所示進行分析,可以得以下結論:
(1) 常規單旋翼直升機具有操縱面少、槳葉間耦合度高、飛控作動器故障后無法重構等特點,因此,為了保證飛行安全,飛控作動系統多采用電氣三余度或四余度;
(2) 在液壓余度方面,飛控作動器的液壓余度多為兩余度;
(3) 與機上其他系統相比,飛控作動系統具有較高的頻響要求,且為了提高作動系統的抗電磁干擾能力,系統通常采用模擬控制技術;
(4) 三型直升機中,NH-90直升機的飛控作動器采用DDV,與EHV相比,該類型閥雖具有抗油液污染能力強的特點,但是驅動電流通常為安培級,遠大于伺服閥工作所需的毫安級電流,電功耗和發熱量也更大。其他兩型直升機的飛控作動器則采用EHV,且從目前所檢索到的資料來看,現役采用電傳操縱技術的大多數固定翼飛機和直升機飛控作動器多采用EHV,并且隨著EHV技術的發展,EHV的抗油液污染能力已經提升。
綜上所述,并結合當前國產直升機飛控作動系統的技術現狀,本研究以國內某型直升機為設計使用平臺,確定所研究的直升機飛控作動系統設計目標為:
(1) 集中式架構;
(2) 電氣四余度、液壓機械雙余度配置;
(3) 伺服控制采用模擬控制技術;
(4) 采用EHV進行作動器油液控制。
計劃通過上述研究,以期實現電液伺服作動系統和相關技術的直升機飛控領域應用拓展。
2 系統關鍵技術研究
根據上述設計目標,并結合飛控作動系統的組成和特點,將從系統架構設計、伺服控制和伺服作動等三方面開展相關技術研究。
2.1 高安全系統架構設計技術
根據確定的直升機電傳飛控作動系統設計目標,設計的系統架構如圖3所示,系統由4塊伺服控制板卡、3臺主槳作動器和1臺尾槳作動器組成。其中,單塊伺服控制板卡上設計有4個伺服控制支路,分別控制4臺作動器的1個電氣余度。主、尾槳作動器均設計為液壓機械雙余度串聯構成。
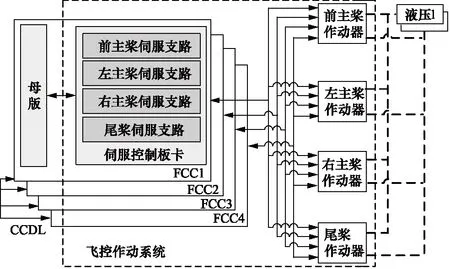
圖3 飛控作動系統架構
根據上述系統架構,并結合系統工作原理,在參考《民用機載系統和設備安全性評估過程的指南和方法》[7]的基礎上,對系統進行功能危險性分析,確定“飛控作動系統喪失伺服功能”為災難性事故,同時采用故障樹分析的方法對已確定的災難性事故進行定量分析,故障樹的底事件數據來源于《非電子零件可靠性數據》[8]和《電子設備可靠性預計手冊》(GJB/Z 299C—2006),其中電子器件的可靠性數據是根據手冊中的相關失效率預計模型計算,在確定公式中的相關系數時考慮了產品的使用環境,并借鑒了前期相似產品計算可靠性數據時的選定系數。這里僅從設計角度確定產品的可靠性數據,以此對系統架構進行初步安全性分析。
據此建立的“飛控作動系統喪失伺服控制功能”故障樹如圖4所示,經計算采用該架構的直升機飛控作動系統發生喪失伺服功能的失效概率約為6.734×10-10/FH,而民用直升機安全性風險分類中要求的發生災難性事故的概率應不大于1×10-9/FH[9],因此,所設計的直升機飛控作動系統架構滿足安全性設計目標,具有高安全的特性。
采用該架構的系統電氣部分至少具有電氣二次故障-工作的容錯能力,由于采用集中式架構,若FCC部分采用主控+監控架構,并完善相應的余度管理策略,則系統具備電氣三次故障-工作的容錯能力。對于飛控作動器由于采用獨立的液壓機械雙余度設計,故可以保證系統液壓機械部分具有一次故障-工作的容錯能力。
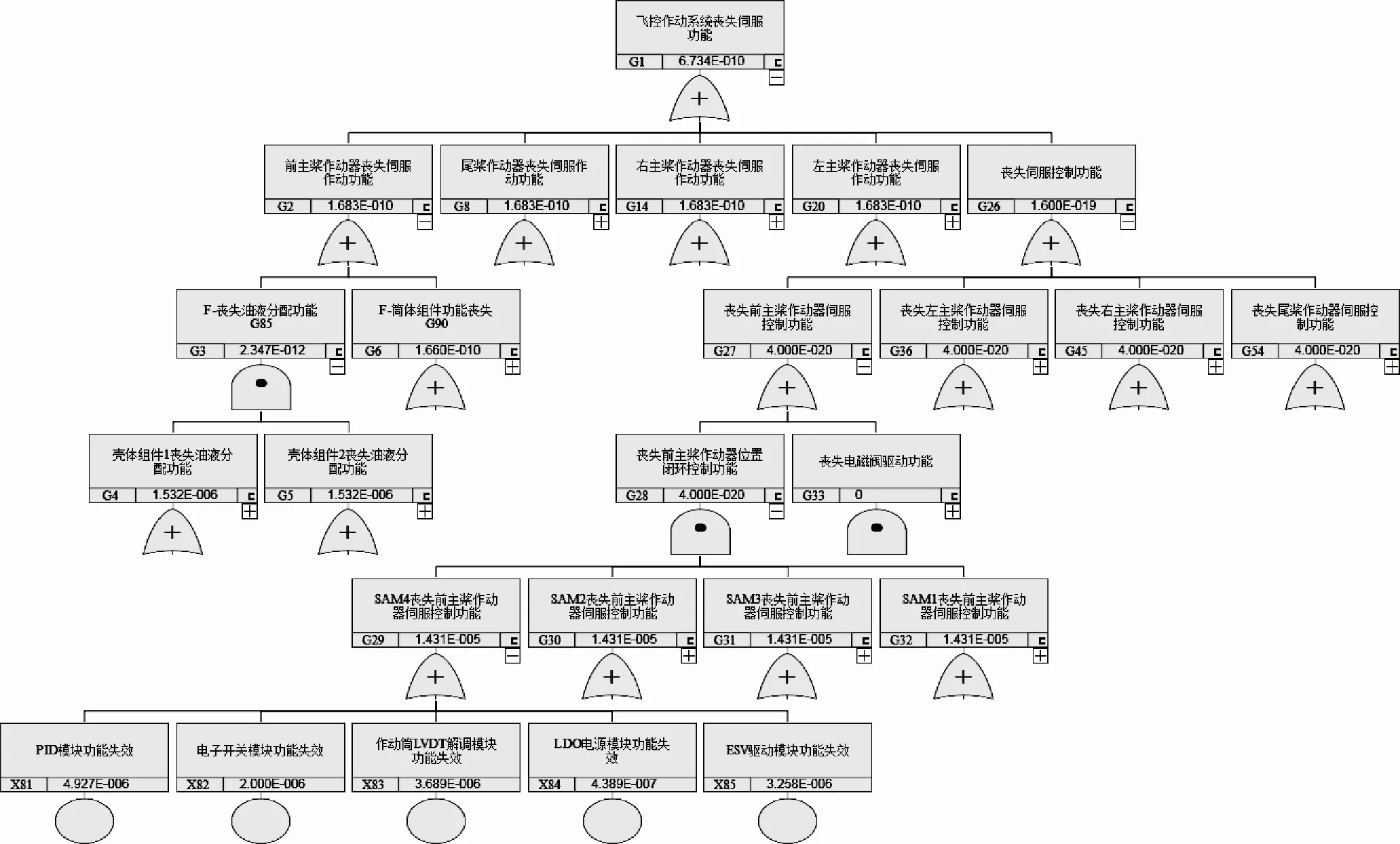
圖4 飛控作動系統喪失伺服功能故障樹
2.2 高可靠伺服控制技術
伺服控制單元作為飛控作動器的位移控制和余度管理部分,其可靠性直接影響到飛控作動系統的可靠性,甚至整個飛控系統的可靠性。同時伺服控制單元作為機上電子單元,所處電磁環境較為復雜,且飛控作動系統具有較高的頻響要求。
因此,為了提高伺服控制單元的抗電磁環境干擾,滿足系統的高頻響要求,并結合第1節的對比分析結果,系統的伺服控制和故障監控等功能單元采用模擬技術實現,而本系統為電氣四余度,故障監控信號較多,若仍采用模擬技術實現余度管理,則相關邏輯電路規模較為復雜,因此,本方案采用FPGA(現場可編程門陣列),利用其可編程、運行快、集成度高和靈活性強等特點[10-11],實現系統余度管理和邏輯信號處理,以期降低伺服控制單元的硬件復雜度,滿足系統對伺服控制單元的高可靠性需求,該單元的功能原理框圖如圖5所示。
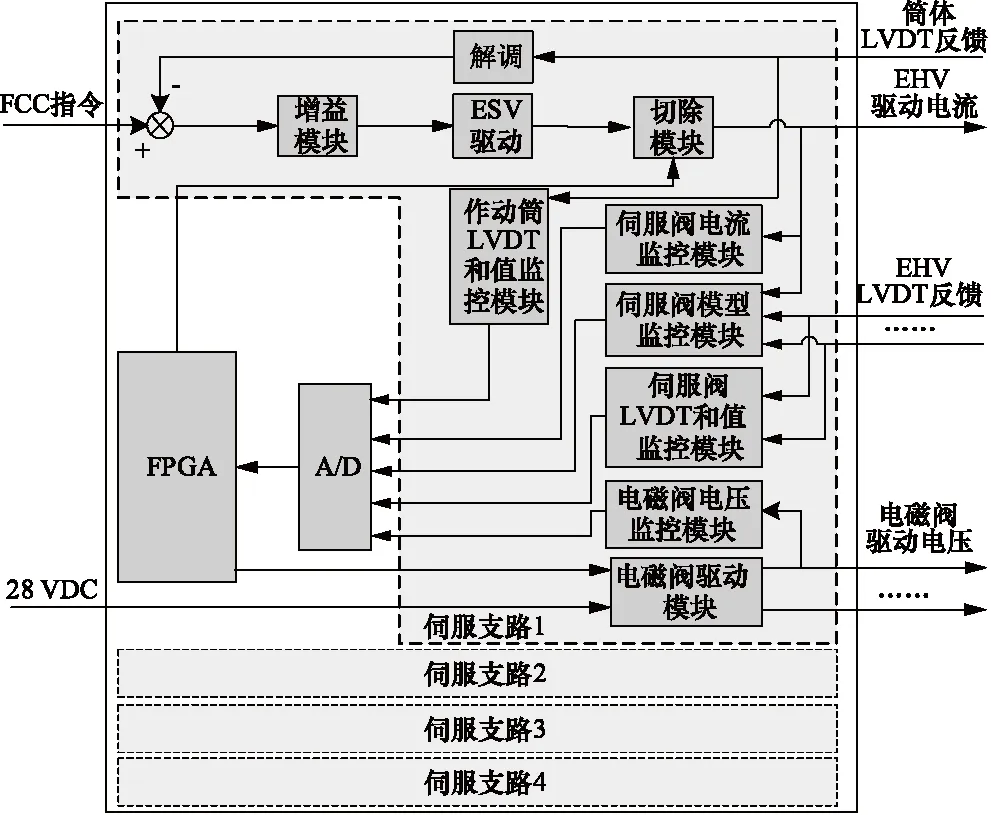
圖5 伺服控制單元功能原理框圖
2.3 高安全伺服作動技術
作動器作為飛控作動系統的末端執行單元,可在伺服驅動單元的控制下調節槳葉槳距,在系統中具有不可替代性,產品失效后將無法進行作動器間的重構,特別是主槳作動器,其安全性可直接影響直升機的飛行安全。
設計的作動器功能原理框圖如圖6所示,液壓控制模塊1上的伺服閥2可根據控制單元發出的驅動電流實現油液的流量和流向控制,電磁閥3可根據控制單元發出的驅動電壓通過控制高壓油液實現模態轉換閥4的開啟,從而使伺服閥負載口的油液經模態轉換閥與作動筒5的2個負載腔溝通,最終實現作動器活塞桿的輸出位移控制。
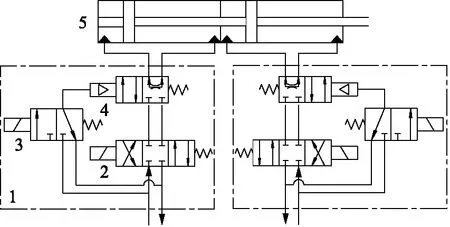
圖6 作動器功能原理框圖
根據第1節的對比分析結果,并結合有關電液伺服閥的技術特點[12],本方案作動器采用高可靠性的射流管式電液伺服閥。該類型伺服閥抗污染能力強,比傳統噴嘴擋板式伺服閥的抗污染能力提高一個數量級,可在油液清潔度NAS8級條件下長期可靠工作,且在電氣失效或射流管堵塞后,主控閥能夠在反饋桿的作用下自動復位,避免發生伺服閥故障所導致的滿舵現象。同時,為了提高伺服閥的故障-安全能力, 伺服閥的主控閥安裝了線位移傳感器監控閥芯位移,通過與控制器中的伺服閥模型輸出位移比對可及時發現伺服閥潛在的液壓機械故障,并通過控制電磁閥的斷電,使模態轉換閥復位,此時故障伺服閥的負載口油液被堵住,而作動筒的進回油口被旁通,該側活塞桿做跟隨運動,以避免影響正常伺服閥側的活塞桿運動。該方式提升了作動器的故障容錯能力,并且液壓控制模塊采用了分體式設計,可避免單側殼體的結構故障發生雙側蔓延。上述措施均可有效提升作動器的安全性。
3 系統仿真建模與分析
本系統工作所需的控制指令已由飛控系統控制律解耦,所以可單獨對主、尾槳作動系統進行建模仿真分析。因2個子系統中的被控作動器工作原理相同,僅本體參數存在差異,故這里僅以主槳作動系統為例進行建模仿真分析說明。
3.1 主槳作動系統仿真建模
根據系統架構、控制原理和作動器組成原理,選取AMESim軟件液壓模型庫、機械模型庫和信號與控制模型庫中自帶的基礎模型[13],并借鑒相關系統的建模經驗[14-15]。據此搭建的電氣四余度、液壓機械雙余度主槳作動子系統的仿真模型,如圖7所示,并根據系統的設計結果對仿真模型進行參數設置,主要參數如表2所示,設置的系統仿真時間為1 s,通信間隔為0.01 s。
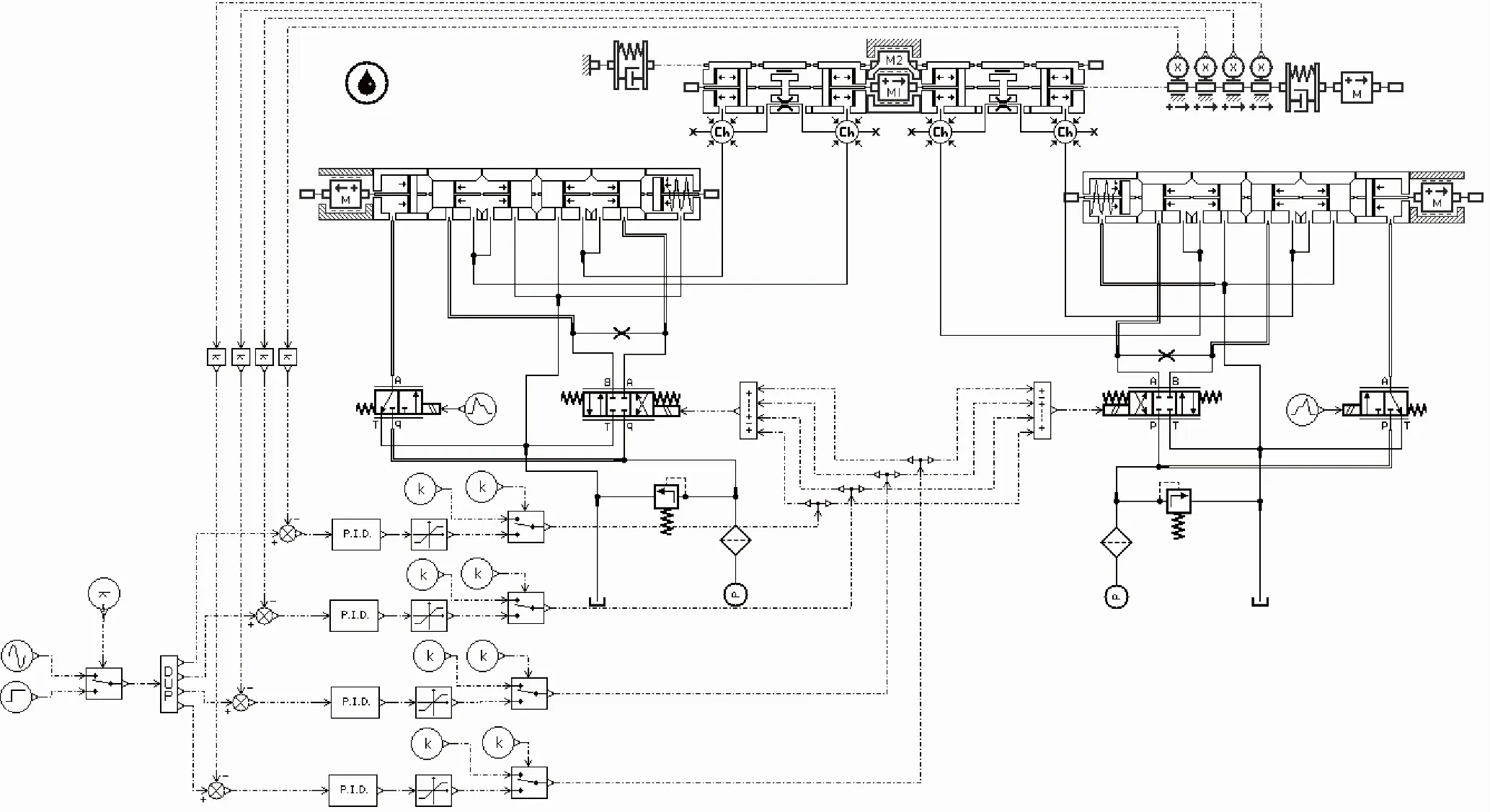
圖7 主槳作動子系統仿真模型
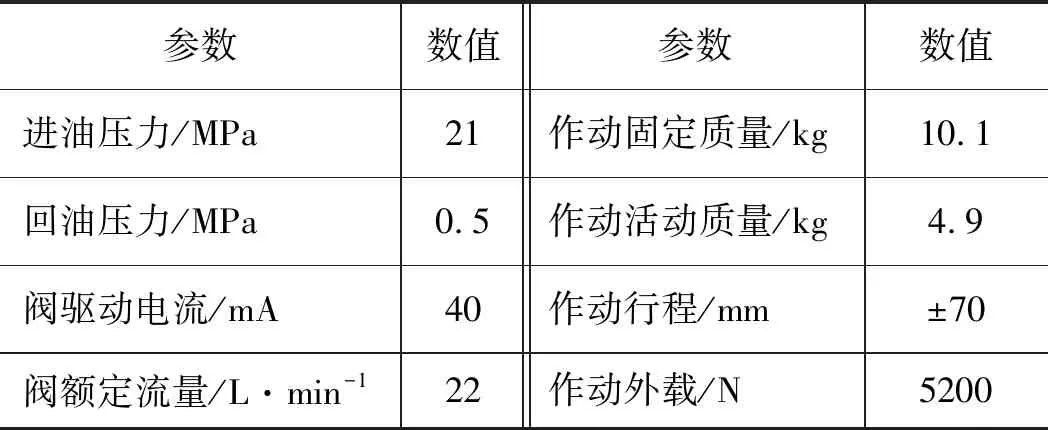
表2 主槳作動子系統主要參數
3.2 系統動態特性分析
因系統采用電氣四余度設計,故這里關注系統在不同余度下的動態特性,且為了方便對比分析,保證系統在不同余度下的仿真輸入指令相同,輸入的階躍指令和正弦指令幅值均為1 V(10%F.S),其中系統的四余度階躍響應曲線和伯德圖如圖8和圖9所示,系統在不同余度下的動態特性指標如表3所示。

圖8 四余度主槳作動子系統階躍響應
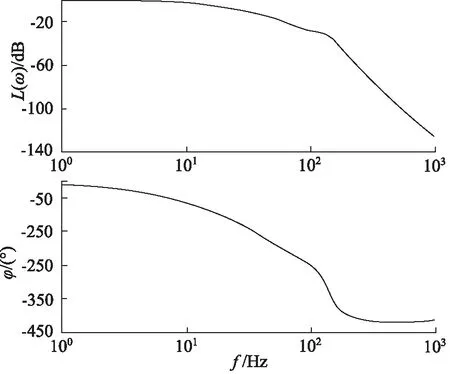
圖9 四余度主槳作動子系統伯德圖
3.3 仿真結果對比分析
根據上述仿真結果可知,系統在相同指令和控制參數,不同電氣余度工況下時,四余度和三余度工作時的響應時間均滿足不大于0.1 s的設計要求;系統雙余度工作時的響應時間雖有所延長,但不大于0.12 s,屬于電氣余度降級后的可接受范圍;且系統在三種工況下對階躍信號的響應穩定,無超調和振蕩現象。
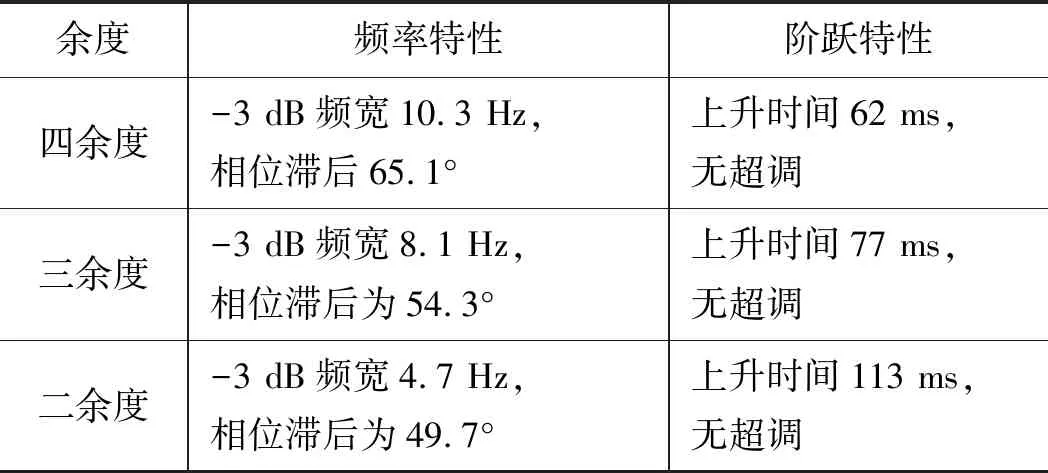
表3 主槳作動子系統不同電氣余度動態特性
當系統處于電氣四余度與三余度工作時,幅值衰減到-3 dB的頻寬均滿足不小于8 Hz的設計要求,雙余度工作時的頻寬為4.7 Hz,屬于電氣余度降級后的可接受范圍,并且系統在三種工況下的相位滯后均小于60°,滿足相應的設計要求。
通過上述三種工況下的仿真結果分析可知,系統電氣四余度、三余度工作時,均具有良好的動態性能,可以保證直升機在飛控作動系統發生電氣單余度故障時,仍具有較好的機動性,不增加飛行員的操縱負擔。當系統工作于電氣雙余度時,系統頻寬不小于4 Hz,此時系統仍具有較好的動態性能,可以滿足電傳飛控作動系統電氣二次故障時的飛行員操縱需求。
4 系統實物驗證與分析
在完成系統方案設計、關鍵技術研究和性能仿真分析后,對直升機電傳飛控作動系統所涉及的伺服控制單元和主、尾槳電液伺服作動器進行了實物加工與驗證,其中,主槳作動子系統的試驗現場如圖10所示。

圖10 主槳作動子系統試驗現場
相關試驗分為功能試驗和性能試驗,其中功能試驗主要驗證余度管理功能,該試驗通過模擬液壓失效故障、伺服控制單元斷電故障和控制與作動器間的斷線故障等方式進行驗證;性能試驗的主要測試項和測試結果如表4所示,由表4經分析可以得出,所研制的主槳作動子系統主要技術指標均滿足設計要求,達到了研制目標。
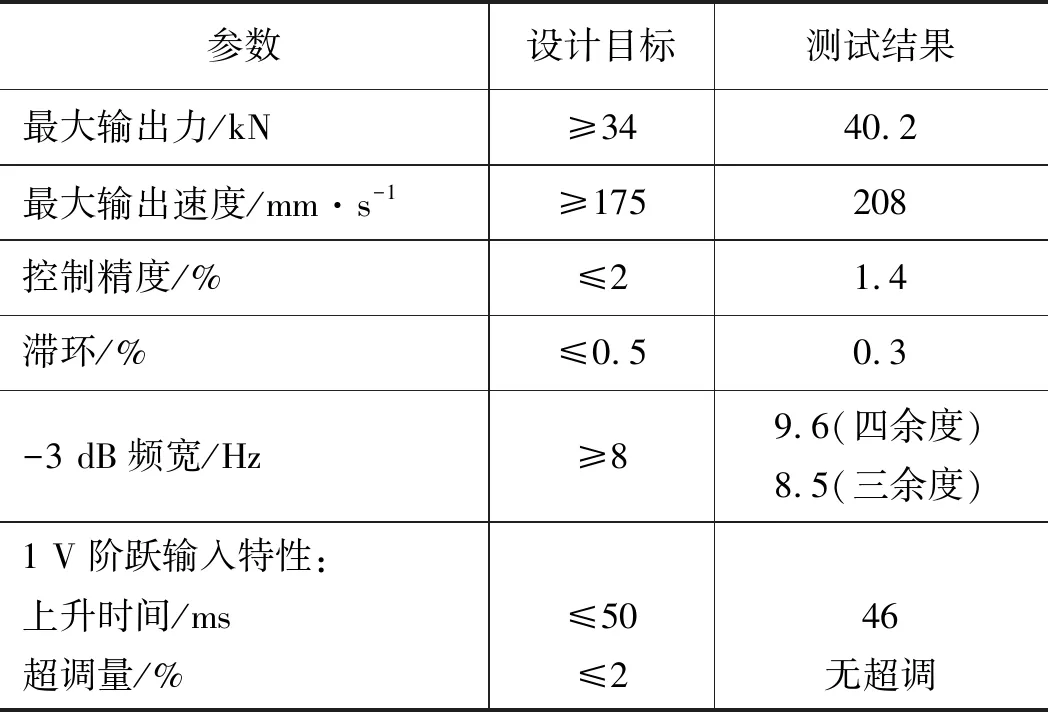
表4 主槳作動子系統主要測試結果
5 結論
本研究在對比分析國內外典型先進直升機電傳飛控作動系統技術特點的基礎上,以某型直升機為目標使用平臺,設計并實現了一種基于FPGA和射流管式伺服閥的電氣四余度、液壓機械雙余度直升機電傳飛控作動系統,通過本研究可以得出以下結論:
(1) 相較于數字伺服控制技術,采用模擬伺服控制技術的飛控作動系統能夠快速響應FCC指令,并具有較強的抗干擾能力;同時,結合系統特點采用FPGA實現邏輯信號處理和余度管理,簡化了控制電路的復雜度,提升了伺服控制部分的可靠性;
(2) 在直升機飛控作動方面,實現了國外直升機飛控作動器所常采用的電液伺服作動技術實物應用研究,并通過射流管式伺服閥和伺服閥模型監控的方式提升了作動器的可靠性與安全性;
(3) 基于FPGA和射流管式電液伺服閥的電氣四余度、液壓機械雙余度直升機電傳飛控作動系統的成功研制,為我國直升機電傳飛控作動系統領域的技術選擇提供了多選項。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
汽車維修與保養(2019年7期)2020-01-06 03:30:42
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
汽車維護與修理(2016年10期)2016-07-10 08:17:41
汽車維修與保養(2015年12期)2015-04-18 07:51:49
汽車維修與保養(2015年6期)2015-04-17 03:31:50
