零磁通式電動懸浮等效模擬系統的特性分析與實驗
2021-04-23 14:53:16王一宇宋旭亮馬光同
電工技術學報 2021年8期
關鍵詞:有限元
王一宇 蔡 堯 宋旭亮 李 剛 馬光同
零磁通式電動懸浮等效模擬系統的特性分析與實驗
王一宇1蔡 堯2宋旭亮1李 剛1馬光同1
(1. 牽引動力國家重點實驗室(西南交通大學) 成都 610031 2. 西南交通大學電氣工程學院 成都 610031)
該文提出一種等效模擬零磁通式電動懸浮的系統,闡述系統的工作原理和結構組成,并結合有限元仿真與實驗測試對系統的電磁力特性進行分析。建立系統的三維有限元模型,研究了線圈運動速度、磁體垂向與橫向偏移、線圈極距對系統性能的影響規律。研制樣機并進行實驗測試,測試了不同工況下懸浮力的變化情況,并與仿真結果進行對比分析,證明了有限元模型的準確性與可靠性。另外,實驗樣機實現了磁體的起浮,為零磁通式電動懸浮在軌道交通的應用與設計提供了理論依據。
零磁通式電動懸浮 等效模擬 有限元分析 電磁力特性
0 引言
目前一般認為傳統輪軌列車的最高營運速度約為350km/h[1],輪軌黏著力及弓網關系等因素限制其速度進一步提升,為達到更高效的運輸要求,非接觸運行的磁浮列車受到越來越多的關注。2019年9月,國家印發《交通強國建設綱要》提出研發“時速600km級的高速磁懸浮系統”。磁懸浮列車已成為未來高速軌道交通發展的一種趨勢。
根據懸浮原理的不同,磁懸浮技術目前可大致分為常導電磁懸浮(Electromagnetic Suspension, EMS)和超導電動懸浮(Electrodynamic Suspension, EDS)[2-4]。電磁懸浮是依靠車載常導電磁鐵與鐵磁軌道相互吸引而實現列車懸浮,雖然德國將該技術開發得較為成熟,但其閉環控制系統復雜,且懸浮氣隙較小(8~10mm),隨著列車速度的提高,控制難度相應提高,且直線電機電樞繞組的電阻較大,在列車高速大推力運行時,銅耗和鐵耗均較大,導致電機繞組發熱嚴重,運行效率低[1];而超導電動懸浮技術是利用車載超導磁體與地面軌道線圈之間感應耦合而產生的排斥性懸浮力使列車懸浮,雖然該種懸浮方式在靜止或低速下無法實現懸浮,但在高速下具有高浮阻比、懸浮間隙大(約100mm)、自穩定等優勢[5]。因此,就未來軌道交通發展需要的高速運行工況而言,超導電動懸浮技術更具優勢。
電動磁懸浮列車由美國的J. R. Powell和G. T. Danby于1966年提出[6]。隨后,世界多國紛紛投入到這種新穎懸浮方式的研究中[7-20]。而日本自電動磁懸浮列車概念提出至今,一直堅持對超導電動懸浮技術進行研究。日本鐵科院不僅建立了電動磁懸浮列車電磁力解析計算模型,還在此基礎上,結合動力學方程,引入阻尼線圈對列車振動進行優化設計,研究表明,半主動控制的阻尼線圈在減小供電量的同時,可有效抑制電動磁懸浮列車的振動[13]。在工業應用上,日本不斷對電動磁懸浮列車進行更新換代,至今已研發了ML、MLU、MLX系列及基于MLX的L0車型。2015年,日本研發的L0系列電動磁懸浮列車達到了603km/h的地面軌道交通最高速度,引起了媒體和國際鐵路行業的高度關注。另外,列車最高設計速度為500km/h的日本磁懸浮中央新干線(東京至名古屋區間,共286km)預計于2027年開通運營[14-15]。
而中國對電動磁懸浮列車的研究目前只處于起步階段。萬尚軍等基于場-路相結合的分析方法,通過等效電路矩陣微分方程對地面線圈感應電流進行求解,采用虛位移法得到列車不同工況下的電磁力,對比分析了有無橫向交叉連接結構的懸浮與導向性能。結果表明,橫向交叉連接能有效地提高列車的懸浮與導向剛度,增強系統的穩定性[16]。王志濤等基于動態電路理論,結合諧波近似與畢奧薩伐爾定律推導了超導磁體與地面線圈之間的時變互感計算公式,基于動態電路理論建立了電動磁懸浮列車的場-路-運動耦合模型,采用能量法對列車的電磁力進行計算,并利用日本山梨實驗線數據對計算模型進行驗證[19]。陳殷等針對現有單邊導體板式電動懸浮浮阻比小的缺點,提出了一種由導體板與雙邊Halbach永磁陣列構成的懸浮系統,建立并求解了空間矢量磁位方程,結合計算得到渦流分布與空間磁場,推導電磁力的二維數學表達式,并通過有限元仿真對解析模型進行驗證[20]。由此可知,國內對電動懸浮列車的研究尚停留于理論階段,實驗論證較少,這難以實現電動磁懸浮列車在國內的應用化與運營化。而對電動磁懸浮列車進行實驗研究,最直接、最理想的方式是建立全尺寸或縮比實驗線對列車工況進行模擬,但由于電動磁懸浮列車需要一定的速度才能起浮,其實驗線存在占用空間大、建設時間長、投資成本高等問題。因此,本文提出一種等效模擬零磁通式電動懸浮系統,可在室內完成對電動懸浮列車的等效模擬實驗,建立三維有限元仿真模型,對系統的電磁力及其特性進行計算分析,并研制實驗樣機,通過實驗測試來驗證仿真模型的準確性。本文的研究成果將為電動懸浮實驗研究提供參考,同時為電動懸浮的應用與設計提供理論 依據。
1 工作原理和系統結構
日本山梨實驗線超導電動懸浮列車結構示意圖[1]如圖1所示。零磁通線圈與推進線圈沿軸在軌道上均勻鋪設,而超導磁體則放置于列車下部的轉向架中。列車沿軸方向運行時,車載磁體產生的移動磁場會切割零磁通線圈,而零磁通線圈獨特的交叉連接結構使線圈上下兩回路感應出方向相反的電流,如圖2所示。

圖1 超導電動懸浮列車結構示意圖

圖2 零磁通線圈與超導磁體結構
下回路線圈對車載磁體產生向上的排斥力,上回路線圈對車載磁體產生向上的吸引力,該懸浮力會隨著列車速度增加而提高。列車靜止或低速運行時,需依靠車載輔助輪進行支撐,而當列車達到一定速度時,懸浮力大于車載重力,列車可實現懸浮。
由此可知,電動懸浮系統主要由車載磁體、零磁通線圈組成,而車載磁體與零磁通線圈之間的相對運動是產生懸浮力的關鍵。本文建立了一種室內等效模擬裝置,將零磁通線圈分為兩組分別放置于磁體兩側的對稱位置,每組零磁通線圈沿圓周方向均勻排布,電動懸浮等效方法如圖3所示。保持磁體靜止的同時使兩側零磁通線圈反向同步旋轉,即可將實際電動磁懸浮列車車載磁體的直線運動等效為零磁通線圈的旋轉運動。

圖3 電動懸浮等效方法
本文采用永磁體替換了作為場源的超導磁體,將永磁體安裝于與力傳感器連接的夾具中,零磁通線圈安裝于永磁體兩側的圓筒中,通過步進電機驅動兩側圓筒反向同步旋轉,即可實現對電動懸浮系統的等效模擬,系統運行中永磁體與零磁通線圈之間的電磁力可由力傳感器測得,圖4為電動懸浮等效模擬系統結構。

圖4 電動懸浮等效模擬系統結構
2 有限元建模及特性分析
2.1 三維有限元模型
為探究電動懸浮等效模擬系統的電磁力特性,本文建立了如圖5所示的三維有限元模型,該模型主要由永磁體、零磁通線圈以及外部的空氣域組成。由于模型中兩側零磁通線圈左右對稱分布、距離較遠,其相互影響可忽略不計,因此該模型只建立了單側的零磁通線圈做等效計算。單側零磁通線圈與永磁體之間電磁力的兩倍即為電動懸浮等效模擬系統的總電磁力。表1給出了電動懸浮等效模擬系統的具體尺寸參數。

圖5 電動懸浮等效模擬系統三維有限元模型
模型建立完成后,再通過材料設置、電路搭建、網格剖分、邊界設置、瞬態求解及后處理分析,即可計算永磁體在不同線圈轉速、懸浮高度、橫向偏移等狀態下的電磁力。
表1 電動懸浮等效模擬系統尺寸參數

Tab.1 Specifications of the EDS equivalent simulation system
2.2 浮阻特性
由于電動懸浮是依靠地面線圈感應電流與車載磁體磁場作用而產生懸浮力,因此產生懸浮力的同
時必然會產生阻礙車體向前運動的磁阻力。由安培定律可知,懸浮線圈中的豎直邊上的感應電流是產生磁阻力的主要因素。而零磁通線圈的特殊結構,使上下兩側回路豎直邊上的感應電流反向,從而令上下兩側回路磁阻力反向,最終使總磁阻力較小,這是零磁通式電動懸浮系統具有高浮阻比的原因。


(2)
就磁阻力而言,它會隨著轉速的增加先達到一個峰值,之后便會逐漸減小,這是由于磁阻力反映的是系統歐姆損耗,速度達到一定值后,線圈感應電流和電阻都保持恒定,即歐姆損耗功率不變,從而使磁阻力隨著速度的提升而下降。由此可知,浮阻比隨線圈轉速的增大而增大,因此電動懸浮系統在高速工況下具有很高的浮阻比,這也是電動懸浮在高速領域應用的一個關鍵優勢。

圖6 不同轉速時的電磁力變化曲線
2.3 自穩定性
電動懸浮系統的另一個優勢在于其無需復雜控制系統的自穩定性,當磁體與地面線圈中相對位置發生偏移時,磁體所受電磁力也會發生相應變化從而使磁體恢復到原始位置。本節將基于有限元模型,對電動懸浮等效模擬系統的自穩定性進行分析。
圖7描述了線圈轉速為4 400r/min,無橫向偏移,懸浮力及磁阻力隨懸浮高度的變化曲線。當懸浮高度為零時,由于零磁通線圈中上下兩側回路中磁通相等,使兩側回路感應電動勢抵消,此時無電磁力產生;隨著懸浮高度的增加,懸浮力呈現出先增后減的趨勢,即在一定懸浮高度變化范圍內,電動懸浮系統存在自穩定性,但若磁體的懸浮高度越過這一范圍,電動懸浮系統穩定性就會下降;而磁阻力隨著懸浮高度的增加一直提升。

圖7 不同懸浮高度時的電磁力變化曲線
圖8描述了線圈轉速為4 400r/min,懸浮高度20mm,懸浮力、導向力、磁阻力隨橫向偏移的變化曲線。當橫向偏移為零時,磁體所受兩側零磁通線圈的排斥力等大反向,體現為導向力為零;隨著橫向偏移的增加,導向力逐漸增大,充分體現了電動懸浮系統的橫向自穩定性。由圖8可知,隨著橫向偏移的增加,懸浮力和磁阻力也在不斷增大。
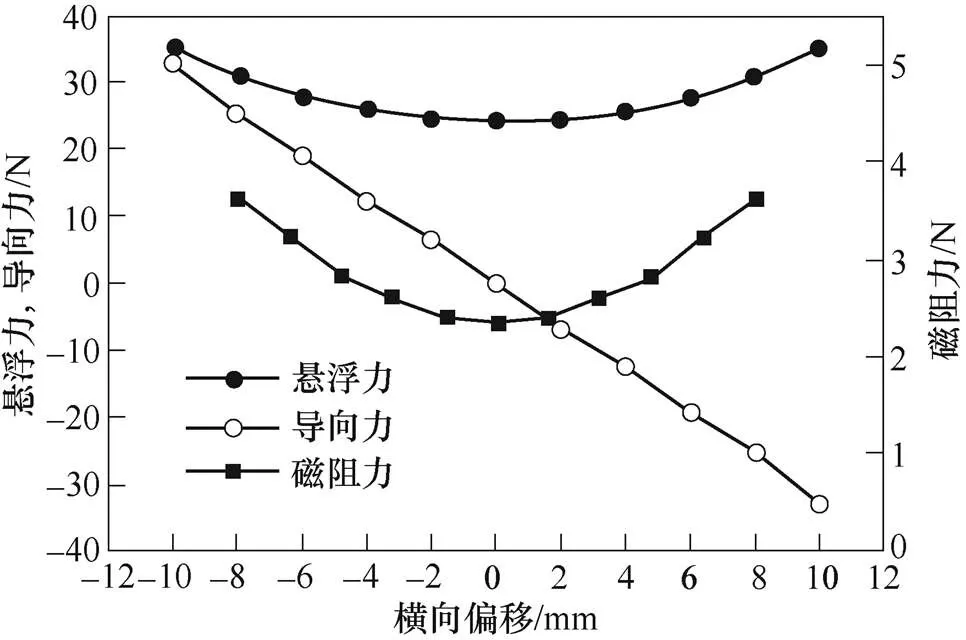
圖8 不同橫向偏移時的電磁力變化曲線
因此,在設計電動懸浮系統時,應合理設計懸浮高度和橫向偏移的變化區間,在滿足懸浮載荷要求的前提下,需要保證系統的穩定性,且盡量降低系統磁阻力以提高運行效率。
2.4 懸浮力波動性
圖9描述了線圈轉速4 400r/min,懸浮高度20mm,無橫向偏移,不同線圈極距下的懸浮力隨時間變化曲線。可以看出,懸浮力隨時間周期性波動變化,其變化周期為

所以,在具有足夠安裝尺寸的條件下,減小線圈極距可提升電動懸浮系統的懸浮力及其穩定性。

圖9 不同線圈極距下的懸浮力隨時間變化曲線
3 樣機實驗與結果
為了對有限元模型的有效性和可靠性進行驗證,根據表1參數研制了電動懸浮等效模擬系統樣機,對懸浮力進行了測試,并實現了永磁體的懸浮。
3.1 樣機實物
圖10為研制的電動懸浮等效模擬系統,系統整機主要由永磁體、零磁通線圈、磁體夾具、線圈安裝圓筒、步進電機、力傳感器、工業鋁型材框架等組成。通過該系統可對不同工況下的電磁力進行模擬和測試。

圖10 電動懸浮等效模擬系統
3.2 測試結果與懸浮效果
圖11展示了在永磁體懸浮高度分別為11mm、16mm、21mm,永磁體與零磁通線圈之間的氣隙分別為10mm、15mm的條件下,懸浮力隨線圈轉速變化的仿真與實驗對比曲線。由圖可知,隨著線圈轉速的增加,懸浮力逐漸增大,這與2.2節中的仿真分析一致;而氣隙的減小會導致零磁通線圈處的磁場增加,從而使懸浮力提升。由仿真計算曲線和實驗測試曲線對比可知,在轉速較低時,仿真計算值和實驗測試值吻合較好;但在高轉速的情況下,實驗測試值均大于仿真計算值,這是由于隨著轉速增加線圈所受離心力加大,旋轉圓筒變形使線圈與磁體之間的氣隙更小,從而導致懸浮力的實測值大于仿真值;測試結果驗證了計算模型的準確性。

圖11 懸浮力的實驗測試與仿真計算對比
當永磁體起浮高度為20mm,永磁體與零磁通線圈氣隙為15mm,線圈轉速為390r/min時,可實現永磁體的懸浮,如圖12所示。

圖12 永磁體懸浮
由上述仿真及實驗結果可知,該實驗樣機的懸浮力還遠不能滿足實際應用中電動磁懸浮列車承載力的需求,但基于上述設計,實驗樣機的懸浮力已能夠平衡永磁體的自重,實現永磁體的懸浮,再現了零磁通電動磁懸浮的物理原理。同時,實驗與仿真結果吻合較好,證實了有限元計算模型的準確性。基于該有限元計算模型,通過變化零磁通線圈的幾何尺寸,將永磁體替換為磁場更強的超導磁體,可以實現對實際應用的超導電動磁懸浮列車的性能模擬。
4 結論
本文提出了一種零磁通式電動懸浮等效模擬系統,將車載磁體的直線運動等效為零磁通線圈的旋轉運動,可在室內完成電動懸浮系統的模擬,結合有限元仿真與實驗測試對系統的電磁力特性進行研究分析。建立三維有限元仿真模型,分析了懸浮力、導向力、磁阻力隨線圈轉速、懸浮高度、橫向偏移、線圈極距的變化規律。研制樣機并搭建實驗平臺,通過對懸浮力的測試與對比分析,驗證了有限元模型的準確性。研究結果表明,零磁通電動懸浮系統在高速領域具有高的浮阻比,在一定偏移范圍內具有較好的穩定性,線圈極距的減小可有效地提高懸浮力并減小其波動幅值。最終,通過該等效模擬系統實現了永磁體的懸浮。
[1] 魏慶朝, 孔永健. 磁懸浮鐵路系統與技術[M]. 北京:中國科學技術出版社, 2003.
[2] 程建峰, 蘇曉峰. 磁懸浮列車的發展及應用[J]. 鐵道車輛, 2003, 41(11): 14-17.
Cheng Jianfeng, Su Xiaofeng. Development and application of magnetic levitation trains[J]. Rolling Stock, 2003, 41(11): 14-17.
[3] 王家素, 王素玉. 超導技術應用[M]. 成都: 成都科技大學出版社, 1995.
[4] Lee H W, Kim K C, Lee J. Review of Maglev train technologies[J]. IEEE Transactions on Magnetics, 2006, 42(7): 1917-1925.
[5] 溫旭輝, 徐善綱. 電動式磁懸浮系統分析綜述[J]. 電工電能新技術, 1995, 14(3): 7-11.
Wen Xuhui, Xu Shangang. Analysis of electro- dynamic levitation systems[J]. Advanced Technology of Electrical Engineering and Energy, 1995, 14(3): 7-11.
[6] Powell J R, Danby G T. High speed transport by magnetically suspended trains[C]//ASME Winter Annual Meeting, New York, 1966: 66-WA/RR-5.
[7] Guderjahn C A, Wipf S L, Fink H J, et al. Magnetic suspension and guidance for high speed rockets by superconducting magnets[J]. Journal of Applied Physics, 1969, 40(5): 2133-2140.
[8] Davis L C, Borcherts R H. Superconducting paddle wheels, screws, and other propulsion units for high- speed ground transportation[J]. Journal of Applied Physics, 1973, 44(7): 3294-3299.
[9] Kyotani Y. Recent progress by JNR on Maglev[J]. IEEE Transactions on Magnetics, 1988, 24(2): 804- 807.
[10] Nakashima H. The superconducting magnet for the Maglev transport system[J]. IEEE Transactions on Magnetics, 1994, 30(4): 1572-1578.
[11] Rote D M, Cai Yigang. Review of dynamic stability of repulsive-force Maglev suspension systems[J]. IEEE Transactions on Magnetics, 2002, 38(2): 1383- 1390.
[12] 秦偉, 范瑜, 徐洪澤, 等. 高溫超導運動磁場電磁Halbach初級結構直線感應磁懸浮電機[J]. 電工技術學報, 2018, 33(23): 5427-5434.
Qin Wei, Fan Yu, Xu Hongze, et al. A linear induction Maglev motor with HTS traveling magnetic electromagnetic Halbach array[J]. Transactions of China Electrotechnical Society, 2018, 33(23): 5427- 5434.
[13] Ohashi S, Ueshima T. Control method of the semi- active damper coil system in the superconducting magnetically levitated bogie against vertical and pitching oscillation[J]. IEEE Transactions on Magnetics, 2012, 48(11): 4542-4545.
[14] Ono M, Koga S, Ohtsuki H. Japan’s superconducting Maglev train[J]. IEEE Instrumentation and Measure- ment Magazine, 2002, 5(1): 9-15.
[15] Kim M, Jeong J H, Lim J, et al. Design and control of levitation and guidance systems for a semi-high-speed Maglev train[J]. Journal of Electrical Engineering and Technology, 2017, 12(1): 117-125.
[16] 萬尚軍, 錢金根, 倪光正, 等. 電動懸浮型磁懸浮列車懸浮與導向技術剖析[J]. 中國電機工程學報, 2000, 20(9): 22-25, 31.
Wan Shangjun, Qian Jingen, Ni Guangzheng, et al. Study of the levitation and guidance technology for electrodynamic suspension Maglev vehicle[J]. Pro- ceedings of the CSEE, 2000, 20(9): 22-25, 31.
[17] 李春生, 杜玉梅, 夏平疇, 等. 直線型Halbach磁體和導體板構成的電動式磁懸浮系統的分析及實驗[J]. 電工技術學報, 2009, 24(1): 18-22.
Li Chunsheng, Du Yumei, Xia Pingchou, et al. Analysis and experimental testing of EDS Maglev with linear Halbach and conducting sheet[J]. Transa- ctions of China Electrotechnical Society, 2009, 24(1): 18-22.
[18] 朱熙, 范瑜, 李碩, 等. 旋轉磁場電動式磁懸浮裝置的狀態方程與懸浮力控制[J]. 電工技術學報, 2011, 26(12): 1-6.
Zhu Xi, Fan Yu, Li Shuo, et al. State equations and lift force control of rotating field electrodynamic levitation device[J]. Transactions of China Electro- technical Society, 2011, 26(12): 1-6.
[19] 王志濤, 蔡堯, 龔天勇, 等. 基于場-路-運動耦合模型的超導電動懸浮列車特性研究[J]. 中國電機工程學報, 2019, 39(4): 1162-1171.
Wang Zhitao, Cai Yao, Gong Tianyong, et al. Characteristic studies of the superconducting electro- dynamic suspension train with a field-circuit-motion coupled model[J]. Proceedings of the CSEE, 2019, 39(4): 1162-1171.
[20] 陳殷, 張昆侖. 板式雙邊永磁電動懸浮電磁力計算[J]. 電工技術學報, 2016, 31(24): 150-156.
Chen Yin, Zhang Kunlun. Calculation of electro- magnetic force of plate type null double side permanent magnet electrodynamic suspension[J]. Transactions of China Electrotechnical Society, 2016, 31(24): 150-156.
Characteristic Analysis and Experiment of the Equivalent Simulation System for Null-Flux Electrodynamic Suspension
12111
(1. State Key Laboratory of Traction Power Southwest Jiaotong University Chengdu 610031 China 2. School of Electrical Engineering Southwest Jiaotong University Chengdu 610031 China)
An equivalent null-flux electrodynamic suspension (EDS) simulation system was proposed, and its working principle and structure were described. The electromagnetic force characteristics of the system were analyzed by finite element simulation and experiment. A 3-D finite element model of the system was established, and then the effects of the coil velocity, the vertical and transverse displacement of the magnet, and the coil pitch on system performance were analyzed. A laboratory prototype was developed and tested. The variation of levitation force under different working conditions was tested. Comparisons between simulation and experiment have verified the accuracy and reliability of the finite element model. In addition, the laboratory prototype can realize the levitation of the magnet, which can provide theoretical support for the application and design of the null-flux EDS in rail transit.
Null-flux electrodynamic suspension, equivalent simulation, finite element analysis, electromagnetic force characteristics
U237
10.19595/j.cnki.1000-6753.tces.200056
國家自然科學基金項目(52072318, 51722706)和四川省科技廳項目(2020ZYD010)資助。
2020-01-09
2020-03-03
王一宇 男,1996年生,碩士研究生,研究方向為磁懸浮理論及應用。E-mail: wangyiyu_swjtu@163.com
馬光同 男,1982年生,研究員,博士生導師,研究方向為磁懸浮理論及應用。E-mail: gtma@swjtu.edu.cn(通信作者)
(編輯 崔文靜)
猜你喜歡
艦船科學技術(2022年20期)2022-11-28 08:19:18
數學物理學報(2022年4期)2022-08-22 04:09:28
減速頂與調速技術(2020年4期)2020-11-22 07:20:26
上海節能(2020年3期)2020-04-13 13:16:16
石油化工建設(2019年6期)2020-01-16 08:03:42
天津醫科大學學報(2019年6期)2019-08-13 07:04:32
鍛壓裝備與制造技術(2016年3期)2016-06-05 09:36:08
機械工程師(2015年10期)2015-02-02 01:14:03
機電產品開發與創新(2014年4期)2014-03-11 16:42:24
上海金屬(2013年4期)2013-12-20 07:57:18