雙自由度半球型錐齒輪設計與接觸分析
2021-04-29 13:23:38王佰超許鎮全王德民路先亭
長春理工大學學報(自然科學版) 2021年2期
王佰超,許鎮全,王德民,路先亭
(長春理工大學 機電工程學院,長春 130022)
傳統的齒輪為單自由度傳動,如圓柱齒輪、圓錐齒輪等都只能傳遞軸線相對位置不變的回轉運動,但不能滿足新興領域對多傳動自由度的要求,如機器人、仿生和矢量推進技術領域[1],多自由度齒輪由此發展。
多自由度齒輪也稱為球齒輪,現有漸開線環形齒球齒輪具有2運動自由度[2],克服Trallfa球齒輪具有傳動原理誤差和加工難度大的缺陷,但無法實現相交軸間的回轉運動傳遞[3]。而另一種雙自由度半球型錐齒輪[4]結構,可實現變相交軸夾角的回轉運動傳遞,同樣具備2運動自由度,該球齒輪副避免由圓錐齒輪組合機構實現雙自由度所帶來的復雜結構設計和龐大的體積,且彌補漸開線環形齒球齒輪無法繞其極軸進行回轉運動傳遞的缺陷,可用于機器人手腕、仿生關節等機構。
對于半球型錐齒輪的研究,目前只是對其結構設計,未對其嚙合原理進行研究,以及缺少齒面數學模型。在漸開線環形齒球齒輪齒面形成原理基礎上,基于雙參數齒面包絡原理,提出了一種半球型錐齒輪的設計方法,完善多自由度球齒輪副的二維回轉運動傳遞形式。
1 半球型錐齒輪嚙合原理
半球型錐齒輪副間的嚙合傳動相當于一對節球間的純滾動。如圖1所示,半球型錐齒輪副實現任意相交軸交角?的回轉運動傳遞,其中0
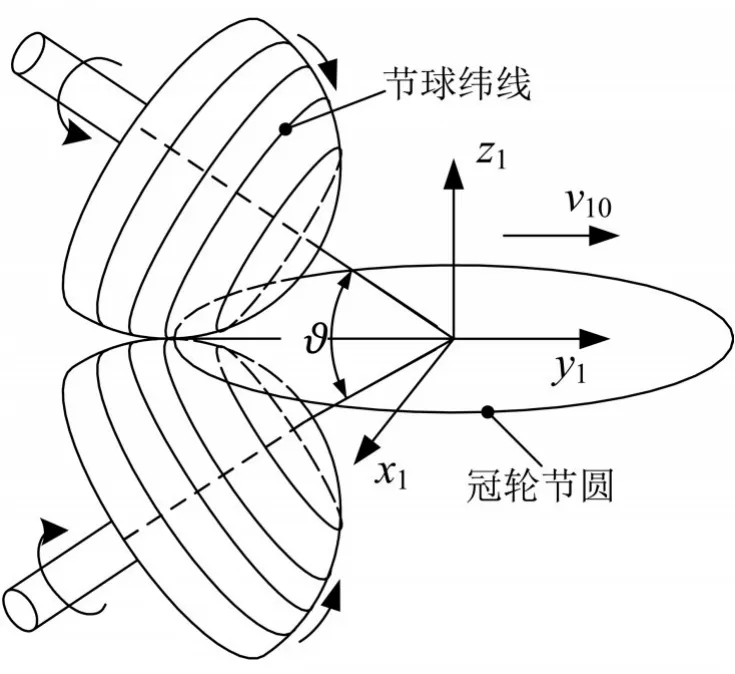
圖1 半球型錐齒輪副傳動
考慮到圓錐齒輪的齒面可由冠輪齒面包絡生成[5],半球型錐齒輪齒面可由具有雙運動參數的冠輪與齒輪的共軛運動中生成。冠輪節圓平面與節球相切,節圓中心為回轉軸與節圓平面的交點。在任意軸交角位置,半球型錐齒輪與冠輪的嚙合相當于厚度為無限小的圓錐齒輪與冠輪間的傳動。
由于半球型錐齒輪副在一定軸交角位置下的嚙合等價于一對厚度無限小的圓錐齒輪傳動,即半球型錐齒輪的端面齒廓與圓錐齒輪相同,故一對半球型錐齒輪副在一定軸交角下的當量齒輪為錐齒輪。根據上述分析,半球型錐齒輪副的嚙合在端面內進行的,因此其正確嚙合條件為在各軸交角?下,該齒輪的端面模數與壓力角分別相同,即:

式中,?1和?2為半球型錐齒輪副端面齒廓節錐角,且?1+?2=?。由于半球型錐齒輪與圓錐齒輪的端面齒廓相同,則在各軸交角下的重合度與其當量圓錐齒輪相同。
2 冠輪齒面方程
冠輪為圓錐齒輪在節錐角為π/2時的特殊情況,此時節錐表面為圓平面。將冠輪作為產形齒條,在共軛運動中包絡出半球型錐齒輪的工作齒面。采用坐標變換方法[6]推導出冠輪的齒面方程。如圖2所示,坐標系原點均在節錐平面中心,z3軸垂直節錐平面,輪齒兩齒側表面關于平面y3O3z3對稱,y1,y2軸過節點且位于齒側表面。

圖2 冠輪齒廓
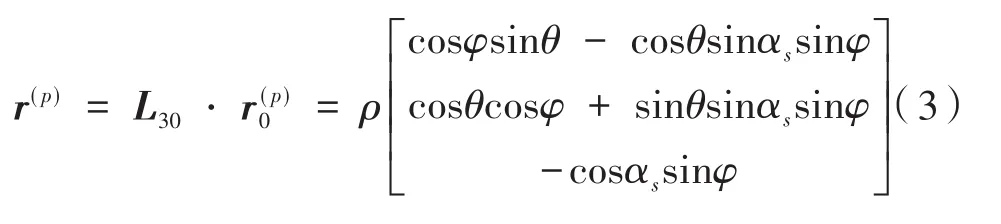
在坐標系S0(x0,y0,z0)中,冠輪齒面任一點p表示為[0,ρ,0]T,其中ρ為p點矢量長度。坐標系S0到S3的變換矩陣為:
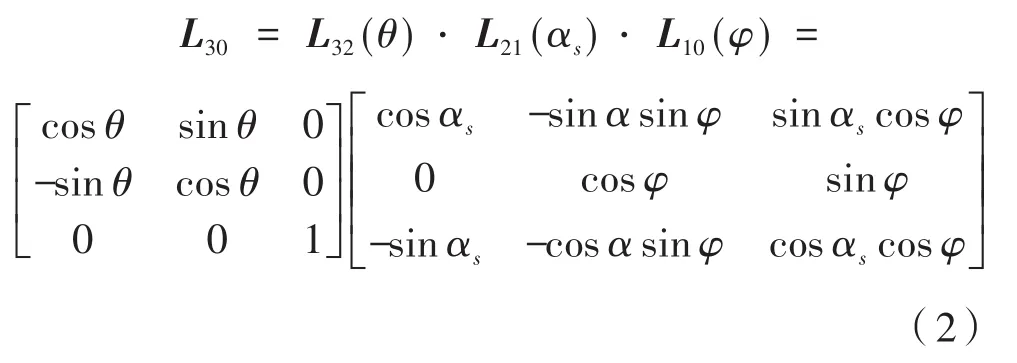
式中,L30為坐標系S0到S3的變換矩陣;θp為節圓齒厚,且θ=θp/2。根據上式,冠輪的齒面方程為:
3 半球型錐齒輪齒面方程
圖3為冠輪與半球型錐齒輪的共軛運動模型,冠輪工作齒面作為產形齒條包絡出半球型錐齒輪齒面[7]。垂直冠輪節圓平面的z1t軸在初始位置與半球型錐齒輪節球的z20軸重合。冠輪從初始位置以速度V10移動,同時以角速度ω(1)順時針轉動φ1,則半球型錐齒輪分別以角速度ω(3)和ω(2)轉動β和i?φ1。

圖3 冠輪與半球型錐齒輪運動模型
為了描述上述運動過程,建立輔助坐標系S1t(x1t,y1t,z1t)和S2t。固定系S20繞x20軸轉動β至坐標系S2t,再繞z2t轉動i?φ1至坐標系S2t;坐標系S1t隨同節圓平面移動,再繞z1t軸轉動φ1至坐標系S1。各坐標系之間的變換矩陣為:
式中,M201為從坐標系S1到S20的變換矩陣,M220與之同理。
根據雙參數包絡原理,采用運動法推導冠輪與半球型錐齒輪的嚙合方程[8]。在固定系S20下,冠輪齒面與半球型錐齒輪齒面接觸點處相對速度為:


將式(3)、式(4)、式(6)和式(7)代入嚙合方程中,用Mathematica符號計算軟件得出:

因此,半球型錐齒輪的齒面方程為:
根據冠輪與半球型錐齒輪的共軛運動分析,冠輪作為產形齒條刀具以速度V10移動的同時,又以角速度ω(1)作切削運動,所加工的半球型錐齒輪分別以角速度ω(3)和ω(2)作進給運動。因此,加工機床需具有兩條獨立運動鏈,同時ω(3)是關于運動參數β的函數變量,導致運動鏈復雜且在一般機床上加工困難,甚至無法加工,可采用多軸數控機床進行加工。
4 半球型錐齒輪有限元分析
上述由冠輪作為產形齒條所包絡出的半球型錐齒輪齒面大小由冠輪齒數與節球半徑決定,選取冠輪的齒數為12,傳動比i=1,壓力角為20°。半球型錐齒輪的節球半徑r=21。根據上述半球型錐齒輪齒面方程,采用Matlab編程仿真出半球型錐齒輪的完整齒廓如圖4所示。

圖4 半球型錐齒輪完整齒廓
將半球型錐齒輪齒面坐標數據保存在記事本中,并修改為后綴為*.ibl文件格式,導入至ProE中[9]。利用邊界混合命令將曲線族分別形成左右手邊輪齒表面,再通過相關曲面編輯將齒面合并實體化生成輪齒。最終得到三維實體模型,如圖5所示。

圖5 半球型錐齒輪副
將半球型錐齒輪副實體模型導入至ANSYS Workbench的瞬態動力學模塊中,選擇材料的彈性模量E=2×105MPa,泊松比μ=0.3。為了提高計算精度和效率,輪齒參與嚙合部分網格劃分密集,非嚙合區域則較為稀疏[10]。根據輪齒實際接觸情況設置為摩擦接觸,摩擦系數設為0.1,并對齒輪副的主動輪和從動輪的回轉軸分別施加大小為M=100 N?m的力矩和2 rad/s的角速度,其中在相交軸交角分別為20°和60°下的應力云圖如圖6-圖7所示。

圖6 ?=20°時半球型錐齒輪應力圖
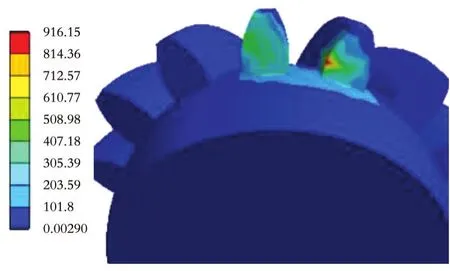
圖7 ?=60°時半球型錐齒輪應力圖
在各個相交軸夾角下,最大齒面接觸應力與齒根彎曲應力仿真結果如表1所示。
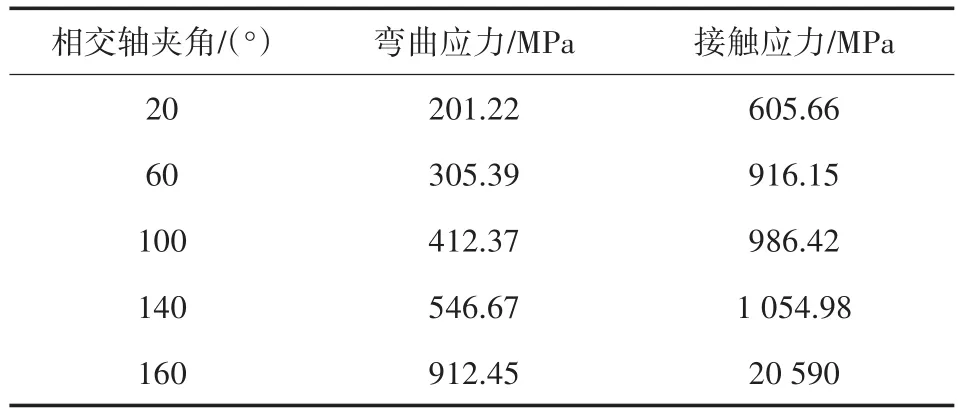
表1 齒面接觸應力與齒根彎曲應力
根據齒輪應力仿真結果圖分析可知,半球型錐齒輪副為點接觸。當相交軸夾角逐漸增大時,由于接觸點向齒頂移動和端面齒廓模數減少,最大接觸應力與齒根彎曲應力逐漸增大。當軸交角為160°時,由于輪齒厚度過小,接觸應力和彎曲應力發生突變。
5 結論
(1)根據對半球型錐齒輪副的傳動原理分析,將冠輪作為產形齒條,推導出半球型錐齒輪齒面方程,并利用Matlab和Pro/E建立齒輪實體模型,驗證了齒面方程正確性。
(2)半球型錐齒輪副為點接觸。當相交軸夾角增大時,由于接觸點向齒頂移動和端面齒廓模數減少,輪齒接觸應力與齒根彎曲應力增大。當軸夾角接近180°時,應力發生突變。