基于多通道表面肌電信號的手勢識別方法研究
2021-04-29 13:23:52田浪博趙耀邱月胡命嘉宮玉琳
長春理工大學學報(自然科學版) 2021年2期
田浪博,趙耀,邱月,胡命嘉,宮玉琳
(長春理工大學 電子信息工程學院,長春 130022)
手在人們的日常生產生活中扮演著不可或缺的角色,是人體與外界交流的媒介之一,因此上肢殘缺喪失了日常生活的能力,降低了生活的幸福感。得益于人工智能、深度學習等技術的迅猛發展,智能假肢開始出現在殘疾人群的日常生活中,有效改善了肢體殘疾人群的生活質量。表面肌電信號(Surface Electromyography Signal,sEMG)能有效地反映出人體在動作的生理變化,在智能假肢控制領域意義重大[1]。
表面肌電(sEMG)信號是骨骼肌收縮時,在皮膚表面利用肌電傳感器以無創的方式記錄下來的生物電信號,其中蘊含著豐富的與神經肌肉活動、運動意圖相關的信息,成為控制假手的理想信號源[2-3]。利用特征提取和模式識別技術,對不同手勢動作過程中產生的肌電信號實現自動識別、分類,這正是基于sEMG實現智能假手控制的關鍵所在[4]。
目前,基于表面肌電信號的手臂動作識別主要分為上肢大幅度動作模式和手指精細動作兩種。文獻[5]對小臂旋前/后、腕部彎曲/伸展等8種上肢大幅度動作模式進行分類,其正確識別率達到73%~97%。文獻[6]對8通道的sEMG提取時域特征,再結合粒子群(PSO)優化算法和蟻群(ACO)優化算法,利用SVM、LDA以及樸素貝葉斯(NB)搭建手勢分類模型,其準確率最高達到了95%。
根據現階段研究現狀,本文提出一種基于多通道表面肌電信號的手勢識別研究方案。利用優化后的支持向量機對多種手指動作進行分類,搭建手勢分類識別模型,為后續智能假肢的實時控制奠定基礎。
1 數據庫簡介與信號預處理
1.1 Ninapro數據庫簡介
以往文獻在獲取sEMG數據時,多為自行設定手勢動作,采用不同種肌電電極獲取動作時產生的表面肌電信號,對手勢動作以及信號采集缺少規范性的設定,本文截取了Ninapro數據庫的部分數據進行實驗分析。NinaPro數據庫[7]是一個基于多種稀疏多通道肌電信號的手勢識別的標準數據集,其主旨是為科研人員提供實驗數據,方便實驗的進行。
本文選用了數據庫中DB5數據的部分進行實驗,具體手勢動作如圖1所示。DB5數據集是由雙MYO臂環完成信號采集,單個臂環包含有8個通道,其采樣頻率為200 Hz。數據集中包含有10個健全測試者右利手的52種手勢動作,每種動作重復6次且每次持續5 s,為降低采集過程中測試者的肌肉疲勞程度,每次動作后休息3 s。
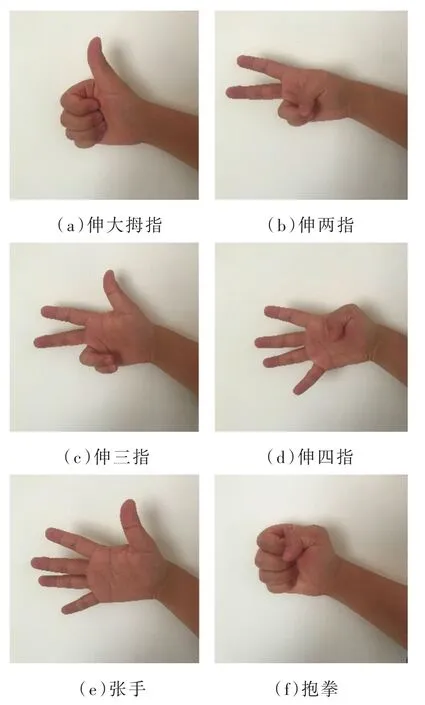
圖1 Ninapro數據庫部分動作示意圖
1.2 肌電信號的濾波處理
sEMG是一種及其微弱的信號,易受到電路以及外界環境的干擾,其中以工頻干擾、基線漂移等干擾最為嚴重[8]。其頻譜范圍在0~1 000 Hz之間且主要能量集中在20~200 Hz之間,由于MYO臂環系統已完成50 Hz的工頻率波,因此再對信號進行截止頻率為20 Hz的巴特沃斯高通濾波。
1.3 活動段檢測
sEMG中的一次完整動作包括有活動段信號和靜息段信號兩個部分。活動段信號為肌肉運動時產生的生理電信號,平均能量高,而靜息段信號為肢體放松時產生的電信號,其中包含有肢體的噪聲信號,且平均能量低[9]。為降低噪聲對實驗結果的影響以及模型的數據處理量,本文選用移動平均能量法與閾值法進行活動段檢測,具體步驟如下:
(1)先計算各通道sEMG信號序列St(i)的差分平方和的均值,得到信號瞬時平均能量Saver(i),其中N為MYO臂環的通道總數,i為當前信號序列的標號,t的取值范圍為1≤t≤N,如式(1)所示:

(2)取固定窗口長為L=128的移動窗對瞬時能量按照式(2)依次計算窗長內的能量均值:

(3)設置合適的能量幅度閾值YZ對經移動平均后的能量均值進行判別,如式(3)所示,保留大于閾值的信號點,將低于閾值的信號點置零,依此確定活動段的起始點與終止點,同時設定活動段長度閾值TH,將小于TH的活動段作為判斷錯誤舍棄。

2 特征提取
特征提取在手勢識別中是不可或缺的一部分,能更大程度上展現不同手勢動作間的區別,提高動作的識別率。目前常用的特征種類包含有時域、頻域、時頻域特征、非線性分析以及參數模型五大類[10]。
2.1 時域特征
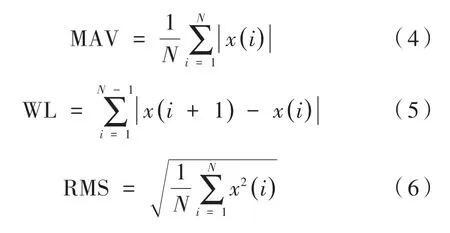
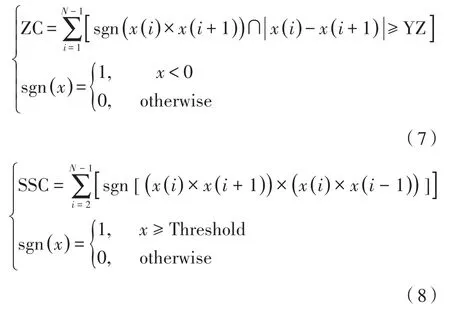
本文選取了時域特征中的絕對均值(MAV)、波形長度(WL)、均方根(RMS)、過零點數(ZC)、斜率符號變化(SSC)以及小波包系數能量作為特征參數。其中5種時域特征如式(4)-式(8)所示:
2.2 時頻域特征
sEMG中蘊含的動作特征信息是由原始信號和小波包基函數共同決定的。不同的小波包基的性質各不相同,反映信號特征的能力也不相同。以往研究表明,Daubechies系列基函數與運動單元動作電位的形狀最為相似[11],故本文選擇Db2作為小波包基函數,提取小波包系數的能量作為時頻域特征,為降低數據處理量,本文對肌電信號進行2層分解。小波包系數的計算如下:
其中,h(m-2l)和g(m-2l)是尺度級數p下的兩組函數;p代表級數。
3 分類模型設計
3.1 SVM原理簡介
SVM的基本理論是通過尋找最優分類面來實現對未知樣本數據的分類。即在特征空間中尋找一個最優分類超平面,使兩類樣本特征的幾何間隔最大。在線性可分的情況下,將最優分類超平面ω×xi+b=0歸一化后,對樣本集數據(xi,yi),i=1,2,…,n,x∈Rd,y?[-1,+1]進行分類為兩樣本數據到超平面的幾何距離。分類間隔最大就等價于最小化‖ω‖,因此得到一個帶約束的優化問題:
其中,ω為最優超平面的法向量;b為閾值;b∈Rd。
對于SVM的線性不可分問題,應當引入松弛變量φi≥0(i=1,2,…,n)和懲罰函數C,則超平面的求解公式為:

映射核函數選用高斯徑向基核函數:

其中,σ為核函數參數。
3.2 Grid Search-SVM分類器簡介
3.2.1 Grid Search-SVM原理
影響SVM分類器性能的關鍵參數是懲罰函數C和核函數參數g,其中C表示模型對誤差的容忍度[12]。C值太大容易導致過擬合的現象,使得測試集的數據分類效果不佳;C值太小容易導致欠擬合,模型不能有效捕捉樣本的數據特征,泛化能力變差。g是選擇RBF函數作為kernel后,該函數自帶的一個參數,隱含地決定了數據映射到新的特征空間后的分布,g越大,支持向量越少,g值越小,支持向量越多。g值過大過小,表明原始樣本被映射至并不適用的高維空間,無法建立較優的分類模型。
Grid Search是用在Libsvm中的參數搜索方法,在C和g組成的二維參數矩陣中,依次搜索網格內所有點進行取值,對于取定的C和g利用K-CV方法取得在此組C和g下訓練集驗證分類準確率,最終取得使訓練集驗證分類準確率最高的那組C和g作為最佳參數。使用Grid Search算法可以達到全局最優,且C和g相互獨立[13-14]。
3.2.2 Grid Search-SVM模型建立
在模型的建立過程中,導入提取的特征參數,在進行歸一化處理后,引入RBF核函數,將特征參數映射到高維空間,再進行SVM模型訓練,參數尋優以及模型驗證,整個版型的預測模型如圖2所示。
(1)選定訓練集與測試集,對數據集進行劃分。
(2)樣本數據預處理:為避免各個樣本因子之間量級的差異,減少樣本之間的相互影響,同時保證程序運行收斂加快,需對樣本因子進行歸一化處理。
其中,x、min(x)、max(x)分別是原始樣本數據及其最小值、最大值;max(y)、min(y)分別為歸一化后樣本的最大值與最小值。
(3)引入徑向基核函數RBF,通過調整g參數實現樣本從低維空間到高維空間的映射,從而實現線性可分。

(4)使用二度Grid Search算法進行SVM模型訓練及C和g參數尋優。粗略搜索階段:定義初始網格,設置大步距,獲得局部最優參數區間;精細搜索階段:以最優參數組為搜索中心,設置小步距,不斷擴大搜索范圍,逐步跳出局部最優,獲得全局最優解,從而實現分類效果最優。
4 實驗結果與分析
4.1 信號濾波結果
由1.2節分析中,在已完成50 Hz工頻陷波的基礎上,對肌電信號進行高通濾波,濾除20 Hz以下部分。圖3為原始信號的時域圖和已完成濾波后信號的時域圖,圖4為原始信號的頻譜圖和已完成濾波后信號的頻譜圖。由圖3、圖4可知,通過高通濾波能有效地濾除部分噪聲,對后續動作的高效識別奠定了基礎。
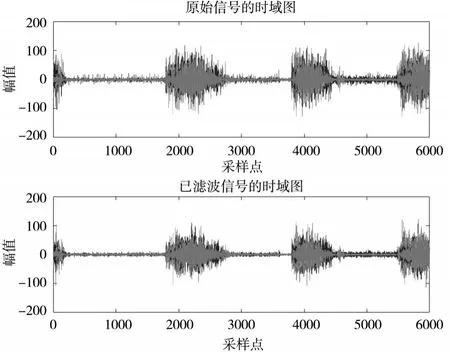
圖3 濾波前后信號時域圖
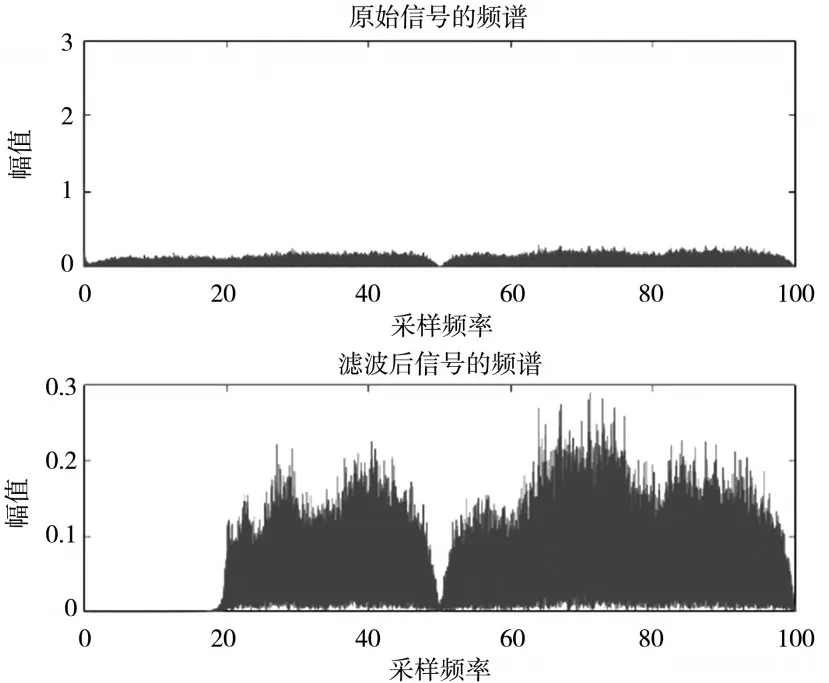
圖4 濾波前后信號頻譜示意圖
4.2 活動段檢測結果
根據1.3節所述原理,通過設置能量幅度閾值YZ,舍棄部分由噪聲影響而誤判的動作活動段,再通過活動段長度閾值TH將由肢體抖動而誤判的活動段濾除,進一步提高手勢分類的正確率。圖5、圖6為取閾值前后動作段的能量幅度圖。
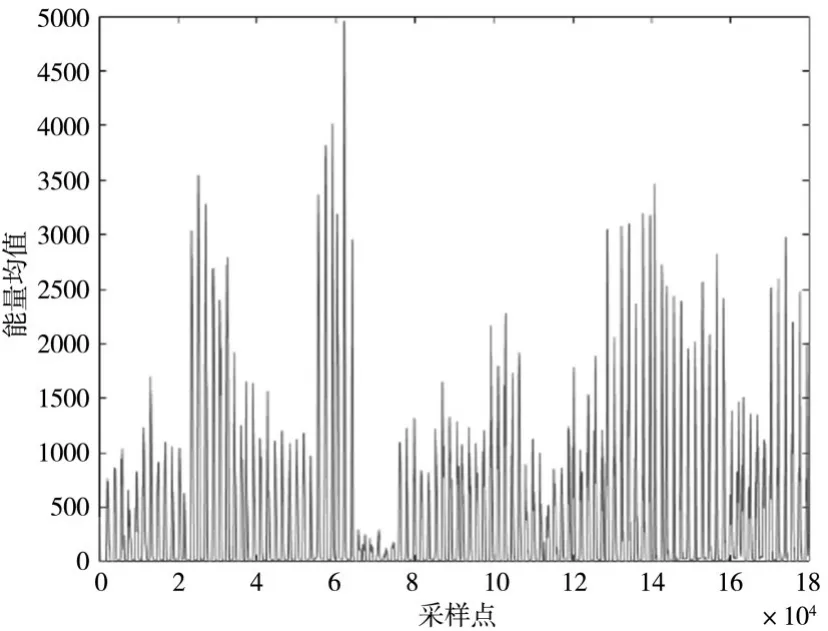
圖5 信號能量均值幅度圖
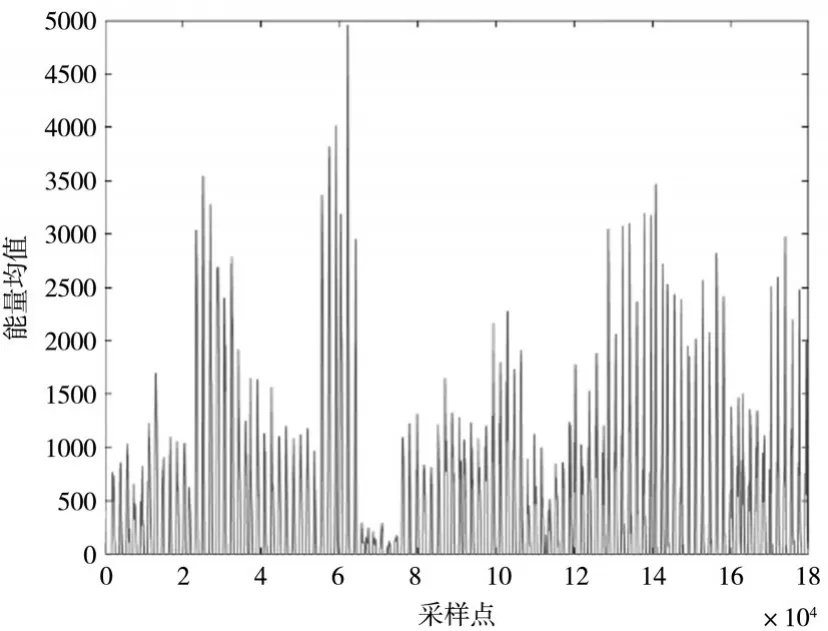
圖6 取閾值后能量均值幅度圖
4.3 分類模型實驗結果
在經Grid Search對SVM優化的過程中,本文具體進行以下操作:
(1)首先設定參數C和g的初始網格搜索范圍及其初始步長。其中,C和g的初始網格搜索范圍為[2-10,210],初始步長設定為4,通過交叉驗證方法獲得小范圍最優參數。
(2)在初始小范圍的最優參數中,再進行精確網格搜索,其中C的網格搜索范圍為[2-2,24],g的網格搜索范圍為[2-4,24],搜索步長設為0.02。
(3)將最終得到最優C和g導入到SVM的參數組,最終建立最優的Grid Search-SVM動作分類模型。
如圖7所示,當訓練數據占比為66.7%,是否經過優化,動作分類模型的實驗結果。在SVM分類器未經優化時,準確率僅為73.61%;在通過Grid Search對SVM分類器優化后,準確率達到了90%。
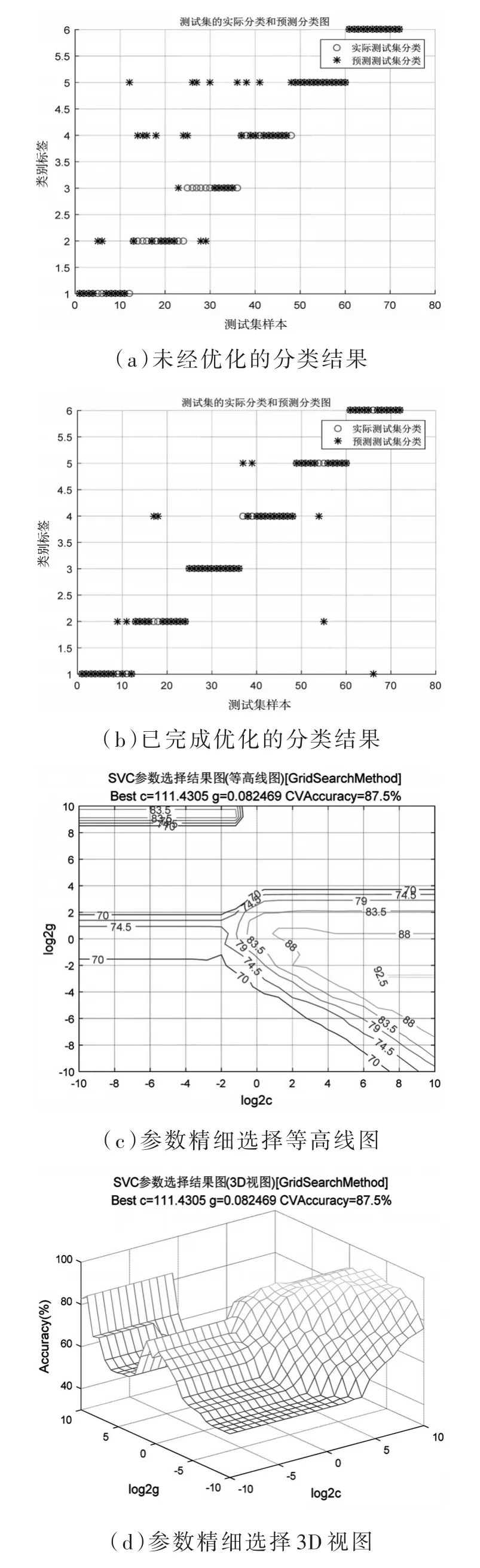
圖7 分類模型試驗結果
如圖8所示為當訓練數據占比為88.3%,是否完成優化,動作分類模型的實驗結果。在SVM分類器未經優化時,準確率為77.78%;在Grid Search對SVM分類器完成參數尋優后,優化后的分類模型準確率達到了97.22%。
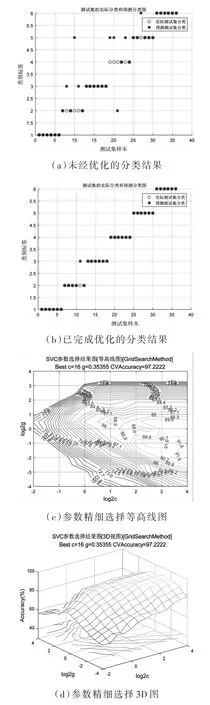
圖8 分類模型試驗結果
由圖7、圖8可知,未經優化時,SVM分類器的平均識別率為72.24%,在Grid Search對SVM完成優化后,分類模型的平均識別率達到了93.61%。由此可見Grid Search能對SVM分類器有較好的優化作用。優化后的動作分類模型達到了實驗的標準,也為后續實時控制假肢提供了實驗經驗。
5 討論
從上述研究結果總結發現,SVM作為分類器能有效的對各種動作進行分類,但分類效果不甚理想。經Grid Search對SVM分類器進行參數尋優后,分類器能有效的區分各種動作。但在實驗過程中,實驗處理時間較長,未能達到實時控制假肢動作的要求,需要在后續實驗過程進行有效解決。
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
數學小靈通(1-2年級)(2021年4期)2021-06-09 06:25:56
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化·七年級數學人教版(2019年4期)2019-05-20 10:06:32
中學生數理化·七年級數學人教版(2018年6期)2018-06-26 08:36:06
小學生作文(低年級適用)(2018年3期)2018-04-17 00:58:35
初中生世界·七年級(2017年9期)2017-10-13 22:27:46
少年博覽·小學低年級(2017年4期)2017-06-09 16:22:28