一種雜波分類輔助的近海岸模糊雜波抑制方法
2021-04-30 02:16:14段崇棣韓超壘楊志偉張慶君
西安電子科技大學學報 2021年2期
段崇棣,韓超壘,楊志偉,張慶君
(1.北京理工大學 信息與電子學院,北京 100081;2.西安空間無線電技術研究所,陜西 西安 710100;3.空間微波技術重點實驗室,陜西 西安 710000;4.西安電子科技大學 雷達信號處理國家重點實驗室,陜西 西安 710071;5.中國空間技術研究院,北京 100094)
隨著對海觀測任務日益復雜,能夠在提供靜止場景高分辨圖像的同時,完成對近海地面運動目標的檢測及測速定位的合成孔徑雷達地/海面動目標指示(SAR Ground/Marine Moving Target Indication,SAR-G/MMTI)技術備受關注[1-2]。多通道合成孔徑雷達系統綜合利用在空間上分布的多個接收通道提高慢速運動目標的檢測能力,其無模糊主瓣雜波抑制方法已經得到廣泛研究。然而,在對臨近海岸區域進行觀測時,波束照射范圍內除了平靜海面外,往往還有臨海的陸地和島嶼等強散射分布目標。此時,陸地雜波的方位模糊分量的能量明顯高于平靜的海雜波,如果不對其進行區分和抑制,則近海岸區域內的慢速運動目標的檢測能力將急劇惡化。
在多通道合成孔徑雷達系統體制下,對近海岸方位模糊雜波的處理技術主要可分為數據預處理和數據后處理。數據預處理技術以數字波束形成(Digital Beam,Forming,DBF)技術為主,其利用方位多個接收通道增加空間采樣率,可以將模糊的信號頻譜重構出來[3]。數據后處理技術的核心在于方位模糊雜波空間位置的確定,進而選擇服從相同統計特性的雜波訓練樣本精確估計雜波背景協方差矩陣。束宇翔等人[4]使用統計直方圖進行雜波挑選,利用了多通道合成孔徑雷達圖像的幅/相特征,能夠對近海場景進行雜波分類。然而,此方法的分類精度取決于雜波統計直方圖中各類雜波的峰值可分程度,并且需要準確獲得各類雜波的峰值位置。因此,此方法無法滿足實際應用需求。XU等人[5]提出一種多特征自動分割算法(Multi-Feature Auto-segmentation-Based,MFAutoB),對幅/相特性不同的雜波進行建模,融合了多通道合成孔徑雷達圖像的干涉幅度和干涉相位信息,并利用EM(Expectation Maximum)算法實現了近海岸區域雜波的自動分割。MFAutoB方法雖然避免了人工選擇分類門限,但是其利用的EM算法無法對所分類別數目進行有效約束。雜波類別數目過少,無法準確地將各類雜波有效地分割出來。反之,同類雜波將被分為多個類別,仍然需要后續的人工選擇。更為重要的是,MFAutoB方法需要不斷迭代和對每一個距離-多普勒單元進行多個概率密度函數擬合,計算復雜度高,時效性較差。
為了快速精確定位和抑制方位模糊雜波,提出一種雜波分類輔助的近海岸模糊雜波抑制方法。首先對多通道合成孔徑雷達圖像進行多視干涉處理,獲得多視干涉復圖像的同時減少相干斑噪聲的影響;然后,綜合利用多視干涉幅度、多視干涉相位和多視干涉幅度梯度信息,構造每一個距離-多普勒單元的特征張量及MIFCM,并通過近海岸區域的能量概率分布統計圖和干涉相位概率分布統計圖自動對參考MIFCM進行選擇;接著,在MIFCM構成的黎曼空間上通過比較MIFCM間的近海岸距離完成自動分類,準確地獲取近海岸區域方位模糊位置。最后,在雜波分類結果的指導下,選擇服從IID的訓練雜波樣本精確估計雜波協方差矩陣,進一步進行自適應雜波抑制。
1 信號模型
以正側視為例,在斜距平面上沿航跡方向記為X軸,在沿航跡方向排列有M個接收通道,平臺以速度vp沿航跡方向勻速運動。斜距方向與沿航跡方向垂直,記為R軸。第一個通道為參考通道,第i個通道與參考通道的等效相位中心間距為di。在慢時間零時刻,參考接收通道位于(0,0),雜波位置為(x0,R0),如圖1所示。
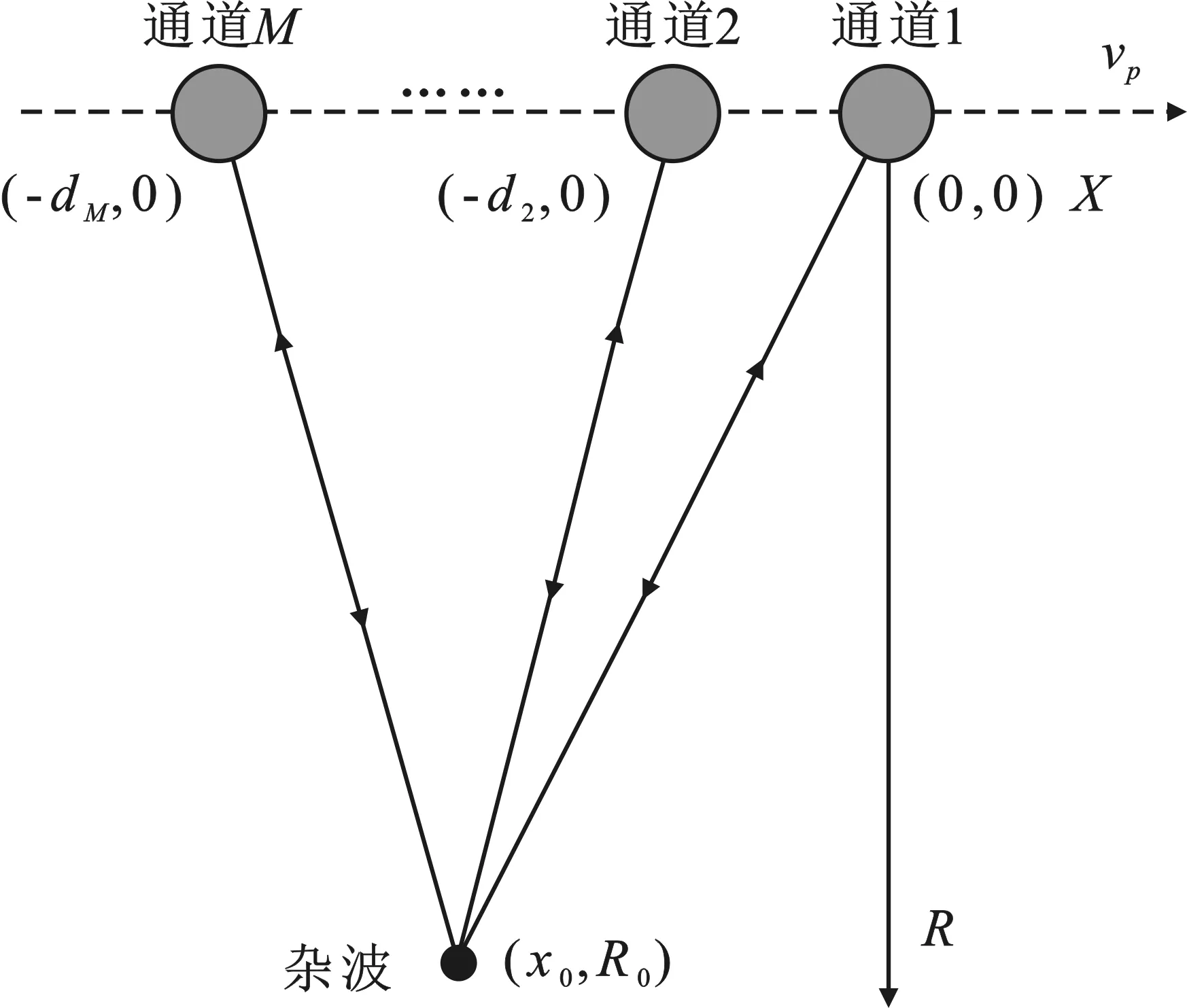
圖1 沿航跡多通道合成孔徑雷達幾何構型
在慢時間t=tm時刻,雜波點與第i個接收通道間的瞬時斜距為
(1)
經過脈沖重復頻率離散采樣和合成孔徑雷達成像后,雜波點(x0,R0)的第i個方位通道二維像可以表示為[4]
(2)

2 新提出的方法
2.1 計算特征協方差矩陣
包含圖像的多個特征信息的特征協方差矩陣能夠準確表示不同雜波的特性,能夠有效解決檢測、識別和分類等問題,已經被廣泛應用于計算機視覺、圖像處理和極化合成孔徑雷達圖像分類等領域[6-8]。首先通過空域多視處理獲得多視干涉復圖像,然后提取多通道合成孔徑雷達圖像的多維特征,構造每一個距離-多普勒單元的MIFCM。多特征圖像獲取示意圖見圖2。

圖2 多特征圖像獲取示意
對方位多通道合成孔徑雷達圖像數據進行通道間干涉和空域多視處理,獲得包含合成孔徑雷達圖像幅度信息和通道間干涉相位信息的多視干涉數據。任意兩個方位通道間(通道r和通道q,r≠q)的第k個距離-多普勒單元的多視干涉數據可表示為
(3)
其中,Ωx,y表示第(x,y)個像素的空域多視窗鄰域;W1×W1表示多視窗內像素總個數;η(x,y)=|Ix,y|,為多視干涉幅度;φ(x,y)=angle(Ix,y),為多視干涉相位;上標[·]*表示復共軛操作;zr(k)表示單視合成孔徑雷達圖像中第r個方位通道位于(x,y)的一個空域多視窗內第k個距離-多普勒單元的復數值。
圖像梯度往往被應用于合成孔徑雷達圖像特征提取和雜波分類中,能夠有效描述合成孔徑雷達圖像的紋理特征。為了表征合成孔徑雷達圖像的紋理特征,在通道之間的干涉幅度圖上沿不同方向取圖像梯度。像素p的沿x方向和y方向的梯度表示為
(4)
其中,rx和ry為用于計算梯度的x和y方向窗半徑。
綜合合成孔徑雷達圖像多視干涉幅度信息、多視干涉相位信息和結構梯度信息,文中構造的多特征圖像F為

(5)
其中,fp為所提取的第p個距離-多普勒單元的特征向量,(x,y)為其在合成孔徑雷達圖像上的空間位置。假設合成孔徑雷達圖像包含Nr×Nc個距離-多普勒單元,則提取所有距離-多普勒單元的特征向量后,多特征圖像F的大小為Nr×Nc×4。在多特征圖像F上利用大小為W2×W2的滑動窗Ξp對每一個距離-多普勒單元進行數據選取,獲得第p個距離-多普勒單元的MIFCM:
(6)

2.2 參考MIFCM的自動獲取
本節給出了利用合成孔徑雷達圖像的幅度和干涉相位概率統計分布圖給出陸地主雜波、模糊雜波和海雜波的參考MIFCM的選擇方法。為了說明文中對近海岸不同區域雜波的參考MIFCM的自動選擇方案,首先對近海岸合成孔徑雷達圖像數據(實驗參數如表1所示)分別統計雜波能量和干涉相位的概率分布,得到近海岸區域雜波的能量/干涉相位概率分布統計圖,如圖3所示。

表1 仿真的星載雷達系統參數
在圖3(a)中,從左至右分別為海雜波、方位模糊雜波和陸地主雜波的能量峰,其為不同類型雜波的能量中心;圖3(b)中的主峰區域為陸地主雜波的干涉相位,很明顯可以看出陸地主雜波的干涉相位主要在0附近。方位模糊雜波的干涉相位主要集中在左右兩個峰值處。因此,在能量概率分布統計圖上,很容易將陸地主雜波和海雜波區分開來,結合干涉相位概率分布統計圖,可以粗略地將海雜波、方位模糊雜波和陸地主雜波進行區分。

(a) 能量概率分布統計圖
將能量概率分布統計圖的左峰值(±δp附近)處的所有距離-多普勒單元的MIFCM矩陣的均值作為噪聲區域的參考MIFCM。將干涉相位概率分布統計圖的中間峰(±δp附近)處距離-多普勒單元的MIFCM的均值作為陸地主雜波區域的參考MIFCM,將左/右峰(±δp附近)處距離-多普勒單元的MIFCM的均值作為一次模糊雜波區域的參考MIFCM。后續雜波分類時,需要比較近海岸區域合成孔徑雷達圖像中的每一個距離-多普勒單元的MIFCM與各參考MIFCM之間的AIR距離,因此最終場景分類結果的優劣對上述峰值位置的準確性要求不苛刻。因此,采用能量/干涉相位概率分布圖可以快速高效地獲取海雜波區域、方位模糊雜波區域和陸地主雜波區域的參考MIFCM。
2.3 MIFCM間的AIR距離
由式(6)易知,各距離-多普勒單元的MIFCM為厄密特正定矩陣,其所構成的黎曼流形并不滿足歐氏空間的幾何性質,因此無法用歐氏距離作為MIFCM之間的測度。考慮到黎曼流形的幾何特性,常用AIR距離對黎曼流形上的兩個厄密特正定矩陣進行距離量測,如下所示[8]:
(7)
其中,Cref為各區域(陸地雜波、一次模糊雜波和海雜波)參考MIFCM,C為任意待分類距離-多普勒單元的MIFCM。{λi(Cref,C)}i=1,2,…n為矩陣Cref和C之間的廣義特征值,可以被計算為
λiCrefxi-Cxi=0 ,i=1,2,…n,
(8)
其中,xi≠0為Cref和C的廣義特征向量,n為協方差矩陣維數。
2.4 基于干涉幅度/相位和結構梯度特征協方差矩陣雜波分類
MIFCM包含了場景多通道,如圖4所示。基于干涉幅度/相位和結構梯度特征雜波分類的具體流程可以分為以下幾個步驟:

圖4 雜波分類方法
步驟1 對方位多通道合成孔徑雷達圖像進行多視干涉處理。
步驟2 提取多視干涉幅度、多視干涉相位和多視干涉幅度梯度特征,構造每一個距離-多普勒單元的MIFCM。
步驟3 分別對合成孔徑雷達圖像的雜波能量和通道間干涉相位進行概率分布統計。根據近海岸雜波的幅度/相位概率分布統計圖的峰值位置,分別自動選取海雜波區域、陸地主雜波區域和一次模糊雜波區域的訓練數據,進一步獲得各區域的參考MIFCM。
步驟4 計算每個距離-多普勒單元的MIFCM與各參考MIFCM之間的AIR距離Dsea、Dland和Damb。以距離最小的參考MIFCM的雜波類別為該距離-多普勒單元的類別,即Class=arg min{Dsea,Dland,Damb}。
步驟5 對場景分類結果進行MRF平滑處理[9-10]。利用MRF模型迭代計算距離-多普勒單元與其周圍距離-多普勒單元的空間相關性,對場景分類結果進行平滑,獲得最終分類結果。
圖像的多視干涉幅度/相位特征和多視干涉幅度梯度特征,相比于僅依靠幅度或相位門限的分類方法更加穩健。相比于MFAutoB方法,不需要多次迭代統計和擬合不同雜波的概率分布,通過比較待分類距離-多普勒單元的MCLM與各參考MCLM之間的AIR距離,能夠快速地對近海岸雜波進行分類。
2.5 基于雜波分類的自適應雜波抑制方法
對近海岸區域的不同區域分別進行選擇訓練樣本進行雜波協方差矩陣估計,并分別進行圖像域雜波抑制。雜波抑制處理的關鍵步驟如下:

步驟2 為了獲得最優的自適應雜波抑制濾波矢量,利用線性約束最小方差(Linear Constraint Minimum Variance,LCMV)準則計算目標函數[11-12]:
(9)

步驟3 將不同的最優權應用于對應的區域,進行多通道雜波抑制,獲得雜波相消結果。
3 實驗結果
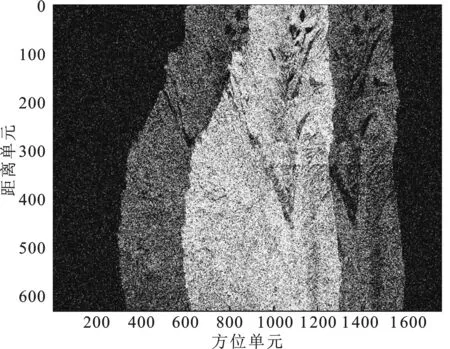
為驗證所提方法,仿真了星載合成孔徑雷達的回波信號并行合成孔徑雷達成像處理,如圖5所示。

圖5 仿真的星載SAR數據幅度/相位特性
圖5(a)為仿真數據的合成孔徑雷達成像結果,其中白色區域為雜波強度最強的陸地主雜波(島嶼),黑色區域為雜波強度較弱的海雜波,而方位模糊雜波位于海雜波和陸地主雜波之間。仿真條件:天線陣面被均勻劃分成兩個獨立的接收子通道,雷達采用全陣面發射、子通道接收的模式,陸地主雜波的雜噪比為23 dB,模糊雜波的雜噪比約為6 dB,其他參數見表1。
左右1階方位模糊雜波在通道間的干涉相位理論均值為θamb=±2πcd2/(λva)≈±2.5。由圖5(b)的多視干涉相位圖可知,仿真結果的干涉相位與理論值符合。
由實驗結果可以看出,文中方法能夠對陸地主雜波、方位模糊雜波和海雜波進行有效分類,同時很好地保持了類別之間的邊界,如圖6(c)所示。
為了說明所提方法在雜波分類和雜波抑制性能上的優越性,對比了非對稱圖和選擇濾波(Asymmetric Mapping and Selective Filtering,AM&SF)算法[13]和圖像選擇恢復(IMage Selective Restoration,IMSR)方法[14],其對方位模糊雜波位置的確定結果分別如圖6(a)和圖6(b)所示,對不同雜波的區域的分類精度如表2所示。

圖6 方位模糊位置確定結果
(a) AM&SF方法

表2 各方法分類精度 %

基于近海岸區域方位模糊雜波位置確定結果,在方位模糊區域選擇獨立同分布樣本進行圖像域自適應雜波抑制。圖7分別為AM&SF方法、IMSR方法及文中所提方法的方位模糊雜波抑制結果。
圖7(d)為對應方法雜波抑制相消結果在300號距離門處的切面圖,其縱坐標為以最大值歸一化的雜噪比。很明顯,AM&SF方法對方位模糊雜波的抑制剩余較多,這是因為AM&SF方法在選擇方位模糊雜波訓練數據時混入了較多的海雜波和陸地主雜波,其幅度/相位分布特性與模糊雜波不同。IMSR方法無法剔除方位模糊雜波中的部分陰影區域,其訓練樣本的幅度/相位特性仍然不具有同分布特性,進而造成方位模糊雜波抑制性能有一定的損失;筆者所提方法能夠將挑選出服從同一幅度/相位統計特性的方位模糊雜波樣本,對方位模糊雜波的抑制能力達到了最佳,雜波剩余能量更低。
4 結束語
筆者提出了一種雜波分類輔助的近海岸模糊雜波抑制方法。綜合利用了近海岸區域多通道合成孔徑雷達圖像的多視干涉幅度、多視干涉相位和多視干涉幅度梯度特征,構造了每個距離-多普勒單元的特征張量和MIFCM。通過MIFCM間的AIR距離判斷進行雜波分類,并在雜波分類結果輔助下選擇相對均勻的IID雜波樣本估計雜波協方差矩陣,進一步完成自適應雜波抑制。解決了近岸水面區域陸地雜波的強方位模糊分量造成多通道SAR-MMTI系統雜波抑制性能下降的問題。相較于其他方法,文中的方法的主要優勢在于:雜波分類精度高,能夠自動分類。文中所提方法可以應用于近海區域陸/海雜波分類、雜波抑制及目標檢測等領域。此外,在近海岸模糊雜波的特征選擇和提取方面,需要進一步研究。
猜你喜歡
數學小靈通(1-2年級)(2021年4期)2021-06-09 06:25:56
中學生數理化·七年級數學人教版(2019年4期)2019-05-20 10:06:32
中學生數理化·七年級數學人教版(2018年6期)2018-06-26 08:36:06
初中生世界·七年級(2017年9期)2017-10-13 22:27:46
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
電測與儀表(2015年5期)2015-04-09 11:30:52
