淺析十三陵電廠可逆式水輪發電機組鏡板形貌視覺測量技術
2021-05-11 18:59:02張文魁李賀寶胡新文
中國新通信 2021年4期
張文魁 李賀寶 胡新文


【摘要】 ? ?本文將詳細介紹可逆式水輪發電機組鏡板形貌視覺測量技術的主要內容與理論依據,通過專業的研究與調查,以十三陵電廠水輪發電機組的測量為例,全面展現了定向算法、標定技術、項目應用系統與運用過程等的設計,從而增進了人們對視覺測量技術的了解,在日后的使用中奠定適宜基礎。
【關鍵詞】 ? ?十三陵電廠 ? ?可逆式水輪發電機組 ? ?視覺測量技術
引言:
在測量可逆式水輪發電機組鏡板的過程中,其會遭受多重要素影響,如測量儀器的精度、不同的采樣布點模式或平面度誤差等,而視覺測量技術可有效降低其存有的誤差,提升電廠內部發電機組的鏡板狀態。
一、可逆式水輪發電機組鏡板形貌視覺測量技術的主要內容
在研究可逆式水輪發電機組鏡板形貌視覺測量技術前需了解其要研究的主要內容,具體來說,可重點研究三維視覺幾何中的定向算法,如捆綁調整算法、絕對定向算法、相對定向算法、前方交會算法與后方交會算法等,在開展工業近景測量時,若借助像點坐標來預設物體點坐標,其要設定與掌握對應性坐標間的變換關系,如空間直角與平面直角坐標系等。同時,相關人員還可研究相機標定技術,其可作用在高精度的攝影測量下,簡單來講,標定技術會對測量精度產生直接影響,即便是傳統相機標定也要借助精度較高的標定塊,若想掌握適宜的相機成像模型,技術人員可開展專業性研究,可設置合適的小孔成像模型。在小孔成像模型內其能完成三點共線,即像點、鏡頭中心與物方點等,由于不存在理想相機,且在攝影期間會遭受多種要素干擾,從而使理論位置與成像平面存有偏差,降低其精準度。此外,若攝影測量系統獲取了對應性圖像,技術人員還可采用三維重建技術,率先檢測其內部標志點,得到該像素的圖像坐標,只有標志點檢測的精度較高,才能真正提升其攝影測量技術,通過圖像內部的中心坐標可開展三維重建工作,從而優化可逆式水輪發電機組鏡板形貌,理解視覺測量技術的全部內容[1]。
二、鏡板形貌視覺測量技術的理論依據
為提升鏡板形貌視覺測量技術的運用水平,技術人員需找到以該項技術為依托的理論依據,經過詳盡的研究后找出了以數字照相為基礎的測量系統,其測量方式要借力于攝像機,在測量同一物體時可運用不同方位,通過適宜的算法與圖像處理來獲得對應性空間三維坐標值。相較于舊式的機械導軌測量法,當前的測量方式更為靈活與簡單,該系統結構也與先進的測量技術相適應,無論是操作步驟、速度與精度都有了更高的需求。在研究三維重建算法的過程中,借助遞增式策略可有效處理無序、大規模的圖像,如埃及金字塔、羅馬斗獸場的三維重建,通過對該系統的使用,提升了其內部圖像序列的有序性,在系統集成化方面還存在一定的提升空間。
當前單攝像機類的視覺測量技術的應用已較為廣泛,其在使用期間帶有諸多優勢,如測量精度較高、成本低、操作便利且系統構成相對簡單等,在開展視覺測量的過程中,其會受到特定編碼數量的限制,在進行三維重建時只能測量某一物體的一個區域,若想測量大型物體,如飛機等的三維重建要借助相機在其周遭拍攝多種圖像,基于圖像間的重疊性,有助于提取圖像特征,只有保證一定量的圖像數據基數,才能讓測量工作變得更為精準。
三、水輪發電機組鏡板形貌視覺測量技術在十三陵電廠的實際應用
3.1設置定向算法
為掌握視覺測量技術的運用效果,試驗人員以十三陵電廠中的水輪發電機組為例,闡述視覺測量技術在該項目中的實際應用。在正式研究該項目時,要設置合適的定向算法,為找出攝像機坐標系與圖像坐標系的位置,技術人員需設置圖像中心點的坐標,即圖像平面與該光軸的交點,uo,vo,在X與Y的方向中還存有不同的物理尺寸,如dx與dy,若想找出X與Y方向中的單位長度內的像素個數,可依據該公式,。當該圖像平面在實際成像的過程中,若平面坐標的設置較寬松,主點的像的坐標值應不等于零,其存有的數值將極為微小。部分相機鏡頭還存在物鏡畸變等不良要素,與理論位置相比,其平面中的實際坐標會出現不同程度的偏差,嚴重影響共線方程的基本形態[2]。
3.2加強標定技術的設計
在開展標定技術的設計前,技術人員應意識到該技術在視覺測量項目中的重要性,該技術水準的優劣將直接影響其測量精度,傳統標定技術要根據相機測算出精度較高的標定塊,利用該標定塊來找出三維點中的坐標與其相關的內外參數。在研究數值相機攝影的過程中,若出現干擾成像要素其相機鏡頭可出現平面正交畸變、偏心畸變、徑向畸變與平面不平畸變等,受多種畸變影響,其會生成誤差,從而難以形成共線方程。
具體來說,針對徑向畸變而言,當鏡頭出現徑向畸變期間,其理想點與實際像點會沿著徑向進行不同方式的偏移,其原因在于鏡片會生成不同程度的加工誤差,此類畸變的主要特征為其會沿著鏡頭中心進行合理性對稱,該像點的畸變大小與其鏡頭中心點的距離密切相關。
為改進標定精度,在進行實際標定時技術人員要利用工業攝影測量內的捆綁調整法,在制定出一定的目標后同時測算內外參數,通過整體平差的計算,不僅改善了該攝像機中的內外部參數值,其平面模板內部的特征點也獲得了相應改進,找出了適宜的物方坐標。在制定該算法期間,技術人員需仔細考量該標定物中的物方坐標,確認其各項數值,嚴格控制該坐標可能生成的誤差。在鏡頭畸變的模型內相關人員還要全面考慮薄棱鏡畸變、切向畸變與徑向畸變等。對于捆綁調整法的使用,技術人員僅需掌握各物方點間的距離,找出物方點、相機外部與內部的參數坐標值,從而完成相機標定。
3.3設置適宜的項目應用系統
為保障三維坐標的測量效果,技術人員要設置適宜的三維重建系統,其具體流程主要為開展大規模的圖像序列,借助圖像特征間的關系完成匹配,繼而進行增量式重建,再利用適宜的方法找出各坐標內部的測量點與對應圖像[3]。
一般來講,在使用大規模圖像序列期間,技術人員應找出各圖像特征間的關系,通過對其特征的提取來完成匹配工作。在進行增量式重建時要設置出合理的三維坐標系統,在計算機互聯網中設定初始化模式,并挑選出最優的初始對,再通過計算測算出初始項的三維模型。在研制三維模型的過程中還要重建三角法,若其需要處理相應圖像可適時增加圖像,通過PnP求解來達到圖像處理效果,借助全局光束平差來找到各項三維點的坐標,繼而提升視覺測量技術的測量水準。
3.4項目運用過程
在使用該項目前,技術人員應確認可逆式水輪發電機組視覺檢測體系的構成,在該系統中其主要帶有光源背景、被測鏡板、CCD相機、圖像采集卡、計算機互聯網系統等,透過數據、圖像的采集與處理來完成對應的視覺檢測工作。
一般來講,在應用視覺測量技術時工作人員應科學打開光源,利用相機來開展環繞拍攝工作,利用相應算法在完成圖像照片的處理后獲得與鏡板形貌有關的數據信息,該系統的內部系統含有測量編碼點、XXD攝像機與光源,并在互聯網計算機中完成軟件系統的設計,其在處理鏡板圖像的過程中要嚴格遵照該體系內部的實際要求,以獲取鏡板尺寸類的數據。同時,在測量可逆式水輪發電機組鏡板形貌期間,除了要測量該鏡板的外形三維尺寸外,還要科學分析鏡板內部的平面度、測量裝配圓柱中的圓柱度、研究鏡板平面與裝配圓柱軸線的垂直度等,在完成相關數據的測量后,要依照攝影測量軟件中的各類步驟合理處理對應性照片,該軟件可依照該照片的特征點進行自動掃描,通過對其同名點的匹配來掌握其具體數值,以此來掌握該三維坐標中的所有測量點。
具體來說,根據視覺測量技術的應用現狀,技術人員有效掌握了鏡板平面的測量數據,如表1所示。
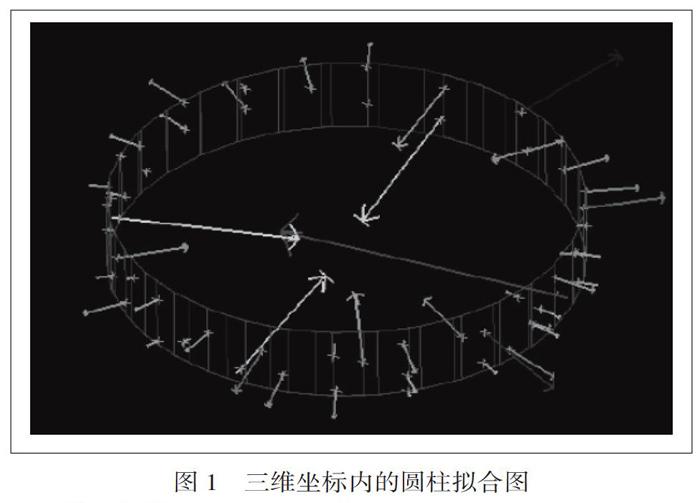
透過表1中的數據,技術人員可切實掌握鏡板平面內的測量數據,依照算法中三維坐標的各項標志點,認真研究水輪發電機組的鏡板測量項目,如鏡板平面與裝配圓柱軸線的垂直度、鏡板間的平面度與裝配圓柱間的圓柱度等。試驗人員還要全面擬合三維坐標中的測量標志點,由于每個點的實際測量值都與預設不同,要合理測算出其各項偏差值,繼而評價出該鏡板平面的整體質量,增強相關數據的準確性,在三維坐標中圓柱的擬合狀態,如圖1所示。
四、總結
綜上所述,為改進可逆式水輪發電機組鏡板形貌,技術人員可采用視覺測量技術,利用該技術全面收集其各類坐標值,在使用該技術的過程中,通過相關算法與捆綁調整法,可有效對比出其測量精度,在掌握了該項算法的核心技術后,給大尺寸零件的測量提供了便宜的條件。
參 ?考 ?文 ?獻
[1]李鵬陽,楊文輝,曹利平,等.圓盤類零件幾何量機器視覺測量技術研究[J].西安工業大學學報,2020,40(06):598-604.
[2]胡莊穩,陸華才,高文根.機器視覺側圍涂膠檢測系統的設計與研究[J].安徽工程大學學報,2019,34(05):47-52.
[3]何越磊,余佳磊,陳猛,等.基于機器視覺測量技術的地鐵站臺限界檢測儀設計[J].城市軌道交通研究,2019,22(08):63-66.
