同軸六分支分扭人字齒輪傳動系統的配齒條件研究
2021-05-18 06:19:08李志賓王三民李飛彭麒安李劍鋒
西北工業大學學報 2021年2期
李志賓, 王三民, 李飛, 彭麒安, 李劍鋒
(西北工業大學 機電學院, 陜西 西安 710072)
與平行軸和行星齒輪傳動相比,多分支齒輪傳動采用功率分流方式,能夠實現大功率、大減速比、大扭矩傳動,廣泛應用于航空和艦船等動力系統中。
近年來出現的同軸功率分支因體積小、尺寸緊湊等優點越來越廣泛地得到應用和重視[1-3]。White[4]在1989年就研究直齒圓柱齒輪功率分流傳動系統的結構特點,提出相比于傳統的行星齒輪傳動具有可靠性強、承載能力大、結構緊湊、重量和噪聲小等特點。Jose等[5]對分扭變速箱中圓柱齒輪傳動在航空、艦船等領域的應用進行了全面研究,提出多個齒輪傳動同時嚙合的結構構型,并建立同步嚙合數學模型,通過數值計算獲得了各齒輪齒數選定方案。楊振等[6-7]在功率分流齒輪系統的動力學特性、傳動平穩性及強度方面進行了相應的研究。相涯等[8]針對功率四分支齒輪傳動系統在考慮各支路均載基礎上建立了系統的配齒條件并進行了計算。李枝軍等[9]針對圓柱齒輪分扭傳動考慮配齒結果對系統動力學特性的影響而進行配齒條件研究,提出不同的配齒方法并進行計算分析。閻昌琪等[10]對功率雙分支傳動兩級齒輪減速器優化設計進行了分析,建立了結構參數優化模型,并開發了相應的計算程序。綜上所述,現有文獻并沒有涉及到對齒輪分支傳動系統在每個支路同步嚙合性能方面的研究。由于分扭傳動齒輪結構是通過多個支路同時進行動力和運動傳遞,每個支路之間的運動互相影響,這為構型與配齒參數設計帶來了困難。
本文針對同軸六分支分扭人字齒輪傳動系統,根據其構型的特點及其配齒對系統性能的影響,考慮嚙合相位和齒輪模數等幾何參數,進行了齒輪配齒條件與配齒方法的理論研究,建立了分支齒輪傳動傳動比條件、鄰接條件、同心條件和同步正確嚙合條件的數學關系式,并對每個支路同步嚙合進行研究,提出了同軸六分支齒輪傳動系統的配齒設計方法,為輸入與輸出軸為同軸多分支傳動齒輪系統構型設計提供了理論基礎。
1 同軸六分支分扭人字齒輪傳動系統的配齒條件
1.1 六分支分扭人字齒輪傳動系統
為了滿足大功率傳動需要,齒輪分扭傳動系統中一般多采用人字齒輪,本文以同軸六分支分扭人字齒輪傳動系統為研究對象,如圖1所示。
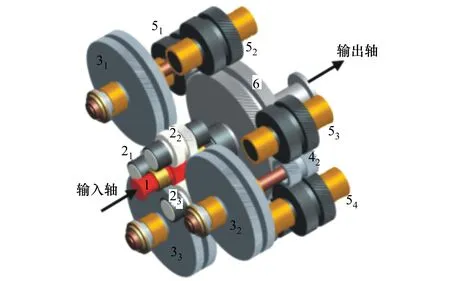
圖1 同軸六分支分扭人字齒輪傳動系統
該系統中第Ⅰ級傳動為三分支,即輸入齒輪1同時驅動齒輪2i(i=1,2,3),實現功率三分流;第Ⅱ級傳動為齒輪2i(i=1,2,3)與對應的齒輪3i(i=1,2,3)嚙合,各分支功率傳遞到雙聯齒輪3i-4i(i=1,2,3)上;第Ⅲ級傳動為齒輪41驅動齒輪5i(i=1,2),齒輪42驅動齒輪5i(i=3,4),齒輪43驅動齒輪5i(i=5,6),再次實現三重功率兩分流;第Ⅳ級傳動中齒輪5i(i=1,2,3,4,5,6)同時與輸出軸上齒輪6嚙合,實現功率的匯流,且輸入軸與輸出軸在同一條直線上,完成功率輸出。在確定該系統各輪齒數、位置角等幾何參數時,還要滿足傳動比、鄰接和同心條件,同時要考慮其運動性能相關的同步嚙合條件。
1.2 傳動比條件
設輸入齒輪1的齒數z1,齒輪2i(i=1,2,3)的齒數z2,齒輪3i(i=1,2,3)的齒數z3,齒輪4i(i=1,2,3)的齒數z4,齒輪5i(i=1,2,3,4,5,6)的齒數z5,齒輪6的齒數z6,則系統的總傳動比為

(1)
式中:第Ⅰ級傳動比為i1=z2/z1;第Ⅱ級傳動比為i2=z3/z2;第Ⅲ級傳動比為i3=z5/z4;第Ⅳ級傳動比為i4=z6/z5。
設齒輪系統給定傳動比為id=n1/n6,n1為輸入轉速,n2為輸出轉速。考慮系統受齒輪齒數為整數等影響,實際傳動比i與給定傳動比id存在相對誤差Δi。其許用值[Δi]一般取3%至5%之間[11],即傳動比條件為
(2)
1.3 鄰接條件
圖2表示齒輪系統一個分支,在同軸六分支分扭人字齒輪傳動系統進行設計時,要使各齒輪之間不發生相互碰撞,必須保證齒輪1、31和齒輪51、52之間的齒頂圓必須有一定間隙。設該分支中齒輪1與齒輪21、31位置角為αg,在αg取最大和最小值時齒輪幾何極限分布如圖2所示。dia和di(i=1,21,31)分別表示齒輪1、21、31的齒頂圓和分度圓直徑。由圖2可得齒輪1與齒輪31滿足的條件為
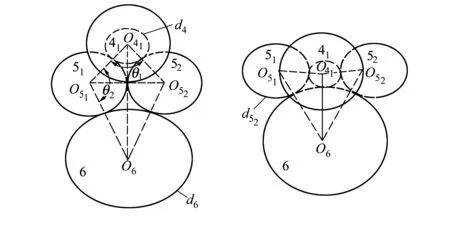
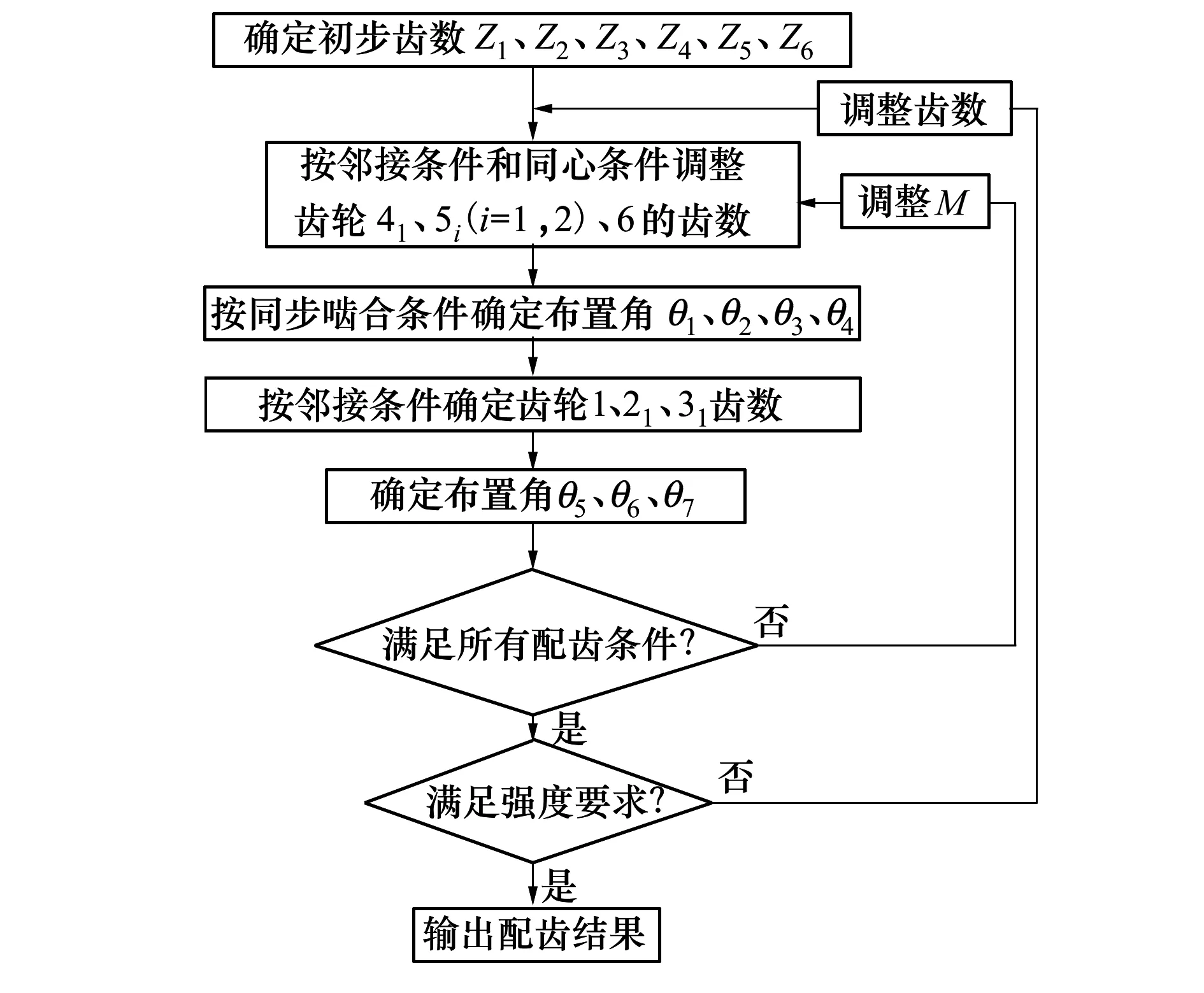
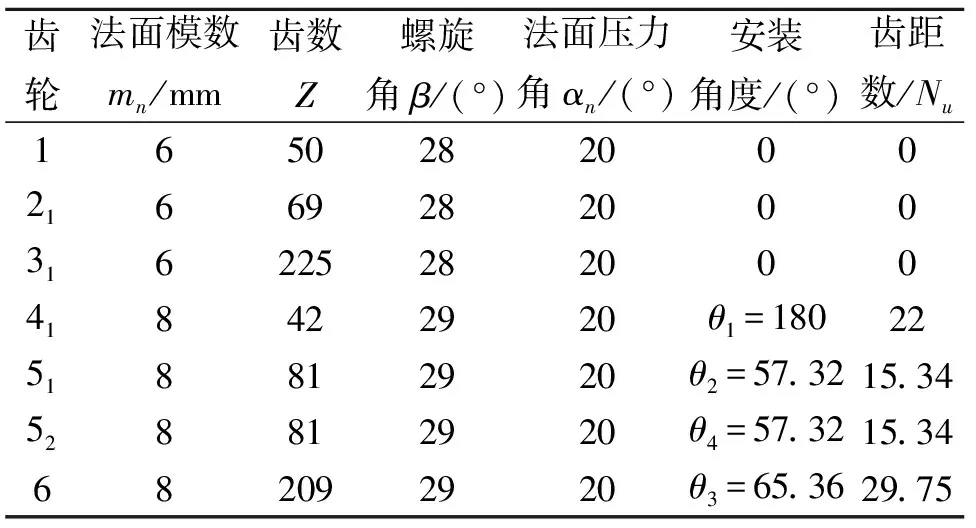
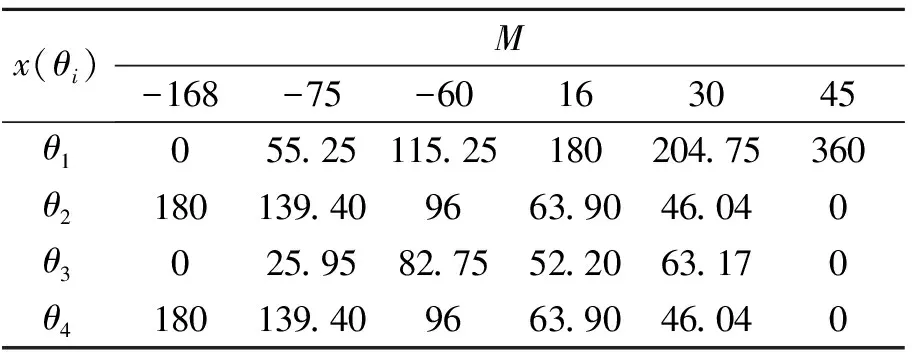
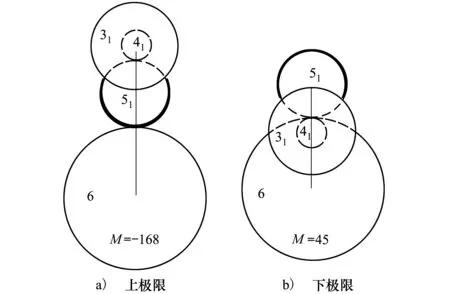
d1a+d3a (3) 式中,Oi(i=1,2,3)表示齒輪的幾何中心。與齒輪1相嚙合另2個分支也是此規律,這里不再贅述。 圖2 系統第Ⅰ級單一分支極限位置 設分支齒輪41、51、52和齒輪51、41、6之間位置角分別為θi(i=1,2),則當θ1取最大和最小值時齒輪幾何極限分布如圖3所示。Oi(i=41,51,52,6)表示齒輪41、51、52,6幾何中心。圖3中,dia和di(i=41,51,6)分別表示齒輪41、51、6的齒頂圓直徑和分度圓直徑。由圖3得齒輪51與齒輪52鄰接條件 圖3 系統第Ⅲ級單一分支極限位置 (4) 齒輪41和齒輪6鄰接條件為 (5) 該同軸六分支人字齒輪分扭傳動系統同心表現為:3個雙聯齒輪上的齒輪3i(i=1,2,3)和齒輪4i(i=1,2,3)軸線與雙聯齒輪軸線重合,且平行于齒輪5i(i=1,2,3,4,5,6)旋轉軸線。如圖4設θi(i=1,3)分別表示齒輪41、51、52和齒輪6、51、52之間的位置角。di(i=41,51,6) 表示齒輪41、51、6的分度圓直徑,Oi(i=41,51,52,6)表示齒輪41、51、52、和齒輪6幾何中心。由圖4可得該分支滿足 (6) 將其各齒輪分度圓直徑代入(6)式,可得 (7) 同理其他2個雙聯齒輪嚙合齒輪分支同心條件也是此規律,這里不再贅述。 圖4 齒輪系統分支同心簡圖 該齒輪系統存在3個雙聯齒輪,為了使得到構型滿足互換性使用要求,在一般情況下,2個雙聯齒輪不完全一樣,但仍假設雙聯齒輪位置角完全相同[12]。如圖5所示,規定點Q齒和點P齒處在同一平面ABCD內,位置角為0°進行分析。 圖5 雙聯齒輪位置角 圖6表示同軸六分支分扭人字齒輪傳動系統軸向構型簡圖,各齒輪分度圓相切處代表該處相嚙合。齒輪傳遞載荷受齒輪副綜合剛度K影響很大[13],為了滿足齒輪系統傳動時均布安裝和運動同步,規定齒輪1和齒輪2i(i=1,2,3)之間位置角為120°;以齒輪1為中心,雙聯齒輪上的齒輪3i(i=1,2,3)和齒輪4i(i=1,2,3)分別與齒輪1位置角為120°。因此確定齒輪系統同步嚙合問題,只要保證齒輪41、5i(i=1,2)與齒輪6,齒輪42、5i(i=3,4)與齒輪6,齒輪43、5i(i=5,6)與齒輪6分別同步嚙合。 圖6 同軸六分支分扭人字齒輪傳動系統軸向構型簡圖 由以上分析可知,只要保證與齒輪1相嚙合的三分支其中一個分支,便能使輪系滿足同步正確嚙合。圖7表示以齒輪41、5i(i=1,2)與齒輪六分支為對象分析,假設齒輪31和41構成位置角為0°雙聯齒輪。點A,B,C和D分別表示齒輪41、51、52和輸出齒輪6的圓心。角θi(i=1,2,3,4)為各相鄰齒輪連心線組成四邊形的4個內角,即齒輪的位置角。假設齒輪1、21和31調整到正確嚙合,若要保證構型同步嚙合,只要齒輪41、51、52和齒輪6正確嚙合即可。 規定雙聯齒輪初始狀態:左邊齒Q和齒P通過齒輪連心線AB;右邊齒q和齒p需按圖7表示的運動方向轉動ψ+Δψ角才通過連心線AD,ψ表示齒輪52上n個齒距的圓心角,Δψ表示齒輪52上n*個齒距的圓心角(n取整數,0 定義Ti(i=0,1,2)時刻說明分支的嚙合條件,分析如下: T0時刻:將T0定義為圖7所示的齒輪初始嚙合狀態時刻,齒輪1、21和齒輪31正確嚙合,齒輪51的齒E通過連心線BC,齒輪52的齒G再順時針轉動ψ+Δψ通過連心線AD。 圖7 分支嚙合條件簡圖 T1時刻:將T1定義為隨齒輪轉動,齒輪51的Q點與齒輪6的F點相切時刻。此刻,Q點與F點相切,而點G與H未相切,但齒輪51、52和齒輪6轉過相同齒距數,對應如圖7所示的粗實線標記弧長。 T2時刻:將T2定義為隨齒輪繼續轉動,齒輪52的G點與齒輪6的H點相切時刻。此刻,G點和H點相切,而Q點與F點退出相切。從T0到T2時刻,齒輪51、52和齒輪6同樣轉過相同齒距數,對應如圖7所示的灰色實線標記弧長。 由此可知,T1時刻相切唯一對應此處輪齒嚙合位置,T2時刻相切唯一對應此處輪齒嚙合位置。要保證齒輪41、51、52和齒輪6正確嚙合,只要T1和T2時刻齒輪6上的F和H點嚙合的輪齒具有相同嚙合位置,即齒輪6上的F和H點之間的弧長對應的齒距數為整數,稱齒輪同步嚙合的嚙合條件。如果不能滿足此嚙合條件,則該同軸六分支分扭人字齒輪傳動系統至少存在一處嚙合位置干涉。 設齒輪41、51、52和齒輪6的齒數分別為:z41、z51、z52和z6,根據上述嚙合條件和各齒輪的齒數,齒輪51圓心角θ2內的齒距數為 (8) 齒輪6圓心角θ3內的齒距數為 (9) 齒輪52上灰色標記的弧線對應的圓心角齒距數為 (10) 根據嚙合條件,齒輪6上的F和H點之間弧長齒距數為整數,可得到齒輪齒數與位置角的關系 Nu52+Nu6-Nu51=N (11) 式中,N為整數,將(8)~(10)式代入(11)式,經整理得 (12) 式中,(N+s-z51-n)表示一個整數,以整數M代之,可得齒輪嚙合條件簡化后的表達式 θ1·z41-θ2·z51+θ3·z6-θ4·z52=2π·M (13) 在四邊形ABCD中,由內角和定理得 θ1+θ2+θ3+θ4=2π (14) 在四邊形ABCD中,由對角線余弦定理得 標準斜齒圓柱齒輪分度圓半徑表示為 (17) 式中,ri,zi,mit,min和β分別表示齒輪i的分度圓半徑、齒數、端面模數、法面模數和螺旋角,i=41,51,52,6。代入(15)式、(16)式得簡化后為 (18) 式中,mL=m41t=m51t=m52t,mR=m41t=m6t=m52t (19) 式中:mL=m41t=m51t=m6t,mR=m41t=m6t=m52t 根據齒輪嚙合條件,相嚙合齒輪模數相等,可得 若已知齒輪齒數zi和模數mit,則可通過(13)、 (14) 、(17) 、(20)和(21)式組成的方程組求未知位置角θ1,θ2,θ3和θ4,且方程組的解受(13)式中的整數M取值影響。 針對圖6所示的同軸六分支分扭人字齒輪傳動系統,由于齒輪2i(i=1,2,3)、齒輪3i(i=1,2,3)、齒輪4i(i=1,2,3)和齒輪5i(i=1,2,3,4,5,6)均勻分布于輸入齒輪1軸線和輸出齒輪6軸線同一直線周圍,只要確定齒輪1、21、31、41、5i(i=1,2)與齒輪6的位置,整個傳動系統中齒輪之間位置便確定。針對圖7分支齒輪傳動,配齒條件計算的步驟如下: 1) 由初步設計方法得到滿足齒輪傳動強度和傳動比等參數的初步齒數(齒輪1、21、31、41、5i(i=1,2)與齒輪6的齒數分別為Z1、Z2、Z3、Z4、Z5、Z6),通過進行齒數組合調整,滿足上述配齒條件。 2) 調整齒輪41、5i(i=1,2)、6的齒數組合。在齒輪傳動系統中,相互嚙合的齒輪越多,就會構成封閉嚙合鏈,需要滿足的配齒條件就越多,因此首先要調整齒輪41、5i(i=1,2)、6的齒數,使之滿足相鄰條件和同心條件后再調整齒輪1、21、31的齒數。 θ1Z4-2θ2Z5+θ3Z6=2π·M (22) θ1+θ2+2θ3=2π (23) 式中,M=(N+s-Z51-n),由θ2=θ4可知存在3個未知變量,故在四邊形ABCD中只需要用一次對角線余弦定理 (24) 對(22)、(23)和(24)式組成的方程組進行求解,會得到一個關于θ1的超越方程 (25) 只要求出θ1的值,則可得θ3和θ2 θ3=arccos (26) θ2=2π-θ1-2θ3 (27) 圖8表示超越方程(25)在M取為0的f(θ1)求解曲線。當整數M取不同值時,求解曲線形狀不變,只是求解曲線的位置在f(θ1)方向上下移動。圖8上的K點表示曲線與橫軸的交點,即當f(θ1)=0未知量θ1值。在θ1∈[0,2π]范圍內,求解曲線存在一個峰谷,當整數M取某值時,超越方程的求解曲線與x(θ1)有2個交點,即存在2個θ1值。在單一分支中,已知齒輪齒數、模數,可得方程(25)~(27)式解,即齒輪之間的位置角。然后檢驗齒輪51與齒輪52鄰接條件式(4)和齒輪41和齒輪6鄰接條件(5)式及分支的同心條件(7)式是否同時滿足,若滿足則進行下一步計算,若不滿足則調整整數M繼續調整齒輪41、齒輪5i(i=1,2)和齒輪6的齒數。 圖8 超越方程(25)在M=0的求解曲線 4) 確定齒輪1、21、31的布置角θ5、θ6、θ7。由于齒輪1與齒輪6是同軸的,而齒輪2i(i=1,2,3)以齒輪1圓心為中心均勻分布。由圖9可知 (28) Oi(i=1,2,3)表示齒輪1、21、31的幾何中心,di(i=1,2, 3)表示齒輪1、21、31分度圓直徑。 圖9 齒輪1、21、31分支簡圖 如圖9所示,初始參數確定的齒輪分度圓半徑滿足關系式:DO2O3+DO1O2>DO1O3,就能確定布置角θ5、θ6、θ7。然后檢驗齒輪1、21、31的鄰接條件式(3)是否滿足,最后檢驗是否滿足傳動比式(1)和(2)。若滿足說明各齒輪齒數滿足配齒條件,若不滿足則繼續調整齒輪1、21、31的齒數,甚至重新選定整數M調整齒輪41、5i(i=1,2)、6的齒數。圖10表示配齒計算過程流程圖。 圖10 配齒方法流程圖 某艦船的動力傳動系統采用同軸六分支分扭人字齒輪傳動。其初步設計參數如表1所示,從表1得齒輪41、5i(i=1,2)、6同步嚙合條件均不滿足。 表1 齒輪初步參數 采用上述同步嚙合配齒方法,在整數M取不同值時,方程式(25)~(27)得不同解。表2給出了整數M取-168到45之間不同值時的位置角。當M=-168,齒輪41處于上極限位置,隨著整數M取值變化,在M=45時,齒輪41處于下極限位置。 表2 系統分支中齒輪之間布置角 圖11表示分支的2個極限位置,黑色粗曲線表示齒輪重合。 圖11 2個極限位置 圖12所示為M=-75時,θ1=55.25°、θ2=139.40°、θ3=25.95°、θ4=139.40°,考慮實際制造和安裝誤差等因素影響,齒輪51和齒輪52很容易發生干涉。圖13所示為M=30時,θ1=204.75°、θ2=46.04°、θ3=63.17°、θ4=46.04°,再考慮實際制造和安裝誤差等因素影響,齒輪41和齒輪6很容易發生干涉。圖14為M=16時,θ1=180°、θ2=63.90°、θ3=52.20°、θ4=63.90°,分支各齒輪不發生干涉。 圖12 M=-75時分支嚙合簡圖 圖13 M=30時分支嚙合簡圖 圖14 M=16時分支嚙合簡圖 表3為M=16時的配齒結果,此時布置角θ1=180°、θ2=63.90°、θ3=52.20°、θ4=63.90°,該結果不僅滿足同步嚙合條件,也滿足傳動比條件、鄰接條件和同心條件。圖15表示表3數據參數化設計得到同軸六分支分扭人字齒輪傳動系統的三維結構模型,各支路滿足均布條件和同步嚙合條件。如圖16所示,通過三維軟件proe驗證分支各齒輪之間的嚙合狀態,無干涉且具有良好的接觸狀態。因此該配齒方法在同軸的多分支分扭齒輪傳動系統的構型設計 表3 齒輪設計參數 上具有普適性,所得結論同樣適用于較為簡單的二分支、三分支及含有惰輪三分支等傳動系統設計。 圖15 同軸六分支人字齒輪傳動系統圖16 齒輪41、51、52和6之間嚙合狀態 1) 在設計同軸六分支分扭齒輪傳動系統中除了滿足傳動比條件外,還必須滿足與裝配有關的鄰接和同心條件,更重要的是滿足與傳動性能有關的同步嚙合條件。 2) 同軸分扭齒輪傳動系統同一平面上相互嚙合的傳動結構同步配齒條件與各個齒輪的模數、螺旋角無關,只與各齒輪的齒數和位置角相關,故本文方法也適用于由直齒輪和斜齒輪組成的分支傳動。 3) 文中建立關于齒數、模數和位置角之間關系的超越方程,在整數M取不同值時,超越方程解的曲線形狀不變,只是解的曲線位置在f(θ1)方向上下移動,能得到不同的齒輪傳動構型。

1.4 同心條件


1.5 同步嚙合條件







2 配齒計算方法



3 配齒算例



4 結 論