基于ABAQUS的裝載機(jī)駕駛室防滾翻安全性能分析
2021-05-22 06:43:22詹大桂李逍遙康亞卓
機(jī)械工程師 2021年5期
詹大桂,李逍遙,康亞卓
(國家工程機(jī)械質(zhì)檢中心,北京102100)
0 引言
裝載機(jī)屬于鏟土運(yùn)輸機(jī)械中的一種重要裝備,用途極為廣泛,然而隨著使用數(shù)量的增加及使用工況的復(fù)雜性,翻車事故率不斷升高,由于駕駛室滾翻過程中受到?jīng)_擊而變形或被外物擊穿而使人員安全受到威脅,因此駕駛室保護(hù)結(jié)構(gòu)的合理設(shè)計(jì)對(duì)駕駛室操作人員的安全起著至關(guān)重要的作用[1]。
本文根據(jù)企業(yè)的20 t裝載機(jī)駕駛室防滾翻保護(hù)結(jié)構(gòu)(ROPS)實(shí)驗(yàn)結(jié)果對(duì)其進(jìn)行結(jié)構(gòu)優(yōu)化,并利用非線性有限元軟件ABAQUS對(duì)其進(jìn)行了仿真分析,為符合國家和國際標(biāo)準(zhǔn)的裝載機(jī)駕駛室ROPS的設(shè)計(jì)提供參考, 對(duì)減少裝載機(jī)翻車事故傷害具有積極意義。
1 裝載機(jī)駕駛室安全性能要求
駕駛室安全性能必須滿足GB/T 17922—2014[2]所規(guī)定的最小側(cè)向、垂直、縱向承載能力和最小側(cè)向能量吸收能力的要求,同時(shí)駕駛室ROPS結(jié)構(gòu)不得侵入撓曲極限量DLV。
1.1 滾翻保護(hù)結(jié)構(gòu)(ROPS)
滾翻保護(hù)結(jié)構(gòu)[2]是用于保護(hù)駕駛員在機(jī)器滾翻過程中免于受到傷害的結(jié)構(gòu)件的總稱,其主要是裝載機(jī)預(yù)裝的司機(jī)保護(hù)性設(shè)施。
1.2 擾曲極限量(DLV)
擾曲極限量(Deflection-Limiting Volume)[2]是根據(jù)一個(gè)75 kg左右、坐姿、著普通衣服并佩戴安全帽的普通男性駕駛員定義的三向投影的近似輪廓。駕駛員DLV 與ROPS 的相對(duì)位置如圖1所示。
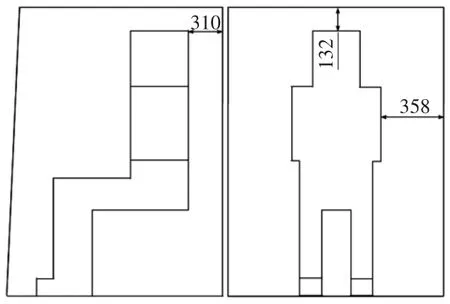
圖1 DLV與ROPS相對(duì)位置
1.3 ROPS的力學(xué)性能要求
根據(jù)GB/T 17922—2014標(biāo)準(zhǔn)要求,裝載機(jī)ROPS加載包括側(cè)向、垂直及縱向的3個(gè)方向的加載,表1所示為裝載機(jī)各方向加載的力學(xué)載荷承受要求,本文所分析的裝載機(jī)質(zhì)量為20 000 kg。
表1 駕駛力學(xué)性能要求
2 裝載機(jī)ROPS試驗(yàn)
本文研究的裝載機(jī)ROPS與駕駛室做成一體,駕駛室長1515.4 mm,寬1424 mm,高1879 mm。滾翻保護(hù)結(jié)構(gòu)與車架螺栓固定,駕駛室去掉非主要覆蓋件后的結(jié)構(gòu)代表一臺(tái)裝載機(jī)的保護(hù)結(jié)構(gòu)輪廓。固定裝置的強(qiáng)度等級(jí)應(yīng)高于ROPS,也即固定裝置的變形相比于ROPS的變形微乎其微。載荷分配器是為防止保護(hù)結(jié)構(gòu)在加載時(shí)局部被穿透。
2.1 側(cè)向加載試驗(yàn)
側(cè)向加載油缸作用于載荷分配器,載荷分配器將載荷相對(duì)均勻地作用于滾翻保護(hù)結(jié)構(gòu),載荷作用點(diǎn)位于上部側(cè)向橫梁上,沿DLV頭部及肩部的中心平面方向。
初始力為水平方向加載,垂直于ROPS的側(cè)向立柱的輪廓平面。允許加載力隨著加載進(jìn)行有方向的變化。側(cè)向加載時(shí),力和能量的要求可不同時(shí)達(dá)到,即在某一個(gè)達(dá)到要求前,另一個(gè)可以超過規(guī)定值。持續(xù)加載至力值和能量值均達(dá)到或超過規(guī)定的數(shù)值要求為止。
加載過程的力與位移、力與能量的數(shù)據(jù)如圖8、圖9所示,加載后司機(jī)室變形如圖2所示。

圖2 滾翻保護(hù)結(jié)構(gòu)側(cè)向加載試驗(yàn)

圖3 滾翻保護(hù)結(jié)構(gòu)垂直方向加載試驗(yàn)
2.2 垂直加載試驗(yàn)
消除側(cè)向載荷后,垂直載荷作用于頂部載荷分配器,載荷分配器將載荷相對(duì)均勻地作用于滾翻保護(hù)結(jié)構(gòu)上部橫梁上,沿DLV頭部及肩部的中心平面方向,至滾翻保護(hù)結(jié)構(gòu)達(dá)到載荷要求后停止加載。
加載時(shí)的力與位移數(shù)據(jù)如圖10所示,加載后司機(jī)室變形如圖3所示。
2.3 縱向加載試驗(yàn)
垂直載荷除去后,應(yīng)對(duì)滾翻保護(hù)結(jié)構(gòu)加縱向載荷,縱向載荷應(yīng)沿DLV的縱向中心平面作用于載荷分配器,載荷分配器將載荷相對(duì)均勻地作用于滾翻保護(hù)結(jié)構(gòu),載
荷作用點(diǎn)位于上部橫向橫梁上,至滾翻保護(hù)結(jié)構(gòu)達(dá)到載荷要求后停止加載。加載時(shí)的力與位移數(shù)據(jù)如圖11所示,加載后司機(jī)室變形如圖4所示。

圖4 滾翻保護(hù)結(jié)構(gòu)縱向加載試驗(yàn)
3 裝載機(jī)ROPS 有限元仿真分析
3.1 幾何模型的創(chuàng)建及簡化
簡化掉有限元分析過程中不予考慮的部分,例如螺栓、墊圈等。由于整個(gè)駕駛室主要以板壁、薄板結(jié)構(gòu)為主,在有限元模型建立過程中部分抽取中面,建立薄壁、薄板結(jié)構(gòu)模型,如圖5所示。并建立鋼板的屬性,分別賦予相應(yīng)的中面[3]。
3.2 有限元模型
該裝載機(jī)駕駛室ROPS骨架主要由型鋼和板材焊接而成,其壁厚對(duì)承載能力與能量吸收有較大影響,因此為了增強(qiáng)原模型的抗?jié)L翻能力,對(duì)原模型中重要承載部件,8 mm的壁厚部分增加到10 mm,如圖6中4根長立柱部分。

圖5 中面形式的薄壁、薄板結(jié)構(gòu)模型
根據(jù)簡化后的薄壁、薄板結(jié)構(gòu)模型,以15~63 mm為基本尺寸的六面體單元分別劃分模型的各個(gè)部分,原來的焊縫采用捆綁連接,如圖7所示。
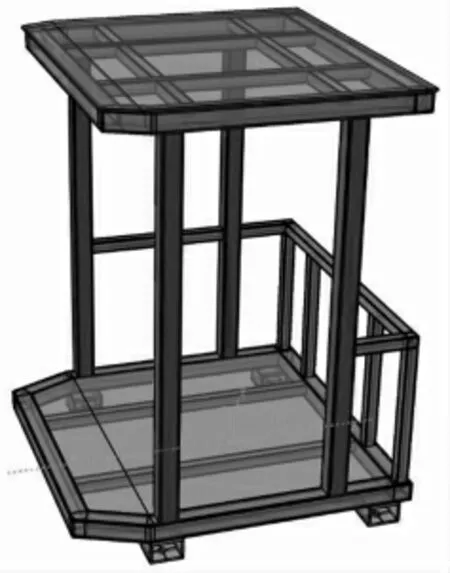
圖6 劃分好網(wǎng)格后的網(wǎng)格模型
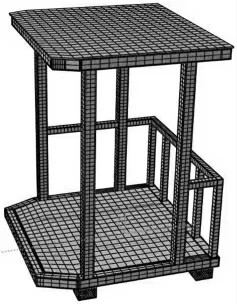
圖7 劃分好網(wǎng)格后的網(wǎng)格模型
3.3 材料參數(shù)
材料采用Q345A,其材料參數(shù)如表2等等。另外,根據(jù)工程實(shí)際的經(jīng)驗(yàn)和常用方法,將材料曲線假設(shè)為線性材料。

表2 模型材料特性
3.4 邊界條件
將駕駛室地板處與下方有螺栓連接的地方固定。在側(cè)向、垂直和縱向3個(gè)方向分別進(jìn)行校核,校核標(biāo)準(zhǔn)按表1的要求進(jìn)行計(jì)算。加載點(diǎn)用參考點(diǎn)與駕駛室分布式耦合,將載荷傳遞到駕駛室,位置參考GB/T 17922-2014。
在駕駛狀態(tài)下,頭部的高度約為1510 mm,距離頂部132 mm,頭部寬度270 mm,距離兩側(cè)分別為480 mm,肩部距離兩端分別約為358 mm,DLV相對(duì)于ROPS的后側(cè)相對(duì)位置為310 mm。側(cè)向的變形不能觸及駕駛員的頭部和肩部,豎直方向的變形不能碰到人的頭部,縱向的變形不能過大,使人向前受擠壓。
3.5 有限元分析結(jié)果
根據(jù)幾何模型建立的有限元模型,在3個(gè)方向計(jì)算駕駛室的承載能力,計(jì)算承載載荷及側(cè)向能量吸收量。然后根據(jù)要求進(jìn)行分析比較,校核駕駛室的承載性能。
3.5.1 側(cè)向加載
在分析中側(cè)向載荷與位移、載荷與能量關(guān)系曲線如圖8、圖9所示,駕駛室的變形應(yīng)力云圖如圖10所示。可見當(dāng)加載位置出現(xiàn)210.2 mm位移后,最小吸收能量為30 039 J,所吸收的能量達(dá)到標(biāo)準(zhǔn)要求的29 730 J,此時(shí)的載荷為252.8 kN,已經(jīng)超過了20 t的側(cè)向載荷要求137.8 kN;此時(shí)立柱與DLV的最小距離為270 mm,遠(yuǎn)遠(yuǎn)優(yōu)于原駕駛室的154 mm,安全性提高32.4%。
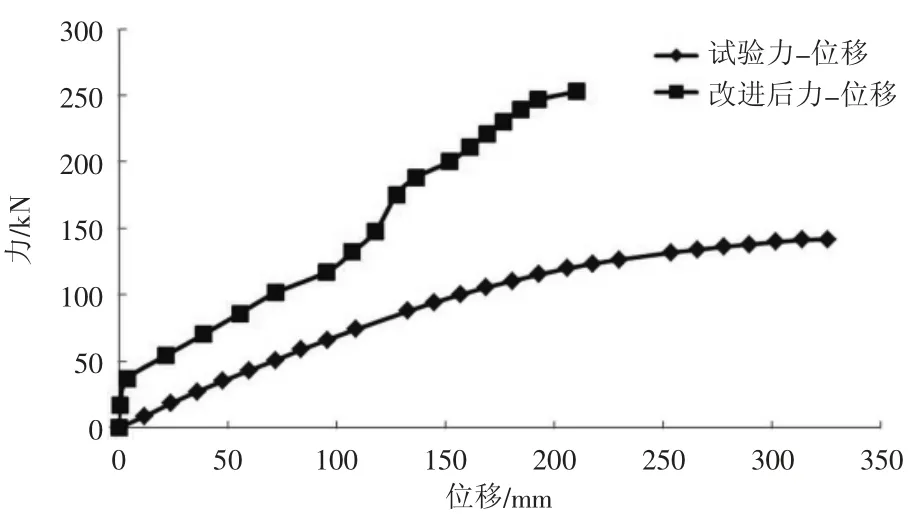
圖8 側(cè)向載荷與位移關(guān)系曲線
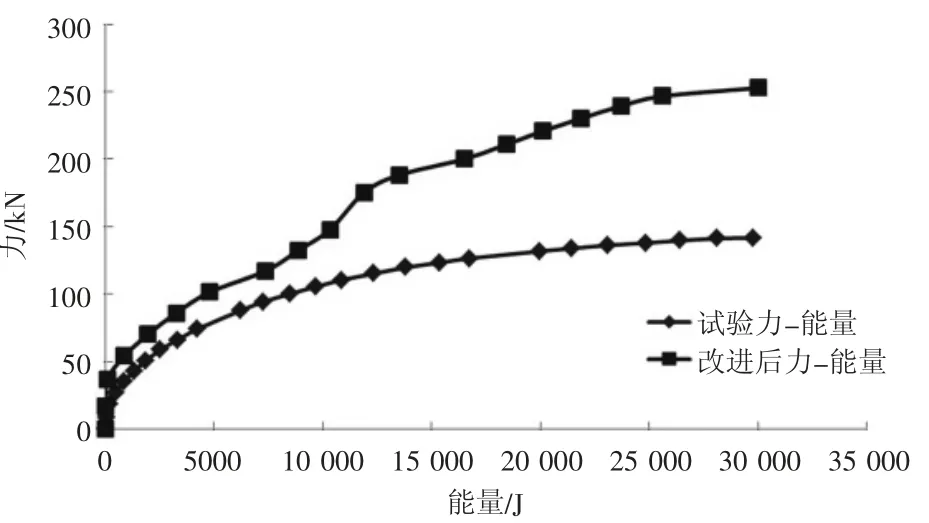
圖9 側(cè)向載荷與能量關(guān)系曲線

圖11 垂直載荷與位移關(guān)系曲線

圖12 垂直加載的變形應(yīng)力曲線

圖10 側(cè)向加載的變形應(yīng)力云圖
3.5.2 垂直加載
在分析中載荷位移關(guān)系曲線如圖11所示,駕駛室的變形應(yīng)力云圖如圖12所示。可見當(dāng)加載位置出現(xiàn)20 mm位移后,此時(shí)的載荷為393.1 kN,已經(jīng)超過了20 t的側(cè)向載荷要求392.2 kN;此時(shí)頂部與DLV的最小距離為111.7 mm,遠(yuǎn)遠(yuǎn)優(yōu)于原駕駛室的27.5 mm,安全性提高68.3%。
3.5.3 縱向加載
在分析中載荷位移關(guān)系如圖13所示,駕駛室的變形應(yīng)力云圖如圖14所示。可見當(dāng)加載位置出現(xiàn)121 mm位移時(shí),此時(shí)的載荷為110.6 kN,已經(jīng)超過了20 t的側(cè)向載荷要求110.3 kN;此時(shí)立柱與DLV的最小距離為189 mm,達(dá)到20 t要求,優(yōu)于原駕駛室的161 mm安全性提高9.0%。
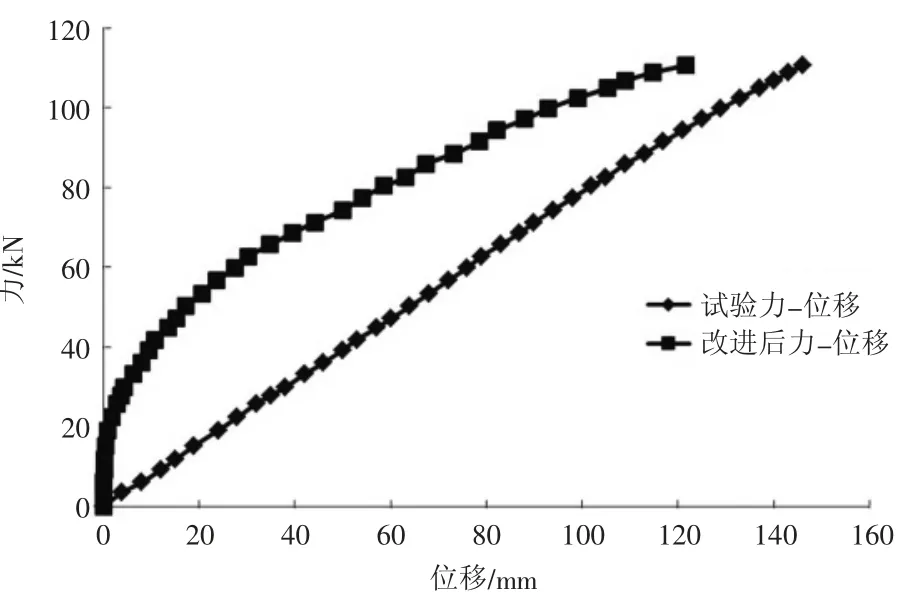
圖13 縱向載荷與位移關(guān)系曲線

圖14 縱向加載的變形應(yīng)力曲線
4 結(jié)論
本文針對(duì)一款20 t裝載機(jī)駕駛室ROPS進(jìn)行試驗(yàn)研究,駕駛室ROPS滿足國家標(biāo)準(zhǔn)規(guī)定的最小側(cè)向載荷、最小側(cè)向吸收能量、最小縱向吸收能量及最小垂直載荷的要求,但原駕駛室ROPS垂向有侵入DLV的危險(xiǎn),對(duì)其進(jìn)行了結(jié)構(gòu)改進(jìn),并進(jìn)行力學(xué)有限元仿真模擬和計(jì)算,表明試驗(yàn)階段后運(yùn)用有限元法對(duì)ROPS進(jìn)行優(yōu)化預(yù)測,側(cè)向、垂向、縱向載荷造成的位移安全性分別提高32.4%、68.3%、9.0%,強(qiáng)化駕駛室立柱能有效地改善垂向加載對(duì)DLV的威脅,駕駛室的ROPS安全性能更加明顯,為土方機(jī)械ROPS結(jié)構(gòu)的合理設(shè)計(jì)與改進(jìn)提供了參考。
猜你喜歡
哲學(xué)評(píng)論(2021年2期)2021-08-22 01:53:34
中華詩詞(2020年1期)2020-09-21 09:24:52
中華詩詞(2019年7期)2019-11-25 01:43:04
小學(xué)生作文(中高年級(jí)適用)(2018年5期)2018-06-11 01:22:56
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2017年11期)2017-04-23 07:18:00
數(shù)學(xué)大王·中高年級(jí)(2016年12期)2016-12-26 21:37:36
影視與戲劇評(píng)論(2016年0期)2016-11-23 05:26:01
現(xiàn)代企業(yè)(2015年9期)2015-02-28 18:56:50
機(jī)械工程師(2015年10期)2015-02-02 01:14:03
機(jī)電產(chǎn)品開發(fā)與創(chuàng)新(2014年4期)2014-03-11 16:42:24