基于有限元分析方法的三浮陀螺用角度傳感器優化設計
2021-05-27 06:39:04王建青黨建軍
中國慣性技術學報 2021年1期
吳 遼,王建青,黨建軍,杜 鑫,黃 銘
(西安航天精密機電研究所,西安710100)
三浮陀螺儀因其精度高、體積小、壽命長等優點在衛星、航海等領域應用廣泛。“三浮”指電機采用動壓氣浮、浮子組件采用液浮和磁懸浮。高速旋轉的電機使浮子形成陀螺效應,輸出軸在精密角度傳感器和力矩器的閉環控制下完成陀螺力矩檢測。其中角度傳感器作為三浮陀螺的核心電磁元件,主要作用是敏感陀螺浮子在進動力矩作用下沿輸出軸的微小角位移,角度傳感器性能的提升是陀螺精度提高的關鍵技術。其中動圈式角位移傳感器是常用的一種傳感器,它是靠輸出線圈相對激磁線圈之間角位移來改變它們之間的互感系數而形成輸出電壓信號。動圈式傳感器的優點為結構簡單、尺寸小,工作時無機械摩擦,壽命長,零位輸出和非靈敏區均較小,它的缺點為輸出功率小且因動圈有輸電引線會產生引線干擾力矩。
隨著慣性制導與導航技術的不斷發展,以三浮陀螺為代表的機械式陀螺儀系統復雜、開發周期長的問題越來越突出,這就對電磁元件的設計模型和分析計算方法的精確性提出了更高的要求。在產品升級、方案迭代過程,要求動圈式角度傳感器在不改變機械接口尺寸和激磁電源的情況下,靈敏度Kp提高30%,激磁電流I1變化不大于10%,零位電壓小于5 mV,非線性度優于5%。一直以來,在動圈式傳感器的設計中普遍采用場化路的計算方法,在理想條件下對磁場和磁路的情況進行了簡化和假設,比如:(1)假設工作氣隙內磁場分布均勻;(2)忽略鐵芯磁阻;(3)不考慮漏磁通的影響。因此這種計算方法不能準確反映傳感器的真實工作狀況,設計方案往往需要多輪迭代,效率較低,很難在短期之內完成產品升級的任務[1-3]。
基于有限元分析方法在電磁元件設計方面有較高的效率和準確度,建立參數化模型,在接口尺寸和電氣指標的約束下完成核心設計參數的遍歷計算,給出滿足要求的參數搭配關系,結合工藝性選擇最優的設計方案。本文首先從變壓器磁鏈方程出發推導建立了多級式動圈角度傳感器的數學模型,分析靈敏度Kp、激磁電流I1的影響因素,結合生產工藝、尺寸、電氣邊界條件確定了激磁繞組N1、輸出繞組N2、氣隙長度lg和工作半徑rp為設計變量,并給出了參數的取值范圍,借助有限元仿真軟件建立參數化模型進行設計參數遍歷計算,給出最優設計方案,并通過了實物測試考核,驗證了靈敏度Kp、激磁電流I1、零位電壓、非線性度均滿足設計輸出的要求[4-7]。
1 動圈式傳感器數學模型
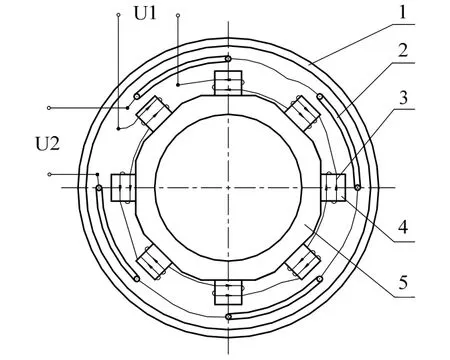
圖1 多極動圈式傳感器結構示意圖Fig.1 Structure diagram of multi-pole moving coil sensor
動圈式傳感器是基于變壓器原理進行工作的,它由定子組件和動圈組件兩部分組成。定子組件的作用是在工作氣隙中建立所需的交流磁場,它由外導磁環、內導磁環、鐵芯、激磁線圈和結構件組成。動圈組件由輸出線圈組成的繞組和相應的結構件組成,其作用是輸出與其轉動角度成一定比例關系的交流電壓信號。在三浮陀螺儀中采用的多極動圈式感應傳感器,其結構如圖1所示[7-9]。
在基于等值磁路的設計中,動圈式角度傳感器與變壓器輸出特性相類似,假設磁通φ全部被約束在鐵芯磁路中,則激磁線圈和輸出線圈內產生的感應電動勢e1和e2為:

激磁線圈的電阻壓降為i1R1,則激磁線圈和輸出線圈的電壓方程為:
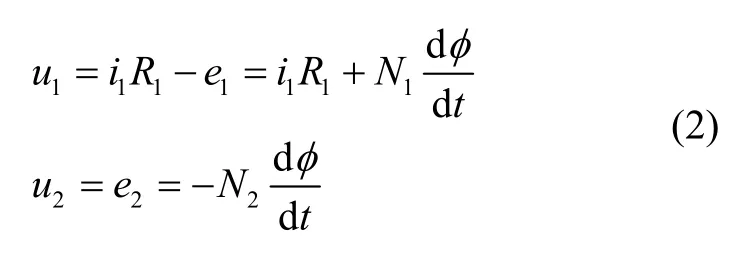
u1、u2為激磁電壓和輸出電壓的瞬態值、U1、U2為對應的有效值,N1、N2為激磁線圈和輸出線圈匝數,磁通計算關系為:
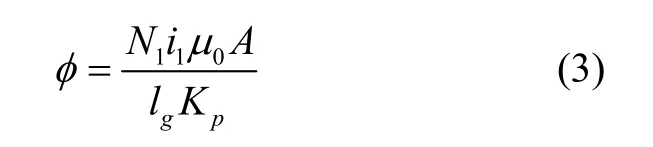
A為有效磁路面積,lg為氣隙長度,μ0為氣隙磁導率,其值為 4π×10-7H/m,考慮到電流的正弦性為激磁電流的有效值、f為激磁頻率,將式(2)代入式(3)中可得:

式(4)為常見的互感式變壓器輸出方程,但不適用于圖1所示的多極式動圈角度傳感器的輸出,主要原因為有效磁路面積計算方式不同,為了消除共模干擾,動圈式角度輸出線圈采用了串聯反接的方式,轉動角度α為零的情況下有效磁路面積A為零,傳感器無輸出。有效面積和轉動角度表達關系式為:

其中,mp為磁極數,圖1所示結構為4 極,rp為動圈有效旋轉半徑,lp為輸出線圈有效邊長。將式(5)代入式(4)即得到了動圈式角度傳感器的輸出電壓表達式為:

在已知激磁電壓U1的條件下,激磁電流I1表達式為:

式中,R1激磁繞組直流阻值,Re等效鐵損電阻,σ漏磁系數,Ag等效截面積。記傳感器的靈敏度為KP,則U2=KPα,靈敏度的計算公式為:

式(6)~式(8)即為動圈式角位移傳感器的設計估算模型。在確定激磁電源、結構尺寸、導磁材料及線圈繞組等參數條件下,一般要對傳感器的激磁電流、工作氣隙磁密、空載靈敏度、磁路飽和程度及空載相位移等電氣參數進行計算分析。由于動圈式傳感器的工作氣隙較大,傳統的設計方法難以對傳感器交流磁場的分布狀況及漏磁通的影響進行準確地分析,對激磁電流、工作氣隙磁密等參數無法進行準確計算,即式(9)的函數表達關系f1、f2、f3無法精確地得到,因此其設計誤差較大,不適于較高精度的工程設計要求[7,9-10]。

為了實現靈敏度提高30%,激磁電流變化率小于10%,零位電壓、非線性度等優于原設計方案這一設計要求,從式(8)可以看出主要的設計參數為線圈匝數N2、激磁電流I1、激磁繞組N1,這些參數之間存在相互交聯。例如,增大輸出線圈匝數N2可以提高KP,但N2的增大受到動圈窗口面積和輸出阻抗不可能太高的限制,需適當調整;增大激磁電流I1,即降低激磁線圈匝數N1,同時KP又與N1成正比,優化目標要求電流I1降低20%。由于參數之間相互交聯,無法通過公式得出最佳設計方案,需通過有限元分析方法,結合工藝情況,最終給出最佳設計方案。
2 元件優化設計
2.1 仿真參數確定與建模
通過對動圈式角度傳感器進行數學建模與分析,同時為提高仿真效率,確定以下仿真參數,并依據限制條件確定其取值范圍:其中激磁繞組N1、氣隙長度lg、工作半徑rp在其原來值的基礎上乘以系數(匝數取整),系數步長為0.05;輸出繞組N2的系數步長為0.05,因采取的實現方式不同分別計算[7]。在仿真參數設置的同時還需考慮工藝方法的可行性和繼承性,例如增加匝數優先考慮槽滿率余量,其次降低線徑。傳感器幾何模型的構建是逐級完成的,首先定義圖形參數,其次是點,最后是線,面及體是在面域創建之后自動形成,建模過程對表1 中的仿真對象進行了參數化定義。

表1 仿真參數設置Tab.1 Simulation parameter setting
參數化途徑主要有兩種:一種是結構參數化采用坐標點,在結構建模時在Geometric parameter 中完成,實現調整定子外徑、外導磁環內徑和動圈支架外徑;另外一種是電磁屬性參數化,在線圈屬性中parameter I/O 中完成,實現N1和N2繞組參數、線徑的調整。對于模型中的線圈繞組,在建模時采用了簡化處理,選擇了non meshed coil 線圈形式,提高計算效率。對于傳感器中的一些采用非金屬材料的結構件,則進行了忽略,合理地簡化了模型。所建模型的邊界條件采用Infinite Box 設置,軟件自動設置邊界條件為magnetic field tangent,所建模型如圖2。
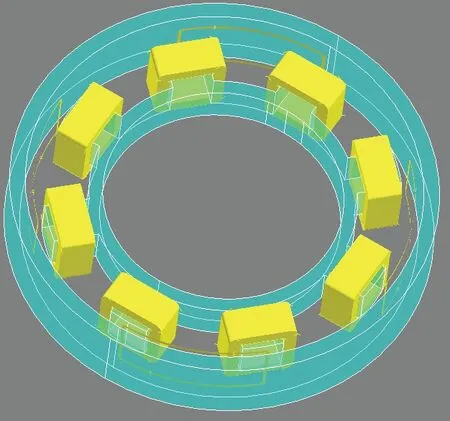
圖2 多極動圈式傳感器結構模型Fig.2 Structure model of multi-pole moving coil sensor
由于傳感器工作氣隙的磁場分布決定了傳感器的主要性能和精度,是分析的重點部分,因此相應地增加了與之有關的幾何單元的剖分節點,提高工作氣隙的剖分精確度。此外,為了減小工作氣隙的剖分差異所帶來的分析計算誤差,對傳感器8 個磁極的剖分采用mapped 設置,并應用Linked 使之相互關聯,保證磁極及其工作氣隙剖分的一致性和對稱性,盡量減小由于剖分設置而可能引起的分析計算誤差。經檢查,模型的剖分質量符合要求。
2.2 求解與數據處理
Flux 提供的求解器與具體的應用模塊有關,是個交互的求解過程,由用戶控制求解精度和時間步長。根據實際問題分析的需要選擇求解模塊,在此選擇Steady State AC Magnetic 求解模塊。參數設置如表1所示,共涉及4 組參數,其中氣隙長度lg和等效半徑Rg為結構參數、激磁繞組匝數N1和輸出繞組匝數N2為電氣設置參數,仿真的觀測量為傳感器輸出靈敏度和相位移。
八極式動圈傳感器,激磁繞組接線方式為串聯反接,瞬態極性為NNSSNNSS 分布,如圖3所示。同時通過仿真確定磁路最大磁感應強度為3 mT,出現在內導磁環同一組磁極之間位置。
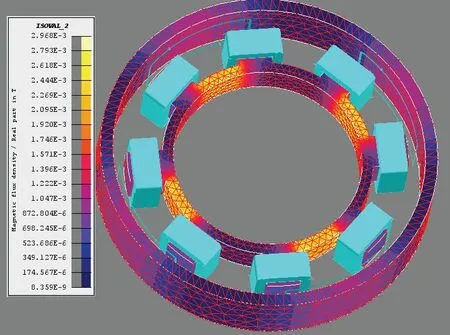
圖3 交流電磁場分布仿真Fig.3 AC electromagnetic field distribution simulation

圖4 激磁繞組和輸出繞組與靈敏度、相位移關系仿真Fig.4 Simulation results of the relationship between N1,N2 and sensitivity &phase displacement
圖4-7 給出了部分參數的仿真結果。結果表明,存在以下規律:(1)靈敏度和相位移隨著激磁繞組N1的減小而增大,隨著輸出N2的增大而增大;(2)靈敏度隨轉動半徑Rg的增大呈現先大后小的規律,且在增加值為0.21 mm 處達到最大,相位移不受Rg的影響。氣隙長度lg對靈敏度和相位移的影響較為不規律,氣隙長度減小0.84 mm 時出現奇點,奇點原因為輸出繞組過于接近磁極,而遠離氣隙中心點,導致計算誤差較大;(3)激磁電流的主要影響因素為激磁繞組N1,隨N1減小而增大。
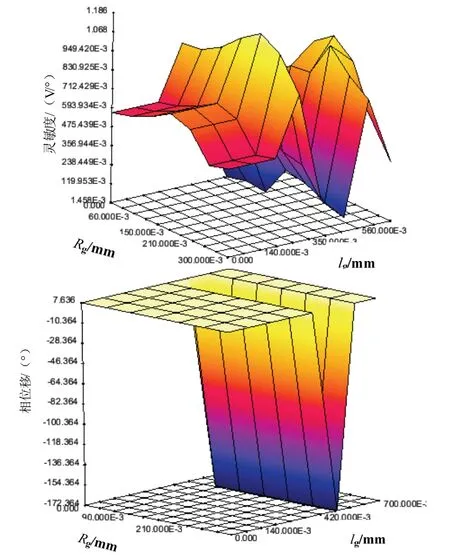
圖5 氣隙和轉動半徑與靈敏度、相位移關系仿真Fig.5 Simulation results of the relationship between Rg,lg and sensitivity &phase displacement
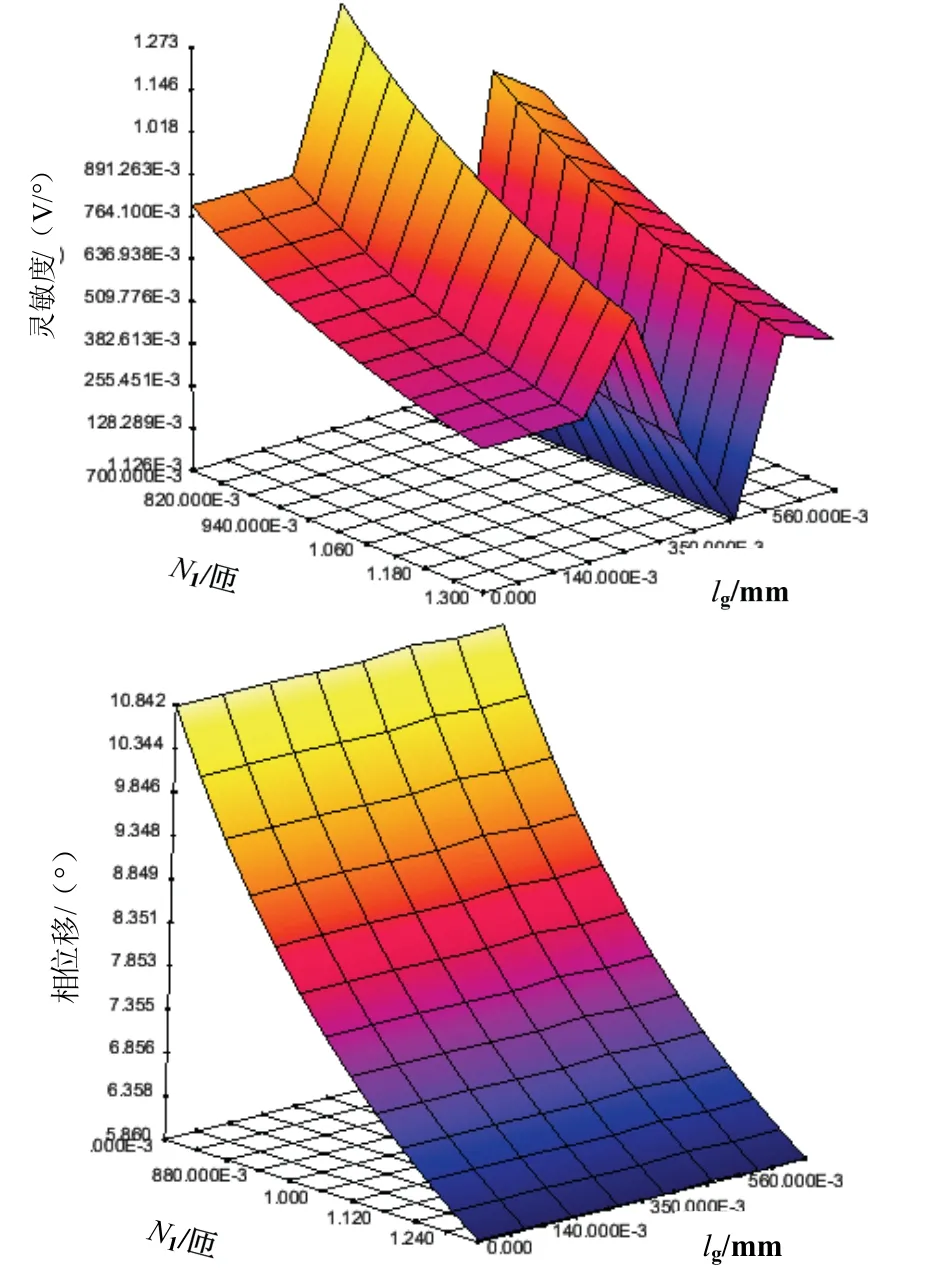
圖6 激磁繞組匝數和氣隙長度與靈敏度、相位移關系的仿真結果Fig.6 Simulation results of the relationship between N1,lg and sensitivity &phase displacement
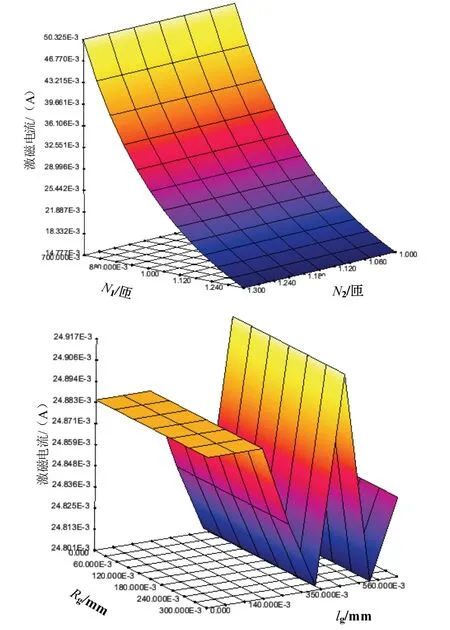
圖7 參數與激磁電流I1 影響關系的仿真結果Fig.7 Simulation results of the relationship between the parameters and the excitation current I1
依據靈敏度提高30%,激磁電流變化率小于10%條件確定最優設計方案,以原方案仿真結果為優化目標。首先原方案電流為 25 mA,電流在[27.5 mA,23.5 mA]之內的N1取值為[0.95,1.03],原方案靈敏度為560 mV/(°),目標值為728 mV/(°),N1的最優值為0.95,以此為基礎確定lg為0.1 mm、Rg為0.1 mm、N2為1.1,其計算結果為靈敏度752 mV/(°),激磁電流為27.3 mA,方案對比見表2。

表2 仿真最優設計方案Tab.2 Simulation optimal design scheme
3 實驗驗證
由于表2 給出的新的設計方案是基于動圈式角度傳感器數學建模和有限元仿真分析來的,目的在于滿足產品新的指標要求,因此需要從兩個方面進行驗證:(1)實測數據與仿真數據的符合度驗證,即數學模型、有限元模型正確性;(2)實測數據和指標要求的符合度驗證,即驗證新方案實物是否滿足指標要求,設計方案是否有效。
依據有限元仿真給出的新方案,采用相同的工藝方法生產試驗件,并完成傳感靈敏度、零位電壓、相位移、激磁電流、非線性度指標的測試。實驗共生產樣本13 件,調試結果均滿足要求,其中零位電壓、相位移、非線性度三項指標包絡對比見圖8(原方案樣本為隨機抽取的已交付合格產品,數量13 件)。
從包絡分析可以看出,新方案的零位電壓、相位移、非線性度滿足指標要求,且與原方案保持相接近的包絡范圍,這主要是因為方案仿真優化時充分考慮了工藝的可行性和繼承性。對樣本進行統計分析,并將原方案仿真與實測、新方案仿真與實測四者進行對比,結果見表3。
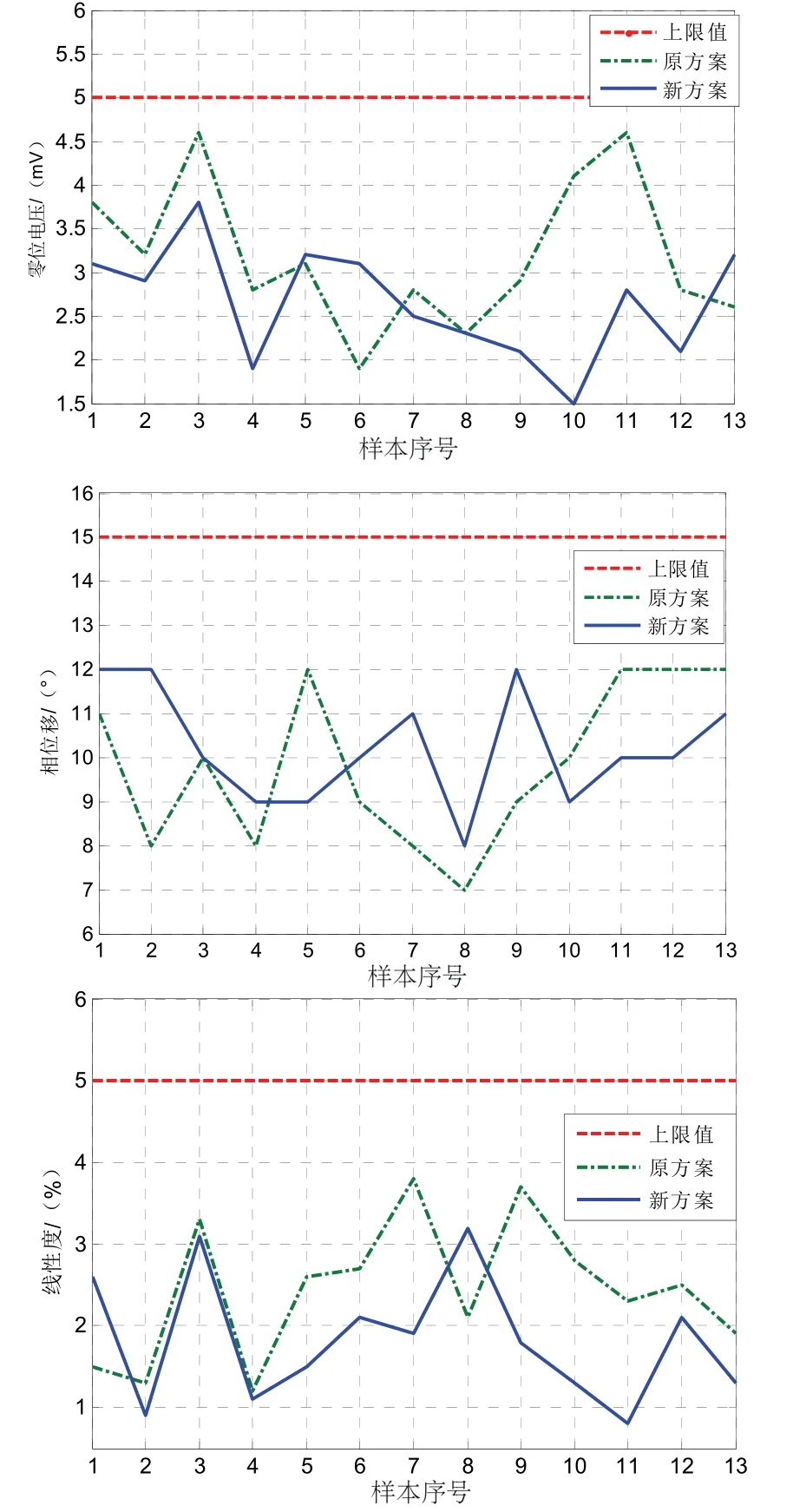
圖8 新方案與原方案實測數據對比Fig.8 Comparison of the measured data between the new original scheme and original scheme
從測試結果來看,新方案角度傳感器實測靈敏度為731 mV/(°),提高了35.8%;激磁電流26.1 mA,增大了9.2%;零位電壓3.2 mV;非線性度1.8%,即新方案在不改變機械接口尺寸和激磁電源的情況下,實現了靈敏度Kp提高30%,激磁電流I1變化不大于10%,零位電壓小于5 mV,非線性度優于5%的設計目標。

表3 仿真與實測數據比對比Tab.3 Comparison of simulation and measured data
從表3 中可以看出新方案實測結果零位電壓和相位移方面較原方案要差,零位電壓大了0.5 mV,相位移大了0.4 °,這主要是因為新方案降低激磁繞組、增大激磁電流導致元件輸入阻抗中的感抗分量減小,元件的品質因數有所下降。
另外,新方案實測結果和仿真結果之間存在一定的誤差,實測結果零位電壓高了0.7 mV、相位移高了1.9 °、靈敏度低2.8%、激磁電流低了4.4%、非線性度高了0.6 個百分點。這些誤差主要是有限元仿真時未考慮材料不均勻性、各繞組的不對性以及測試線路引入的干擾等因素,而這些因素是零位電壓、相位移、非線性度的主要誤差源。同時,Flux 中的non meshed coil 是一種理想的集中繞組模型,與實際的繞組存在一定的誤差,繞組內外孔越接近誤差越小。實測結果和仿真結果對比可以看出,仿真誤差在可接受范圍內,論文所建的數學模型和有限元仿真模型是正確的,有一定的工程意義。
4 結論
高精度浮子角度感知是三浮陀螺儀實現高精度目標的重要技術路徑,在方案升級中要求在不改變角度傳感器機械接口尺寸的前提下提高靈敏度,且激磁電流、零位電壓、相位移控制在一定的合理范圍。由于傳統電磁計算方法在動圈式角度傳感器計算中存在較大誤差,設計驗證周期較長。本文從變壓器磁鏈方程出發,推導建立了適合于動圈式角度傳感器的靈敏度、激磁電流數學模型,結合設計目標對模型進行分析,確定了激磁繞組、輸出繞組、氣隙長度和轉動半徑為設計切入點,采用有限元仿真技術,建立參數化模型,通過仿真給出新的設計方案。實驗數據表明新的設計方案使角度傳感器靈敏度提高了35.8%,激磁電流變化控制在9.1%,零位電壓3.2 mV,非線性度1.8%,實現了靈敏度Kp提高30%,激磁電流I1變化不大于10%,零位電壓小于5 mV,非線性度優于5%的設計目標。同時仿真數據與實驗結果在可接受誤差范圍內,證明論文提出的基于有限元分析方法的三浮陀螺用角度傳感器優化設計方法有效。