基于AR建模的組合導航系統漸變故障雙閾值檢測方法
2021-05-27 06:39:20胡柏青戴永彬高端陽
中國慣性技術學報 2021年1期
呂 旭,胡柏青,戴永彬,高端陽
(1.海軍工程大學 電氣工程學院,武漢430033;2.遼寧工業大學 電氣工程學院,錦州121001)
捷聯慣性導航系統(Strapdown Inertial Navigation System,SINS)具有較好的自主性和隱蔽性,能夠連續提供多種導航參數,頻帶寬,抗干擾好,但其誤差隨時間不斷累積[1,2]。相反,全球衛星導航系統(Global Navigation Satellite System,GNSS)的測速和定位精度高,且基本不受地域、時間限制,但導航的精度和可靠性與載體的運動和信號的通透性有關,且抗干擾能力差,信息的更新率低[3]。基于兩者優勢互補,目前,使SINS/GNSS 組合導航的應用越來越廣泛[4]。SINS具有較高的可靠性,故障率較低。一旦GNSS 系統發生故障,經濾波信息融合后,將導致組合導航系統整體受污染,輸出信息精度降低,可靠性得不到保障,甚至難以定位。因此,及時有效地檢測組合導航系統的信息故障,提高組合導航系統的可靠性,開發故障檢測和隔離方法是非常必要的。
容錯設計的出發點就是從系統的整體設計來提高其可靠性,通過系統檢測發現故障。目前,在已有的組合導航系統級故障檢測方法中,狀態χ2和殘差χ2檢驗法最為常用[5,6]。這兩種方法分別通過構造狀態或殘差信息統計量,根據服從的概率統計分布來判斷組合導航系統中是否出現故障,具有不需要確定故障的具體原因的特點[7]。但是這兩種方法也存在一些不足,其中狀態χ2檢驗法,由于狀態更新導致系統誤差累積,故障檢測靈敏度降低,而且計算相對復雜[8]。與狀態χ2檢驗法比較,殘差χ2檢測法算法簡單,實時性更好。但是該方法通常對突變故障有效檢測,針對漸變故障檢測效果不佳,甚至失效[9]。因此,故障檢測靈敏度和準確率在組合導航實際應用過程中都得不到保障。
針對上述問題,諸多學者進行了相關理論探討與研究。文獻[10]采用殘差χ2檢測方法構造新息調節因子,自適應修正量測噪聲協方差矩陣,但是該方法對漸變故障檢測的效果較差,在一定程度上算法性能受限。文獻[11]采用雙狀態χ2檢測方法,雖然該方法通過切換狀態遞推器避免了漸變故障“跟蹤”的問題,但是該方法對故障的檢測缺少一定的準確性,針對小幅值故障并未進行有效檢測,且狀態遞推反復切換也會增加系統誤差的產生。文獻[12]通過狀態χ2檢驗法和殘差χ2檢驗法相互配合,提高系統信息故障檢測的準確性,但難以兼顧實時性,并且漸變故障的檢測效果不佳。近幾年,隨著機器學習的發展,神經網絡[13]和支持向量機[14,15]等故障檢測方法也相應提出,但是以上方法均需要大量的數據訓練搭建模型,或是構建新的統計量,計算量大且很難兼顧好實時性。因此,為了解決組合導航系統中漸變故障檢測以及檢測靈敏度降低問題,研究一種新的故障檢測方法及控制策略具有重要理論意義和實踐價值。
綜上,本文結合系統的物理特性,從實際角度出發,提出了一種基于AR建模的組合導航系統漸變故障雙閾值檢測方法。通過建立無故障條件下靜態或運動觀測數據的AR 模型,結合卡爾曼濾波框架得到量測預報值進行殘差計算,自適應調節濾波增益矩陣,降低檢測統計量“跟蹤”故障問題;在此基礎上搭建雙閾值檢測門限,針對小幅值故障,采用該雙閾值門限進行分類處理,降低了漏警率對數據可靠性的影響。本文所提出方法應用到SINS/GNSS 組合導航系統中,通過仿真實驗分析,驗證該方法對漸變故障檢測的有效性。
1 殘差 χ 2檢驗法性能分析
殘差χ2檢驗法中,殘差即是系統實際量測值與量測估計值的差,通過構造殘差檢測函數判斷是否服從已知期望和方差高斯分布,對系統故障進行實時有效檢測。考慮常用帶故障的離散系統動態模型:
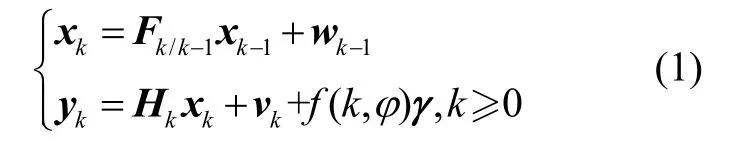
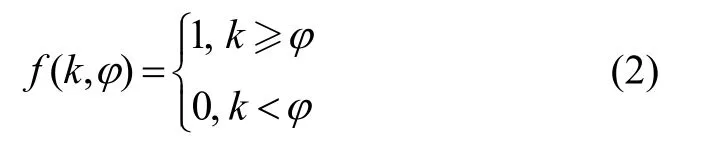
式中,φ為故障發生的時間。
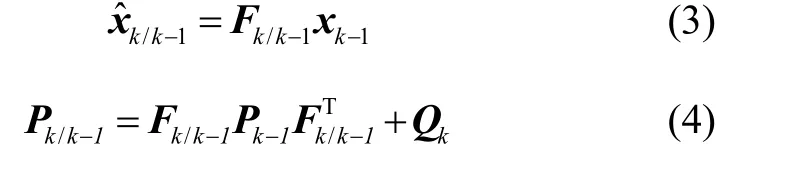
量測預測值為:

量測殘差向量可表示為:

式中,rk表示殘差,即量測值與量測預測值的差值,通常也稱為“新息”。
可以證明,在無故障時,根據卡爾曼濾波假設推導可知,殘差rk是服從零均值高斯白噪聲分布,其方差為:


由新息統計特性可知,λk~χ2(m)服從自由度m的χ2分布,其中m為量測yk的維數。判定系統是否發生故障的二元假定依據為:1)H0:λk≥TD認定系統發生故障;2)H1:λk﹤TD認定系統正常工作。TD為預設檢測門限,該門限與誤警率相關,設α為誤警率,存在;設β為漏警率,則有,且滿足式(9)[16]。

式中,κ為檢驗函數的非中心化參數,定義如下:

此時閾值與漏警率確定的最小可檢測誤差為:

誤警率與漏警率[17]的關系如圖1所示。
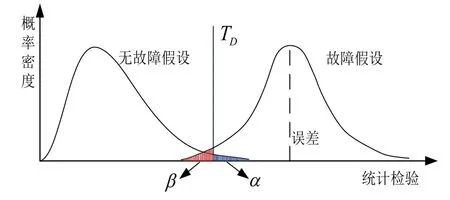
圖1 誤檢率與漏檢率之間的關系Fig.1 Relationship between probability of false alert and missed detection
殘差χ2檢驗,判定系統信息故障與否的關鍵是由殘差所得檢測函數值是否超過預先設置的門限。殘差χ2檢驗對于突變故障檢測十分有效。針對漸變故障問題,顯然有很多不足。由圖1 可知,檢測閾值TD的選擇需要在誤警率與漏警率之間折中。而且,漏警率的大小與最小檢測誤差具有直接關系。當故障值大于最小檢測誤差時,故障越容易被檢測,漏警率小;反之,檢測不到系統故障信息,導致誤警率大。
2 AR 量測建模輔助的故障檢測方法
該方法通過時間序列分析中AR 方法對組合導航系統中的量測信息建立自回歸模型,得到非“跟蹤”信息故障輸出的系統量測預報值,構造雙閾值檢測門限提高數據質量,進而提高了殘差χ2檢驗法對組合導航系統漸變故障的檢測靈敏度及準確性。
2.1 AR 量測建模
自回歸模型(Autoregressive Model,簡稱AR 模型)是一種時間序列分析方法,利用組合導航系統量測歷史數據,通過建立無故障條件下量測預報值的AR模型,可以得到基于AR建模的量測預報與樣本空間的前若干時刻量測均相關,當漸變故障發生時,受到故障的影響較小,不會“跟蹤”故障輸出,所得殘差rk值較大,因而對于漸變故障能夠進行有效地檢測。以SINS/GNSS 組合導航系統速度量測為例,連續采集系統在靜止和運動時的速度量測數據,證明無論是靜態還是動態情況,速度量測的序列均具有明顯的自相關性。根據SINS/GNSS 組合導航系統速度量測特性,采用AR 模型來描述和預測SINS/GNSS組合導航系統速度量測的變化規律。

式中,ψ1,ψ2…ψp為自回歸系數,P為AR 模型的階數,εt為零均值高斯白噪聲。
將向量Xt轉化為標量后,可得AR(p)模型[18]。

式中,自回歸系數ψ1,ψ2…ψp由序列自協方差函數γ1,γ2…γp通過Yule-Walker 方程(14)唯一確定。
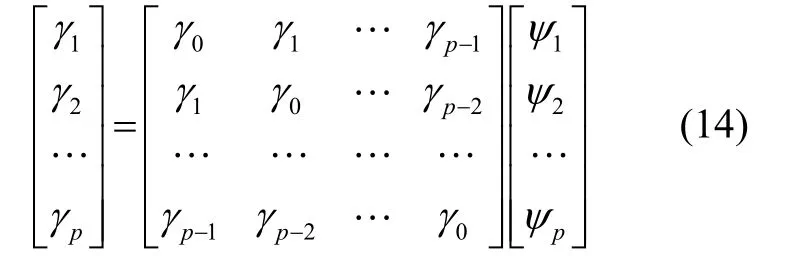
式中,εt高斯白噪聲方差σ2為:

采用上述方法估計出AR 模型的參數,得到各階次的模型。但是,需要事先確定模型的階數,通過一些準則來比較并選出最適合的模型。模型階次選擇,通過Akaike 信息準則選取,簡稱為AIC 準則[19]。當用AR(p)進行量測建模時,可得,其與階次p的函數關系如式(16)。

式中,p+1為待估計參數個數,包括自回歸系數ψ1,ψ2…ψp和隨機誤差的方差σ2。N為序列個數。當第二項中階次p增加時,模型的極大似然函數單調下降,當模型階數增加至p0值時,AIC(p0)達到極小,此時p0為模型最優階次。
2.2 基于AR 量測建模的雙閾值故障檢測法
殘差χ2檢測法因其對突變故障檢測效果良好被廣泛應用,但是殘差χ2檢測法對漸變故障的檢測不是十分有效,如對故障敏感度低、檢測效果差、容易漏檢等。這是由于漸變故障開始很小,不易被檢測,有故障輸出將會影響狀態一步預測,使它“跟蹤”故障輸出,導致殘差持續較小,因此很難應用傳統方法發現故障。針對這一問題,在結合AR 建模優勢基礎上,采用雙閾值故障檢測,提高系統的可靠性。
傳統殘差χ2檢測法單一門限的設定,很難在誤警率與漏警率之間進行折中,二者不可兼顧。所以,本文采用雙閾值方法,設定大小閾值對故障是否發生進行檢測。判定系統是否發生故障的假定依據為:1)認定系統發生故障;2)認定系統正常工作;3)認定系統被干擾。TD1和TD2為預設檢測大小門限,誤警率為α1和α2。通過以上分布式處理,提高系統對小幅值漸變故障的檢測質量。
采用AR 量測建模的雙閾值故障檢測系統,具體檢測流程如下:

步驟2:結合式(5)(6)得到基于AR量測建模的k時刻殘差:


步驟4:求得系統故障檢測函數為:


式中,N為殘差序列窗口長度,通過可求得新的卡爾曼濾波增益矩陣為:

式(22)對濾波增益起到了自適應調節的作用,由于AR 量測建模的預報值受故障“跟蹤”影響較小,以至于求取的新息協方差矩陣較大,因為與濾波增益負相關,在一定程度上提高了系統對小幅值故障的敏感性和算法精度。
3 仿真實驗驗證
3.1 SINS/GNSS 組合導航系統模型
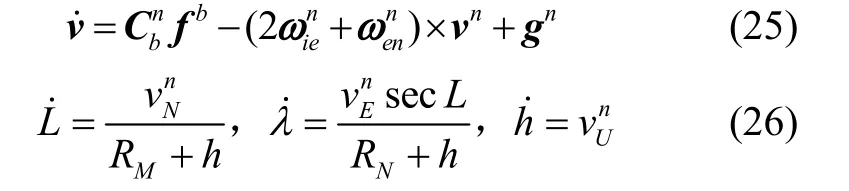
本文通過SINS 和GNSS 對載體運動進行參數測量,建立SINS/GNSS 直接式松組合導航模型。系統狀態方程采用慣導基本方程,量測方程采用GNSS 輸出的速度信息作為輔助校正。通過UKF 方法進行信息融合,定義載體系為b 系,慣性系為i 系,導航系為n系,地理系為e 系。SINS 基本微分方程具體如下[20]。


比力方程和位置微分方程具體如下:
量測模型采用速度量測,量測方程為:

3.2 仿真實驗分析
為了驗證所提的AR 建模雙閾值故障檢測法的有效性,與傳統殘差χ2檢測法以及雙閾值殘差χ2檢測法進行對比。仿真實驗模擬車輛運動,仿真時間為500 s。初始位置為北緯34.246 °,東經108.909 °,記錄其運動參數。其中GNSS 位置誤差為10 m,輸出頻率1 Hz,SINS 更新頻率為10 Hz。由于在SINS/GNSS組合導航中使用了速度松組合的配置,濾波器在沒有GNSS 信息輸出時執行狀態更新。初始航向誤差為1 °;陀螺儀常值漂移為0.1 °/h,隨機游走系數為0.01 °/h;加速度計零偏為100μg,隨機游走系數為。如圖2所示的運動軌跡。
為模擬真實使用環境,現假設SINS 系統可靠,GNSS 系統發生故障,設置故障條件主要包含三種情況。情況1:無故障情況對比;情況2:GNSS 東向速度在200 s-280 s 加入突變故障離群值;情況3:GNSS東向速度測量在200 s-280 s 加入(0.6 ×(t-200))/10的漸變故障。AR 量測預報的時間序列建模點跡數目為200 個,故障告警的條件設置為檢測統計函數連續5 s超過閾值,而連續5 s 低于檢測閾值視為故障結束。設置故障檢測的誤警率為α1=0.6和α2=0.2,則有門限TD1=6.21和TD2=3.83。為了驗證本文所提方法的有效性,分別在情況1 無故障條件、情況2 突變故障條件和情況3 漸變故障條件下,對比傳統殘差χ2故障檢測方法(M1)、改進的雙閾值殘差χ2故障檢測方法(M2)以及本文所提出的基于AR建模的雙閾值殘差χ2故障檢測方法(M3)三種檢測方法的檢測性能。M1 方法:當傳統卡方檢測到報警時,為了提升系統的容錯能力,期間故障隔離,采用只進行慣導狀態更新,直至故障檢測結束重新加入量測更新。M2 方法:改進的雙閾值殘差χ2故障檢測方法,當檢測量位于雙閾值之間時,進行自適應調節濾波增益方法進行容錯;當故障檢測量超過門限TD1時,處理方法同情況1。M3 方法:情況3 處理方法同情況2 處理方法。
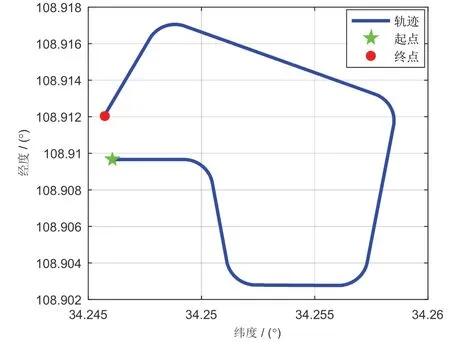
圖2 仿真軌跡Fig.2 The simulation trajectory
在對AR 模型進行識別時,根據其樣本偏自相關的系數的截尾步數,可得AR 模型階數p,根據AIC 準則使AIC(p0)達到極小,AIC 值隨階數變化情況如圖3所示。
從圖3 可知,當階數p<4 時,AIC 值變化幅度較大;當p>6 時,AIC 值隨著階數的增加而緩變減少;當階數達到10 時候,AIC 值基本不變,但是相應計算量也會增加。因此,選擇適合的階數是提高AR 模型性能的前提依據,最終確定階次不宜過高為6 階。得到AR 量測建模的參數為:ψ1=1.1775,ψ2=0.2669,ψ3=-0.2136,ψ4=-0.1905,ψ5=-0.0408,ψ6=-0.0033。
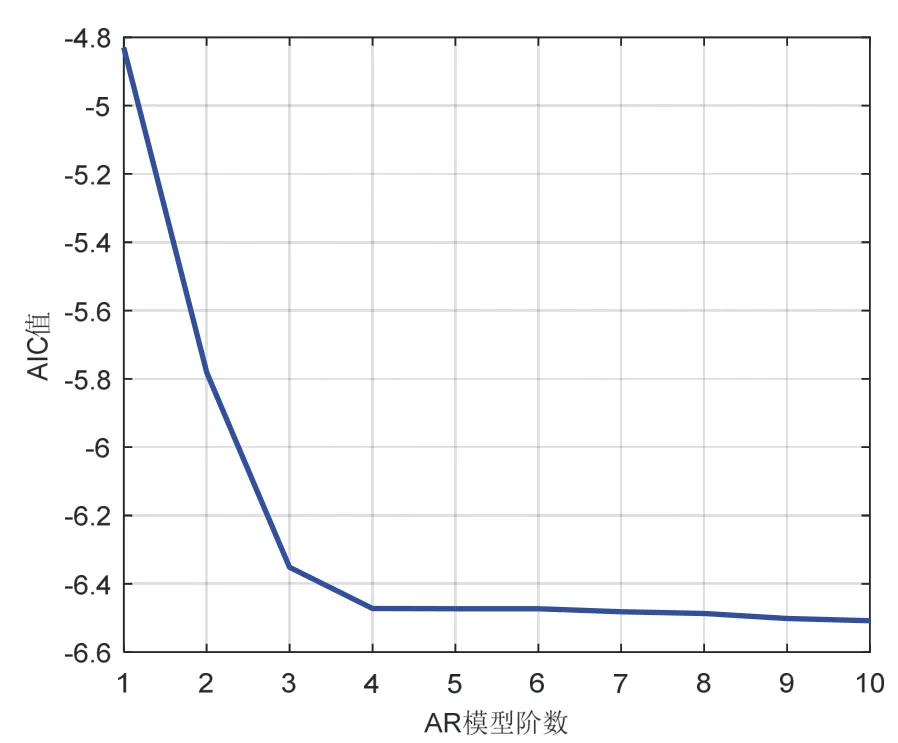
圖3 AIC 值隨階數變化圖Fig.3 Variation of AIC value with order number
情況1 系統無故障發生條件下,比較本文所提及三種故障檢測法性能,如圖4-6所示。
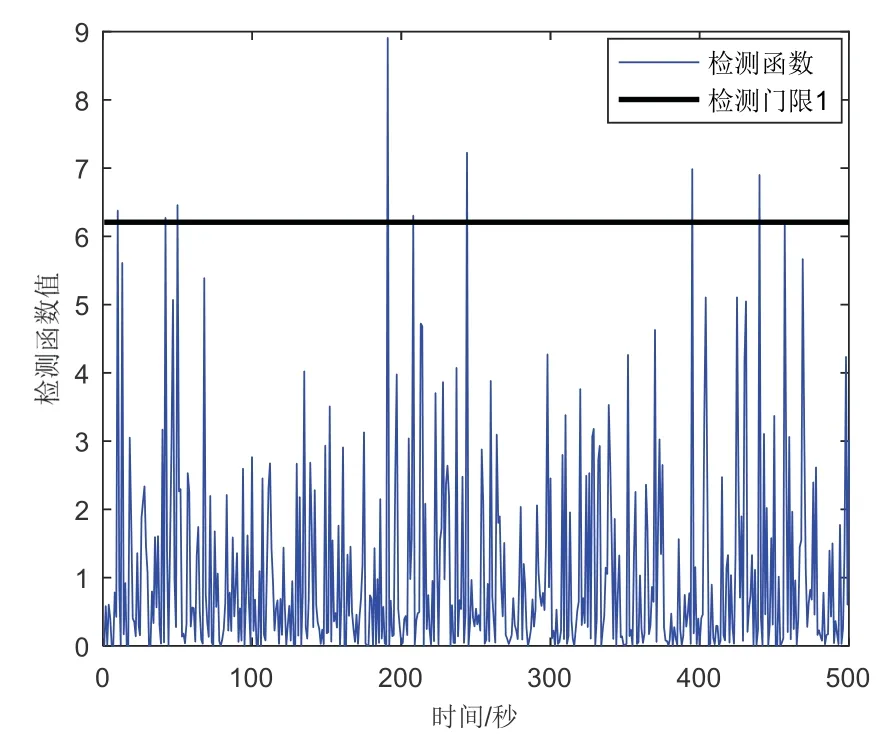
圖4 情況1 下殘差χ 2檢驗Fig.4 The residualχ 2test under case 1
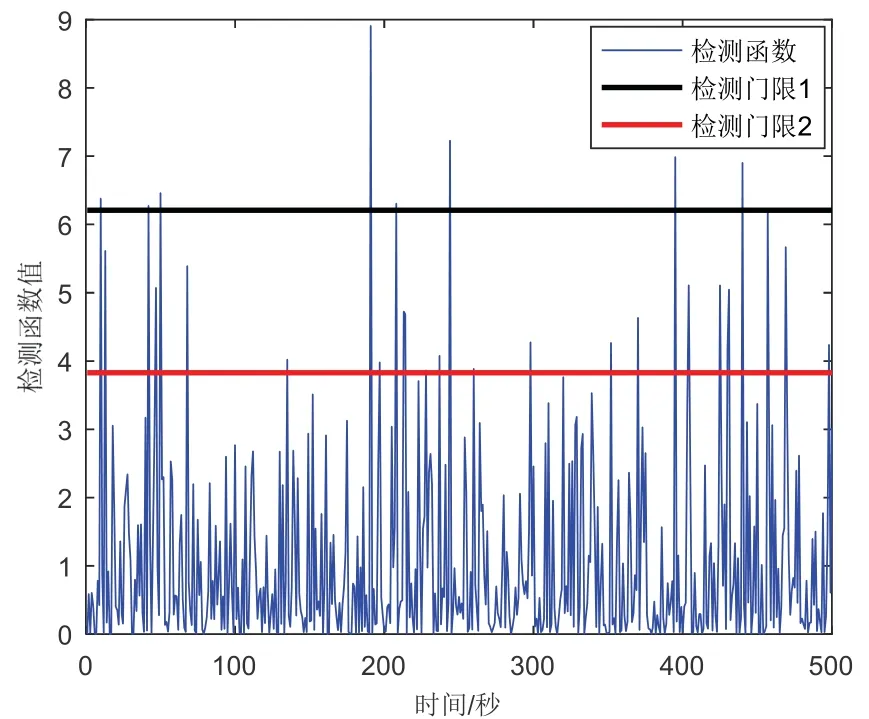
圖5 情況1 雙閾值殘差χ 2檢驗Fig.5 The double threshold residualχ 2test under case 1
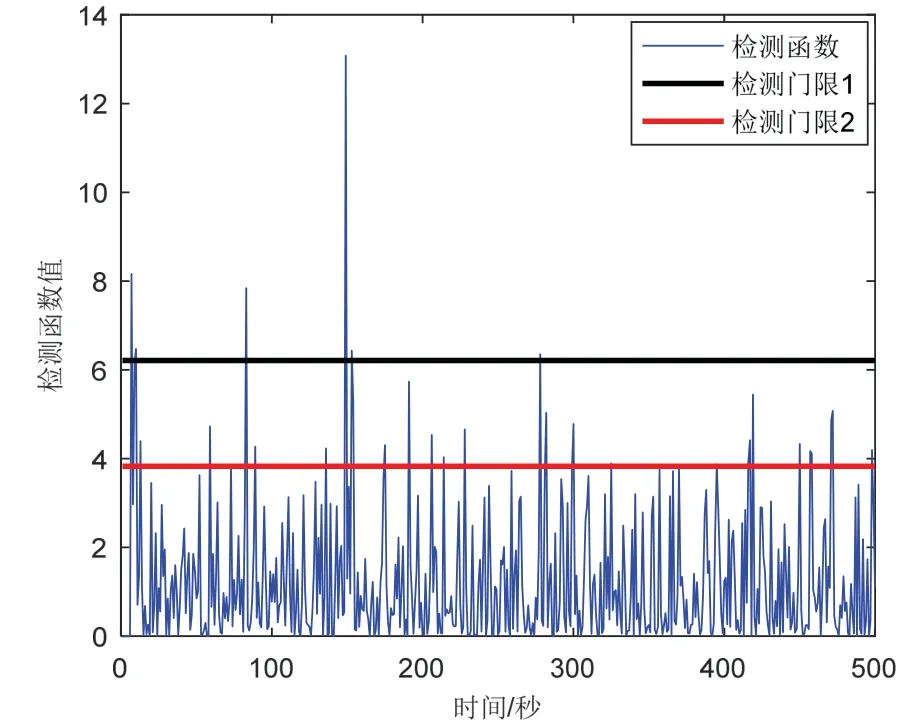
圖6 情況1 AR 建模的殘差χ 2檢驗Fig.6 The residualsχ 2test for AR modeling under case 1
由圖4-6 可知,三種故障檢測方法在無故障條件下,均未觸發報警功能,檢測效果相當。但是,相比于傳統的殘差χ2故障檢測方法以及改進后的雙閾值殘差χ2檢測方法,本文提出的AR 建模的組合導航系統漸變故障雙閾值檢測方法,檢測統計量相對均衡穩定,且幅值較小,說明本文所提出的方法得到的量測建模數據更為準確。
情況2,當系統突變故障發生時,比較本文所提及三種故障檢測法性能如圖7-9所示。可知,當系統在200 s-280 s 時間段內發生突變故障時,本文提及的三種故障檢測方法對突變故障的檢測靈敏度均較高,但是傳統殘差χ2檢測法由于量測污染“跟蹤”故障,在212 s 和268 s 之間出現漏檢現象。改進的殘差雙閾值χ2檢測方法出現漏檢現象時能進行自適應調整,緩解漏檢問題。
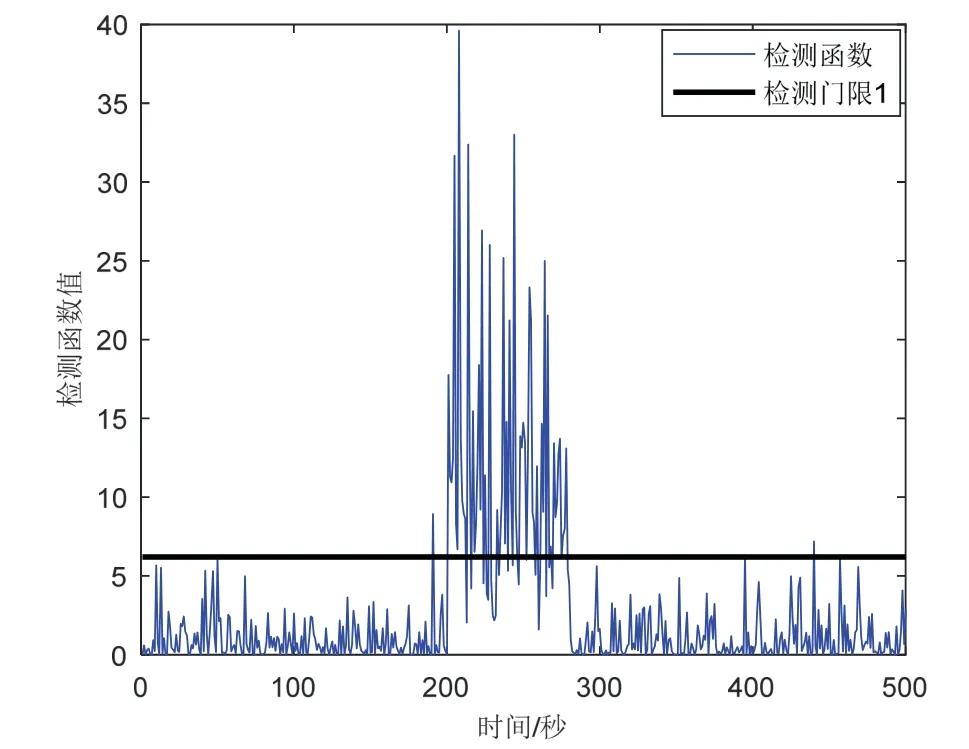
圖7 情況2 殘差χ 2檢驗Fig.7 The residualχ 2test under case 2
本文所提出的故障檢測方法,有效避免了量測“跟蹤”故障問題,對于組合導航系統突變故障有效檢測的準確性能有所改進。特別是,由于三種算法針對突變故障檢測靈敏度一致,雙閾值自適應調節策略對于突變故障的處理效果不顯著。但是,當故障檢測統計量大于檢測閾值時,將進行故障隔離,組合導航只進行狀態更新,直至檢測到故障結束后再進行量測更新。相應三種方法的容錯效果基本一致。
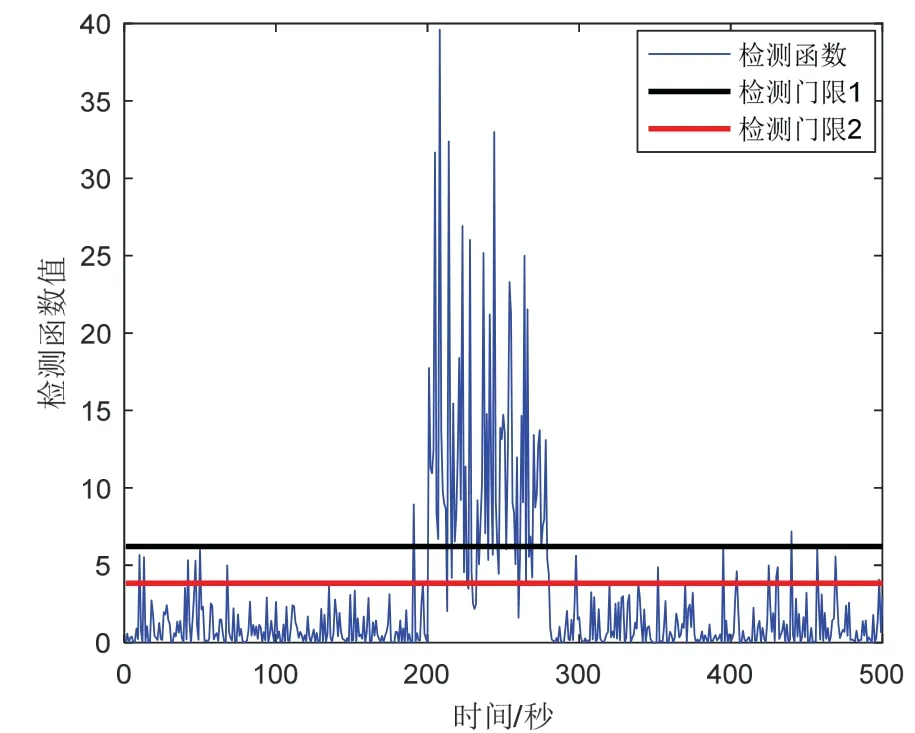
圖8 情況2 雙閾值殘差χ 2檢驗Fig.8 The double threshold residualχ 2test under case 2
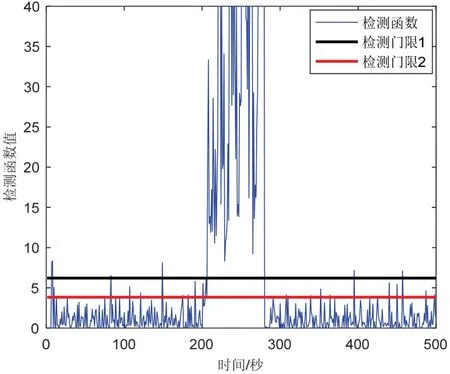
圖9 情況2 AR 建模的殘差χ 2檢驗Fig.9 The residualsχ 2test for AR modeling under case 2
情況3,當系統漸變故障發生時,比較本文所提及三種故障檢測法性能如圖10-12所示。
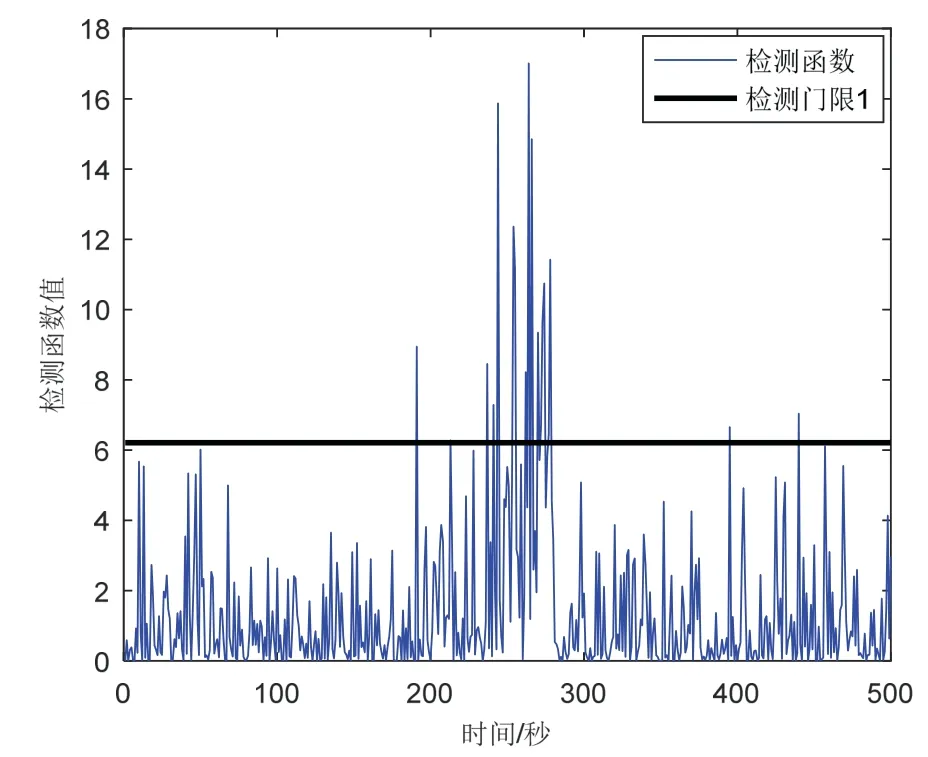
圖10 情況3 殘差χ 2檢驗Fig.10 The residualχ 2test under case 3
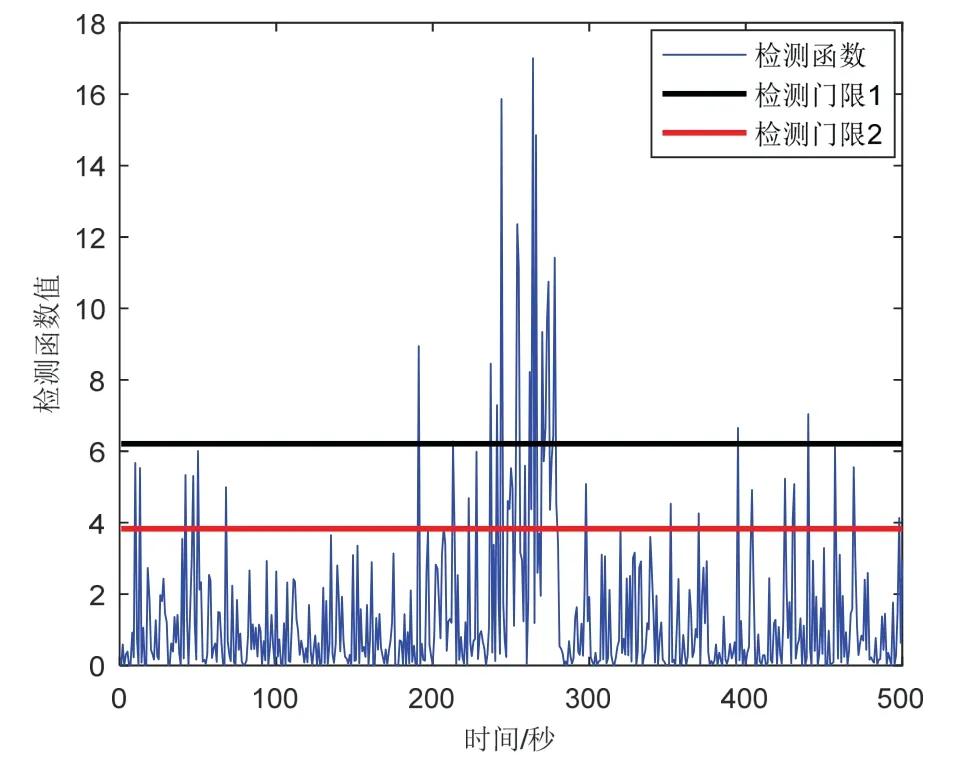
圖11 情況3 雙閾值殘差χ 2檢驗Fig.11 The double threshold residualχ 2test under case 3
從圖10-11 可知,傳統的殘差χ2檢測法和改進的雙閾值殘差χ2檢測法,由于漸變故障“跟蹤”原因,導致最終的檢測統計量效果并不明顯。殘差數據因受到量測信息引入故障,通過卡爾曼濾波框架導致“跟蹤”故障變化較小,始終無法達到告警條件,因而無法及時檢測出系統漸變故障,出現了漏檢的現象。

圖12 情況3 AR 建模的殘差χ 2檢驗Fig.12 The residualsχ 2test for AR modeling under case 3
由圖12 可知,對于小幅值漸變故障,相比于傳統方法,本文方法采用AR 量測建模策略,有效避免了“跟蹤”故障對系統檢測的影響,具有更好的檢測效率。
為進一步說明本文所提方法的有效性,分析三種故障檢測方法,對組合導航系統發生漸變故障時的整體穩定性的影響。以東向速度誤差為例進行分析。圖13 為未進行故障檢測及隔離、傳統方法隔離、改進的傳統方法及本文所提方法的組合導航系統東向速度誤差曲線。
從圖13 中可以看出,在系統漸變故障發生期間,傳統故障檢測方法在未進行故障隔離的情況下,系統在260 s 時東向速度誤差達到最大值0.6 m/s 左右。經故障隔離后的傳統的方法容錯性能較差。基于雙閾值的改進殘差χ2檢測法,在一定程度上將誤警率與漏警率之間的檢測信息進行了自適應容錯處理,系統故障檢測性能有所提高。但是,由于以上方法均通過卡爾曼濾波框架,導致系統“跟蹤”故障,最終檢測效果不明顯。相比而言,本文所提出的基于AR建模的組合導航系統漸變故障雙閾值檢測法,通過建立無故障條件下觀測數據的AR 模型,結合卡爾曼濾波模型得到量測預報值進行殘差計算,減少了系統“跟蹤”故障的發生;在此基礎上搭建雙閾值檢測門限,對誤警率與漏警率之間的受污染的觀測數據,采用該雙閾值門限進行分類處理,自適應調節濾波增益矩陣,降低了漏警率對數據可靠性的影響。圖中四條曲線所對應的東向速度均方誤差MSE 為0.0901 m/s、0.0877 m/s、0.0822 m/s 和0.0666 m/s,顯然本文所提方法東向速度誤差受“跟蹤”故障影響較小,驗證了該方法的有效性。
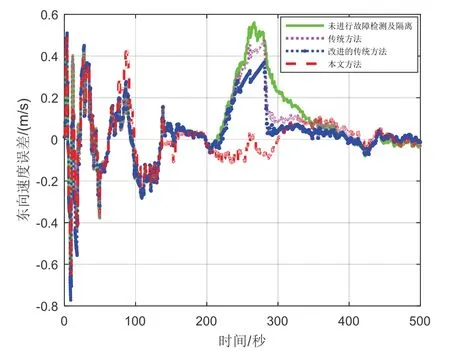
圖13 東向速度誤差對比Fig.13 The comparison of east velocity
表1 列出了本文所提及的三種故障檢測方法的檢測性能對比。我們從表中可知,本文提出的基于AR建模的雙閾值組合導航漸變故障檢測方法,對比傳統的殘差χ2故障檢測法和改進的殘差χ2檢測法,檢測漏警率降低69%以上,整體濾波精度可提高19%以上,能夠以較高的靈敏度及時檢測到漸變故障并進行容錯和隔離。證明了該方法在檢測漸變故障時的優越性。
為了進一步充分驗證本文所提方法的有效性,繼續減小漸變故障的幅值,當故障大小為(0.6 ×(t-200))/20時,基于AR 建模雙閾值故障檢測法的檢驗效果如圖14所示。從圖14 中可以看出,針對小量漸變故障信息的檢測,同樣及時有效,檢測延時32 s,漏警時長25 s。故障檢測結果較好,驗證了本文所提算法的有效性。
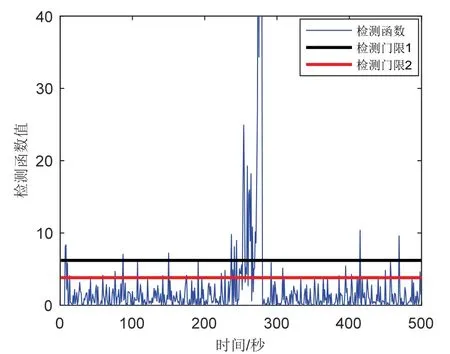
圖14 AR 建模的殘差χ 2檢驗Fig.14 The residualsχ 2test for AR modeling
4 結論
在組合導航系統故障檢測過程中,針對組合導航系統漸變故障發生情況,本文提出了一種基于AR建模的組合導航漸變故障雙閾值檢測方法。該方法通過AR 量測建模,降低了量測污染分布導致的系統“跟蹤”故障問題的發生,提高了系統的檢測靈敏度。搭建雙閾值檢測門限,降低了漏警率對數據可靠性的影響。仿真試驗結果表明,該方法針對無故障條件、突變故障條件情況下的檢測效果仍然有效,特別是針對系統漸變故障發生時,有效提高了故障檢測靈敏度和準確性,驗證所提算法的有效性,對于組合導航系統故障檢測及容錯處理具有一定的參考價值。
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
汽車維修與保養(2019年7期)2020-01-06 03:30:42
意林原創版(2016年10期)2016-11-25 10:28:30
汽車維護與修理(2016年10期)2016-07-10 08:17:41
海峽科技與產業(2016年3期)2016-05-17 04:32:12
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56