基于動(dòng)壓約束的高超聲速飛行器機(jī)動(dòng)突防制導(dǎo)策略
2021-05-27 06:39:10李新三汪立新劉潔瑜
中國(guó)慣性技術(shù)學(xué)報(bào) 2021年1期
羅 哲,李新三,汪立新,劉潔瑜,沈 強(qiáng),薛 亮
(火箭軍工程大學(xué)導(dǎo)彈工程學(xué)院,西安 710025)
高超聲速飛行器具有良好的氣動(dòng)外形,飛行速度一般大于5 Ma,一類(lèi)高超聲速飛行器是以吸氣式發(fā)動(dòng)機(jī)為動(dòng)力,另一類(lèi)通常采用助推-滑翔方式。高超聲速飛行器可以在很寬的空域內(nèi)機(jī)動(dòng)飛行,具有響應(yīng)速度快、機(jī)動(dòng)能力強(qiáng)等特點(diǎn),能夠?qū)θ蚧虺h(yuǎn)程目標(biāo)實(shí)施快速精確打擊。高超聲速飛行器必然對(duì)未來(lái)戰(zhàn)爭(zhēng)的作戰(zhàn)模式產(chǎn)生深遠(yuǎn)影響,發(fā)展高超聲速技術(shù)已經(jīng)成為世界各國(guó)戰(zhàn)略安全的重要保證。
隨著彈道導(dǎo)彈防御體系的不斷發(fā)展和完善,傳統(tǒng)的彈道導(dǎo)彈成功突防面臨的挑戰(zhàn)越來(lái)越嚴(yán)峻。與傳統(tǒng)的彈道導(dǎo)彈相比,高超聲速飛行器具有更強(qiáng)的機(jī)動(dòng)能力,而如何提高高超聲速飛行器的突防能力已引起國(guó)內(nèi)外專(zhuān)家學(xué)者的關(guān)注[1,2]。當(dāng)前得以應(yīng)用的突防手段主要包括:隱身、電子對(duì)抗、程序機(jī)動(dòng)等技術(shù)。高超聲速飛行器通過(guò)機(jī)動(dòng)飛行既可以增加反導(dǎo)系統(tǒng)對(duì)其飛行軌跡的預(yù)測(cè)難度,也可以躲避攔截彈的攔截。目前,比較成熟的程序機(jī)動(dòng)模式主要包括:S 形機(jī)動(dòng)、擺動(dòng)式機(jī)動(dòng)、螺旋機(jī)動(dòng)和跳躍機(jī)動(dòng)等[3,4]。針對(duì)程序機(jī)動(dòng)方法,相關(guān)專(zhuān)家已開(kāi)始有針對(duì)性地改進(jìn)攔截導(dǎo)彈的攔截制導(dǎo)律。為了彌補(bǔ)程序機(jī)動(dòng)的不足,國(guó)內(nèi)外學(xué)者運(yùn)用最優(yōu)理論、智能算法和微分對(duì)策理論等方法對(duì)飛行器的機(jī)動(dòng)突防制導(dǎo)方法進(jìn)行改進(jìn)[5-10]。
不同于已有的機(jī)動(dòng)突防制導(dǎo)方法,本文針對(duì)高超聲速飛行器臨近空間機(jī)動(dòng)突防制導(dǎo)問(wèn)題,基于模型預(yù)測(cè)靜態(tài)規(guī)劃(Model Predictive Static Programming,MPSP)制導(dǎo)方法[11,12],提出一種基于最低動(dòng)壓約束(Dynamic Pressure Constraint,DPC)的高超聲速飛行器非程序自主機(jī)動(dòng)制導(dǎo)策略。高超聲速飛行器根據(jù)戰(zhàn)場(chǎng)態(tài)勢(shì)規(guī)劃臨近空間航路點(diǎn),對(duì)臨近空間航路點(diǎn)處的動(dòng)壓進(jìn)行約束,通過(guò)航路點(diǎn)處動(dòng)壓約束在線(xiàn)調(diào)節(jié)臨近空間飛行軌跡的形狀,實(shí)現(xiàn)高超聲速飛行器臨近空間自主非程序大空域機(jī)動(dòng)飛行。本文采用基于動(dòng)壓約束非程序機(jī)動(dòng)突防策略主要從以下幾個(gè)方面綜合考慮:第一,高超聲速飛行器采用氣動(dòng)操縱方式在臨近空間機(jī)動(dòng)飛行時(shí),須滿(mǎn)足氣動(dòng)操縱所需的最低動(dòng)壓約束條件;第二,恒定的動(dòng)壓條件下,推進(jìn)系統(tǒng)的工作性能比較穩(wěn)定;第三,對(duì)臨近空間航路點(diǎn)處動(dòng)壓進(jìn)行實(shí)時(shí)調(diào)節(jié),根據(jù)戰(zhàn)場(chǎng)攻防態(tài)勢(shì)實(shí)時(shí)改變臨近空間飛行軌跡的形狀,增強(qiáng)高超聲速飛行器的自主機(jī)動(dòng)突防能力。
MPSP 制導(dǎo)方法是由印度學(xué)者Padhi 等人[11,12]提出來(lái)的。該方法采用靜態(tài)協(xié)態(tài)變量求解最優(yōu)控制問(wèn)題,算法的實(shí)時(shí)性較好,已廣泛用于解決高超聲速飛行器制導(dǎo)控制問(wèn)題[13,14]。本文主要從以下三個(gè)方面對(duì)MPSP 制導(dǎo)方法進(jìn)行改進(jìn):第一,末端時(shí)刻輸出量考慮末端時(shí)刻時(shí)間偏差的影響;第二,性能指標(biāo)函數(shù)中考慮控制量輸入約束的影響;第三,同時(shí)考慮多個(gè)航路點(diǎn)約束以及末端約束,已有的MPSP 制導(dǎo)方法只能解決帶末端約束的制導(dǎo)問(wèn)題。采用改進(jìn)后的MPSP 制導(dǎo)方法對(duì)高超聲速飛行器臨近空間飛行航路點(diǎn)處的動(dòng)壓進(jìn)行約束,在實(shí)現(xiàn)飛行器臨近空間大空域機(jī)動(dòng)飛行的同時(shí),滿(mǎn)足氣動(dòng)操縱所需的最低動(dòng)壓條件和推進(jìn)系統(tǒng)穩(wěn)定工作條件。
1 MPSP 制導(dǎo)方法
對(duì)于一般形式的非線(xiàn)性系統(tǒng),其離散形式的狀態(tài)方程和輸出方程如下:

其中,

取如下性能泛函:


第k步更新的控制指令為:

其中,
2 控制量輸入受限MPSP 制導(dǎo)方法
傳統(tǒng)的MPSP 制導(dǎo)方法沒(méi)有考慮末端時(shí)刻時(shí)間偏差對(duì)末端時(shí)刻輸出量的影響,也沒(méi)有考慮控制指令輸入約束的影響,本節(jié)對(duì)MPSP 制導(dǎo)方法進(jìn)行改進(jìn),推導(dǎo)得到考慮末端時(shí)刻時(shí)間偏差和控制指令輸入受限時(shí)的MPSP 制導(dǎo)方法。
2.1 考慮末端時(shí)刻時(shí)間偏差
考慮末端時(shí)刻時(shí)間偏差ftΔ 的影響,末端時(shí)刻輸 出量偏差泰勒級(jí)數(shù)展開(kāi)后忽略高階項(xiàng)影響,有:

考慮如下性能泛函:

2.2 控制量約束處理
考慮以下形式控制指令不等式約束條件:

式(12)(13)和式(15)構(gòu)成了一個(gè)靜態(tài)優(yōu)化問(wèn)題。考慮控制指令約束,廣義性能泛函為:
2.3 控制指令求解
運(yùn)用最優(yōu)化理論,可以分別得到式(18)(19)和(20):
由式(18)得:
由式(19)得:

將式(21)(22)代入式(12),得:
式(23)可寫(xiě)成如下形式:

其中,
由式(24)得:

結(jié)合式(22)和式(27),可得末端時(shí)刻時(shí)間偏差表達(dá)式:

更新后的飛行時(shí)間為:

更新后的控制指令為:

式(29)(30)分別作為更新后的飛行時(shí)間和控制指令,飛行時(shí)間和控制量均為閉環(huán)形式。通過(guò)調(diào)節(jié)性能泛函中的權(quán)值系數(shù)、權(quán)值矩陣和控制指令系數(shù),實(shí)現(xiàn)調(diào)節(jié)不同時(shí)刻控制指令的幅值。
改進(jìn)后的MPSP 制導(dǎo)方法適用于求解帶末端約束的制導(dǎo)問(wèn)題,本文接下來(lái)對(duì)MPSP 制導(dǎo)方法進(jìn)行擴(kuò)展,解決高超聲速飛行器臨近空間帶多個(gè)航路點(diǎn)處動(dòng)壓約束和末端輸出量約束條件下的制導(dǎo)律設(shè)計(jì)問(wèn)題。
3 帶多個(gè)航路點(diǎn)約束擴(kuò)展MPSP 制導(dǎo)方法
3.1 擴(kuò)展MPSP 制導(dǎo)問(wèn)題描述
帶航路點(diǎn)約束MPSP 制導(dǎo)問(wèn)題的離散形式可以描述如下:
性能泛函:

3.2 擴(kuò)展MPSP 控制指令求解
考慮末端時(shí)刻時(shí)間偏差,各個(gè)航路點(diǎn)對(duì)應(yīng)的輸出量偏差方程為:

將式(33)代入式(32),得:
其中,
式(34)即為第i個(gè)航路點(diǎn)對(duì)應(yīng)的輸出量偏差方程。結(jié)合式(31)和(34),運(yùn)用最優(yōu)控制指令即可得到更新后的飛行時(shí)間和控制指令:

其中,
3.3 最低動(dòng)壓約束機(jī)動(dòng)突防策略
運(yùn)用帶多個(gè)航路點(diǎn)約束擴(kuò)展MPSP 制導(dǎo)方法,設(shè)計(jì)基于最低動(dòng)壓約束的高超聲速飛行器非程序自主機(jī)動(dòng)突防策略。根據(jù)戰(zhàn)場(chǎng)態(tài)勢(shì)規(guī)劃臨近空間航路點(diǎn),對(duì)航路點(diǎn)處的動(dòng)壓進(jìn)行約束調(diào)節(jié)飛行軌跡的形狀,實(shí)現(xiàn)高超聲速飛行器臨近空間大空域機(jī)動(dòng)飛行。
選擇如下形式各航路點(diǎn)處輸出量:

4 仿真分析
飛行器運(yùn)動(dòng)方程參照文獻(xiàn)[12],表1、表2 和表3分別為N1、N2和N3各航路點(diǎn)處的約束條件,DPC1、DPC2 和DPC3 代表三種不同動(dòng)壓條件。

表1 DPC1 約束條件Tab.1 DPC1 constraints
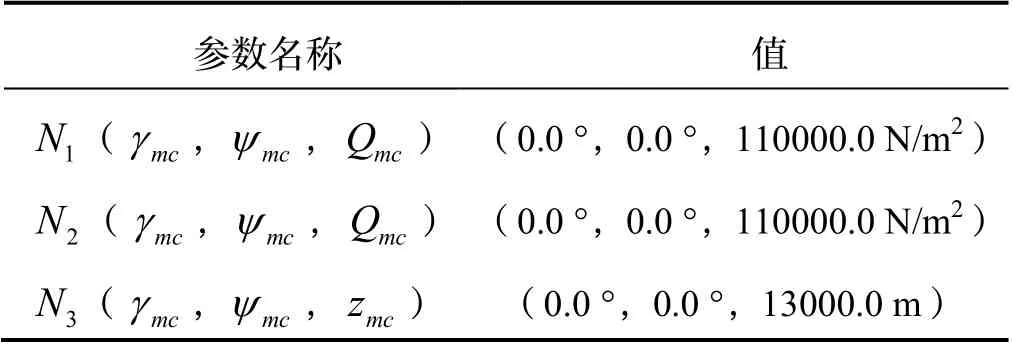
表2 DPC2 約束條件Tab.2 DPC2 constraints
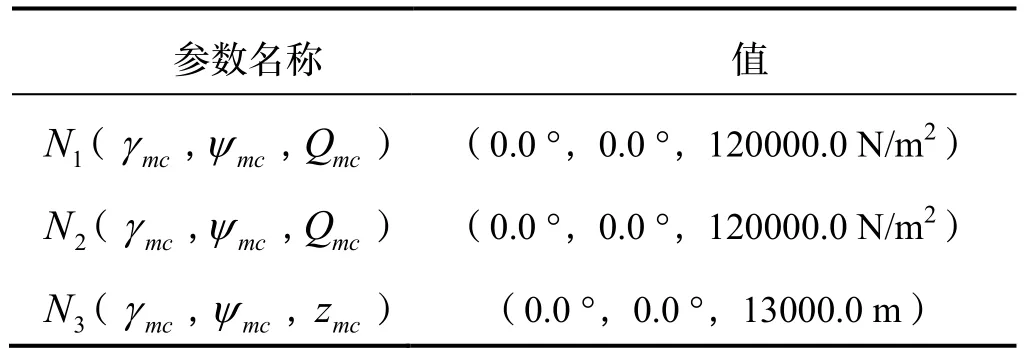
表3 DPC3 約束條件Tab.3 DPC3 constraints
采用比例制導(dǎo)給出控制量初始值,制導(dǎo)方法迭代次數(shù)為4。表4、表5 和表6 分別為各航路點(diǎn)處狀態(tài)值,圖1 為動(dòng)壓的變化曲線(xiàn),仿真結(jié)果表明DPC1、DPC2 和DPC3 軌跡約束條件下,高超聲速飛行器在航路點(diǎn)和上滿(mǎn)足動(dòng)壓約束值,動(dòng)壓偏差在1.0 N/m2范圍內(nèi)。圖1表明在1N和2N之間動(dòng)壓變化范圍比較小,有利于推進(jìn)系統(tǒng)穩(wěn)定工作。法向加速度指令和位移一直保持為零,這里沒(méi)有給出變化曲線(xiàn)。圖2-6 為DPC1、DPC2 和DPC3 軌跡約束條件下,法向加速度指令、速度彈道傾角和位移變化曲線(xiàn)圖。仿真表明:各航路點(diǎn)之間法向加速度指令變化平緩,加速度指令的最大值在約束值范圍內(nèi)。表4、表5 和表6 還表明:各航路點(diǎn)處航跡傾角實(shí)際值和期望值之間的偏差均在0.1 °范圍內(nèi),各航路點(diǎn)處高度偏差均在1.0 m 范圍內(nèi),即本文提出帶航路點(diǎn)約束的MPSP 制導(dǎo)方法具有很高的制導(dǎo)精度。對(duì)比分析圖1 和圖6,在航路點(diǎn)和處對(duì)動(dòng)壓進(jìn)行了約束,DPC1 軌跡對(duì)應(yīng)的航路點(diǎn)動(dòng)壓值約束最低,飛行器的飛行高度最高。反之,DPC3 軌跡對(duì)應(yīng)的飛行高度最低。假設(shè)DPC1 軌跡對(duì)應(yīng)的動(dòng)壓值為氣動(dòng)操縱的最低動(dòng)壓條件和推進(jìn)系統(tǒng)穩(wěn)定工作的動(dòng)壓條件,此時(shí)高超聲速飛行器在臨近空間可以達(dá)到最大的飛行高度,飛行器在臨近空間縱向平面的機(jī)動(dòng)范圍最大,DPC1 軌跡對(duì)應(yīng)的動(dòng)壓值即為高超聲速飛行器臨近空間大空域機(jī)動(dòng)動(dòng)壓約束條件。
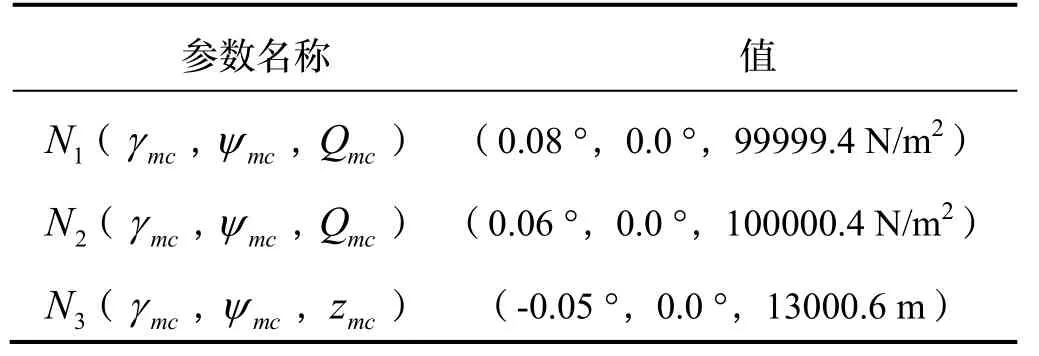
表4 DPC1 航路點(diǎn)狀態(tài)值Tab.4 DPC1 state value
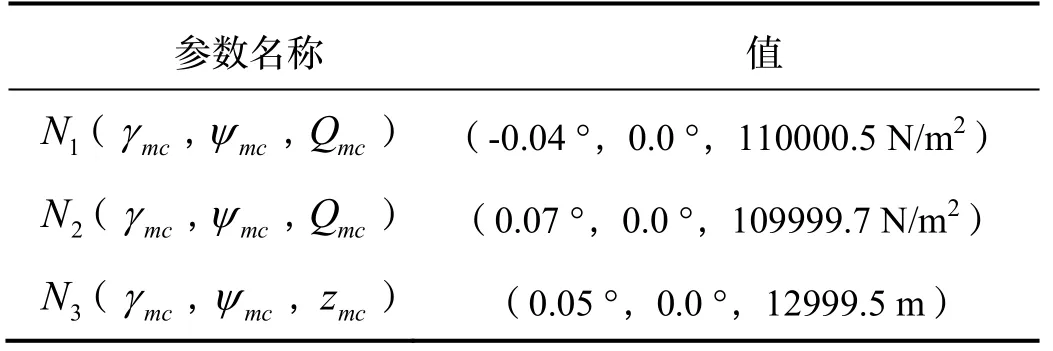
表5 DPC2 航路點(diǎn)狀態(tài)值Tab.5 DPC2 state value
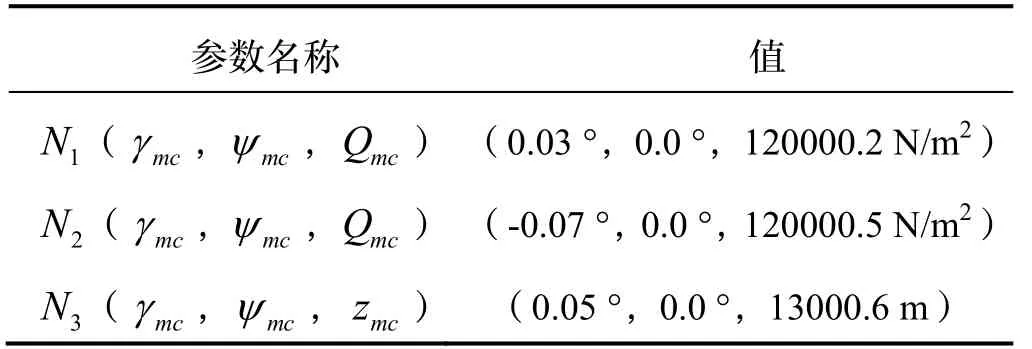
表6 DPC3 航路點(diǎn)狀態(tài)值Tab.6 DPC3 state value
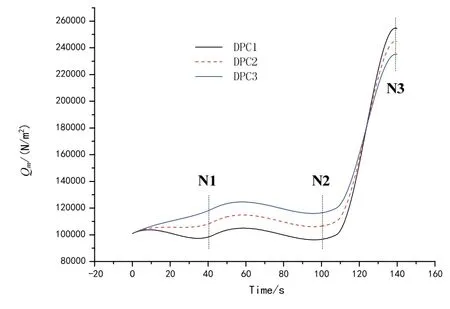
圖1 動(dòng)壓變化曲線(xiàn)Fig.1 Dynamic pressurehistories

圖2 法向加速度指令變化曲線(xiàn)Fig.2 Normal accelerationhistories
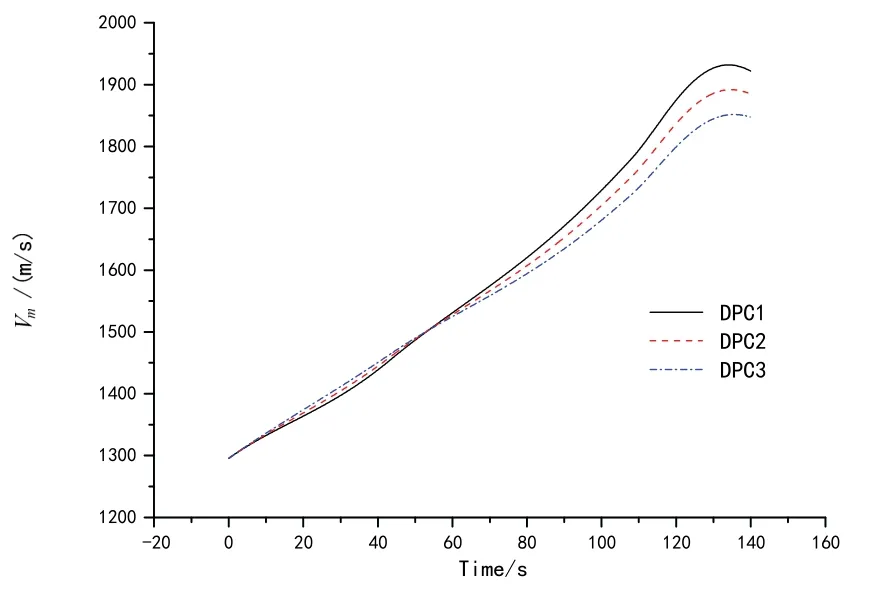
圖3 速度變化曲線(xiàn)Fig.3 Velocityhistories
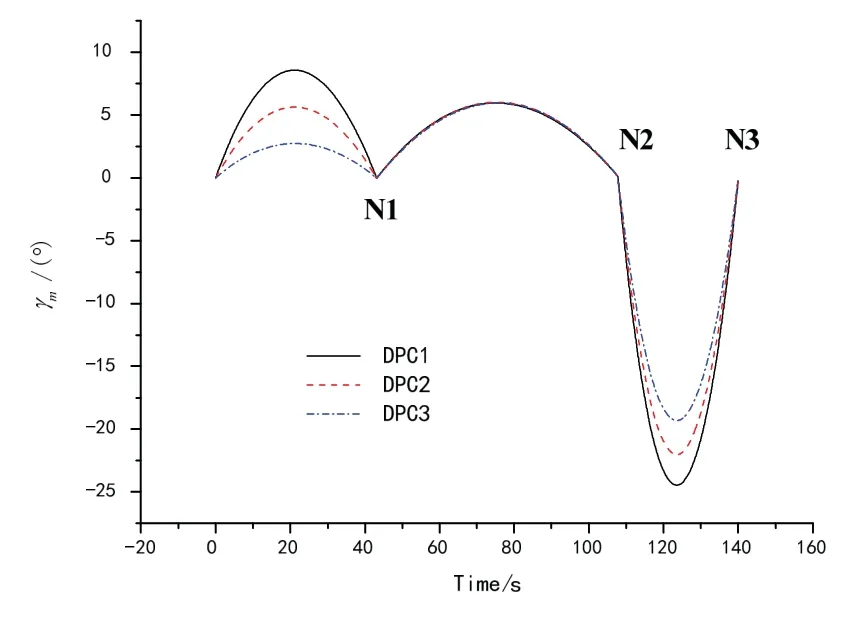
圖4 彈道傾角變化曲線(xiàn)Fig.4 Flight path anglehistories
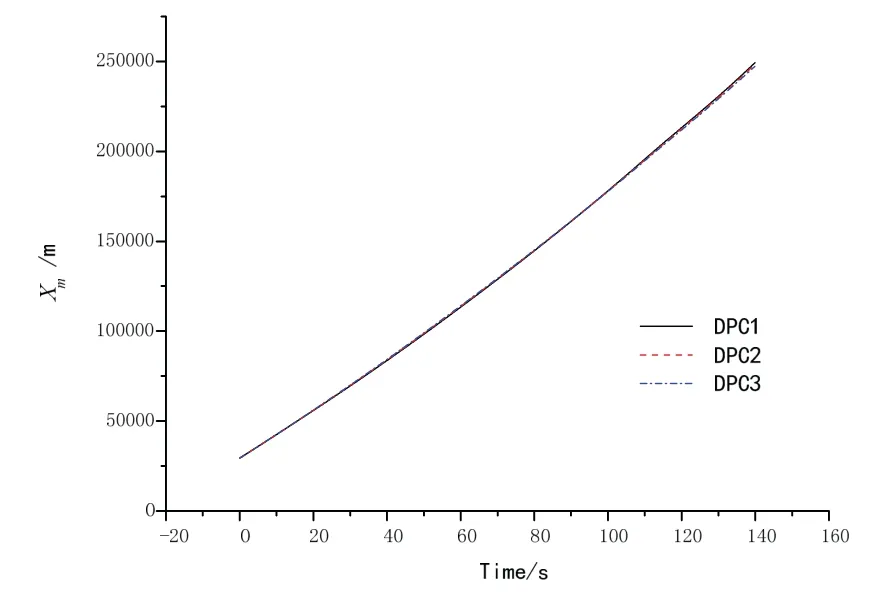
圖5 位移變化曲線(xiàn)Fig.5 Positionhistories
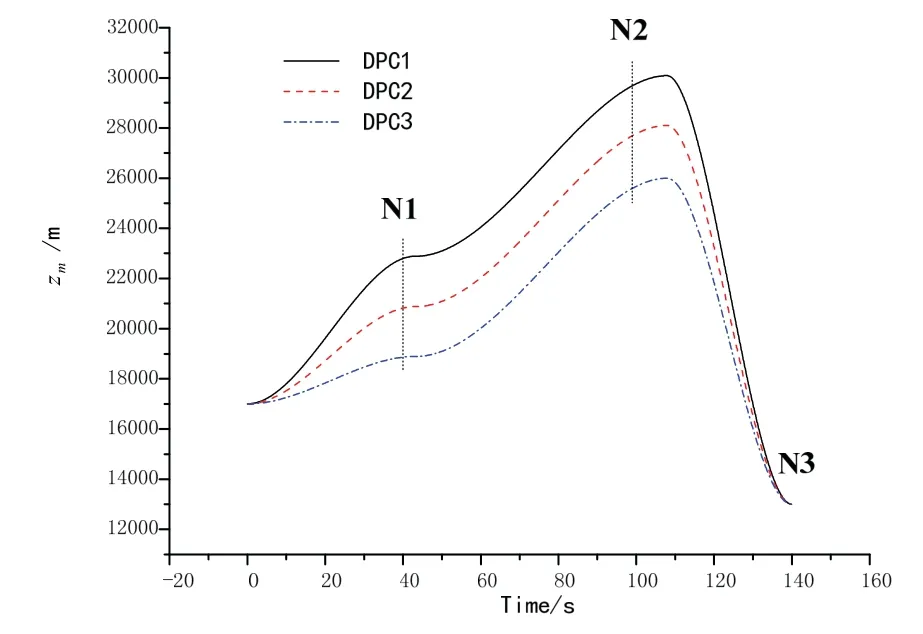
圖6 位移變化曲線(xiàn)Fig.6 Positionhistories
5 結(jié)論
本文對(duì)MPSP 制導(dǎo)方法進(jìn)行改進(jìn),考慮末端時(shí)刻時(shí)間偏差、控制量輸入約束和多個(gè)航路點(diǎn)約束,推導(dǎo)得到帶多個(gè)航路點(diǎn)約束的擴(kuò)展MPSP 制導(dǎo)方法,解決高超聲速飛行器臨近空間帶多個(gè)航路點(diǎn)處動(dòng)壓約束和末端輸出量約束條件下的機(jī)動(dòng)突防制導(dǎo)問(wèn)題。本文提出的基于最低動(dòng)壓約束大空域機(jī)動(dòng)突防策略主要優(yōu)點(diǎn)有:滿(mǎn)足氣動(dòng)操縱所需的最低動(dòng)壓約束條件;推進(jìn)系統(tǒng)在近似恒定的動(dòng)壓條件下工作性能更加穩(wěn)定;可通過(guò)調(diào)節(jié)臨近空間航路點(diǎn)處動(dòng)壓實(shí)現(xiàn)高超聲速飛行器臨近空間自主機(jī)動(dòng)突防。如何結(jié)合戰(zhàn)場(chǎng)突防博弈態(tài)勢(shì)動(dòng)態(tài)規(guī)劃航路點(diǎn)處動(dòng)壓的大小,從而進(jìn)一步提高高超聲速飛行器的自主突防能力是論文下一步研究方向。