基于多源數(shù)據(jù)融合的采煤機截割載荷預(yù)測方法
2021-05-27 01:03:02孫業(yè)新陳洪月
中國機械工程 2021年10期
于 寧 孫業(yè)新 陳洪月
遼寧工程技術(shù)大學(xué)機械工程學(xué)院,阜新,123000
0 引言
采煤機是煤礦開采最重要的設(shè)備。由于采煤工作面不均勻圍巖、堅硬夾矸等因素的影響,采煤機滾筒在截割過程中易受到強烈的沖擊,導(dǎo)致截割滾筒的截齒異常磨損或搖臂內(nèi)的齒輪斷齒失效等[1-2],因此,研究采煤機的滾筒載荷識別與預(yù)測方法對采煤機工作狀態(tài)監(jiān)測與預(yù)警具有重要意義。
截割載荷預(yù)測在煤礦裝備智能化領(lǐng)域一直是研究熱點與難題。郝志勇等[3]通過實驗采集銷軸和壓力環(huán)的三向應(yīng)變,采用小波分解降噪并進行載荷譜分形關(guān)聯(lián)維數(shù)計算,研究了滾筒截割載荷分布規(guī)律;李曉豁等[4]基于MATLAB/GUI研發(fā)了滾筒截割載荷模擬系統(tǒng),依據(jù)滾筒參數(shù)和煤巖信息預(yù)測截割載荷,解決了截割載荷計算困難問題;劉春生等[5]提出了一種改進分數(shù)階Tikhonov正則化載荷識別算法,對截割載荷有較好的識別效果。目前,有不少學(xué)者應(yīng)用神經(jīng)網(wǎng)絡(luò)識別與預(yù)測截割載荷。張強等[6]提出一種基于模糊神經(jīng)網(wǎng)絡(luò)的多傳感器信息融合的煤巖識別方法,依據(jù)實驗提取截割過程中的振動、電流等信號特征,預(yù)測了滾筒的截割軌跡。劉春生等[7]建立了基于熵權(quán)的正則化神經(jīng)網(wǎng)絡(luò)載荷譜預(yù)測模型,提出了依據(jù)有限楔入角的載荷譜的預(yù)測方法,實現(xiàn)不同楔入角的截割載荷預(yù)測。蔣干[8]采用IFOA-RBF神經(jīng)網(wǎng)絡(luò)實現(xiàn)了單一傳感信號下的煤巖截割狀態(tài)識別,經(jīng)過D-S證據(jù)理論融合,最終得到了煤巖截割載荷識別結(jié)果。毛君等[9]將深度信念網(wǎng)絡(luò)(deep belief network,DBN)應(yīng)用于滾筒載荷預(yù)測,經(jīng)過實驗測試得到了良好的載荷預(yù)測效果,結(jié)果表明DBN預(yù)測模型特征提取能力強,且優(yōu)于BP神經(jīng)網(wǎng)絡(luò)(BPNN)。
綜上所述,在數(shù)據(jù)量龐大且復(fù)雜的條件下,DBN可以實現(xiàn)特征自主學(xué)習(xí),在預(yù)測精度上優(yōu)于傳統(tǒng)的神經(jīng)網(wǎng)絡(luò),而應(yīng)用DBN的載荷預(yù)測研究較少。在上述學(xué)者對截割載荷的研究基礎(chǔ)上,本文提出了一種改進的DBN載荷預(yù)測模型,在DBN的基礎(chǔ)上,結(jié)合貝葉斯正則化(BR)方法和粒子群優(yōu)化(PSO)算法,建立了基于BR-PSO-DBN的滾筒載荷預(yù)測模型。
1 DBN的改進
1.1 DBN
DBN由多層無監(jiān)督受限玻爾茲曼機(restricted Boltzmann machine,RBM)和一層有監(jiān)督的反向傳播網(wǎng)絡(luò)堆疊而成[10]。DBN包含兩個學(xué)習(xí)過程:前向無監(jiān)督堆疊和后向有監(jiān)督微調(diào)。前向無監(jiān)督堆疊過程為:將第一個RBM的輸出作為第二個RBM的輸入,依此類推,采用貪婪學(xué)習(xí)算法進行預(yù)訓(xùn)練,實現(xiàn)從前到后的無監(jiān)督學(xué)習(xí),初步確定網(wǎng)絡(luò)權(quán)重。后向有監(jiān)督微調(diào)過程為:從DBN網(wǎng)絡(luò)最后一層開始精調(diào)網(wǎng)絡(luò)各層的參數(shù),根據(jù)標(biāo)簽數(shù)據(jù)進行訓(xùn)練,采用BP算法微調(diào)初始網(wǎng)絡(luò)權(quán)重,得到最優(yōu)的網(wǎng)絡(luò)參數(shù)。
1.2 引入BR法
多傳感器采集條件下,數(shù)據(jù)量增大,特征維度增加,RBM堆疊得到的DBN非常復(fù)雜,建立的模型容易發(fā)生過擬合現(xiàn)象。為避免過擬合問題,增強網(wǎng)絡(luò)的泛化能力,本文引入BR法優(yōu)化每層RBM的訓(xùn)練函數(shù),限制網(wǎng)絡(luò)規(guī)模的同時減小訓(xùn)練誤差。
根據(jù)BR法[11],將RBM中的性能函數(shù)優(yōu)化為
Fw=αP+βEw
(1)
(2)
P0=P(v,h)∝exp(-E(v,h))=
exp(hTWv+bTv+aTh)
(3)
式中,F(xiàn)w為優(yōu)化的訓(xùn)練函數(shù);Ew為復(fù)雜度懲罰項;P0為初始的訓(xùn)練函數(shù);α、β為超參數(shù);h、v分別表示隱含層和可視層;m、n分別為可視單元與隱藏單元數(shù)量;P為聯(lián)合概率分布;E(v,h)為該組態(tài)下的能量函數(shù);W為顯層與隱層各單元之間的連接權(quán)值,W=[wij];a、b分別為顯層與隱層各單元的偏置值。
如果α遠大于β,則減小訓(xùn)練誤差,如果α遠小于β,則減小網(wǎng)絡(luò)規(guī)模。
確定網(wǎng)絡(luò)結(jié)構(gòu)后,確定訓(xùn)練函數(shù)超參數(shù)α、β的取值。依據(jù)HINTON等[12]給出的正則化法超參數(shù)取值的經(jīng)驗(α∈[0.5,1],β∈[0,0.5]),本文通過實驗隨機多次在取值范圍內(nèi)給α、β賦值,最后取網(wǎng)絡(luò)識別效果最佳的賦值。引入BR法優(yōu)化各層RBM,確定最優(yōu)的網(wǎng)絡(luò)模型規(guī)模以及超參數(shù)α、β,提高網(wǎng)絡(luò)對樣本數(shù)據(jù)的適應(yīng)能力。
1.3 引入PSO算法
為使網(wǎng)絡(luò)獲得最優(yōu)的網(wǎng)絡(luò)權(quán)重,引入PSO算法對傳統(tǒng)的BP算法加以改進,強化網(wǎng)絡(luò)精調(diào)的能力。PSO算法通過隨機粒子種群迭代進行尋優(yōu),每次迭代通過跟蹤個體最優(yōu)解和全局最優(yōu)解來更新粒子的運行速度和位置。首先初始化粒子群參數(shù),種群F={F1,F2,…,Fn},設(shè)第i個粒子在t次迭代的位置為Fi,t=(fi1,t,fi2,t,…,fiD,t)T,速度Vi,t=(vi1,t,vi2,t,…,viD,t)T,個體的最優(yōu)位置pi,t=(pi1,t,pi2,t,…,piD,t)T,全局的最優(yōu)位置pg,t=(pg1,t,pg2,t,…,pgD,t)T,則第i粒子在t+1次迭代時有:
vid,t+1=vid,t+c1r1(pid,t-xid,t)+c2r2(pgd,t-xid,t)
(4)
式中,d=1,2,…,D;i=1,2,…,n;r1、r2為樣本空間(0,1)內(nèi)的隨機數(shù);c1、c2為加速因子。
PSO算法中如果個體最優(yōu)解多于全局最優(yōu)解,則會陷入局部最優(yōu)解,所以筆者引入慣性權(quán)重來平衡算法的尋優(yōu)能力:
w=wmax-(wmax-wmin)t/tmax
(5)
(6)
式中,w為第t次迭代的權(quán)重;C1、C2為第t次迭代的加速因子;wmax、wmin分別為最大和最小的慣性權(quán)重;tmax為最大迭代次數(shù);Cmax、Cmin分別為最大和最小的加速因子。
式(5)能夠增強算法局部尋優(yōu)能力,式(6)能夠增強粒子個體的搜索能力和對全局的感知能力。改進PSO算法的步驟如圖1所示。
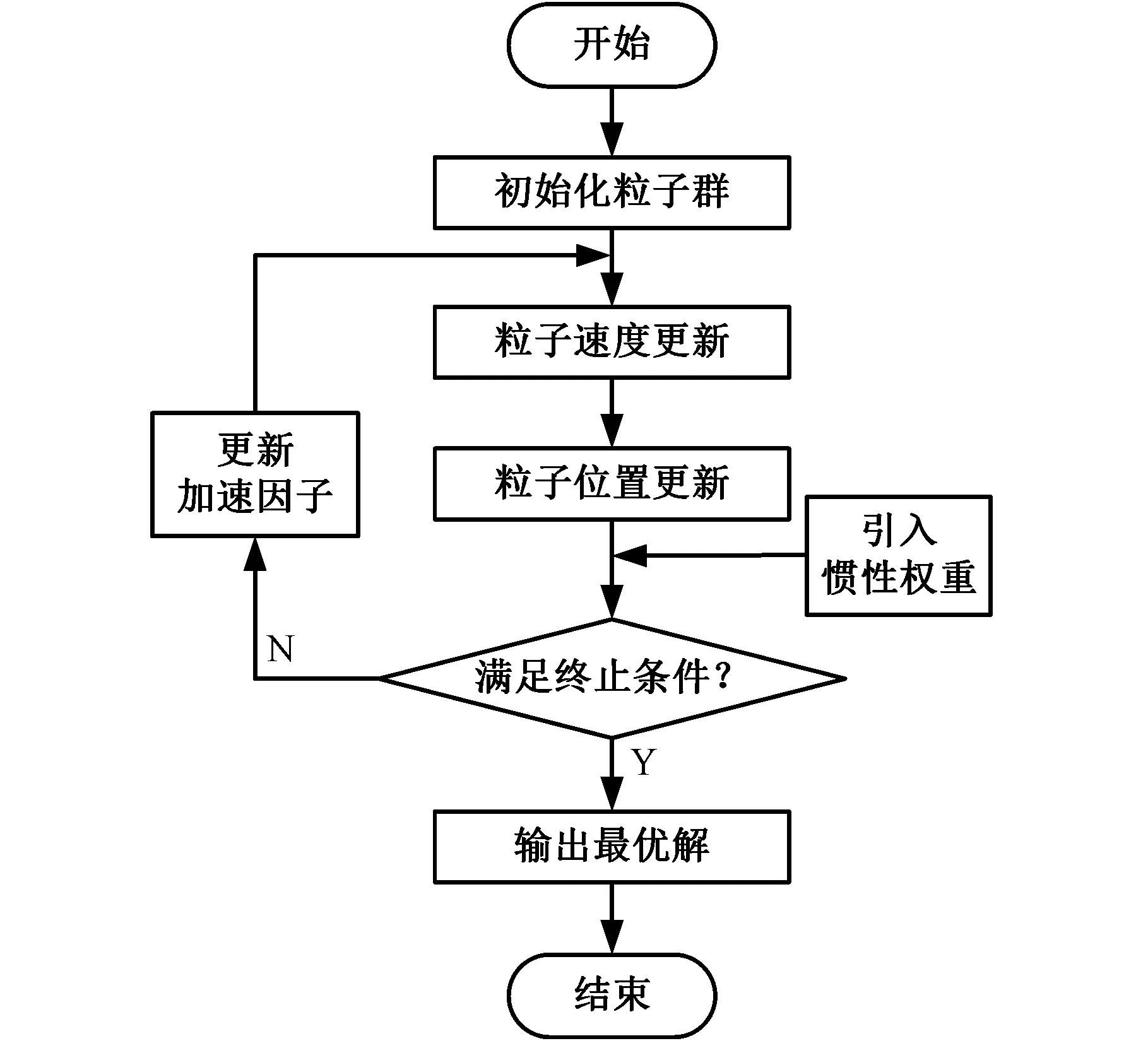
圖1 改進粒子群算法步驟Fig.1 Steps of improved particle swarm algorithm
1.4 改進決策域更新系數(shù)
PSO算法是群智能算法之一,而收斂停滯一直是群智能算法的難題,因為算法有限的搜索能力,使種群可能收斂到一個停滯解[13]。為克服此問題,本文通過改進決策域更新系數(shù)來增大種群個體的決策域半徑。
引入指數(shù)分布系數(shù)對決策域更新系數(shù)β0進行改進:
β′=β0Ri
(7)
式中,Ri為指數(shù)分布系數(shù)。
與原更新系數(shù)相比,指數(shù)分布系數(shù)擴大了算法的搜索范圍,加快了起始計算速度,增強了局部尋優(yōu)能力。
對引入指數(shù)分布系數(shù)的決策域更新系數(shù)做線性處理,以保證改進后的算法在后期的搜索精度:
β′(t)=β′min+(β′max-β′min)t/tmax
(8)
種群迭代至后期時,算法的調(diào)整步長減小,以實現(xiàn)最優(yōu)解的搜索精度。
綜合考慮算法的收斂速度和尋優(yōu)精度,采用遞減移動步長S,使算法整個過程始終保持較高的搜索強度,遞減的公式為
S=S0δtεδ∈(0,1)
(9)
式中,S0為初始步長;δ為遞減系數(shù);ε為待優(yōu)化問題的問題域。
改進后的動態(tài)決策域半徑更新公式為
(10)
式中,rs為螢火蟲感知域;rdi為螢火蟲i的動態(tài)決策域;ni為鄰域的閾值;Ni(t)為螢火蟲i在第t次的鄰居集合。
位置更新公式為
(11)
2 建立BR-PSO-DBN預(yù)測模型
本文以某型采煤機左截割部為實驗對象,滾筒截割三向載荷和滾筒扭矩為預(yù)測目標(biāo),輸入?yún)?shù)選取惰輪軸、連接架銷軸載荷和搖臂殼體應(yīng)變量,采煤機截割部結(jié)構(gòu)見圖2。
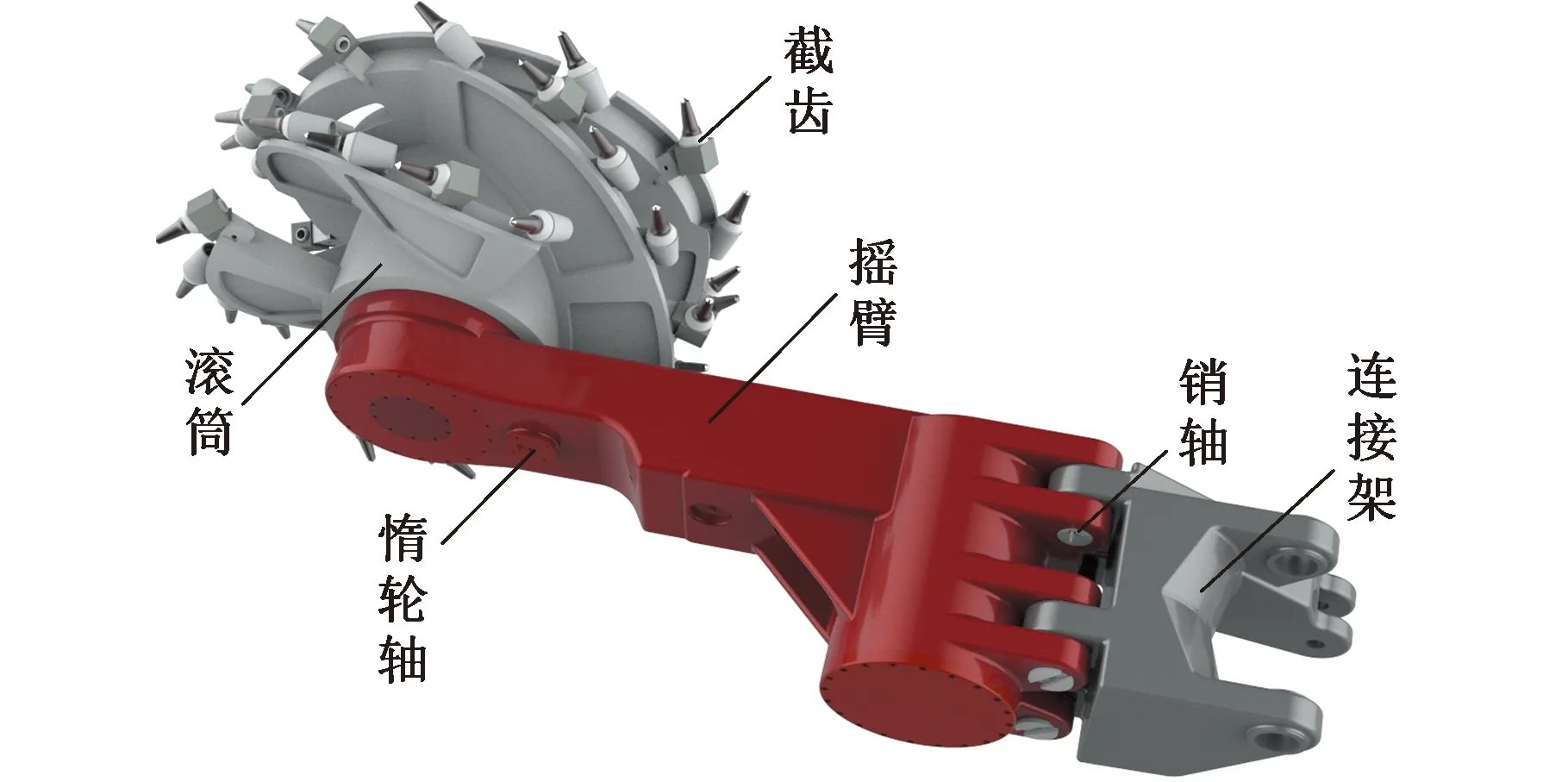
圖2 采煤機截割部結(jié)構(gòu)圖Fig.2 Structure diagram of cutting part of coalmining machine
(1)惰輪軸載荷。惰輪軸距離滾筒側(cè)最近,載荷傳遞損耗小,以惰輪軸載荷為特征參數(shù),能夠提高截割載荷預(yù)測精度。實驗中采用與惰輪軸外形相似且具有同等力學(xué)特性的傳感器[14],實時監(jiān)測截割過程中惰輪軸的Y向和Z向受力情況。
(2)連接架銷軸載荷。連接架銷軸連接搖臂與連接架,滾筒截割載荷通過搖臂作用在連接架銷軸,因此連接架銷軸載荷可以作為預(yù)測截割載荷的特征參數(shù)。4個連接銷軸Y向和Z向受力狀況由具有相同強度的銷軸傳感器測得[15]。
(3)搖臂殼體應(yīng)變。搖臂作為截割部的重要組成部分,支撐整個滾筒,承受較大的滾筒截割載荷,所以在搖臂殼體兩側(cè)進行應(yīng)力應(yīng)變測量。利用模態(tài)分析方法[16]研究搖臂變形規(guī)律,在搖臂采空面過渡位置和惰輪軸周圍的受力較大區(qū)域內(nèi)布置12個應(yīng)變傳感器,并在應(yīng)變傳感器正上方安裝金屬防護板,以適應(yīng)截割煤巖時的復(fù)雜工況。傳感器布置如圖3所示,其中3、5、8號傳感器測量Z向應(yīng)變,余下傳感器測量Y向應(yīng)變。

圖3 搖臂殼體應(yīng)變值采集示意圖Fig.3 Schematic illustration of the collection of strainvalues of the rocker shell
將截割部滾筒所受三向截割載荷和扭矩作為輸出參數(shù),實測數(shù)據(jù)通過截齒傳感器采集[17]。
綜上所述,采煤機滾筒載荷預(yù)測模型的輸入層包括22個神經(jīng)元,輸出層包括4個神經(jīng)元。構(gòu)建的BR-PSO-DBN模型如圖4所示,其中,C表示隱含層, W表示對應(yīng)計算過程。
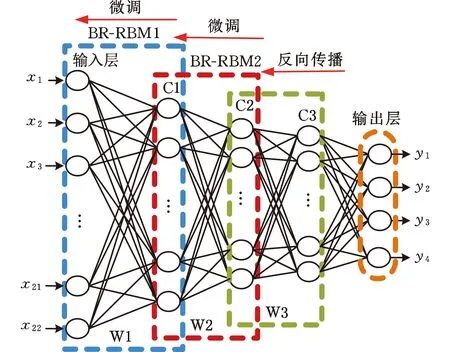
圖4 BR-PSO-DBN預(yù)測模型Fig.4 BR-PSO-DBN forecasting model
BR-PSO-DBN預(yù)測模型包含2個BR-RBM隱含層,各隱含層內(nèi)神經(jīng)元個數(shù)由BR法優(yōu)化確定;預(yù)測模型采用BP-PSO算法進行微調(diào)。
3 訓(xùn)練BR-PSO-DBN預(yù)測模型
在截割載荷預(yù)測之前,對BR-PSO-DBN預(yù)測模型進行訓(xùn)練。
(1)數(shù)據(jù)處理。從實驗數(shù)據(jù)中提取輸入樣本并構(gòu)建樣本空間,劃分訓(xùn)練樣本和測試樣本。樣本空間根據(jù)3種不同工況分為3個部分,分別在各區(qū)域內(nèi)中截取10 000個樣本數(shù)據(jù)。歸一化處理樣本數(shù)據(jù),加快程序的運行,公式為
x*=(x-xmin)/(xmax-xmin)
(12)
式中,xmin為樣本數(shù)據(jù)最小值;xmax為樣本數(shù)據(jù)最大值。
(2)數(shù)據(jù)融合。輸入層xi通過2層RBM和1層反饋層進行數(shù)據(jù)融合,RBM作為一種生成式隨機神經(jīng)網(wǎng)絡(luò),其聯(lián)合狀態(tài)的能量函數(shù)為
(13)
式中,I、J分別為顯性神經(jīng)元和隱性神經(jīng)元的個數(shù)。
RBM中隱層C1或C2中的神經(jīng)元hj被激活的概率為
(14)
判斷神經(jīng)元hj是否被激活的公式為
(15)
式中,u服從0~1均勻分布,即u~U(0,1)。
RBM為雙向連接,則重構(gòu)時隱層神經(jīng)元激活顯層神經(jīng)元的概率為
(16)
對反饋層采用BP算法,輸出神經(jīng)元表達式為
(17)
其權(quán)重表達式為
wji(t+1)=wji(t)+ηδpjopj
(18)
式中,η為微調(diào)學(xué)習(xí)速率;δpj為網(wǎng)絡(luò)預(yù)測誤差;opj為神經(jīng)元的輸出信號。
(3)無監(jiān)督學(xué)習(xí)。通過貝葉斯法優(yōu)化每層RBM的規(guī)模,固定隱元個數(shù),確定超參數(shù)α、β和初始權(quán)值。預(yù)訓(xùn)練階段學(xué)習(xí)速率采用常用值0.1,每個RBM迭代200次。
(4)有監(jiān)督學(xué)習(xí)。輸入標(biāo)簽數(shù)據(jù)通過PSO算法優(yōu)化的BP神經(jīng)網(wǎng)絡(luò)微調(diào),確定最優(yōu)權(quán)值,微調(diào)學(xué)習(xí)速率η同樣設(shè)置為0.1,最后保存訓(xùn)練好的網(wǎng)絡(luò)模型參數(shù)。具體流程見圖5。
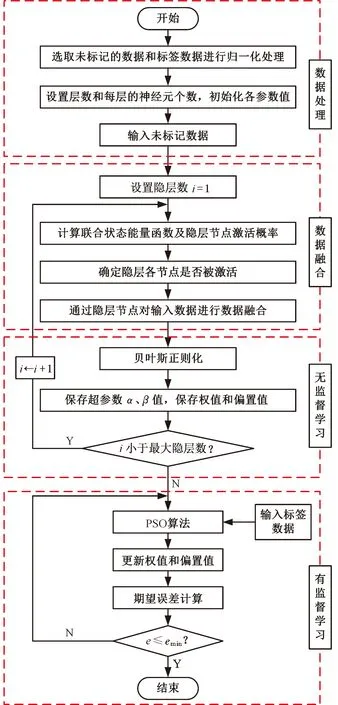
圖5 BR-PSO-DBN具體流程圖Fig.5 BR-PSO-DBN specific flow chart
4 截割載荷測試實驗
實驗數(shù)據(jù)來源于中煤張家口煤礦機械裝備實驗室,模擬井下實際工況進行采煤機截割載荷實驗測試,實驗系統(tǒng)的組成如圖6所示。
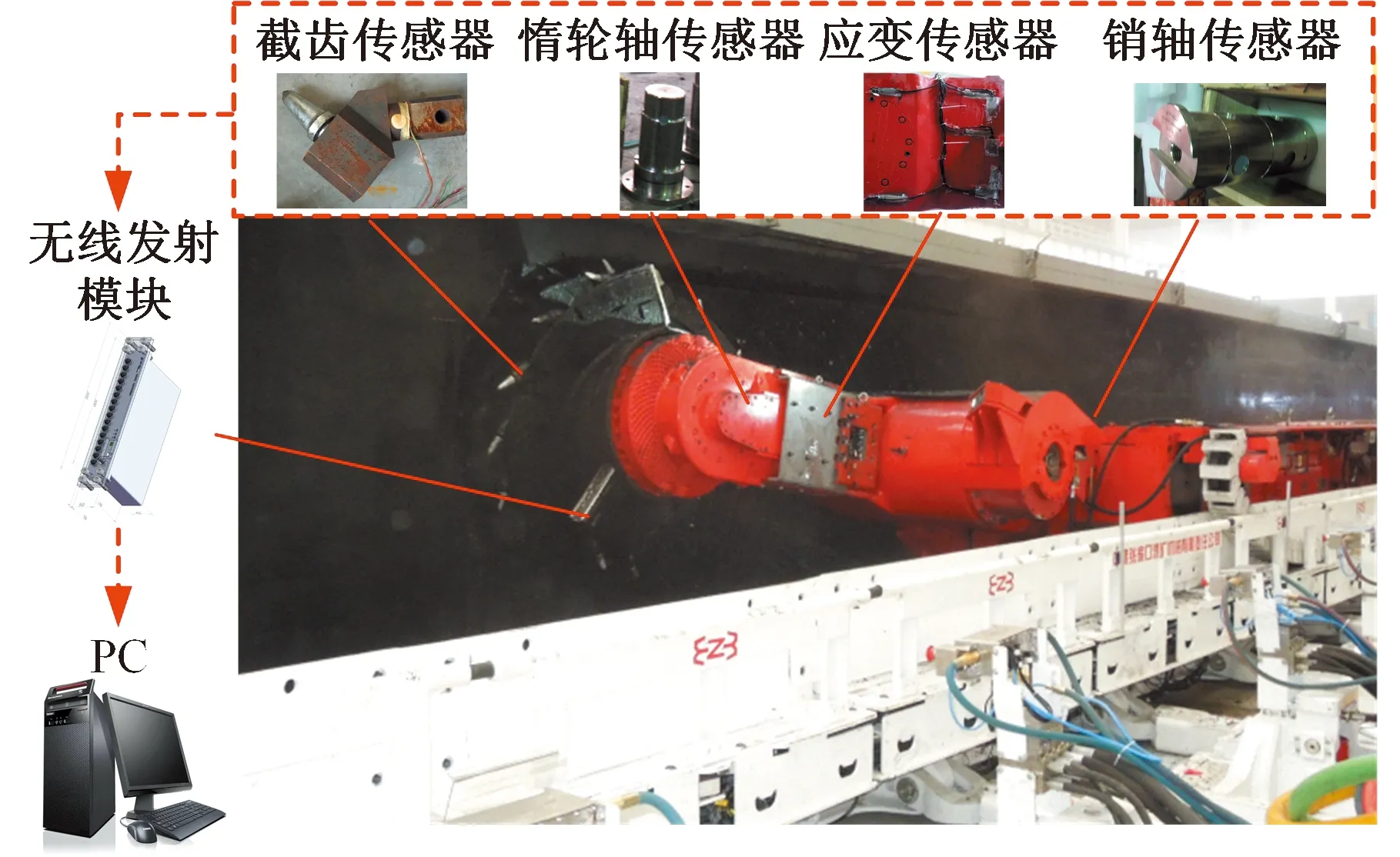
圖6 實驗系統(tǒng)Fig.6 Experimental system
實驗系統(tǒng)通過在螺旋滾筒下方安裝無線發(fā)射模塊采集截齒傳感器數(shù)據(jù),在搖臂采空側(cè)安裝無線發(fā)射模塊對惰輪軸傳感器、搖臂應(yīng)變等數(shù)據(jù)進行采集和無線傳輸,最后匯總顯示到PC端。
根據(jù)截煤經(jīng)驗,采煤機搖臂割頂煤時比采煤機搖臂割底煤時更易發(fā)生應(yīng)變集中而造成搖臂損傷,并且隨搖臂擺角增大而顯著,因此實驗中,左截割部在搖臂最大擺角35°條件下,分別測試采煤機空載、斜切進刀和正常截割三種工況下不同速度時的受力。在采煤機空載階段牽引速度設(shè)為2 m/min,檢查采煤機行走過程中各傳感數(shù)據(jù)傳輸情況;當(dāng)采煤機行至26號架后以3 m/min行駛,進入斜切進刀截割過程;當(dāng)采煤機行至16號架時,進入到正常截割階段,采煤機以3 m/min繼續(xù)截割至煤壁最左側(cè)停止,實驗經(jīng)28 min結(jié)束,樣本數(shù)據(jù)采集完畢。測試時三機狀態(tài)如圖7所示,測試過程嚴格按照采煤機在煤礦井下的截割工藝運作。

圖7 實驗測試三機狀態(tài)Fig.7 Status of 3 experimental machines
數(shù)據(jù)處理后,由樣本數(shù)據(jù)中提取的100個測試實驗數(shù)據(jù)點所構(gòu)成的連接架銷軸輸入樣本曲線(8組)、惰輪軸輸入樣本曲線(2組)、搖臂應(yīng)變輸入樣本曲線(12組)分別如圖8~圖10所示。
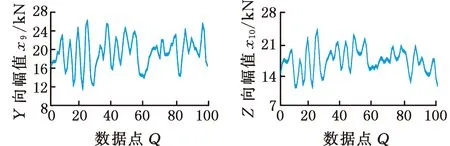
圖9 惰輪軸Y向和Z向輸入樣本Fig.9 Y and Z input samples of idler wheels

圖10 搖臂應(yīng)變輸入樣本Fig.10 Rocker strain input sample
5 數(shù)據(jù)對比分析
首先將測試樣本輸入到BR-PSO-DBN預(yù)測模型中,然后經(jīng)過數(shù)據(jù)融合處理,最后輸出對應(yīng)數(shù)據(jù)點的滾筒三向載荷和滾筒扭矩特征數(shù)據(jù)。將截齒傳感器實際測得的截割載荷數(shù)據(jù)與采煤機滾筒截割載荷預(yù)測模型得到的預(yù)測載荷數(shù)據(jù)進行對比分析,通過載荷預(yù)測的精度來驗證BR-PSO-DBN模型的準(zhǔn)確性。觀察圖11中滾筒載荷預(yù)測值與實測值曲線可知:預(yù)測曲線與實測曲線的變化規(guī)律較為相似,曲線中峰值點的位置是一一對應(yīng)的,說明預(yù)測結(jié)果能夠準(zhǔn)確地反映滾筒實際載荷變化特征。

圖11 實測曲線與預(yù)測曲線對比 Fig.11 Comparison of measured and predicted curves
對實驗數(shù)據(jù)與預(yù)測數(shù)據(jù)作進一步處理,得到預(yù)測與實測數(shù)據(jù)如表1所示,將截割載荷的BR-PSO-DBN預(yù)測值和實驗值從平均值、最大值、最小值和標(biāo)準(zhǔn)偏差4個方面進行比較:在X向和Y向上的滾筒截割載荷以及滾筒扭矩的預(yù)測值略小于實際測試值,在Z向的截割載荷預(yù)測值略大于實際測量值。4個載荷測試結(jié)果的相關(guān)系數(shù)分別為0.8370、0.8926、0.8765和0.9455,均在0.83以上,其中滾筒扭矩預(yù)測值與實際測試值的近似程度最高,達到了95%,說明BR-PSO-DBN預(yù)測模型可以準(zhǔn)確地預(yù)測滾筒的截割扭矩,在X、Y和Z向上的截割載荷誤差相對較大,但預(yù)測值與實驗值之間的相似度超過83%,證實了該預(yù)測值具有較高精度,BR-PSO-DBN模型預(yù)測截割載荷的方法具有可行性。
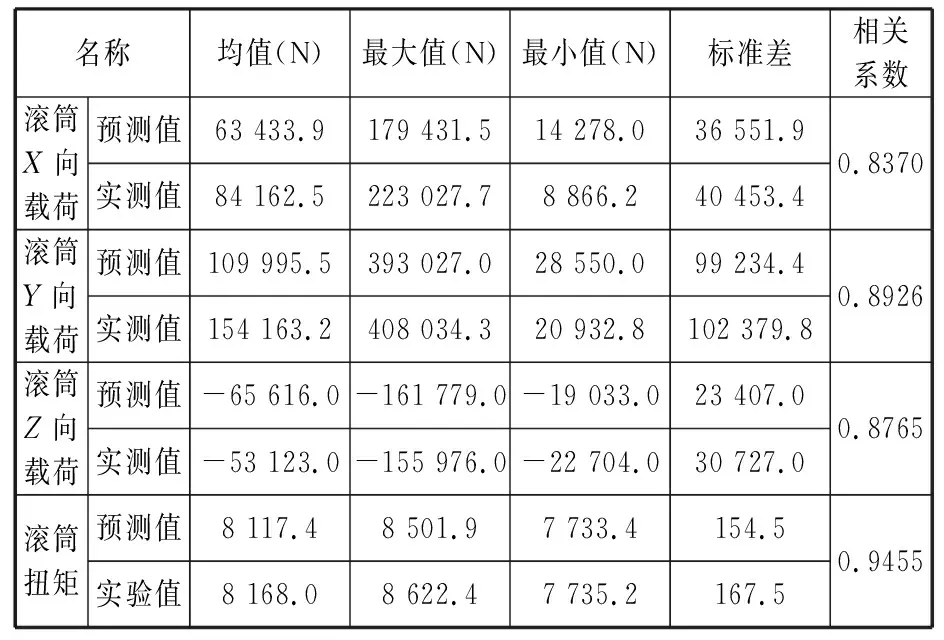
表1 預(yù)測與實測數(shù)據(jù)誤差對比分析
6 結(jié)論
(1)本文采用BR-PSO-DBN模型從多傳感器數(shù)據(jù)中抽取狀態(tài)特征信息融合,實現(xiàn)截割載荷的預(yù)測與辨識,解決了單一傳感器監(jiān)測效能低和截割載荷預(yù)測精度低的問題。
(2)以深度信念網(wǎng)絡(luò)為框架,在無監(jiān)督學(xué)習(xí)和有監(jiān)督學(xué)習(xí)階段分別引入貝葉斯正則化和改進的粒子群算法對傳統(tǒng)深度信念網(wǎng)絡(luò)結(jié)構(gòu)進行優(yōu)化,建立了BR-PSO-DBN截割載荷預(yù)測模型。
(3)通過實驗系統(tǒng)測試得到惰輪軸載荷數(shù)據(jù)、連接架銷軸載荷數(shù)據(jù)、搖臂應(yīng)變數(shù)據(jù),歸一化處理后創(chuàng)建訓(xùn)練樣本和測試樣本,并導(dǎo)入訓(xùn)練樣本,獲得最優(yōu)的網(wǎng)絡(luò)參數(shù),完成了BR-PSO-DBN模型的訓(xùn)練。
(4)輸入以22個變量的100組數(shù)據(jù)組成的測試樣本,輸出滾筒截割載荷和扭矩的預(yù)測數(shù)據(jù),將預(yù)測曲線與現(xiàn)場實驗系統(tǒng)實測曲線進行比對,兩組曲線變化趨勢基本相同,對應(yīng)峰值基本一致。
(5)數(shù)據(jù)處理后,將兩種結(jié)果的相關(guān)系數(shù)進行對比。BR-PSO-DBN預(yù)測模型對截割載荷預(yù)測精度達到了83%以上,其中滾筒扭矩預(yù)測精度最高,達到了95%,進一步驗證了截割載荷預(yù)測具有很高精度,預(yù)測方法能夠應(yīng)用到實際生產(chǎn)中對采煤機滾筒載荷進行識別,提高采煤機截割煤巖安全狀態(tài)感知力。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
防爆電機(2022年1期)2022-02-16 01:14:06
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
小哥白尼(趣味科學(xué))(2019年6期)2019-10-10 01:01:50
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
發(fā)明與創(chuàng)新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
河南科技(2014年18期)2014-02-27 14:14:58