基于智能預測算法的自動化采煤技術應用
2021-06-03 05:36:08王立強
陜西煤炭 2021年3期
王 飛,王 軍,王立強
(國能神東煤炭集團有限責任公司大柳塔煤礦,陜西 神木 719315)
0 引言
隨著科學技術的不斷發展,機械電氣自動化在工業中的持續深入應用,人們認識到自動化技術對規避機電設備的安全風險,提高運行設備的穩定可靠程度,減少操作人員數量,提高生產效率,提升作用環境的整體安全生產能力有著重要作用。自動化采煤技術著力于將多種學科技術(工業控制、以太網、無線通訊、視頻、音頻、液壓技術等)應用于綜采工作面,通過在工作面集中監控中心對綜采設備進行遠程集中控制,使各臺設備可以協調、高效、連續、穩定、安全運行,并將人員從設備的繁雜操作工作中解放出來,實現綜采工作面的少人化[1]。
國內外的煤礦行業都在提升礦井的自動化生產能力方面不斷加大成本投入,以期實現礦井生產的少人化,乃至無人化。智能礦山的提出更是將煤礦的自動化建設推升到一個新的高度,根據當前的科學技術水平以及礦井建設的發展階段,智能煤礦的建設大致形成一個生產工藝自動化、物流管理智能化、固定設施無人化、生產管理全面信息化的建設目標,最終實現礦山的安全、綠色、高效開采。智能礦山建設首先是基礎設備的自動化建設,即煤礦井下的設備具備完全的自動化生產能力;其次是實現生產管理的網絡化、遠程化、遙控化乃至無人化;最后才能確保煤礦企業從采礦作業環節、篩選加工環節、運輸環節直至銷售環節實現完全無縫智能化。
1 自動化割煤原理
自動化割煤通過示范刀學習記錄工作面的輪廓,并可以自動重復學習割煤過程中的滾筒軌跡。適用于煤層穩定,頂底板比較平整穩定,周期來壓穩定的工作面。自動化割煤使用2個傾角傳感器跟蹤2個搖臂的高度,每個搖臂使用一個傾角傳感器,通常在電控箱內部也安裝有傾角傳感器,用來跟蹤煤機的俯仰和搖擺角度,結合軟件處理可以不受坡度和搖擺角度影響。自動化割煤使用傳感器來采集煤機信息,在顯示計算機屏幕顯示。顯示計算機是控制系統的信息顯示界面,2個搖臂傾角傳感器安裝在搖臂側面,俯仰和搖擺的傾角傳感器安裝在電控箱內[2]。
記憶割煤首先要設置相關參數,先進行一個完整循環的示范刀學習,然后進行記憶割煤,最后從工作面的一個端頭開始,按照實際采煤工藝完成整個工作面割煤的一個循環,在同一端頭結束[3]。在示范刀割煤時,操作人員需要根據工作面煤層變化情況人為調整滾筒位置,控制器通過監測搖臂傳感器的角度變化來確定滾筒位置,并根據左右牽引部旋轉編碼器來自動計算采煤機的位置,同時控制器會記錄采煤機在工作面內的任一位置對應的滾筒高度參數。示范刀學習完畢后進入記憶割煤模式,采煤機會根據控制器已經設置好的參數和記錄的滾筒軌跡自動調整滾筒高度實現自動割煤,如果煤層條件發生較大變化,則由采煤機司機手動操作進行人工干預,煤機司機通過遙控器可實現記憶割煤暫停、繼續、開始、退出,示范刀學習開始、學習結束,工步跳越等操作,在記憶割煤過程中,手動操作具有優先權,可隨時停止采煤機。
2 智能預測算法解析
2.1 傳感器布置
自動化采煤機使用2個傾角傳感器跟蹤2個搖臂的高度,左右搖臂各使用一個傾角傳感器,在采煤機電控箱內部安裝有機身姿態傳感器,用來跟蹤采煤機的俯仰和搖擺角度,結合軟件處理可以不受坡度和搖擺角度影響[4]。自動化采煤機使用傳感器來采集煤機狀態信息,在采煤機顯示計算機屏幕顯示。顯示計算機是控制系統的信息顯示界面。如圖1所示。
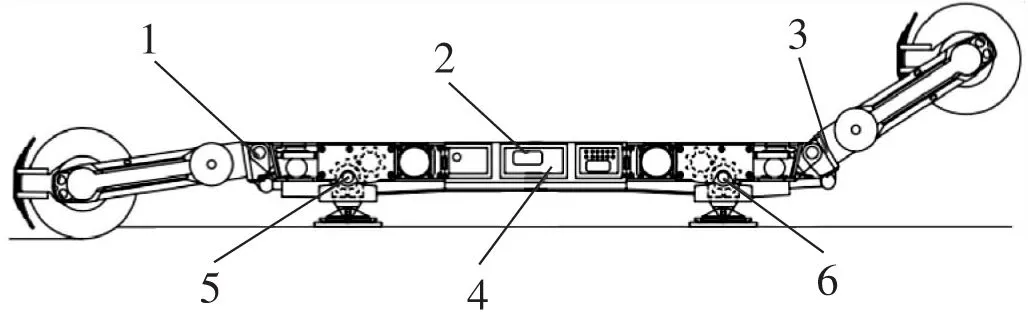
1-左搖臂傾角傳感器;2-顯示計算機;3-右搖臂傾角傳感器;4-俯仰及搖擺傳感器;5-左復位傳感器;6-右復位傳感器圖1 采煤機傳感器安裝位置Fig.1 Installation position of shearer sensor
2.2 智能預測算法
首先將煤層離散化,分成多段矩形小區間,矩形寬度為截割頭的推進深度,在每一個區間假定煤層不變化。然后如圖2采煤機坐標系所示,通過當前采煤機割煤過程中的運行數據計算出下一循環的運行軌跡,使采煤機在下一循環依據計算軌跡運行。最后割煤過程中遇到煤層變化情況時由采煤機司機人工干預操作,采煤機記錄人工干預后的運行數據,作為下一循環的計算參考值,以此類推,實現采煤機在人工干預下的自動化采煤工藝[6]。
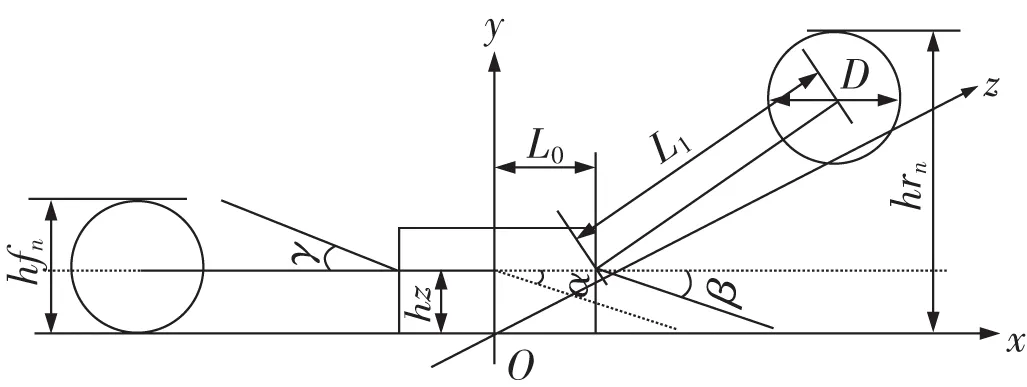
圖2 采煤機坐標系示意Fig.2 Schematic diagram of shearer coordinate system
圖2中,自動化控制系統根據采煤機坐標系采集當前運行數據,并根據當前運行數據計算采煤機下一循環經過當前位置時的運行軌跡,數據計算公式為
(1)
式中,D為截割頭直徑,cm;xn為水平移動量,cm;L1為搖臂長度,cm;αn為機身水平傾角,(°);βn為右搖臂仰角,(°);γ為左搖臂仰角,(°);hz為機身到溜槽地板高度,cm;hrn為右截割頭高度,cm;hfn為左截割頭高度,cm;n為循環次數。
3 自動化采煤技術工藝
3.1 自動割煤參數設定
煤機司機在自動參數配置界面可以輸入修改采煤機自動割煤狀態下的工作參數。
左、右端頭閉鎖支架:最左側支架號,自動向左側運行時越過此支架;最右側支架號,自動向右側運行時越過此支架。
當前支架:煤機當前所處支架號,用于手動修正煤機位置。
每個支架脈沖數:每個支架寬度距離對應多少個D齒輪傳感器脈沖數。
搖臂長度:銷軸到滾筒中心點之間的距離。
滾筒直徑:包含截齒的滾筒直徑。
煤機Y尺寸:此參數設定煤機的Y 尺寸,此尺寸為溜槽底板到搖臂鉸接銷軸中心間的距離。
左、右傾角傳感器修正值:左搖臂傾角傳感器零點修正量;右搖臂傾角傳感器零點修正量。
高度誤差閾值:此參數定義搖臂目標高度的死區范圍,搖臂高度進入此范圍內,控制系統認為此高度是合適的,控制系統將停止調節滾筒高度,搖臂電磁閥斷電。例如:高度閾值參數為0.035 m,當搖臂高度在目標高度的±35 mm的范圍之內時,控制系統將停止調節搖臂高度。
自動化割煤機頭、機尾支架:煤機在自動區間運行的機頭支架位置;煤機在自動區間運行的機尾支架位置。
機頭、機尾三角煤折返點:割三角煤是煤機進窩到達機頭折返點的支架號;割三角煤是煤機進窩到達機尾折返點的支架號。
當前工步:記憶割煤按照工步執行,不同工步執行不同的動作[7]。
3.2 工作模式
采煤機工作模式分為手動和記憶2種模式,手動模式下,司機手動控制每個搖臂的高度,自動模式下搖臂依據記憶采高和臥底調節高度。手動模式同時執行記憶功能,一刀割煤完成后將記憶當前采高和臥底,采用雙軌雙向記憶數據,隨著割煤進行記憶數據始終被刷新,保持最近兩刀的割煤數據。工作模式在采煤機電腦屏幕首頁顯示,開機默認為手動模式,用鼠標點擊可以切換工作模式,再次點擊又回到手動模式。在自動模式下,泵電機啟動后搖臂將按照記憶采高和臥底調節高度值,到高度值進入涉及誤差帶時停止調節[8]。
3.3 煤機定位與修正
煤機在工作面行走時根據監測旋轉編碼器來確認煤機位置,以支架編號來確認煤機位置。在左右牽引部上安裝有復位傳感器,在機頭、機尾支架上焊接有復位磁鐵,當煤機行走靠近磁鐵時能夠監測到復位信號,自動修正煤機位置[9]。如圖3所示。
煤機位置通過電腦屏幕首頁可直觀查看,如果位置和實際值存在偏差可在首頁用鼠標點擊煤機位置,在彈出的數字鍵盤窗口輸入正確的位置,在點擊確認后即可修正煤機位置。如果沒有修正偏差,在機頭和機尾感應到復位磁鐵信號時,煤機能自動修正位置。
3.4 采煤機工步
自動化割煤一個循環過程細分為12工步執行,通過設置自動化割煤區間和兩端三角煤折返點可以控制煤機在指定點執行規定動作[10],如圖4所示。

圖4 自動化割煤十二工步示意Fig.4 Twelve working steps of automatic coal cutting
第1步:機頭到機尾區間,根據記憶采高臥底調整搖臂高度。
第2步:機尾極限位置,停牽引,滾筒換向。
第3步:機尾極限位置到機尾三角煤折返點,進煤窩,根據設定采高調整前搖臂。
第4步:機尾三角煤折返點,停牽引,滾筒換向。
第5步:機尾三角煤折返點到機尾極限位置,根據記憶采高臥底調整搖臂高度。
第6步:機尾極限位置,停牽引,滾筒換向。
第7步:機尾到機頭區間,根據記憶采高臥底調整搖臂高度。
第8步:機頭極限位置,停牽引,滾筒換向。
第9步:機頭極限位置到機頭三角煤折返點,進煤窩,根據設定采高調整前搖臂。
第10步:機頭三角煤折返點,停牽引,滾筒換向。
第11步:機頭三角煤折返點到機頭極限位置,根據記憶采高臥底調整搖臂。
第12步:機頭極限位置,停牽引,滾筒換向。
4 結語
在智能預測基礎上實現的采煤機自動化采煤,適用于煤層穩定,頂底板比較平整,頂板穩定,周期來壓穩定的工作面,克服了當前煤巖識別傳感器技術不能滿足生產的弱點,有效規避了井下煤層賦存條件復雜的實際困難[11]。將綜采工作面煤層微分化,采煤機記憶人工手動割煤過程中的傳感器數據,通過計算機智能計算,預測出采煤機自動采煤模式下割煤軌跡,使采煤機在預測軌跡上運行,以此實現自動化采煤的目的,一次學習后可以無限次循環割煤,無需煤巖識別、激光雷達等外部設備和傳感器,也不需要精確的煤層地質數據,成本低可靠性高,工程質量優于人工割煤,為煤礦綜采工作面的少人化生產提供了技術支持,為智能礦山模式下的無人化生產奠定了基礎[12]。
猜你喜歡
保健醫苑(2022年5期)2022-06-10 07:46:12
防爆電機(2022年1期)2022-02-16 01:14:06
小哥白尼(趣味科學)(2021年8期)2021-11-20 06:08:04
河北畫報(2021年2期)2021-05-25 02:07:50
中國生物醫學工程學報(2019年4期)2019-07-16 08:04:16
模具制造(2019年3期)2019-06-06 02:10:54
山西大同大學學報(自然科學版)(2016年2期)2016-12-12 03:19:28
沈陽醫學院學報(2014年4期)2014-12-27 13:44:20
航天器工程(2014年5期)2014-03-11 16:35:55
河南科技(2014年18期)2014-02-27 14:14:58
