
AI賦能時代食品配料機器人工作空間分析與仿真
2021-06-10 06:50:14崔岳賈惠彬張華龍
食品工業(yè) 2021年5期
崔岳,賈惠彬,張華龍
1. 廊坊職業(yè)技術(shù)學院(廊坊 065000);2. 華北電力大學(保定 071000)
食品生產(chǎn)過程中的配料、物料傳遞和食品包裝過程是人工智能賦能時代食品工業(yè)系統(tǒng)中非常重要的環(huán)節(jié)[1]。隨著食品安全對智能化、自動化生產(chǎn)的需求,勞動力成本的上升和食品工業(yè)的大規(guī)模發(fā)展,工業(yè)機器人作為食品配料過程中的自動化設(shè)備發(fā)揮著重要作用[2-3]。工作空間是機器人末端執(zhí)行器在工作過程中可以到達的空間點的集合[4]。工作空間屬于運動指標,它代表機器人在工作過程中的活動范圍,可以衡量機器人的性能和工作能力[5]。因此,對機器人的工作空間進行分析和仿真具有重要意義。
白直真等[6]提出基于蒙特卡洛法的機器人工作空間分析與仿真方法,該方法通過D-H法在機器人工作情況的基礎(chǔ)上建立運動學模型,求解并分析機器人的正逆運動學,采用蒙特卡洛法對機器人的工作空間進行分析,并利用MALTAB軟件進行仿真。檀祝新等[7]提出基于SolidWorks的機器人工作空間分析與仿真方法,該方法利用SolidWorks建立機器人三維模型,并在ADAMS中利用模型交換接口導入機器人三維模型對機器人工作空間進行分析,在MATLAB軟件中采用D-H表示法建立正向運動學模型進行相關(guān)仿真工作。上述方法沒有分析機器人在工作過程中的位移變化特點,導致分析結(jié)果與實際不符。
為解決上述方法中存在問題,提出AI賦能時代食品配料機器人工作空間分析與仿真方法,分析機器人在工作過程中位移變化特點,優(yōu)化食品配料機器人工作空間。
1 機器人運動學模型
1.1 位移方程
為獲取機器人動平臺與靜平臺之間的關(guān)系,對機器人結(jié)構(gòu)進行簡化處理,將3根虛擬連桿加到平行四邊形閉環(huán)中,保持靜平臺的姿態(tài)相對穩(wěn)定。建立簡化后機器人模型的靜、動平臺坐標系,如圖1所示。
分別以O(shè)、O’為坐標原點建立靜平臺坐標系和動平臺坐標系,其中AiBi(i=1, 2, 3)是3根長度L1的驅(qū)動桿;BiCi(i=1, 2, 3)是3根長度L2的從動桿;θi(i=1,2, 3)為靜平臺與驅(qū)動桿之間存在的張角;ηi(i=1, 2,3)為X軸與OAj之間的夾角。
令|OAj|=R、|O’Cj|=r,設(shè)Aio表示靜平臺坐標系中點Aj對應(yīng)的位置矢量,其表達式見式(1)。

設(shè)Cio’表示動平臺坐標系中點Ci對應(yīng)的位置矢量,其表達式見式(2)。

其中:

在靜平臺坐標系中,根據(jù)幾何關(guān)系獲得Bi點的位置矢量[8-9],其表達式見式(4)。
設(shè)在O-XYZ坐標系中矢量OO’可用Oo’=[x y z]T進行表示,矢量OCi的表達式見式(5)。

各個矢量在坐標系中的關(guān)系表示為式(6)。

獲得式(7)。

根據(jù)|CiBi|=L2獲得式(8)。

式(8)為機器人動平臺中心點位置與靜平臺張角之間的位移方程,即輸出量與輸入量之間的位移方程[10-11]。
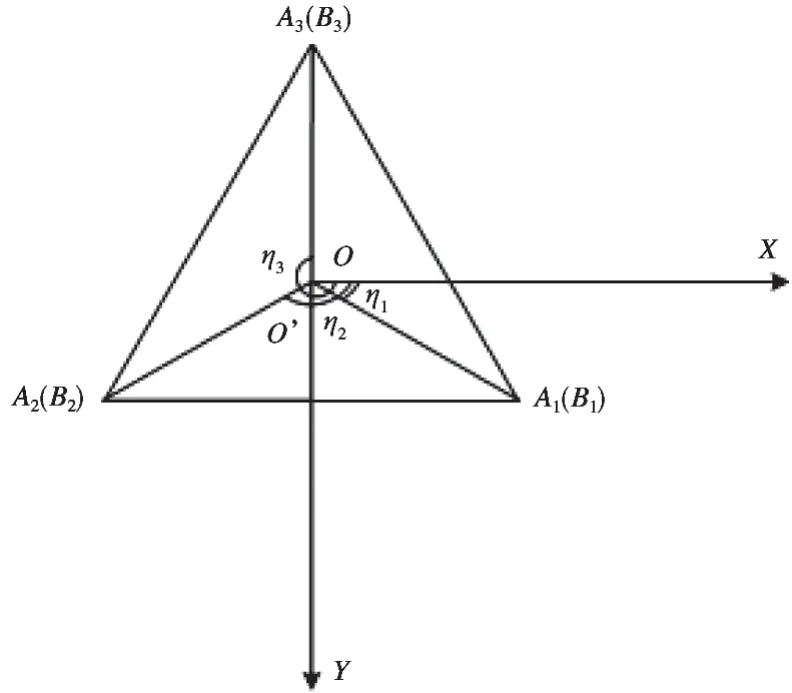
圖1 平臺X-Y坐標系
1.2 逆運動方程
已知機器人位置參數(shù)x、y、z和結(jié)構(gòu)參數(shù)R、r、L1、L2、ηi,相對于靜平臺驅(qū)動桿的輸入角為θi。

令gi=tan(θi/2),此時存在式(9)。式中:系數(shù)Di、Ei、Fi為位置參數(shù)和結(jié)構(gòu)參數(shù)構(gòu)成的已知量,可通過三角函數(shù)關(guān)系獲得[12-13],利用求得的系數(shù)對一元二次方程進行求解,獲得式(10)。

1.3 正運動方程
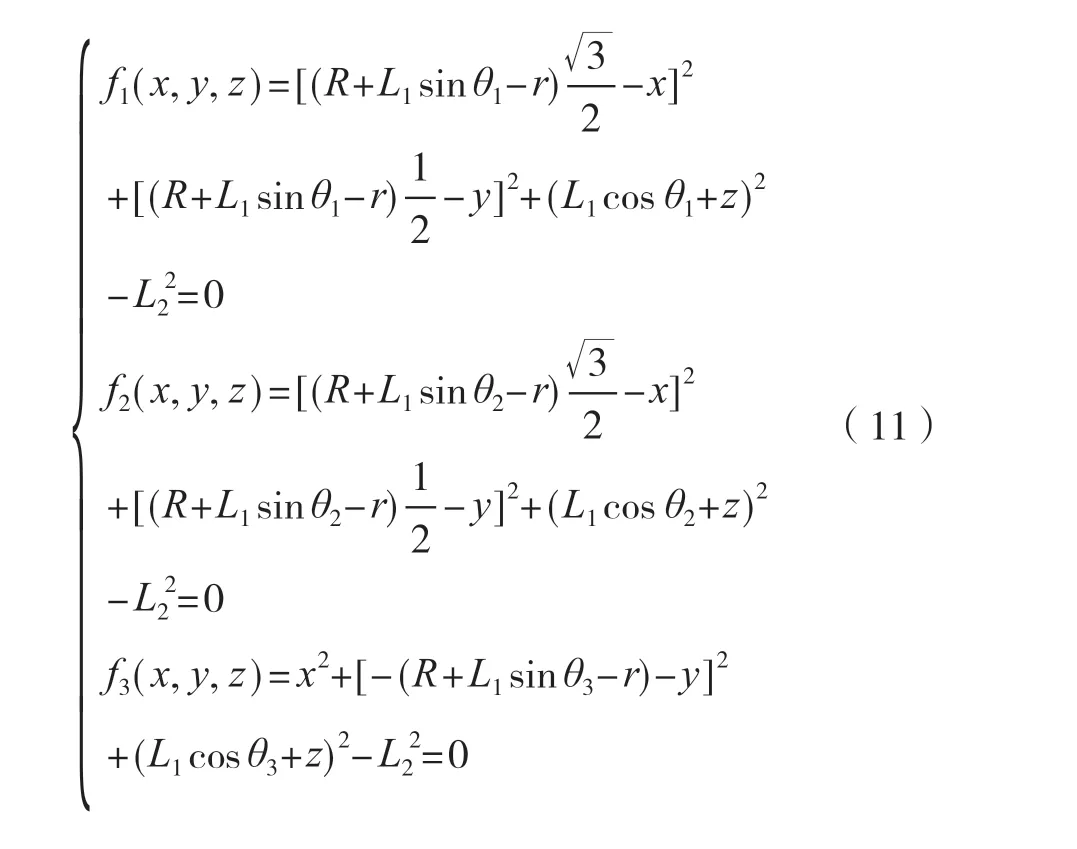
運動學位移方程利用輸入?yún)?shù)θ1、θ2、θ3轉(zhuǎn)變?yōu)榉蔷€性方程組[14-15]:
定義目標函數(shù),對上述非線性方程組進行求解:

2 工作空間
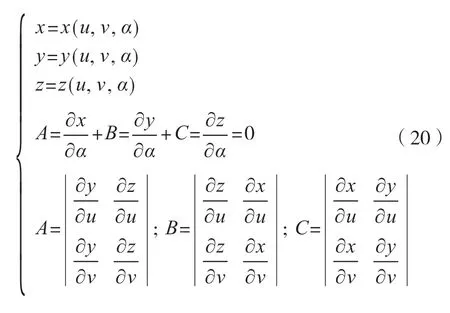
分析機器人在工作空間中的運動特點可知,主要通過機器人末端繞各關(guān)節(jié)做運動的軌跡構(gòu)成的面或線構(gòu)成機器人工作空間W0(Pn)對應(yīng)的邊界面∑W0(Pn)[16-17]。通過上述分析,可以利用若干個機器人末端運動的軌跡公式獲得機器人工作空間的邊界面。
機器人自由度F小于6時,均勻劃分機器人關(guān)節(jié),分別計算參考點在兩組關(guān)節(jié)點中運動曲面對應(yīng)的包絡(luò),獲得機器人運動空間的邊界面W0(Pn)、W0(P3)[20-21]。
雙參數(shù)曲面族是邊界面∑W3(Pn)沿∑W0(Pn)運動獲得的,參考點在末桿上對應(yīng)的工作空間界限曲面W0(Pn)可通過包絡(luò)面公式計算得到[22-23]。
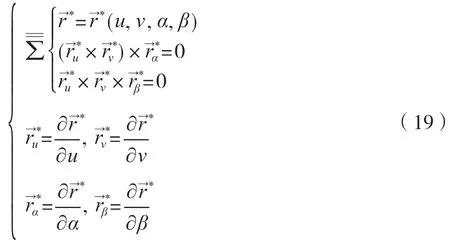
用向量方程描述曲線Г:

式中:t為曲線Г對應(yīng)的幾何參數(shù)。
{Г}表示曲線族,是從曲線Г在空間中以參數(shù)α做運動獲得的,其表達式見式(14)。

獲得{Г}對應(yīng)的包絡(luò)方程:


式中:u、v均為幾何參數(shù)。


將β作為參數(shù)使包絡(luò)在空間中進行運動,獲得二次包絡(luò)的表達式:
3 工作空間分析與仿真
ADAMS軟件是一種機械系統(tǒng)動力學仿真軟件,由美國Mechanical Dynamics公司開發(fā),是全球使用范圍最廣、最具權(quán)威性的仿真軟件,為用戶提供仿真和建模環(huán)境,可對機器人系統(tǒng)進行分析、建模和仿真[25-26]。AI賦能時代食品配料機器人工作空間分析與仿真方法利用ADAMS軟件構(gòu)建食品配料機器人的模型,實現(xiàn)產(chǎn)品的細節(jié)、概念設(shè)計和方案論證,優(yōu)化、修改、實驗規(guī)劃產(chǎn)品方案,并在故障診斷階段獲得高精度、全方位的仿真結(jié)果,能夠提高產(chǎn)品質(zhì)量、降低開發(fā)成本、縮短開發(fā)周期[27]。
ADAMS/Post Processor、ADAMS/solver和ADAMS/View是ADAMS軟件中基本的3個解題程序模塊[28]。
AI賦能時代食品配料機器人工作空間分析與仿真方法通過ADAMS軟件建立機器人機械系統(tǒng)的幾何模型。可以在ADAMS軟件中直接建立食品配料機器人的幾何模型,也可以在ADAMS軟件中通過MECHANISM/Pro軟件導入PRO/E造型建立機器人幾何模型。將運動激勵和力/力矩施加在機器人幾何模型中,進行運動仿真測試,獲得機器人在食品配料工作中的運動情況[29-30]。
在工作范圍內(nèi)任取機器人各關(guān)節(jié)的θi值,計算步長,獲得食品配料機器人的三維外形擬合圖,食品配料機器人在XOY上的投影如圖2所示。
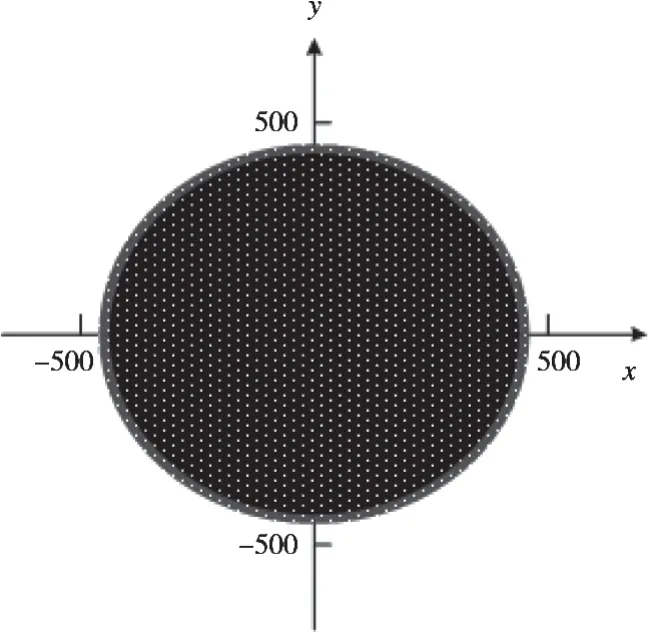
圖2 機器人投影
分析可知,各個關(guān)節(jié)在系統(tǒng)中的機電走線限制和機器人本體設(shè)計參數(shù)都會對機器人的工作空間產(chǎn)生影響。通過仿真獲得的投影圖形與理論計算結(jié)果相符,在理論計算范圍內(nèi)包括產(chǎn)生的點,表明ADAMS機械系統(tǒng)動力學仿真軟件的仿真結(jié)果與計算的機器人工作空間相同。
食品配料機器人工作空間分析與仿真方法利用ADAMS機械系統(tǒng)動力學仿真軟件對食品配料機器人進行運動仿真的主要目的是通過食品配料機器人運動的可視化,驗證食品配料機器人能夠?qū)崿F(xiàn)的運動形式和自由度,獲得食品配料機器人在工作過程中的極限位置,可視化機器人的工作空間,獲得機器人在不同約束條件下的運動特點。分析點在動平臺中速度和位移情況,為食品配料機器人在不同約束條件下運動性能的優(yōu)化提供保障。
食品配料機器人沿Z軸平動、繞Y軸轉(zhuǎn)動、沿Y軸平動過程中的速度、位移曲線如圖3~圖5所示。
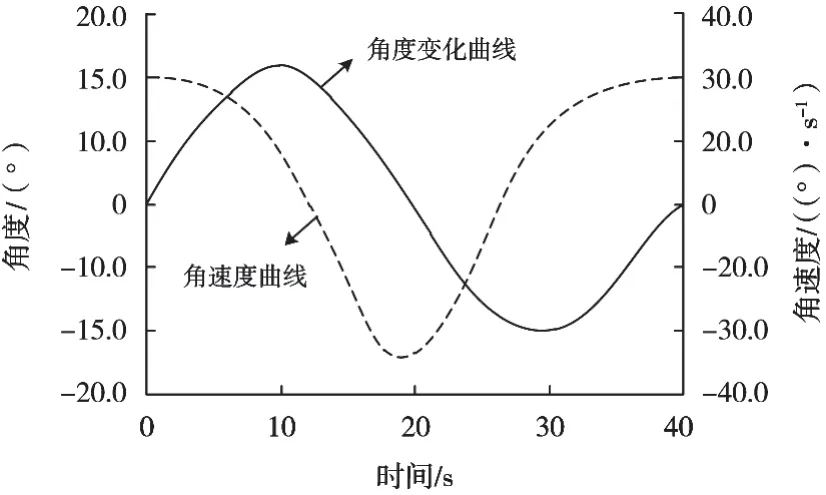
圖3 繞Y軸轉(zhuǎn)動時機器人的角度變化與角速度變化
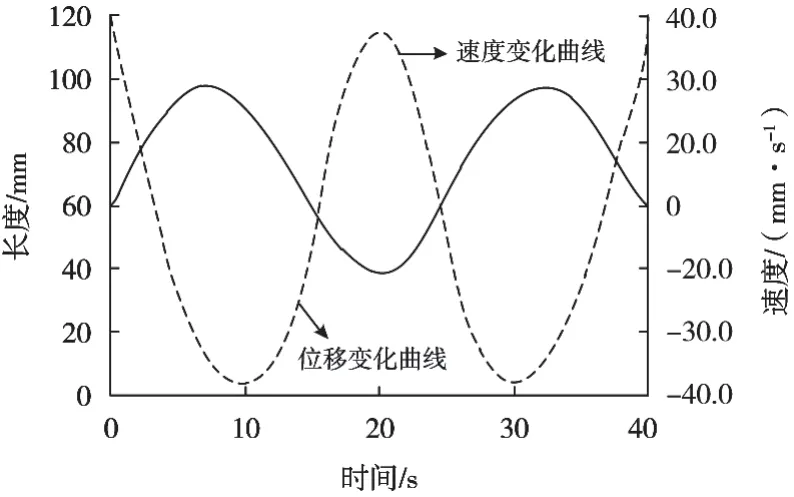
圖4 沿Y軸平動時機器人的位移和速度變化曲線
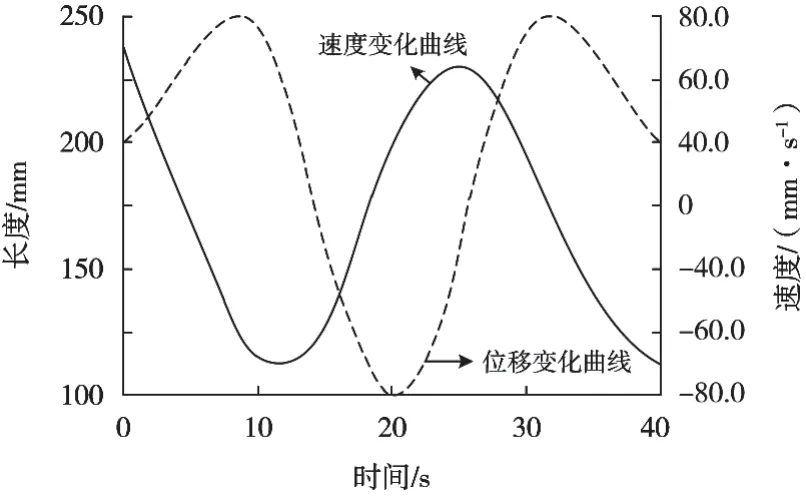
圖5 沿Z軸平動時機器人的位移和速度變化曲線
分析圖3~圖5可知,食品配料機器人的運動平穩(wěn)且連續(xù),在工作過程中的速度曲線和位移曲線都較為光滑,動平臺中心在工作空間中的轉(zhuǎn)動不受角限制,可以實現(xiàn)較大范圍的擺動,在工作空間中動平臺中心點可以到達任意位置。
4 結(jié)語
機器人操作器的工作區(qū)域就是機器人的工作空間,工作空間屬于一種重要指標,可對機器人的性能進行衡量,在AI賦能時代中工作空間是衡量食品配料機器人工作能力的重要指標。設(shè)計食品配料機器人的重要基礎(chǔ)是工作空間分析,機器人的活動空間由工作空間大小決定。在設(shè)計食品配料機器人的過程中,在一定總體尺寸約束下應(yīng)該最大化機器人的工作空間,因此對食品配料機器人工作空間進行分析具有重要意義。上述方法在機器人運動學模型的基礎(chǔ)上對機器人工作空間進行分析,并采用ADAMS機械系統(tǒng)動力學仿真軟件進行仿真,為AI賦能時代食品配料過程中工業(yè)機器人的應(yīng)用提供相關(guān)依據(jù)。
在食品配料過程中應(yīng)用工業(yè)機器人可以降低生產(chǎn)成本、提高生產(chǎn)效率。工業(yè)機器人的發(fā)展方向是智能機器人,在視覺控制的基礎(chǔ)上對工業(yè)機器人的軌跡進行規(guī)劃和設(shè)計,可以提高工業(yè)機器人在食品配料過程中的工作質(zhì)量和效率,建議在食品生產(chǎn)過程中擴大工業(yè)機器人的應(yīng)用范圍。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
民用飛機設(shè)計與研究(2020年4期)2021-01-21 09:15:02
中學生數(shù)理化·七年級數(shù)學人教版(2020年10期)2020-11-26 08:24:50
數(shù)學物理學報(2020年2期)2020-06-02 11:29:24
電子制作(2018年18期)2018-11-14 01:48:24
山東工業(yè)技術(shù)(2016年15期)2016-12-01 05:31:22
光學精密工程(2016年6期)2016-11-07 09:07:19
核科學與工程(2015年4期)2015-09-26 11:59:03
中國中醫(yī)藥現(xiàn)代遠程教育(2014年11期)2014-08-08 13:23:44
終身教育研究(2014年5期)2014-02-28 01:23:06
