面向在軌服務的艙段間機電連接接口研究
2021-06-22 04:47:36孫濤李娟李偉達
機械制造與自動化 2021年3期
孫濤,李娟,李偉達
(蘇州大學 機電工程學院,江蘇 蘇州 215000)
0 引言
大型復雜的航天器具有較高的經濟和社會應用價值,但其成本昂貴、使用價值高,一旦在軌發生故障,損失巨大[1]。而在軌服務技術緩解了這一個困境,不但可以增強航天器在軌自主能力,延長在軌壽命,而且可以保持航天器所執行任務的可持續性。
連接接口作為航天器連接的重要部件,可以保證航天器之間快速、可靠地連接與分離。隨著航天技術迅猛發展,在軌服務任務也趨向于復雜化,其對連接接口的功能和性能要求也逐漸提高。如日本研制的工程試驗衛星(ETS-VII)完成了與空間站自主對接并補給有效載荷的飛行任務,采用抓手-碰鎖式連接接口,主動部分安裝有抓手,被動部分安裝把柄[2];國防科技大學完成了一種反對稱異體同構中心式對接接口的設計,主、被動部分上同時安裝捕獲槍及容納孔[3];Michigan空間公司開發了類桿錐式連接接口ARD、ASDS、AMDS[4]以及SPHERES項目的小型異體同構式連接接口[5]。
為了滿足艙段對接與更換的在軌服務任務需求,本文對一種合作衛星艙段間的機電連接接口進行了研究。
1 方案設計
合作衛星艙段間對接與更換在軌任務順利執行,需要連接接口具備快速連接與分離的能力。首先,連接接口應具備捕獲、調姿、定位、緊固等功能。另外,還應具備電氣連接功能,來實現信號與數據的傳輸。
圖1為新型機電連接接口,分為主動部分與被動部分,分別裝在主動艙段與被動艙段上。機電連接接口主要包括4個模塊:捕獲模塊(用于對被動艙段的抓捕),其基本構形為新型類錐桿式對接接口[6];精對準模塊(用于艙段對接過程的調姿及定位),其主要為銷孔-錐面配合定位方式;電動螺釘緊固模塊(用于艙段對接完成后的緊固),其主要為螺紋連接緊固方式;浮動電氣連接接口模塊(用于電氣接口的連接),其連接方式為螺紋傳動方式。每個單模塊同樣分為主動部分與被動部分,分別裝在主動艙段與被動艙段上。
對接的策略如下:在視覺與測距系統的作用下,輔助機械臂將被動艙段捕獲并使它滿足捕獲容差,中心桿球頭伸入接受腔里與捕獲鎖碰撞后實現捕獲鎖緊,中心桿完成對被動艙段的捕獲動作。中心桿球頭縮回拉近被動艙段,在精對準模塊的作用下,逐步實現兩艙段間姿態偏差的減小并完成精定位;然后,電動螺釘緊固模塊動作實現對被動艙段的鎖緊,兩艙段在機械上完成連接與力封閉;最后,浮動電氣連接接口模塊動作,實現電氣接口的連接。分離過程為上述動作的逆過程,具體而言,就是切斷電氣連接—螺釘解鎖—中心桿伸出、球頭解鎖這一系列動作[7]。
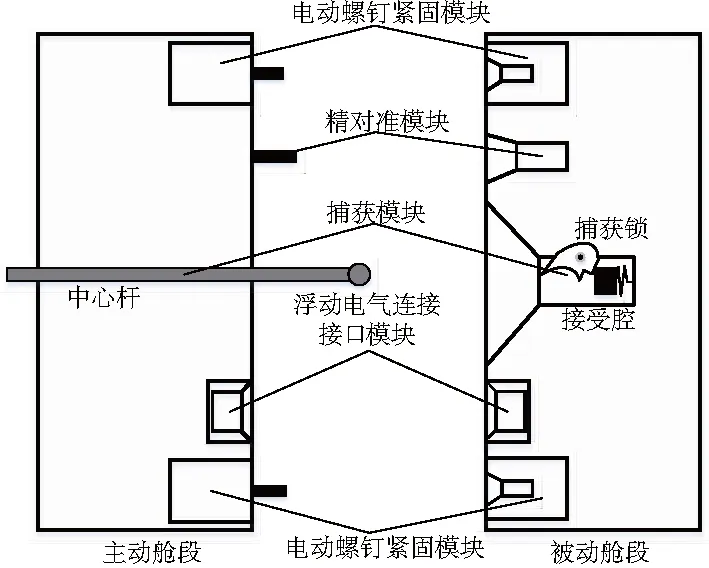
圖1 機電連接接口總體方案圖
2 連接接口容差及指標
容差是指主動艙段能夠對被動艙段進行成功捕獲的合理工作范圍,對于連接接口,應當滿足艙段對接與更換任務中需求的容差指標:徑向位置偏差≮±40mm;角度偏差≮±2°。本文中的容差主要分為位置偏差和角度偏差,容差設計是受幾何外形尺寸直接影響的。如圖2所示,若x軸為接口主動對接方向,被動艙段坐標系相對于主動艙段坐標系分別沿Ox、Oy、Oz軸位置偏差為dx、dy、dz,被動艙段坐標系繞Ox、Oy、Oz軸轉過的角度偏差分別為dθx、dθy、dθz。其中,軸向位置偏差:0≤dx≤l;徑向位置偏差:dy=dz=(D-d)/2;自旋方向角度偏差:dθx=[(k-m)/a]×(180°/π);俯仰、偏航方向角度偏差:dθy=dθz=min[arctan(2h/D),arcsin(l/2L)]。
圖2中l為兩艙段端面初始對接距離;L為艙段外接圓的半徑;d為球頭直徑;D為接受腔錐底直徑;h為接受腔錐體高度;a為精對準柱銷分布圓周半徑;m為精對準柱銷球頭直徑;k為精對準銷孔錐底直徑。
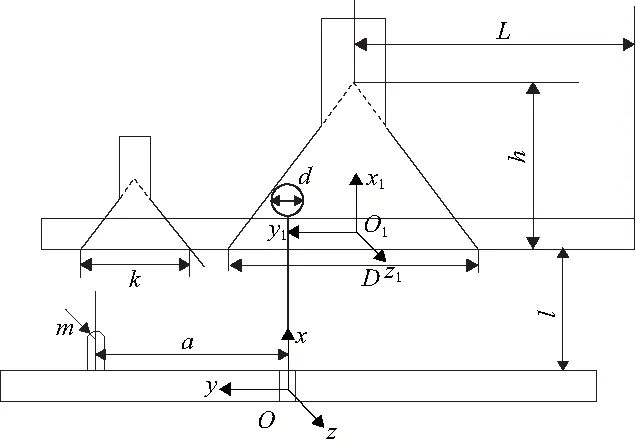
圖2 機構容差描述
3 捕獲過程動力學仿真
3.1 仿真模型建立
本文捕獲過程動力學仿真的目的:用于驗證機構具有一定的捕獲及容差能力,能夠滿足容差指標要求,以此證明機構設計的合理性。
首先,假設主動艙段、被動艙段、中心桿及球頭、接受腔的小變形可以忽略,且都為剛體;將主、被動艙段簡化為結構簡單的立方體結構;將捕獲模塊的主動部分簡化為中心桿和球頭,將捕獲模塊主動部分的直線伸縮運動等效為中心桿與主動艙段之間的直線運動。最后,將捕獲模塊中的抓捕機構簡化為捕獲滑塊,捕獲滑塊通過彈簧與接受腔末端連接,可以沿接受腔末端軸向運動,中心桿球頭通過撞擊滑塊實現捕獲[8]。
建立符合表1 參數的簡化后的幾何模型并導入Adams軟件做動力學仿真分析。導入的模型是無材料特性、無質量、無約束關系的,如圖3所示。首先對模型各零部件添加材料,本接口絕大部分選取鋁合金材料,中心桿和球頭選取不銹鋼材料,質量參數如表2所示。其次,對模型各零部件之間添加約束關系,將中心桿與主動艙段之間添加移動副,捕獲滑塊與接受腔之間添加移動副,并在捕獲滑塊末端與被動艙段端面之間添加彈簧阻尼器,將中心桿球頭與接受腔、捕獲滑塊之間添加接觸力。
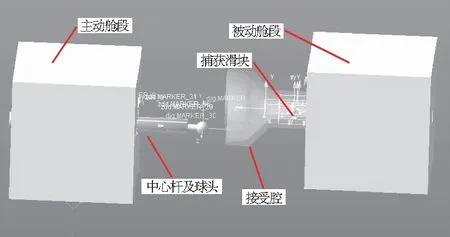
圖3 捕獲過程仿真示意圖
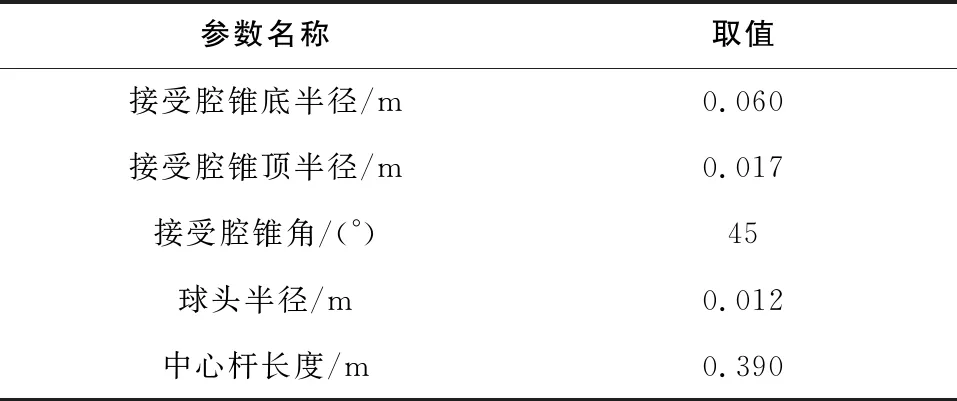
表1 中心桿與接受腔幾何參數
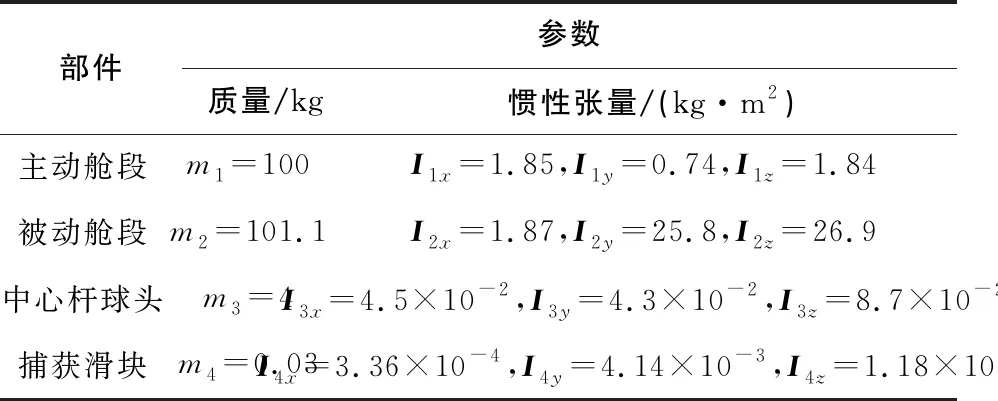
表2 對接系統的質量參數
3.2 工況及分析方法
理想的對接狀態是兩艙段間保持相對靜止狀態且無相對角度和位置偏差。由于本文中的捕獲過程為被動艙段已被輔助機械臂事先控制并送到對接的停靠區域后再由捕獲模塊對其進行二次捕獲的過程,所以在本文中不考慮軸向位置偏差dx,假設dx始終為150mm;因為仿真研究重點為捕獲碰撞過程,不涉及精對準模塊的位姿校正,所以自旋方向的角度偏差dθx也可不考慮。在理想對接狀態下,定義兩艙段間無軸向對接初速度,控制中心桿伸出速度為5mm/s的工況為標準工況[11]。根據容差指標要求,在標準工況的基礎下分別給出了6種工況進行仿真,分析接口的捕獲及容差能力,仿真工況如表3。
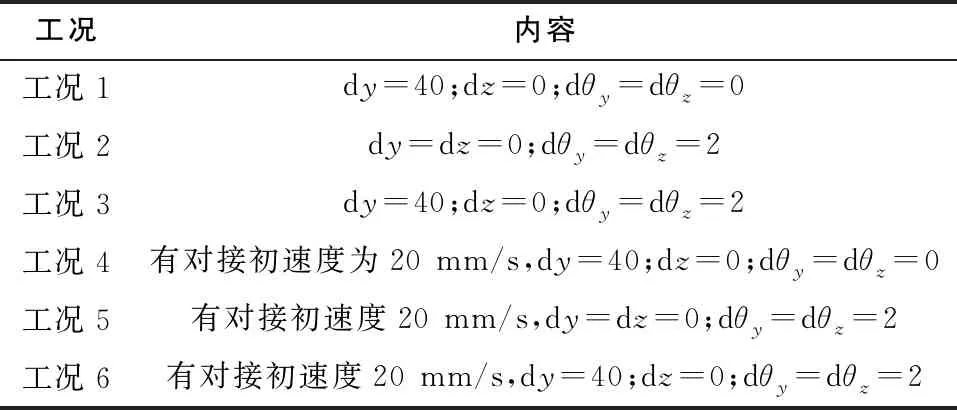
表3 仿真工況
判斷主動艙段能夠捕獲成功的標準是:中心桿球頭沿接受腔內壁滑入捕獲區域且撞擊捕獲滑塊,捕獲滑塊的位移達到5mm后中心桿球頭被鎖緊,捕獲成功。在仿真軟件中給捕獲滑塊添加傳感器[12],用來監測捕獲滑塊受到撞擊后的位移,位移達到5mm后即刻讓仿真停止。
3.3 仿真結果分析
圖4為不同工況下仿真結果曲線變化圖。綜合分析圖4可得,對于全部工況,被動艙段都能夠被成功地捕獲。從圖4(a)可以看出,隨著中心桿的伸出,捕獲距離在持續下降,但由于對接初速度的不同導致曲線下降速率也不同,相應捕獲時間也不同。其中,對于工況1-工況3在球頭未與接受腔發生接觸碰撞之前曲線下降的速率是一樣的,但在接觸碰撞之后由于不同偏差的存在,曲線下降的速率發生變化;從3條曲線對比來看,在接觸碰撞之后工況1與工況3的曲線幾乎重合,工況2與工況3的曲線相比而言差別較大,說明位置偏差對捕獲的影響比角度偏差的影響大。對于工況4-工況6亦是如此,但由于對接初速度的存在,工況4-工況6曲線下降的速率比工況1-工況3曲線下降的速率要快;從3條曲線對比來看,同樣可以說明位置偏差對捕獲距離的影響比角度偏差的影響程度大。
從圖4(b)可以看出,對于全部的工況,中心桿球頭都能撞擊捕獲滑塊并使其位移達到5mm,此時中心桿球頭被鎖緊,捕獲成功。其中,對于無對接初速度時的工況1及工況3,由于中心桿球頭與接受腔之間碰撞使得捕獲滑塊產生了振動和沖擊,但滑塊振幅相對較小;對于有對接初速度時的工況4及工況6,對捕獲滑塊產生了更大的振動和沖擊,滑塊振幅相對較大。雖然主、被動艙段之間加大對接初速度會大大縮短捕獲時間,但這同時也給被動艙段造成了更多的振動與沖擊。
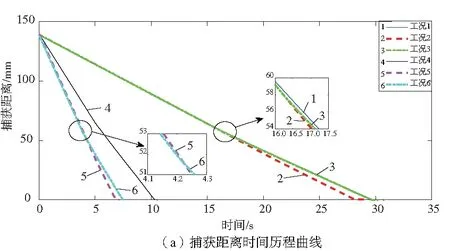
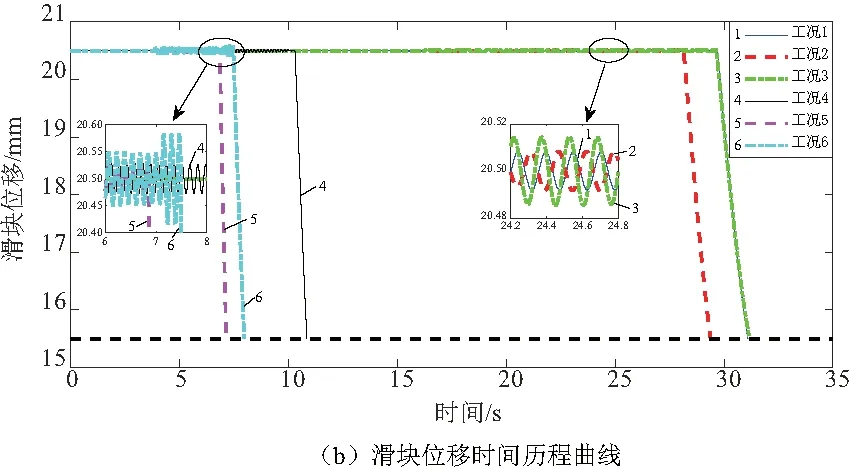
圖4 不同工況下仿真結果曲線變化圖
圖5(a)所示為僅存在位置偏差的對接工況下的容差范圍,位置容差最大可以達到53mm。圖5(b)所示為僅存在角度偏差的對接工況下的容差范圍,角度容差最大可以達到11°。如圖5(c)所示,對接狀態不可能只存在單一偏差,若同時存在綜合偏差時容差的范圍分析比較困難,所以只考慮了在接受腔軸截面內的容差范圍。綜合分析可以得出:此種對接狀態下,在位置容差為±50mm、角度容差為±7°的容差范圍內可以確保被動艙段被成功捕獲。
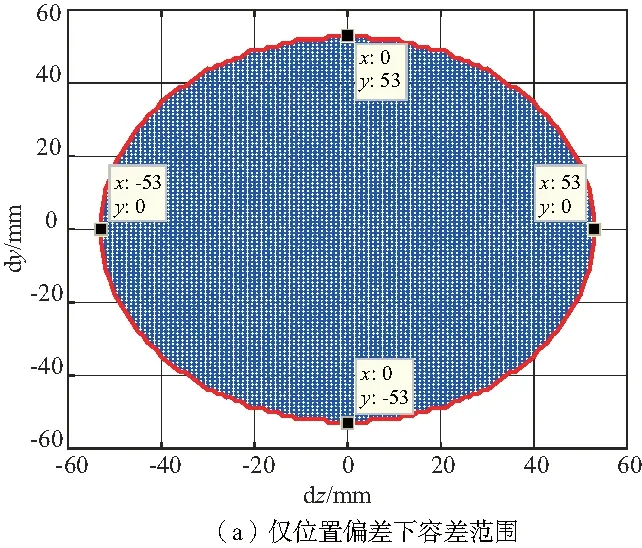
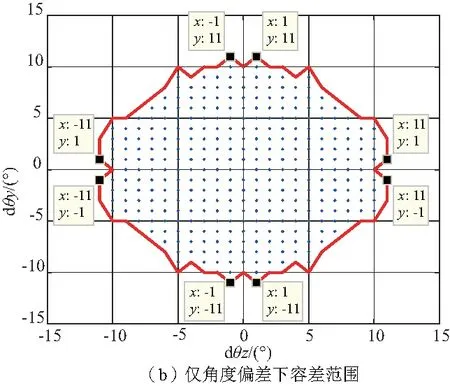
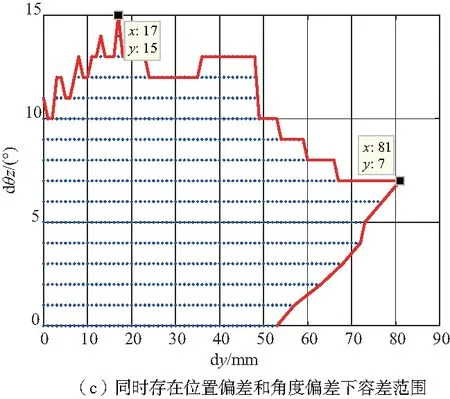
圖5 接口容差范圍仿真結果
4 結語
針對合作衛星艙段間的對接與更換任務,介紹了一種新型機電連接接口。根據容差指標要求給出了連接接口方案設計,通過動力學仿真分析得到了位置容差±50mm、角度容差±7°的容差范圍,驗證了連接接口具有一定的捕獲及容差能力且滿足容差指標要求。
