汽車緊急制動(dòng)行人檢測(cè)系統(tǒng)的設(shè)計(jì)與測(cè)試
2021-06-22 04:47:58姜文龍周金應(yīng)褚觀耀龍軍程前
機(jī)械制造與自動(dòng)化 2021年3期
姜文龍,周金應(yīng),褚觀耀,龍軍,程前
(中國(guó)汽車工程研究院股份有限公司,重慶 401122)
0 引言
我國(guó)每年重特大事故中,交通事故數(shù)和因交通事故死亡人數(shù)分別占69%和78.9%,全球因道路交通事故造成的人員傷亡逐年遞增。為了降低該風(fēng)險(xiǎn)造成的危害,汽車自動(dòng)緊急制動(dòng)系統(tǒng)(autonomous emergency brake,AEB)在汽車上的安裝率也越來(lái)越高[1-2]。
AEB行人系統(tǒng)通過(guò)汽車上的傳感器識(shí)別并跟蹤行人軌跡,若有碰撞危險(xiǎn)則系統(tǒng)發(fā)出預(yù)警信號(hào)并自動(dòng)采取制動(dòng)措施使汽車停止,從而保護(hù)道路環(huán)境中的行人[3-5]。
為了對(duì)AEB系統(tǒng)的性能進(jìn)行系統(tǒng)測(cè)試及評(píng)價(jià),我國(guó)發(fā)布實(shí)施的《中國(guó)新車評(píng)價(jià)規(guī)程(C-NCAP)管理規(guī)則》對(duì)AEB行人系統(tǒng)測(cè)試進(jìn)行了系統(tǒng)規(guī)范[6]。這對(duì)于完善AEB行人系統(tǒng)的標(biāo)準(zhǔn)、降低交通環(huán)境中行人的受傷概率具有實(shí)際的價(jià)值。
為了驗(yàn)證和評(píng)估AEB行人檢測(cè)系統(tǒng)的性能,國(guó)外相關(guān)研究結(jié)構(gòu)開(kāi)發(fā)了多種AEB行人測(cè)試裝置[7-8]。奧地利某公司開(kāi)發(fā)的AEB行人檢測(cè)裝置通過(guò)伺服電機(jī)驅(qū)動(dòng),結(jié)構(gòu)較為緊湊但靈活性較差,實(shí)驗(yàn)操作不便。英國(guó)某公司開(kāi)發(fā)的AEB行人檢測(cè)裝置采用盤式電機(jī)驅(qū)動(dòng),靈活性較好,但成本較高。
上述AEB行人檢測(cè)設(shè)備可以較好地評(píng)估歐美地區(qū)交通環(huán)境下的典型危險(xiǎn)場(chǎng)景,但與我國(guó)道路行人行為習(xí)慣存在較大差距,而且設(shè)備和維護(hù)成本較高,不符合我國(guó)AEB行人系統(tǒng)的開(kāi)發(fā)和測(cè)試要求。
因此,本文針對(duì)我國(guó)AEB行人檢測(cè)系統(tǒng)的測(cè)試需求,設(shè)計(jì)了AEB行人檢測(cè)系統(tǒng),可以很好地契合C-NCAP的測(cè)試規(guī)定。系統(tǒng)測(cè)試場(chǎng)景可基于我國(guó)行人習(xí)慣靈活調(diào)整,并通過(guò)多次測(cè)試進(jìn)行有效性驗(yàn)證。測(cè)試結(jié)果表明,所設(shè)計(jì)的AEB行人檢測(cè)系統(tǒng)滿足相關(guān)測(cè)試要求,可以作為AEB功能測(cè)評(píng)和相關(guān)產(chǎn)品開(kāi)發(fā)的支撐工具。
1 系統(tǒng)整體方案設(shè)計(jì)
1.1 AEB行人系統(tǒng)測(cè)試
針對(duì)AEB行人測(cè)試系統(tǒng),C-NCAP測(cè)試規(guī)程設(shè)定了4種典型測(cè)試場(chǎng)景[9]:遠(yuǎn)端碰撞CVFA-50、CVFA-25和近端碰撞CVNA-25、CVNA-75。
如圖1所示,假人目標(biāo)與測(cè)試車輛中心線兩者之間的水平距離為D=6m(遠(yuǎn)端)和D=4m(近端)。測(cè)試汽車行駛速度vv分別為20km/h、30km/h、40km/h、50km/h、60km/h。假人移動(dòng)速度vp分別為5km/h、 6.5km/h,其移動(dòng)方向與測(cè)試汽車呈垂直狀態(tài),在汽車頭部寬度的25%處(M點(diǎn))、50%(C點(diǎn))和75%處(K點(diǎn))分別進(jìn)行碰撞測(cè)試。

圖1 測(cè)試場(chǎng)景示意圖
C-NCAP規(guī)范中的AEB行人測(cè)試場(chǎng)景是基于歐美地區(qū)交通事故數(shù)據(jù)建立的,與我國(guó)行人交通習(xí)慣存在較大差異,為此需建立適合我國(guó)行人交通行為的測(cè)試方案,因此設(shè)定如下兩種測(cè)試場(chǎng)景[10-11]:
1)近距離測(cè)試場(chǎng)景(CPN):汽車速度為5~25km/h,假人和測(cè)試汽車的距離為7m。
2)遠(yuǎn)距離測(cè)試場(chǎng)景(CPF):測(cè)試汽車速度為10~60km/h(以10km/h為間隔),假人與測(cè)試汽車的距離為20m。假人移動(dòng)速度為5.4km/h,碰撞位置為汽車50%位置處。
1.2 測(cè)試方案設(shè)計(jì)
針對(duì)C-NCAP以及行人測(cè)試相關(guān)的規(guī)定,行人檢測(cè)系統(tǒng)應(yīng)當(dāng)具有如下功能:
1)目標(biāo)假人可在驅(qū)動(dòng)系統(tǒng)的作用下沿一定速度行駛;
2)駕駛機(jī)器人能夠控制汽車按一定的速度和路線行駛;
3)為了使假人與測(cè)試汽車發(fā)生指定位置的碰撞,假人與測(cè)試汽車互聯(lián)互通,保持實(shí)時(shí)通信。
根據(jù)上述的功能需求,設(shè)計(jì)了如圖2所示的測(cè)試過(guò)程。將假人固定在托板上,借助牽引帶驅(qū)動(dòng)假人和托板移動(dòng),并在假人驅(qū)動(dòng)系統(tǒng)和測(cè)試汽車上安裝通信設(shè)備,借助實(shí)時(shí)動(dòng)態(tài)基準(zhǔn)站完成汽車與假人速度、位置的信息交互,滿足測(cè)試場(chǎng)景的碰撞要求。
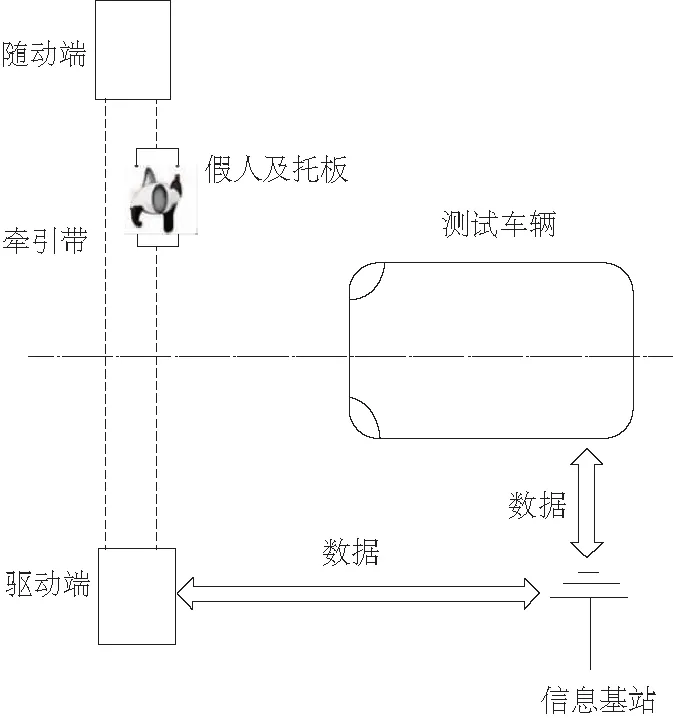
圖2 系統(tǒng)方案架構(gòu)
根據(jù)C-NCAP的規(guī)定,假人移動(dòng)速度分別為5km/h、5.4km/h、6.5km/h,測(cè)試車速在5~60km/h范圍內(nèi),汽車行駛方向與假人移動(dòng)方向保持垂直。
2 硬件實(shí)現(xiàn)過(guò)程
2.1 假人目標(biāo)優(yōu)化
如圖3所示,基于C-NCAP的尺寸規(guī)定分別設(shè)計(jì)了成人假人目標(biāo)和兒童假人目標(biāo),并在假人表面涂抹紅外反射二氧化鈦IR-1000,能夠在850~910nm范圍內(nèi)使假人的紅外反射率達(dá)到40~60%,有效提升了假人的視覺(jué)和紅外特性[12]。

圖3 假人目標(biāo)優(yōu)化
2.2 假人目標(biāo)驅(qū)動(dòng)機(jī)構(gòu)
假人驅(qū)動(dòng)機(jī)構(gòu)分為牽引帶、驅(qū)動(dòng)和隨動(dòng)端以及托板。其中,托板上配置磁鐵單元,可以讓假人支撐桿借助磁性的作用與托板緊密結(jié)合,以便支撐假人直立移動(dòng),其結(jié)構(gòu)如圖4所示。當(dāng)測(cè)試汽車碰撞到假人時(shí),磁性連接中斷,假人脫離托板,避免損壞其他部件。
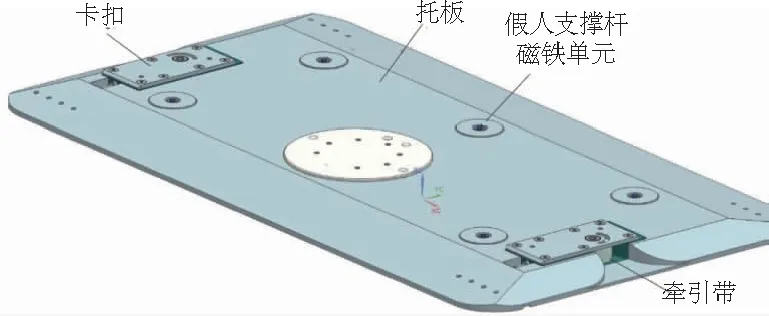
圖4 托板結(jié)構(gòu)
如圖5所示,牽引帶驅(qū)動(dòng)端的組成部分主要有電源、無(wú)線通信部分、控制器以及驅(qū)動(dòng)電機(jī)。

圖5 驅(qū)動(dòng)端結(jié)構(gòu)
假人目標(biāo)驅(qū)動(dòng)系統(tǒng)結(jié)構(gòu)如圖6所示,汽車速度和位置信息由無(wú)線通信模塊傳遞給控制器,控制器根據(jù)獲取的數(shù)據(jù)驅(qū)動(dòng)電機(jī)運(yùn)轉(zhuǎn),帶動(dòng)牽引帶開(kāi)始工作,實(shí)現(xiàn)假人位置的移動(dòng)。

圖6 假人目標(biāo)驅(qū)動(dòng)系統(tǒng)
3 開(kāi)發(fā)控制系統(tǒng)
3.1 系統(tǒng)的控制策略
按照AEB測(cè)試法規(guī)要求,在控制汽車的自動(dòng)駕駛機(jī)器人上安裝慣性導(dǎo)航儀和差分精確定位裝置,分別測(cè)量汽車的實(shí)時(shí)加速度、速度、偏航角以及汽車的精確位置,并通過(guò)無(wú)線通信模塊,最終將收集的數(shù)據(jù)傳輸?shù)紸EB行人檢測(cè)系統(tǒng)。
AEB行人檢測(cè)系統(tǒng)對(duì)比測(cè)試規(guī)程對(duì)汽車速度、假人速度以及碰撞位置的規(guī)定,計(jì)算假人應(yīng)當(dāng)啟動(dòng)的精確時(shí)間。
假人在移動(dòng)過(guò)程中,驅(qū)動(dòng)裝置可以根據(jù)測(cè)試汽車的狀態(tài)和位置,實(shí)時(shí)通過(guò)驅(qū)動(dòng)電機(jī)進(jìn)行加減速控制,最終使假人和測(cè)試汽車的運(yùn)動(dòng)關(guān)系符合測(cè)試法規(guī)的要求,發(fā)生指定位置的碰撞測(cè)試。
AEB行人檢測(cè)系統(tǒng)和自動(dòng)駕駛機(jī)器人之間有兩個(gè)通信通道,通過(guò)915MHz信道頻率,實(shí)時(shí)動(dòng)態(tài)(RTK)基準(zhǔn)站可將GPS定位信息發(fā)送到AEB行人檢測(cè)系統(tǒng)以及汽車的駕駛機(jī)器人。通過(guò)2.4GHz信道頻率,駕駛機(jī)器人則將汽車的位置、速度信息傳輸?shù)紸EB行人檢測(cè)系統(tǒng)(圖7)。

圖7 AEB行人檢測(cè)通信及控制過(guò)程
3.2 設(shè)計(jì)差分定位模塊
一般GPS定位誤差>3m,不能滿足測(cè)試要求的精度,為此借助差分定位方法來(lái)精確定位汽車和假人目標(biāo)[13]。差分定位模塊分為RTK基準(zhǔn)站和移動(dòng)站兩大部分。RTK基準(zhǔn)站放置在空曠的區(qū)域,在測(cè)試汽車和假人目標(biāo)上均安裝移動(dòng)站。RTK基準(zhǔn)站收集基本的GPS定位數(shù)據(jù),然后將信息傳輸給移動(dòng)站,移動(dòng)站基于自身的GPS定位信息和RTK基準(zhǔn)站發(fā)送的GPS定位信息,通過(guò)載波相位差分解算的方法,最終獲得cm級(jí)的定位信息,進(jìn)而控制駕駛機(jī)器人和假人目標(biāo)驅(qū)動(dòng)系統(tǒng),滿足測(cè)試場(chǎng)景對(duì)兩者相對(duì)運(yùn)動(dòng)的要求。
3.3 設(shè)計(jì)假人驅(qū)動(dòng)控制器
AEB行人檢測(cè)系統(tǒng)控制器通過(guò)接收測(cè)試汽車的位置、速度信息,實(shí)時(shí)分析、比較汽車實(shí)時(shí)位置是否與控制器計(jì)算要求的觸發(fā)點(diǎn)保持一致,以此判斷是否驅(qū)動(dòng)假人開(kāi)始移動(dòng)。假人移動(dòng)觸發(fā)后,通過(guò)采用與測(cè)試場(chǎng)景相匹配的電機(jī)驅(qū)動(dòng)算法,控制器可以實(shí)現(xiàn)對(duì)假人位置的精確控制。控制器的主控芯片(STM32F767)可以接受各模塊發(fā)送的數(shù)據(jù)信息并進(jìn)行處理,被控芯片(STM32F103)可以精確地控制電機(jī)轉(zhuǎn)速。圖8是控制器的結(jié)構(gòu)和相關(guān)模塊。
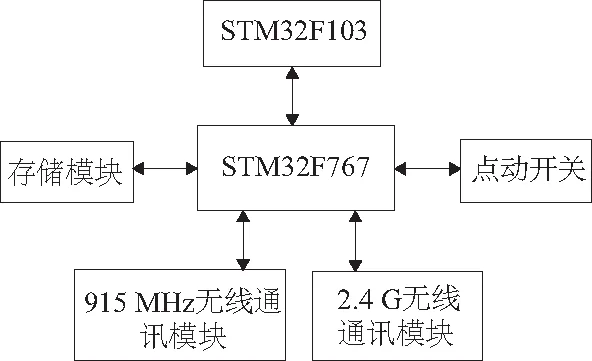
圖8 控制器結(jié)構(gòu)
3.4 假人驅(qū)動(dòng)算法
AEB行人測(cè)試場(chǎng)景中,假人有加速、勻速以及減速的不同過(guò)程,這就要求對(duì)假人的速度進(jìn)行精確控制,以便將假人傳送到指定的位置。為此設(shè)計(jì)如圖9所示的驅(qū)動(dòng)控制算法,將加減速過(guò)程細(xì)化為減減速階段、加減速階段、勻速階段、減加速階段以及加加速階段,并且加速度變化率保持恒定。
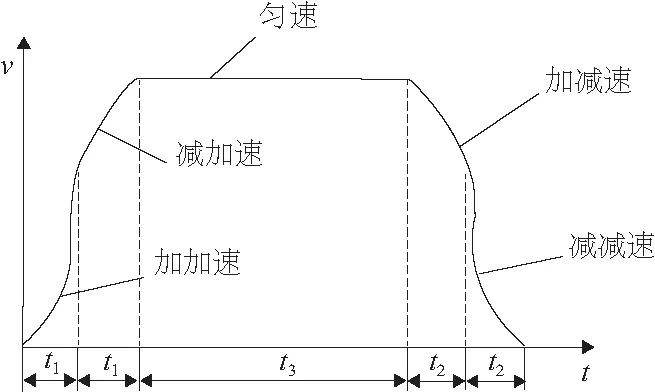
圖9 S型曲線加減速模型
設(shè)vs為初速度,ve為末速度,根據(jù)運(yùn)動(dòng)學(xué)關(guān)系,假人的加速度a、速度v以及位移S計(jì)算公式如表1所示。

表1 參數(shù)計(jì)算公式
3.5 系統(tǒng)綜合控制
1)計(jì)算系統(tǒng)觸發(fā)點(diǎn)。基于差分精確定位系統(tǒng)和假人移動(dòng)站,獲取假人初始位置P0的坐標(biāo)(x1,y1),碰撞點(diǎn)P1坐標(biāo)(x2,y2)。同時(shí)由移動(dòng)站獲取汽車頭部中點(diǎn)處坐標(biāo)V1(x3,y3)和航向角R。由車速v和假人到碰撞點(diǎn)所需的時(shí)間T(D1/Vp),計(jì)算得出系統(tǒng)觸發(fā)點(diǎn)M的坐標(biāo)(x4,y4)。
2)調(diào)整測(cè)試汽車的姿態(tài)和位置。計(jì)算車頭中心點(diǎn)V1與直線MP1的距離D2和汽車航向角R與MR1的夾角δ。測(cè)試汽車的駕駛機(jī)器人根據(jù)D2和δ的變化,控制方向盤進(jìn)行轉(zhuǎn)動(dòng),從而使汽車的航向角和位置滿足測(cè)試要求[14]。
3)系統(tǒng)綜合測(cè)試。駕駛機(jī)器人系統(tǒng)實(shí)時(shí)更新汽車車頭中心點(diǎn)V1(x3,y3)的坐標(biāo),并發(fā)送相關(guān)數(shù)據(jù)至AEB行人檢測(cè)系統(tǒng),然后由AEB行人檢測(cè)系統(tǒng)綜合比較V1點(diǎn)與M點(diǎn),當(dāng)x3=x4并且y3=y4時(shí),驅(qū)動(dòng)假人移動(dòng),并按測(cè)試場(chǎng)景的要求調(diào)節(jié)電機(jī)轉(zhuǎn)速,使得汽車達(dá)到P1點(diǎn)時(shí),假人移動(dòng)到P1點(diǎn)。系統(tǒng)綜合控制示意如圖10所示。
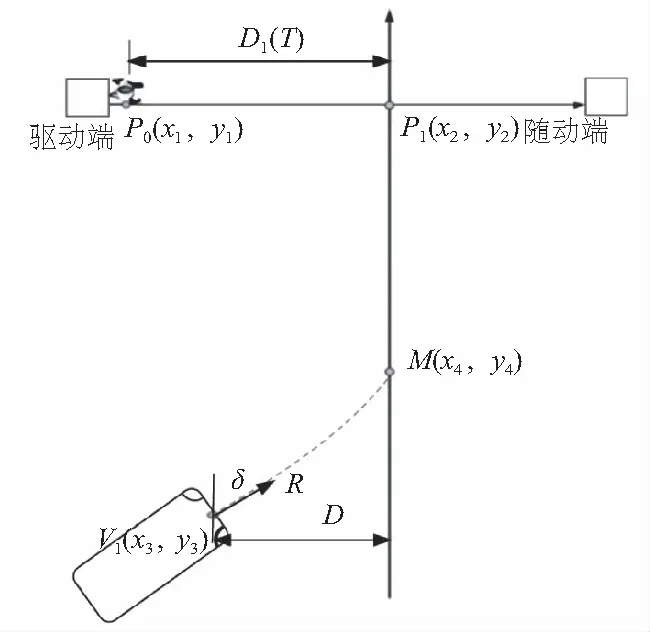
圖10 系統(tǒng)綜合控制示意圖
4 系統(tǒng)測(cè)試及驗(yàn)證
為了對(duì)AEB行人檢測(cè)系統(tǒng)進(jìn)行驗(yàn)證,本文按照C-NACP規(guī)定的行人測(cè)試場(chǎng)景進(jìn)行了行人危險(xiǎn)工況測(cè)試實(shí)驗(yàn),以驗(yàn)證AEB行人檢測(cè)系統(tǒng)對(duì)假人目標(biāo)位置、速度的控制精度以及AEB行人檢測(cè)系統(tǒng)與測(cè)試汽車的無(wú)線通信性能。
如圖11所示,首先進(jìn)行單功能測(cè)試,在不同測(cè)試場(chǎng)景下,AEB行人檢測(cè)系統(tǒng)不與駕駛機(jī)器人聯(lián)動(dòng),測(cè)試電機(jī)控制算法對(duì)假人的驅(qū)動(dòng)控制精度。每種測(cè)試場(chǎng)景進(jìn)行3次實(shí)驗(yàn)。由于不同測(cè)試場(chǎng)景下假人與測(cè)試汽車的距離要求不同,一共完成了(4+11)×3=45次實(shí)驗(yàn),相關(guān)測(cè)試結(jié)果如表2所示。基于實(shí)驗(yàn)結(jié)果計(jì)算出假人目標(biāo)控制精度達(dá)到96%(控制精度=符合要求實(shí)驗(yàn)測(cè)試/總實(shí)驗(yàn)次數(shù))。由此表明,本文所設(shè)計(jì)的AEB行人檢測(cè)系統(tǒng)可以根據(jù)測(cè)試要求對(duì)假人移動(dòng)過(guò)程實(shí)現(xiàn)精確控制。

圖11 AEB行人單功能測(cè)試

表2 假人移動(dòng)速度和位移測(cè)試
如圖12所示,在單功能測(cè)試完成后,將AEB行人檢測(cè)系統(tǒng)與駕駛機(jī)器人聯(lián)通,測(cè)試兩者之間的無(wú)線通信性能,查看假人與測(cè)試汽車的碰撞點(diǎn)是否滿足測(cè)試場(chǎng)景的法規(guī)要求。

圖12 AEB行人檢測(cè)系統(tǒng)聯(lián)動(dòng)測(cè)試
根據(jù)C-NCAP測(cè)試規(guī)程進(jìn)行20次實(shí)驗(yàn)(測(cè)試車速在20~60km/h范圍,每種測(cè)試場(chǎng)景進(jìn)行5次實(shí)驗(yàn)),根據(jù)國(guó)內(nèi)測(cè)試場(chǎng)景要求進(jìn)行11次實(shí)驗(yàn),共進(jìn)行31次測(cè)試實(shí)驗(yàn),測(cè)試結(jié)果如表3所示。表中的數(shù)字表示第幾次實(shí)驗(yàn)完全達(dá)到測(cè)試場(chǎng)景規(guī)定的碰撞速度、位置等關(guān)鍵指標(biāo)。
根據(jù)表3的統(tǒng)計(jì)情況可知,1次實(shí)驗(yàn)即達(dá)到要求的概率為90%,2次實(shí)驗(yàn)即達(dá)到要求的概率為100%。
在測(cè)試過(guò)程中,AEB行人檢測(cè)系統(tǒng)對(duì)假人速度以及假人與測(cè)試汽車碰撞位置的準(zhǔn)確度達(dá)到96%。由于地面摩擦力不均及牽引帶的彈性,在單功能測(cè)試45次實(shí)驗(yàn)中,有2次出現(xiàn)誤差大于精度有效范圍的情況,但其綜合誤差仍然較小,可以滿足測(cè)試法規(guī)對(duì)于精度的要求。

表3 AEB行人檢測(cè)系統(tǒng)聯(lián)動(dòng)測(cè)試次數(shù)
在對(duì)AEB行人檢測(cè)系統(tǒng)和駕駛機(jī)器人進(jìn)行聯(lián)動(dòng)測(cè)試中,除了3次由于AEB行人檢測(cè)系統(tǒng)與駕駛機(jī)器人的無(wú)線通信被其他設(shè)備干擾外,兩者之間的無(wú)線通信始終保持良好。由此可知,應(yīng)當(dāng)在空曠無(wú)干擾的環(huán)境下進(jìn)行AEB行人測(cè)試實(shí)驗(yàn)。在無(wú)其他通信干擾的情況下,AEB行人檢測(cè)系統(tǒng)可以較好地與駕駛機(jī)器人進(jìn)行聯(lián)動(dòng)測(cè)試。
綜上所述,本文設(shè)計(jì)的AEB行人檢測(cè)系統(tǒng)可以用于C-NCAP和中國(guó)行人測(cè)試場(chǎng)景,相較于國(guó)外的AEB行人檢測(cè)系統(tǒng),本文設(shè)計(jì)的測(cè)試系統(tǒng)具有如下的優(yōu)勢(shì):
1)AEB行人檢測(cè)系統(tǒng)的控制參數(shù)可以靈活調(diào)整,滿足國(guó)內(nèi)交通場(chǎng)景的行人檢測(cè)測(cè)試要求。
2)整個(gè)系統(tǒng)成本較低,可供更多的AEB行人測(cè)試和研發(fā)單位使用,有助于推進(jìn)AEB行人檢測(cè)系統(tǒng)更新提升。
本文的AEB行人檢測(cè)系統(tǒng)也存在一定的不足。比如,假人目標(biāo)沒(méi)有考慮雷達(dá)的反射特性;此外,對(duì)歐洲新車評(píng)估規(guī)程(E-NCAP)等國(guó)外測(cè)試規(guī)范沒(méi)有很好的適用性。
5 結(jié)語(yǔ)
本文設(shè)計(jì)了一種AEB行人檢測(cè)系統(tǒng),可以根據(jù)C-NCAP和AEB行人測(cè)試的法規(guī)要求,對(duì)假人移動(dòng)過(guò)程的進(jìn)行精準(zhǔn)控制,實(shí)現(xiàn)了AEB行人檢測(cè)系統(tǒng)與駕駛機(jī)器人的實(shí)時(shí)無(wú)線通信。
根據(jù)測(cè)試實(shí)驗(yàn)結(jié)果可知,本文設(shè)計(jì)的AEB行人檢測(cè)系統(tǒng)對(duì)假人目標(biāo)的速度和位移控制精度達(dá)到96%,與駕駛機(jī)器人的聯(lián)動(dòng)測(cè)試一次成功率達(dá)到90%。所開(kāi)發(fā)的假人目標(biāo)具備人體特征及紅外反射特性,能夠用于行人危險(xiǎn)工況的測(cè)試實(shí)驗(yàn),其測(cè)試精度較高,是汽車AEB系統(tǒng)功能測(cè)評(píng)和相關(guān)產(chǎn)品開(kāi)發(fā)的有效支撐工具。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
兒童時(shí)代·快樂(lè)苗苗(2017年7期)2018-01-24 18:28:45
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
海峽科技與產(chǎn)業(yè)(2016年3期)2016-05-17 04:32:12
作文大王·低年級(jí)(2016年4期)2016-04-18 00:24:37
