九條嶺水文站AI 智能水位圖像識別系統與人工觀測水位比測分析
2021-07-02 14:36:30梁捷
甘肅科技 2021年8期
梁 捷
(甘肅省武威水文水資料勘測局,甘肅 武威 733000)
1 AI 智能水位圖像識別系統簡介
AI 智能水位圖像識別系統是一套利用智能化攝像頭,采用計算機圖像處理識別技術和深度學習模型,依托海量的、高質量的訓練數據,為防汛減災、水情信息采集提供一套完整的解決方案。
該系統打破了傳統的水位測量方式,采用AI技術自動處理視頻、圖像文件,通過對視頻、圖像的處理、分析和理解,實現水位智能識別和分析,提供了包括自動監視、閾值設置、自動判斷多水尺識別和智能告警等服務。
AI 智能水位圖像識別系統采用了定時識別和根據水位變幅加測識別相結合的方式進行實時水位識別。九條嶺水文站基本水尺斷面布設多支水尺監測水位,該系統會根據當前圖像中水位情況自動切換水尺識別水位。系統配備數據監控管理軟件平臺,可利用網頁、手機APP 進行數據的查詢,并能以Excel 文件導出水位數據。
2 AI 智能圖像識別水位與人工觀測水位比測分析
為保證AI 智能圖像識別水位數據準確并符合《水位觀測標準(GB/T 50138-2010)》規定,巡測隊成員對AI 智能圖像識別水位與人工觀測水位進行了比測,對比測過程中發現的問題進行了整改。
2.1 比測方法
根據水位觀測標準(GB/T 50138-2010),計算綜合不確定度,判斷是否符合標準6.2.3 比測結果應符合下列規定:
一般水位站,置信水平95%的綜合不確定度應為3cm,系統誤差應為±1cm;波浪問題突出的近海地區水位站,綜合不確定度可放寬至±5cm。
計算方法:
1)E.0.3 水位觀測總隨機不確定度和總系統不確定度分別按照下式計算:
(1)當水位觀測隨機誤差有相互獨立的若干項E′1、E′2……E′n時,水位觀測總隨機不確定度按下式計算:

式中:X′1、X′2、……X′n—E′1、E′2……E′n的各單項隨機不確定度。
(2)當水位觀測的不定系統誤差有相互獨立若干項E′′1、E′′2……E′′時,水位觀測總系統不確定度應按下式計算:
式中:X′′1、X′′2、……X′′n—E′′1、E′′2……E′′n、的各單項系統隨機不確定度。
2)E.0.6 采用自動監測設備監測水位時,其不確定度需按下列方法計算:
(1)系統不確定度按下式計算:

式中:Pyi——自動監測水位;
Pi——人工校測水位;
N——校測次數。
(2)隨機不確定度按下式計算:
(3)綜合不確定度應按下式計算:

2.2 第一階段比測
2.2.1 比測過程
首先分別對6 月、7 月AI 智能圖像識別水位與人工觀測水位進行了比測。AI 智能圖像識別水位按6 段制挑選出與人工觀測水位相對應的時間段次(水位對比過程線如圖1、圖2 所示)。
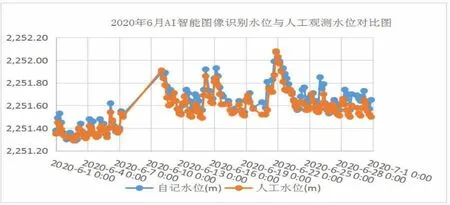
圖1 6 月AI 智能識別水位與人工觀測水位對比
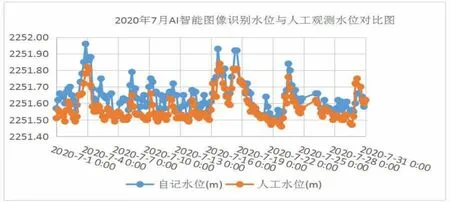
圖2 7 月AI 智能識別水位與人工觀測水位對比
第一階段比測結果(見表1)。

表1 第一階段比測結果
2.2.2 第一階段比測結論
通過計算,6 月、7 月綜合不確定度均超出3cm,不符合規定。
2.2.3 原因分析
通過6 月、7 月AI 智能圖像識別水位與人工觀測水位對比圖,可以看出AI 智能圖像識別水位整體高于人工觀測水位。從網頁中調取AI 智能識別水位圖片可以看出,水尺雍水及波浪是產生誤差的主要原因。
AI 智能水位圖像識別系統首選靠近河心水尺進行識別,水尺完全淹沒后才會選取上一支水尺進行識別。由于河心流速較大,產生的雍水及波浪的問題同樣較大。
2.2.4 解決方案
對每支水尺設置最高觀測水位,解決系統識別水尺完全被淹沒后才會選取上一支水尺進行識別的弊端。通過計算分析,對九條嶺水文站基本水尺斷面每支水尺設置了最高讀數(見表2)。

表2 水尺最高讀數統計表
經與廠家技術人員溝通后,此方案可以實施。
2.3 第二階段比測
2.3.1 比測過程
對AI 智能水位圖像識別系統按照方案整改后,我們對8 月18 日至9 月18 日的智能圖像識別水位與人工觀測水位再次進行了比測(水位對比過程線如圖3 所示)。

圖3 8 月18 日~9 月18 日AI 智能識別水位與人工觀測水位對比
第二階段比測結果(見表3):
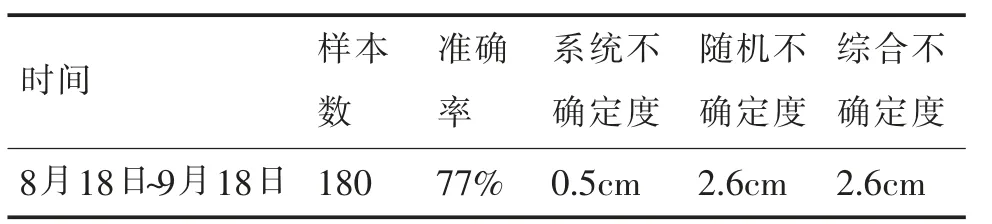
表3 水尺最高讀數統計表
2.3.2 第二階段比測結論
通過8 月18 日至9 月18 日智能圖像識別水位與人工觀測水位對比圖,可以看出AI 智能圖像識別水位和人工觀測水位過程一致。經計算,綜合不確定度未超出3cm,符合《水位觀測標準》(GB/T 50138-2010)規定。
3 結論
通過對九條嶺水文站AI 智能水位圖像識別系統的比測與分析,得出此系統具有較好的穩定性、準確性。建議在其他水文站安裝運行,為水文巡測工作提供保障。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
表面工程與再制造(2019年6期)2019-08-24 06:40:04
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32