
一種基于連桿機(jī)構(gòu)的仿生四足爬壁機(jī)器人設(shè)計(jì)
2021-07-20 05:31:42王思遠(yuǎn)
科技創(chuàng)新與應(yīng)用 2021年19期
關(guān)鍵詞:結(jié)構(gòu)
王思遠(yuǎn)
(河北工程大學(xué),河北 石家莊056002)
爬壁機(jī)器人是一種始于20世紀(jì)60年代的機(jī)器人,世界上最早的爬壁機(jī)器人是由日本西亮(Nishi AKira)教授所研制的一種負(fù)壓吸附爬壁機(jī)器人。由于爬壁機(jī)器人可以在水平豎直乃至天花板等地自由的移動,從上世紀(jì)80年代起,爬壁機(jī)器人開始逐漸被應(yīng)用于實(shí)際的生產(chǎn)活動之中,例如最早出現(xiàn)的負(fù)壓吸附爬壁機(jī)器人,目前已被廣泛應(yīng)用于墻壁清潔,墻壁質(zhì)量檢測乃至反恐偵查等領(lǐng)域。時至今日,隨著人們對于爬壁機(jī)器人的重視程度逐漸提高,自爬壁機(jī)器人誕生以來的60年中,產(chǎn)生了諸如磁吸附、旋翼吸附、仿生吸附等眾多新型的吸附方式,大大拓展了爬壁機(jī)器人的可應(yīng)用范圍,在最近的十年里,人們對仿生吸附爬壁機(jī)器人的研究熱情逐年高漲,不僅因其科幻感十足的外表,更因?yàn)榉律辣跈C(jī)器人在體型以及吸附原理上的優(yōu)勢,可以代替人類深入裂縫、坍塌物、深井、充滿煙塵等眾多危險空間內(nèi)完成諸如勘探、偵查、質(zhì)檢一類的任務(wù)。本文以壁虎(gecko)作為仿生對象,設(shè)計(jì)了一種基于連桿機(jī)構(gòu)的仿生四足爬壁機(jī)器人,本文將就仿生爬壁機(jī)器人的原理及發(fā)展、基于連桿機(jī)構(gòu)的仿生四足爬壁機(jī)器人設(shè)計(jì)進(jìn)行闡述,最后進(jìn)行了展望與總結(jié)。
1 仿生爬壁機(jī)器人的原理及發(fā)展
1.1 仿生爬壁機(jī)器人的原理
仿生爬壁機(jī)器人的吸附原理可分為兩類,干吸附及濕吸附。
吸附時不涉及粘附液體的分泌。僅依靠生物足部的剛毛結(jié)構(gòu)與壁面間接觸時產(chǎn)生的范德華力(van der waals force)進(jìn)行吸附的吸附方式被稱為干吸附。以壁虎(gecko)為例,壁虎的腳趾有許多褶皺,在這些褶皺上緊密地分布著許多剛毛,在每根剛毛的頂部又細(xì)分出許多絨毛,在壁虎需要將足部吸附在墻壁上時,壁虎會將腳趾向內(nèi)彎曲,使褶皺上的剛毛與壁面緊密接觸,由于剛毛的數(shù)量眾多且結(jié)構(gòu)細(xì)微,因而可以很好地適應(yīng)墻壁上諸如凹坑一類的結(jié)構(gòu)起伏,在保證剛毛與墻壁間的接觸面積后,剛毛頂部的絨毛會產(chǎn)生足夠大的分子間作用力,即范德華力(van der waals force),保證了壁虎與墻體間的緊密吸附;當(dāng)壁虎需要與壁面間脫附時,會將腳趾向外彎曲,這時褶皺張開,減少了剛毛結(jié)構(gòu)與壁面的接觸面積,從而減小了足底與墻壁間的范德華力(van der waals force),由此即可實(shí)現(xiàn)腳底與壁面間的脫附。壁虎依靠這種獨(dú)特的腳趾內(nèi)翻-外翻機(jī)制,可以實(shí)現(xiàn)在墻壁上的快速移動,并且可以保護(hù)自身脆弱的剛毛結(jié)構(gòu)不受損壞,如圖1和圖2。
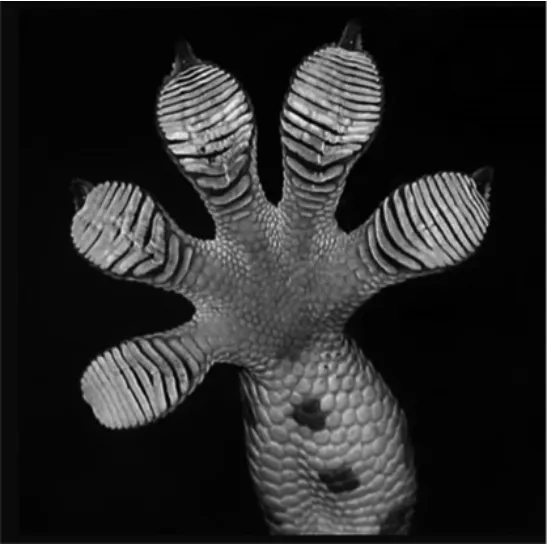
圖1 壁虎腳掌結(jié)構(gòu)圖
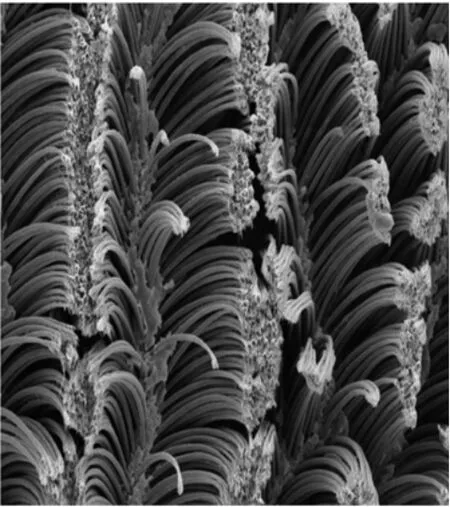
圖2 壁虎足底剛毛
依靠動物分泌的吸附液體與壁面進(jìn)行吸附的吸附方式稱為濕吸附。以樹蛙為例,樹蛙腳趾上有許多多邊形結(jié)構(gòu),粘附液體可以從這些多邊形結(jié)構(gòu)的縫隙中流出,使樹蛙腳底形成多邊形結(jié)構(gòu)-粘附液-墻壁的三層結(jié)構(gòu),保證了吸附的強(qiáng)度。
1.2 仿生爬壁機(jī)器人的發(fā)展
目前各國研究的重點(diǎn)一般為干吸附爬壁機(jī)器人,濕吸附由于其設(shè)計(jì)粘附液的分泌,目前濕吸附爬壁機(jī)器人的研究領(lǐng)域尚少有人涉足。目前比較有代表性的干粘附仿生爬壁機(jī)器人如美國斯坦福大學(xué)研制的Stickybot[1](圖3),中國南航大學(xué)戴振東教授研究的一系列壁虎仿生爬壁機(jī)器人等等。這類機(jī)器人如上文所述,采用范德華力(van der waals force)進(jìn)行吸附;除了以壁虎為仿生對象以外,劉彥偉與其團(tuán)隊(duì)還研究了一種爪刺式仿尺蠖爬壁機(jī)器人[2](圖4)和一種仿生爪刺式雙足爬壁機(jī)器人[3](圖5),這類機(jī)器人利用爪刺刺入墻體內(nèi)或懸掛在墻壁的凸起上進(jìn)行吸附,對于墻體的表面質(zhì)量有一定程度的要求。

圖3 Stickybot
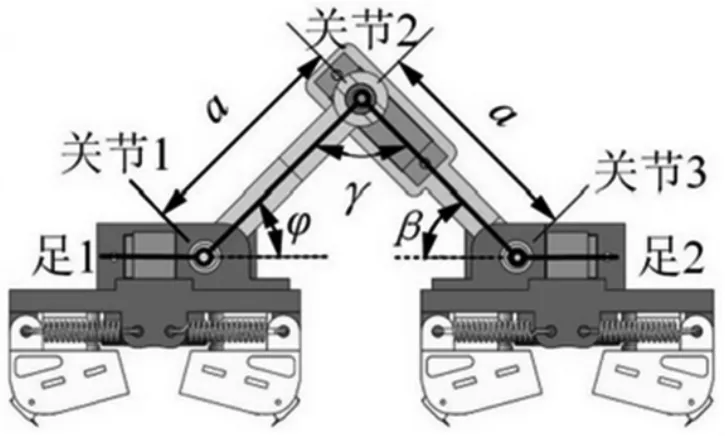
圖4 一種爪刺式仿尺蠖爬壁機(jī)器人
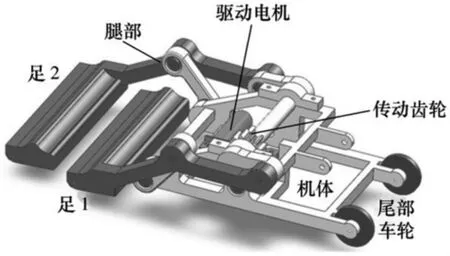
圖5 一種仿生爪刺式雙足爬壁機(jī)器人
2 一種基于連桿機(jī)構(gòu)的仿生四足爬壁機(jī)器人設(shè)計(jì)
本設(shè)計(jì)以壁虎(gecko)為仿生對象,設(shè)計(jì)了一種基于連桿機(jī)構(gòu)的仿生四足爬壁機(jī)器人,經(jīng)過一些調(diào)查后,發(fā)現(xiàn)目前常見的一些仿生四足爬壁機(jī)器人設(shè)計(jì)中存在著一些問題,其一,在模仿仿生目標(biāo)運(yùn)動時,往往需要依賴大量舵機(jī)以模仿仿生目標(biāo)在運(yùn)動時關(guān)節(jié)的運(yùn)動,如李達(dá)等人研制的一種類壁虎機(jī)器人[4],為了模仿壁虎的抬腿及前伸等動作,用到的舵機(jī)多達(dá)12個,過多的使用舵機(jī)會導(dǎo)致機(jī)器人控制的復(fù)雜化,同步性差,增加調(diào)試難度,導(dǎo)致機(jī)器人運(yùn)動時的穩(wěn)定性降低,并且會造成機(jī)器人負(fù)載過重;其二,目前常見的類壁虎爬壁機(jī)器人較少采用壁虎腳趾的內(nèi)翻-外翻機(jī)制作為脫附機(jī)制,而是單純的采用抬升-撕裂的脫附方式,導(dǎo)致剛毛結(jié)構(gòu)在使用一段時間后會由于過度的撕裂而被破壞,影響粘附效果。
本設(shè)計(jì)針對上述問題,創(chuàng)新性地應(yīng)用連桿機(jī)構(gòu)和一種由Hongtao Zhao等人設(shè)計(jì)的電熱敏執(zhí)行器(ETSA)[5]到機(jī)器人的設(shè)計(jì)中,設(shè)計(jì)出的機(jī)器人結(jié)構(gòu)精巧,傳動可靠,可以作為上述問題的解決方案。
2.1 機(jī)器人的整體結(jié)構(gòu)
結(jié)合圖6,如圖7所示,本設(shè)計(jì)由頭部-1,右前腿-2,舵機(jī)1-3,前身-4,電源-5,右后腿-6,舵機(jī)2-7,尾巴-8,舵機(jī)3-9,左后腿-10,后身-11,腰部-12,左前腿-13,舵機(jī)4-14組成。
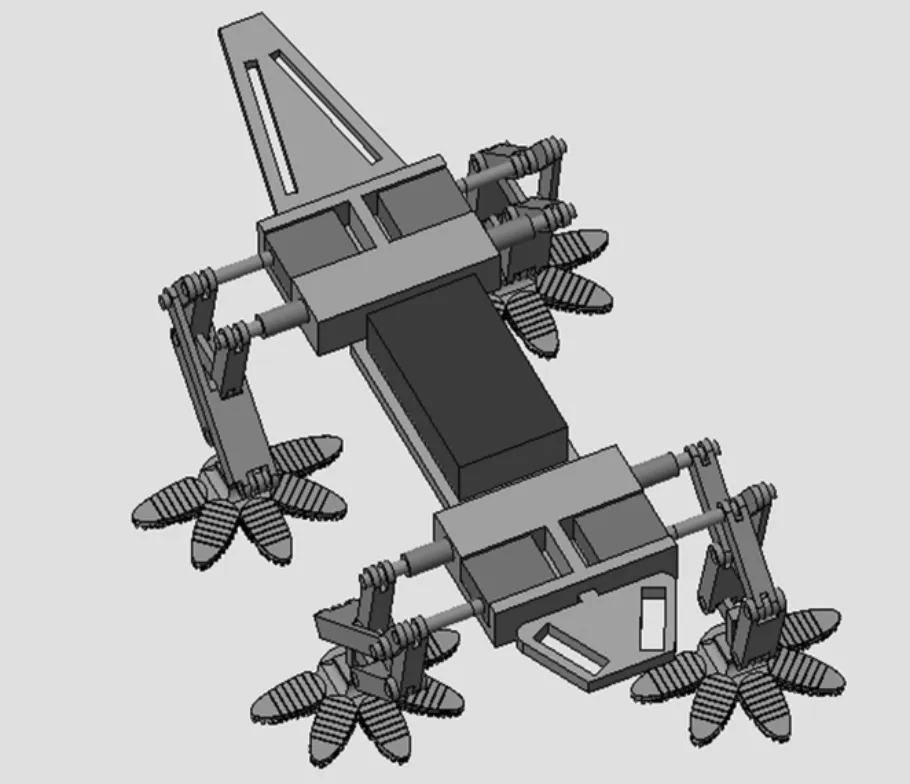
圖6 機(jī)器人整體結(jié)構(gòu)概覽
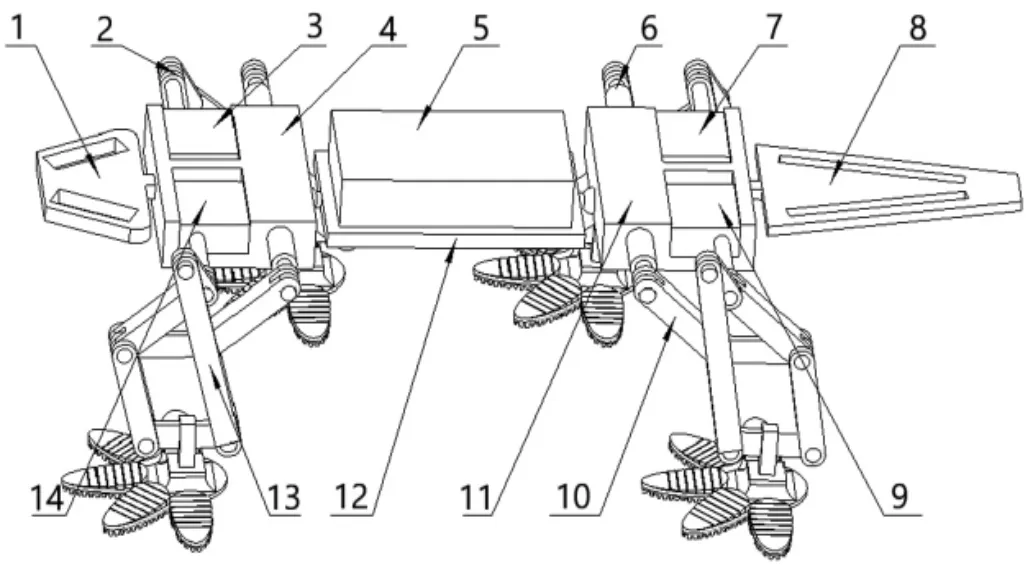
圖7 機(jī)器人整體結(jié)構(gòu)圖
機(jī)器人的四條腿均通過懸臂梁與身體相接。在安裝時為了實(shí)現(xiàn)機(jī)器人行走時的對角步態(tài),機(jī)器人的左前腿與右前腿,左后腿和右后腿,原動節(jié)安裝時存在180°的角度差,而同側(cè)的前腿與后腿原動節(jié)在安裝時不存在角度差。為了使機(jī)器人在運(yùn)動以及站立時更加平穩(wěn),前后同側(cè)的機(jī)器人腿部用了反裝的方式,即彎曲方向相反。
機(jī)器人的前身-4與后身-11在與腰部-12連接時均采用球形關(guān)節(jié)連接,這樣可以使機(jī)器人在運(yùn)動時避免遇到由于壁面高度落差而引起足部無法著地的情況。
機(jī)器人的頭部-1與尾巴-8分別安裝在前身-4與后身-11上,起裝飾作用,同時尾巴-8還起到平衡機(jī)器人身體的作用。
2.2 機(jī)器人的腿部構(gòu)造
如圖8至圖11所示,外伸梁-15,25,33,49,原動節(jié)-23,24,34,42,傳動節(jié)-22,27,35,48,中間節(jié)1-17,31,37,45,中間節(jié)2-18,28,39,46,從動節(jié)1-21,32,36,43,從動節(jié)2-16,26,41,50,從動節(jié)3-20,30,38,44,足部-19,29,40,47。
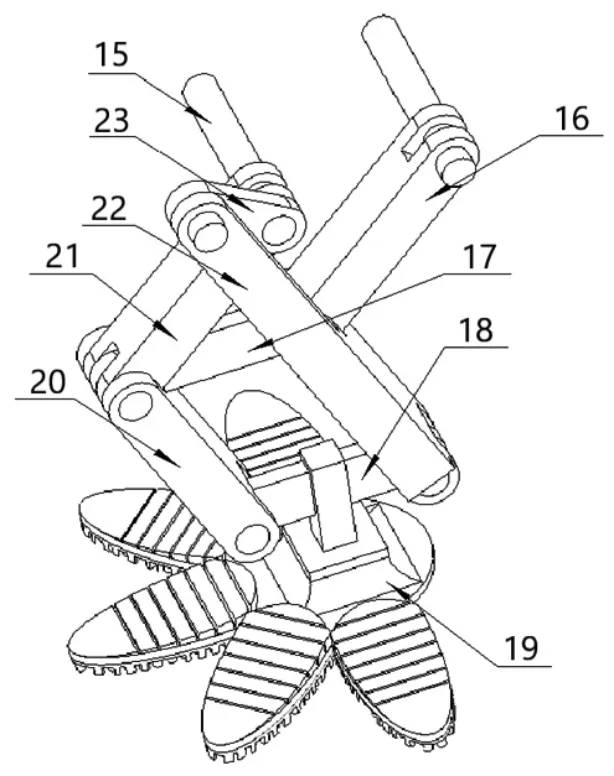
圖8 機(jī)器人左前腿
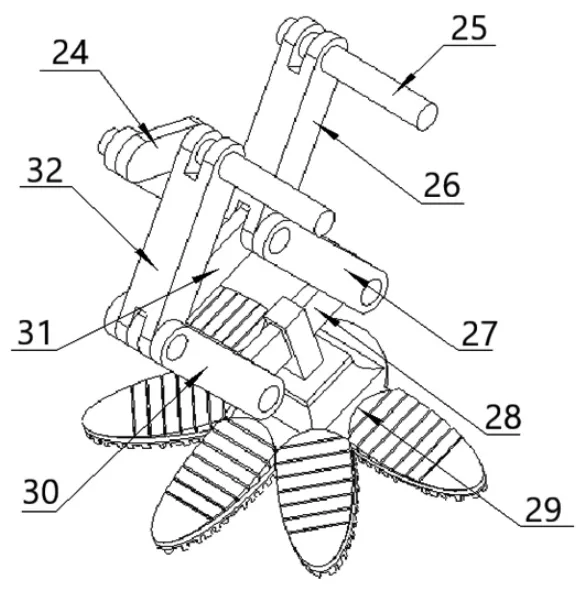
圖9 機(jī)器人右前腿
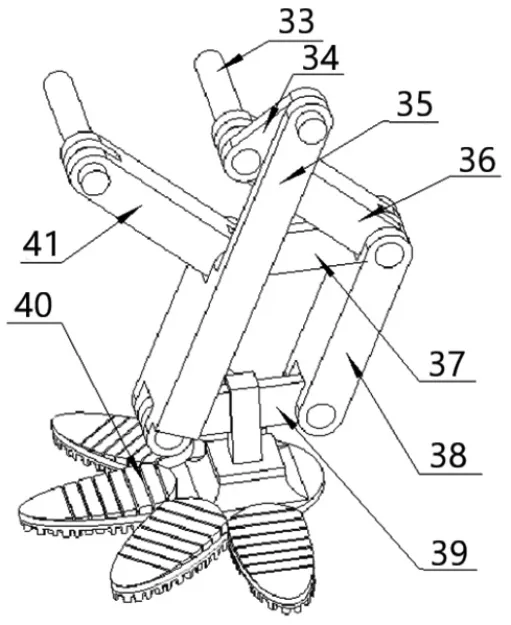
圖10 機(jī)器人左后腿
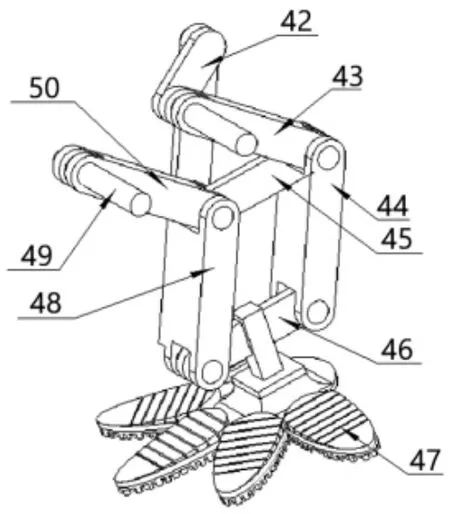
圖11 機(jī)器人右后腿
本設(shè)計(jì)采用切比雪夫連桿機(jī)構(gòu),腿部各節(jié)長度比例為原動節(jié)∶中間節(jié)∶從動節(jié)∶傳動節(jié)=1∶2∶2.5∶5。由于切比雪夫連桿可以在單一動力源的作用下同時完成機(jī)器人腿部的上下抬升以及前后運(yùn)動,故整個機(jī)器人僅需4個舵機(jī)即可實(shí)現(xiàn)整個運(yùn)動過程,十分方便可靠,除此之外,由于機(jī)器人采用腿足式的移動機(jī)構(gòu),擁有很強(qiáng)的跨障性
2.3 機(jī)器人足部構(gòu)造
如圖12,機(jī)器人足部由吸附剛毛-51,電熱敏執(zhí)行器(ETSA)-52,導(dǎo)向溝槽-53三部分構(gòu)成,電熱敏執(zhí)行器是一種雙晶片執(zhí)行器,在一定大小的電壓作用下,可以產(chǎn)生十分強(qiáng)大的阻斷力,進(jìn)而使機(jī)器人足部腳趾處沿垂直于導(dǎo)向凹槽的方向彎曲,以達(dá)到模仿壁虎腳趾外翻使足底與墻壁脫附的效果,當(dāng)停止施加電壓時,電熱敏執(zhí)行器會恢復(fù)原先平直的狀態(tài),由于機(jī)器人足底由橡膠材質(zhì)做成,有絕緣性且富有彈性,故當(dāng)電熱敏執(zhí)行器恢復(fù)平直時,機(jī)器人腳趾也會恢復(fù)初始狀態(tài),這一過程可以視作對于壁虎腳趾內(nèi)翻的模仿;通過如此的內(nèi)翻-外翻機(jī)制,可以保護(hù)機(jī)器人足底脆弱的剛毛結(jié)構(gòu)不受破壞,延長機(jī)器人的使用壽命。機(jī)器人足底的剛毛吸附結(jié)構(gòu)由聚二甲基硅氧烷(PDMS)制成,這種材料具有疏水性,在機(jī)器人足部剛毛結(jié)構(gòu)接觸到液體時,液體會裹挾剛毛中的雜質(zhì)變?yōu)橐旱位鋭偯箼C(jī)器人足底的剛毛結(jié)構(gòu)具有一定的自清潔性,提高機(jī)器人吸附結(jié)構(gòu)的使用壽命。單根剛毛結(jié)構(gòu)是截面為正六邊形的柱狀結(jié)構(gòu),剛毛長徑比10:1,長度為4 μm,邊長為400nm,剛毛間距為0.6μm,交錯排列。
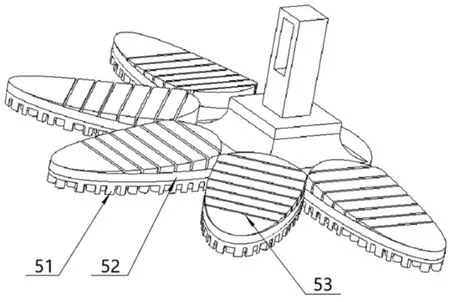
圖12 機(jī)器人足部
2.4 機(jī)器人的運(yùn)動過程
如圖7所示,此狀態(tài)可以視為機(jī)器人的初始狀態(tài),此時四只足均處于吸附狀態(tài),在運(yùn)動開始時,右前足-29和左后足-40首先脫附,兩腿在舵機(jī)-3,9的驅(qū)動下同時向前運(yùn)動。機(jī)器人腿部運(yùn)動的傳遞路線為:懸臂梁→原動節(jié)→連動節(jié)→中間節(jié)→從動節(jié)。
在運(yùn)動開始時,由電源5向右前足29及左后足40的雙晶片驅(qū)動器52施加一定大小的電壓使雙晶片驅(qū)動器52開始工作使右前足29和左后足40的腳趾開始沿垂直于導(dǎo)向溝槽53的方向彎曲,使兩腳與壁面脫附,之后舵機(jī)帶動原動節(jié)24和原動節(jié)34開始轉(zhuǎn)動,由此帶動右前腿2和左后腿10完成前邁進(jìn)的動作,與此同時左前足19和右后足47保持吸附狀態(tài),在舵機(jī)帶動下原動節(jié)23和原動節(jié)42開始轉(zhuǎn)動,由此帶動左前腿13和右后腿6后蹬同時抬升身體,當(dāng)右前腿2和左后腿10運(yùn)動到前極限位置(如圖13編號4)時,左前腿13和右后腿6運(yùn)動到后極限位置(如圖13編號6),這時四只腳處于同一水平高度,使剛才處于懸空狀態(tài)的右前足29和左后足40再度接觸壁面并粘附,這之后在電源5施加的電壓作用下左前足19與右后足47的雙晶片驅(qū)動器52開始工作,使左前足19和右后足47腳趾開始沿垂直于導(dǎo)向溝槽53的方向彎曲,使兩足與壁面脫附,脫附后在舵機(jī)作用下原動節(jié)23和原動節(jié)42開始轉(zhuǎn)動,由此帶動左前腿13和右后腿6完成向前邁進(jìn)的動作,與此同時右前足29和左后足40保持吸附狀態(tài),在舵機(jī)帶動下原動節(jié)24和原動節(jié)34開始轉(zhuǎn)動,由此帶動右前腿2和左后腿10后蹬同時抬升身體,當(dāng)左前腿13和右后腿6運(yùn)動到前極限位置時(如圖13編號4),右前腿2和左后腿10運(yùn)動到后極限位置(如圖13編號6),這時四只腳處于同一水平高度,使剛才處于懸空狀態(tài)的左前足19和右后足47再度接觸壁面并粘附。至此,機(jī)器人恢復(fù)初始位態(tài),機(jī)器人的一次運(yùn)動周期結(jié)束。

圖13 切比雪夫連桿的運(yùn)動狀態(tài)圖
3 結(jié)束語
作為一種近十年來新興的爬壁機(jī)器人種類,仿生吸附爬壁機(jī)器人由于其小巧的體型,對于吸附壁面表面質(zhì)量要求低等諸多優(yōu)勢,可以深入坍塌物的縫隙、深井、充滿煙塵的區(qū)域等極其危險的領(lǐng)域代替人類進(jìn)行作業(yè),因而可以被很好地應(yīng)用在軍事偵察、救援、勘探、質(zhì)檢、清潔等方面,在未來具有很廣闊的發(fā)展前景,但因目前對于仿生爬壁機(jī)器人的研究還處于起步階段,在諸如粘附結(jié)構(gòu)的研究制作上還有較大的欠缺,這導(dǎo)致了目前爬壁機(jī)器人的載重能力較弱,并且由于目前的小型供電電池尚無法滿足爬壁機(jī)器人長時間的功耗需求,因此目前仿生爬壁機(jī)器人往往需要用導(dǎo)線連接固定電源以保證其用電需求,這大大限制了爬壁機(jī)器人的運(yùn)動范圍。在未來的研究中,應(yīng)將重點(diǎn)放在此處。
本文設(shè)計(jì)的基于連桿機(jī)構(gòu)的仿生四足爬壁機(jī)器人具有結(jié)構(gòu)簡單,控制容易,運(yùn)行穩(wěn)定的特點(diǎn),且因其自身質(zhì)量很小,可以在自身載重允許的范圍內(nèi)對其功能進(jìn)行擴(kuò)展,應(yīng)用在諸如偵查、墻壁質(zhì)量檢測、玩具等領(lǐng)域中。
猜你喜歡
小獼猴智力畫刊(2023年4期)2023-04-23 08:49:58
哲學(xué)評論(2021年2期)2021-08-22 01:53:34
中華詩詞(2019年7期)2019-11-25 01:43:04
模具制造(2019年3期)2019-06-06 02:10:54
中學(xué)生數(shù)理化·高一版(2018年1期)2018-02-10 05:20:03
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
七彩語文·寫字與書法(2016年7期)2016-07-28 21:40:22
七彩語文·寫字與書法(2016年6期)2016-07-15 19:36:34
人間(2015年21期)2015-03-11 15:23:21
現(xiàn)代企業(yè)(2015年9期)2015-02-28 18:56:50
