民用飛機TCAS與XPDR測試激勵器研究
2021-07-20 05:31:46郎夢夢
科技創新與應用 2021年19期
關鍵詞:飛機
郎夢夢
(上海飛機設計研究院,上海201210)
隨著民航事業的不斷發展,對大型民機的安全性能要求逐漸提高,交通監視功能的應用能夠有效減少飛機相撞的事故率,提高飛機的安全性[1-3]。交通監視功能包括TCAS(交通告警和防撞系統)和XPDR(S模式應答機)功能,通過探測臨近空域的入侵飛機的威脅,向本機的飛行員發出告警,并提示飛行員做出相應決策[4-5]。相對于國外較為成熟的研究,國內該方向的研究起步較晚,在測試權威性方面與國外也有一定差距。
本文對TCAS與XPDR仿真激勵器進行研究,可以減少早期測試成本,更加高效對飛機空中相撞的場景進行模擬測試[6]。為健全民機測試條件,對TCAS與XPDR測試激勵器的研究具有重要的現實意義。
1 仿真激勵器設計流程
仿真器軟件總體設計流程如圖1所示,以WINDOWS XP為軟件設計的編程環境,建立仿真激勵器的數據庫。為營造逼真交通場景,采用專業航空儀表繪圖軟件編寫交通監視人機交互頁面;通過啟動網絡測試線程檢測網絡連接狀態是否正常;依據真實場景進行場景設置以及故障注入;通過發送入侵飛機目標驗證激勵的告警信息,通過仿真模式詢問,顯示正確的應答信息。

圖1 設計流程圖
2 仿真激勵器組成
測試激勵器主要由仿真器主機和外部電纜組成。TCAS與XPDR仿真模塊、綜合處理I/O模塊、轉接單元、機柜單元、內部電纜五部分構成了仿真器主機。PXI控制器、PXI機箱、ARINC664板卡、ARINC429板卡、離散量板卡等構成了綜合處理I/O模塊。顯示器、一體化鍵盤鼠標、音響等構成了機柜附件。交通監視仿真激勵器組成如圖2所示。
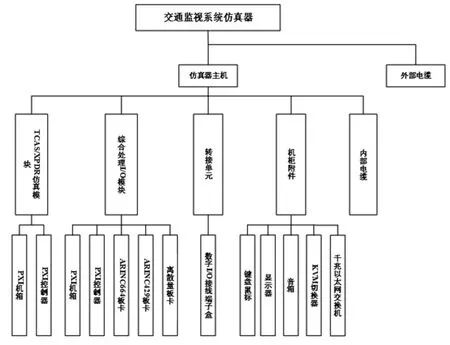
圖2 交通監視仿真激勵器組成
3 模擬目標軌跡原理計算
通過在人機交互界面完成模擬目標參數與本機飛機參數的初始設置,軟件會根據模擬目標飛機的初始高度(Alt)、初始高度速率(Alt_Rate)、初始高度加速度(Alt_Accel)、初始水平距離(Range)、初始水平速度(Air_Speed)、航跡角(Angle)等參數進行實時計算,從而得到模擬目標與本機之間高度、距離和方位角等信息。且設定本機參數和模擬目標的參數每t秒更新一次。模擬目標飛機示意圖如圖3所示。
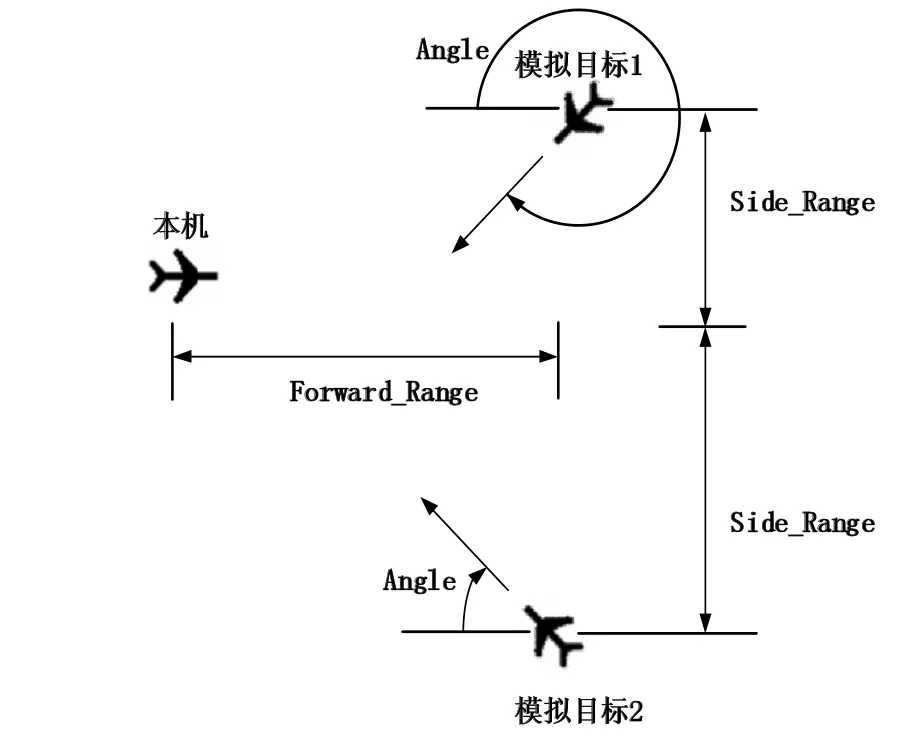
圖3 模擬目標飛機示意圖
模擬目標高度計算公式如下:

其中Alt表示高度,Alt_Rate表示高度速率,Alt_Accel表示高度加速度。
本機與目標飛機相對距離RR計算公式如下:
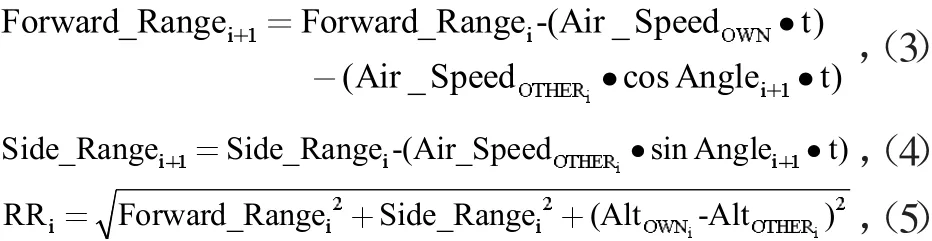
Forward Range是本機到目標飛機距離的x分量,Side_Range是從本機到目標飛機距離的y分量。Angle是從x坐標軸順時針測量的其他飛機的航向角。AltOWN表示本機的高度,AltOTHER表示目標飛機的高度。
在激勵器控制軟件主界面輸入本機參數以及模擬目標參數,仿真激勵器依據上述原理算法進行模擬目標軌跡計算,實現對目標飛機的監控。并依據DO-185B文件,按照威脅程度將目標飛機分為“其他(OTHER)”“臨近(PROX)”“交通咨詢(TA)”“決斷咨詢(RA)”四個等級,并將本機與模擬目標飛機在顯示界面進行顯示。
4 整機功能要求
測試激勵器設置按照ARINC735A、ARINC735B、ARINC718A的相關要求進行封裝,通過TCAS與XPDR系統中的Testport端口完成數字激勵;能夠仿真真實交通監視系統所有ARINC 429、ARINC 664等數字總線接口的輸出功能,能夠提供交通監視功能所有離散量、模擬量接口的輸出功能;能夠在實驗室環境下根據TCAS與XPDR系統激勵需求,完成場景設置(含入侵飛機高度、方向、軌跡等);具備應答A、C、S模式詢問的能力,且根據仿真詢問信號指令模擬出正確的參數,并在顯示界面顯示;能夠對TCAS和XPDR系統Testport端口的輸出數據進行狀態監控,且能夠對監控數據進行解析、顯示。
5 典型場景測試
仿真場景測試能夠模擬真實飛機的飛行驗證工作,在測試激勵器場景庫中,有設置場景庫和典型場景庫兩種。典型場景庫是為了方便用戶使用,在對TCAS/XPDR系統進行數字激勵時,可直接從典型場景中調用預置的場景來完成場景激勵。
以一個典型場景四為例進行測試,模擬空中單架無高度應答能力的入侵飛機從本機的正后方逐漸靠近的過程,且入侵飛機在運動過程中類型由其他飛機、臨近飛機、TA告警飛機變化,在變化過程中,依據TCAS邏輯產生相應的語音告警。本機參數設置見表1,入侵飛機參數設置見表2。典型場景四中入侵飛機與本機的顯示場景如圖4所示。

表1 本機參數設置表

表2 入侵飛機參數設置表

圖4 典型場景圖
6 結論
本文研究了一種民用飛機TCAS與XPDR測試激勵器,針對激勵器的設計流程、結構組成及功能進行了詳細介紹,并以一種典型場景進行測試驗證。該測試激勵器的研究可以使設計人員深入理解設計規范、性能標準、功能需求,促進后續國內民機TCAS和S模式應答機綜合集成驗證工作的開展。
猜你喜歡
青少年科技博覽(中學版)(2022年6期)2022-08-31 09:03:40
小哥白尼(軍事科學)(2022年3期)2022-06-09 03:11:24
環球時報(2022-05-30)2022-05-30 15:16:57
小哥白尼(趣味科學)(2020年12期)2021-01-18 06:15:26
民用飛機設計與研究(2020年4期)2020-11-27 17:34:02
青少年科技博覽(中學版)(2020年2期)2020-05-21 03:35:16
當代陜西(2019年11期)2019-06-24 03:40:28
百科探秘·航空航天(2017年11期)2017-12-20 07:31:34
百科探秘·航空航天(2017年12期)2017-08-15 00:55:45
作文周刊·小學一年級版(2017年9期)2017-06-20 00:19:33
