車載武器系統伺服控制研究
2021-07-20 05:33:04范留彬
科技創新與應用 2021年19期
關鍵詞:系統
范留彬
(中國空空導彈研究院,河南 洛陽471000)
伺服系統(Servo-System)指的是一類隨動類型的控制系統,是自動控制領域中的一類重要系統。此系統主要的功能是控制相關機構(被控對象)的轉動角度或相關位移量,讓被控對象可以自主并且精確地重復系統輸入相關指令所表達的運動變化規律。伺服系統的發展演變過程主要表現為從液壓系統升級到電氣系統的歷程。電氣類型的伺服系統按照相關驅動電機的種類可以劃分為直流(DC)類型的伺服系統及交流(AC)類型的伺服系統兩大類。伺服系統相關的自動控制科技屬于自動化學科類通用實際產業領域關聯性最強、延伸范圍最廣的一類學科。特別是在軍事領域中,對于相應的伺服系統提出了高速度、高靈敏度、高穩定性及高度的抗干擾性能以及較強的魯棒性等要求,比如雷達系統中天線裝置的自動跟蹤控制系統、遠程戰略性導彈發射裝置的瞄準過程動態控制以及魚雷裝備中的自動目標追蹤控制系統等等[1]。
1 國內及國際上的伺服控制系統的發展情況簡述
現代化的伺服控制系統,已經完成了從模擬時代到數字時代的跨越,數字化的控制環路已經取得了非常廣泛的應用,例如相位的轉換、電流數值、各個分量的速度及位置數值控制;使用新款的功率放大半導體單元、高性能DSP及FPGA、及伺服系統的專用單元。國際上知名廠商出品的伺服控制相關技術相隔6年左右就將進行一次更新換代,新款的功率放大元件或者模塊相隔3~4年就將升級一次,新版本的軟件及算法的更替則更為頻繁,總而言之,該領域的產品生命周期已經變得愈發短暫。綜合國內、國際各個伺服系統廠商的相關技術及產品的未來發展趨勢,不難看出在不久的將來,伺服控制系統的主流發展方向通常表現為:高效率特性、直驅模式、高控制精度、高速度、高執行性能、集成化與一體化趨勢、通用性能好、智慧化、信息化及模塊應用等[2]。現階段國外許多知名伺服系統控制領域的巨頭經過并購與結盟的操作,高速擴張其所在的業務領域,主要是想實現一站式、全方位解決方案供應商的霸主地位,例如從1997年來,已經有超過45家伺服系統控制公司被行業巨頭接連收購,其中包括大家比較熟悉的某些歷史比較悠久的品牌廠商。
2 伺服系統控制設備的整體框架方案設計簡介
2.1 重要功能參數指標
(1)依據相應需求,指定相關發射框架的轉動區間為:平面范圍土115°;上下仰角為(0~+55)°。
(2)發射框架的調動響應時間要求≤6.5s,調轉動作的最大位移速度為16°/s,加速度16°/s2。
(3)依據笛卡爾坐標系的相關精度需求,在5.5°角偏差量階躍類型的輸入信號狀態下,要求伺服系統的控制裝置穩態誤差數值處于<17°的狀態(包括傳動系統的誤差)。
(4)依照系統的動態精度需要,在運動系統的回轉速度數量不大于33mrad/s的情況下,伺服系統控制裝置的總體速度誤差數值處于<17°的狀態(包括傳動系統的誤差)。
(5)在滿負荷的情況之下,發射框架在平面范圍及上下仰角層面的回轉速率數值為(0.15~19)°/s狀態下可以實現回轉動作的平穩執行。
(6)在滿負荷的情況之下,系統的動態響應特征數值的相關需要,針對5.5°角度數值偏差信號的階躍輸入信號數值,如果實現穩態數值的97%,其總體調整時間為≤1.8s的區間,系統的總體超調量為≤15%的區間。
(7)伺服系統的控制裝置必須符合驅動裝置的滿載需求,其總體的轉動慣量為俯仰通路2650kg·m2,平面范圍通路2450kg·m2;負載的力矩數值滿足俯仰通路16550N·m,平面范圍通路2650N·m。
2.2 伺服系統控制相關裝置的總體設計方案簡述
針對車載武器系統相應的伺服控制系統,通常應用脈沖頻率寬度調制功率的放大裝置來驅動電機進行動力方面的活動。主要原因是:車載武器系統的驅動負載通常歸類到中小功率數值的范圍,車載武器系統的電源是蓄電池及車載發電機裝置,該電機的輸出力矩、轉動慣量比值大大超過傳統液壓類型的伺服系統機構,與此同時在噪音控制、環境污染、野外適應性等層面具有顯著的優勢。采用脈沖寬度調制(PMW)類型功率放大裝置,通常是因為脈沖寬度調制類型的功率放大裝置處在開、關情況,功率的損耗數值較低,執行效率較高,帶寬的線性相關程度較好,該情況比較適合于電池系統進行供電操作[3]。
相關伺服系統應用直流型電動機進行各類動作的操控,為了實現降低母線電流的目的,綜合功率放大裝置的相關性能,采用85V的電源提供電能,就必須更換電源,由電磁兼容的層面考慮,電源裝置需要進行隔離。位置變化的傳感裝置具有許多種類可供選擇,一般可以選用旋轉型變壓器、自動調整角度裝置、傳動軸角度編碼裝置等等,針對車載武器系統來講,振動和沖擊等外部環境比較惡劣,曾經使用較多的是旋轉型變壓器裝置;伴隨著光電傳動軸角度編碼裝置相關技術的持續發展、穩定性獲得了大幅度提升,可以全方位符合軍事領域車輛的使用需求,具備較高精度、較小體積以及數字化水平較高是該系統的顯著優勢[4]。
控制系統是電流數值環路、速度數值環路、位置數值環路3個環型的構造。電流數值環路的功能有:改善控制目標的傳遞函數形式,提升伺服系統響應的速度,及時控制系統力矩數值的擾動和電流數值的大幅度波動,設置系統的最大電流數值,保持系統具備足夠的加速階段轉矩數值,并最大限度地保證系統運行的安全性。速度數值環路的功能是加強系統總體的抵抗負載擾動的效果。位置數值環路的功能是確保系統的靜態精度數值及動態跟蹤數值,這些參數關系著該伺服系統的總體穩定性。
2.3 伺服系統的控制裝置構成簡述
伺服系統的控制裝置主要由伺服控制相關電路、通訊接口電路、伺服系統動力驅動電路、伺服系統電源供應電路、平面范圍電機速度測試機構、方位角度相關傳感裝置、仰角變換電機速度測試機構、俯仰程度傳感裝置等部件構成,如圖1所示。
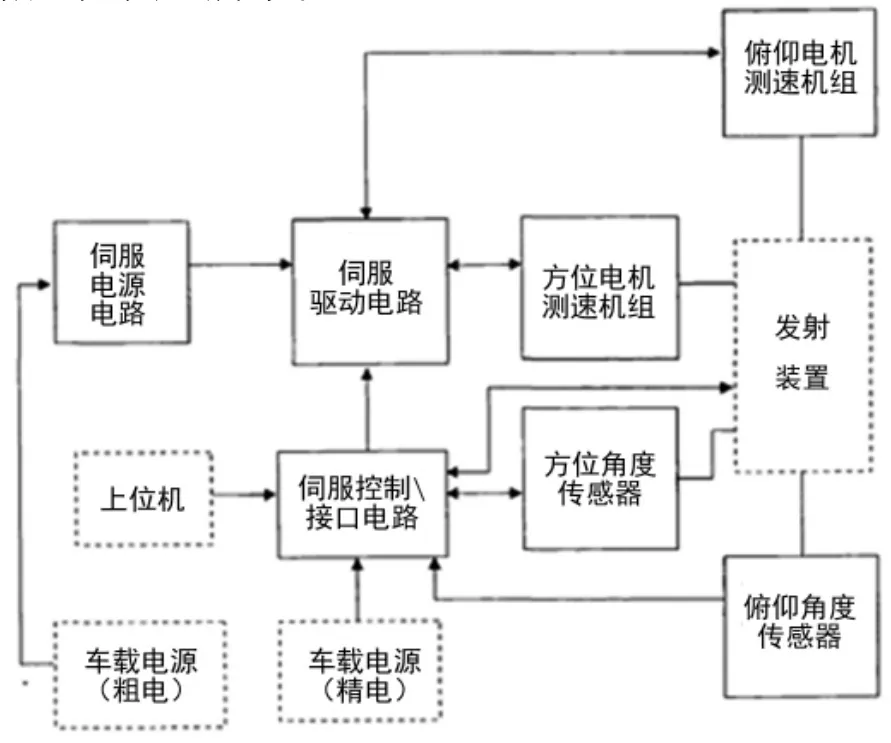
圖1 車載伺服控制裝結構組成原理圖
3 伺服系統控制裝置電路的設計
3.1 控制裝置硬件部分電路整體設計
相關系統的硬件電路主要分為4個組成部分:控制、接口、驅動以及電源轉化電路。控制部分以POWERCP為主,POWERCP是軍工領域嵌入式控制模塊的常用選項,選用該種方案作為控制單元可縮短設計周期、降低系統潛在隱患。驅動電路主要以APXE脈沖寬度調制放大裝置SA04為主,包含積分電路及轉速測量電路等等。接口電路包含過流保護檢測裝置、模式轉換單元等等。供電電路包含車輛26V輸入信號,經過DC-DC轉變成±18V及+7V。總體結構方案如圖2所示。

圖2 伺服控制系統總體框圖
3.2 系統驅動電路設計簡述
SA04是一類脈沖寬度調制類型的運算放大器裝置,可為負載供應4kW的功率。內部包含44kHz頻率的振蕩裝置,無需與外部進行通訊。電流傳感裝置能為所有的半橋電路系統供應幅值與方向方面的相關信號。斷開端可以斷開H橋電路系統的4個驅動管裝置。供電系統的電壓VS≤110V,供電系統的電壓VC值為(13~15)V,系統內部的功率損耗數值為330W,結溫數值是155°C,模擬信號的指令輸入數值為(2~8)V。電流環路使用PI模塊進行控制,用高精度、低能耗的運算放大裝置0P08作為電流調節器裝置(見圖3)采樣的脈沖寬度調制放大器裝置SA04的電流為感應端,通過差分電路進行放大操作之后,輸入到積分電路,形成了電流的閉環控制系統[5]。
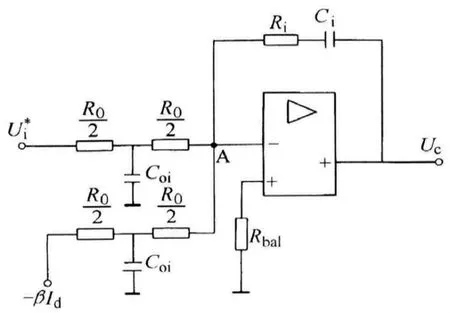
圖3 PI型電流、速度調節器裝置圖
3.3 電源轉化電路系統結構設計
電源轉化電路通常由穩壓電源單元、濾波系統電路、輸出電路及泄放系統電路構成。穩壓單元使用4并3串的模式,即4個28V/630W的電源并聯成一組電源,隨后并聯3組再串聯進行輸出的模式,該方案能夠達成電源的總輸出數值為82V/88A的目的。濾波系統電路屬于二級共模濾波模式。泄放系統電路由電子開關及功率電阻組成,開關通過功率電阻熱效應消耗掉后續電機負載的能量,如果輸出端電壓小于85.5V時開關閉合,泄放系統電路停止運行。如圖4所示。
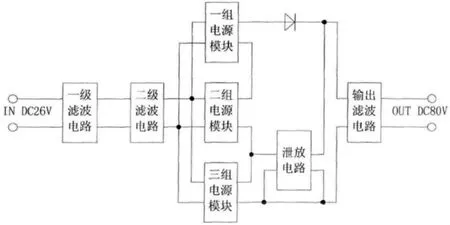
圖4 電源轉化電路工作原理圖
4 結論與展望
4.1 結論
本文針對車載武器裝置系統相應的伺服控制系統裝置設計了總體框架結構,對于伺服系統控制裝置的重要指標進行了詳盡介紹,綜合各項指標設計了控制方案相關模型,介紹了硬件電路軟件系統的設計思路。因此,整體的伺服控制裝置系統目前在部隊列裝的裝備中取得了一定程度的實際應用,滿足某型號車載反坦克導彈系統的核心技術參數,該系統的開發周期及研究經費獲得了顯著壓縮及降低。
4.2 研究展望
通過本文的研究可以得出,非線性及強耦合的被控制目標愈發普遍,在高性能控制的情況下,常規的控制模式有很大的實現難度。這就促使新的控制模式、智能系統及其軟硬件的持續升級,因此算法簡單、容易實現、平穩性及魯棒性優的伺服系統會獲得更多的研究成果。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
