基于改進蜂群算法的共享汽車停放區域多目標選址方法
2021-07-27 14:21:22周婷
黑龍江工業學院學報(綜合版) 2021年5期
周 婷
(三聯學院,安徽 合肥 230071)
隨著共享汽車產業的不斷發展,對車輛停放位置的需求不斷提升。其中,共享汽車停放的地址成為該產業持續發展的關鍵環節。因此,相關的停放區域選址研究受到人們的極大重視[1]。
對共享汽車停放區域多目標選址規劃設計是建立在對共享汽車停放區域的位置參數節點分析基礎上,采用空間參數尋優,進行規劃和動態節點控制,實現停放區域多目標選址和自動化規劃設計[2]。傳統方法中,選址方法主要有基于模糊動態參數識別的選址方法、基于粒子群尋優的選址方法、基于模糊PID的多目標選址方法等。本文構建選址規劃的動態特征分析模型,通過控制信息融合和多維參數識別,完成規劃設計[3-5]。但傳統方法選址的自適應性不好,聯合參數尋優能力不強。
針對上述問題,本文提出基于改進蜂群算法的共享汽車停放區域多目標選址方法。首先,構建共網格區域規劃模型,采用分塊網格區域模板匹配方法,實現選址過程中參數尋優;然后,建立共選址規劃模型,通過量化參數融合方法,構建節點定位模型,建立最優目標搜索函數,通過反饋調節方法,實現多目標選址和自適應定位;最后,進行仿真測試分析,展示了本文方法在提高選址和規劃能力方面的優越性能。
1 共享汽車停放區域參數規劃和融合
1.1 共享汽車停放區域參數規劃模型
為了實現基于改進蜂群算法的多目標選址,首先構建網格區域規劃模型,采用分塊網格區域模板匹配方法,實現選址過程中參數尋優[6],得到選址的總體結構如圖1所示。
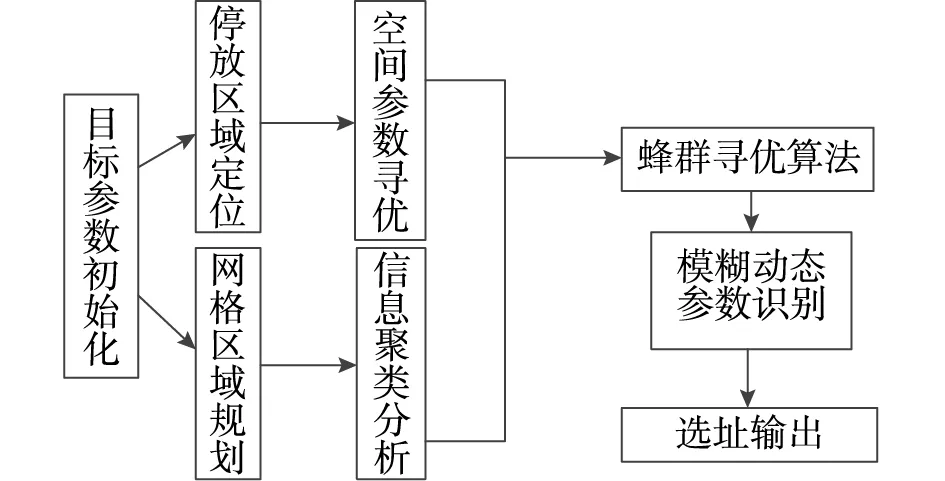
圖1 共享汽車停放區域選址的總體結構
構建選址的測度模型,通過測度分析方法,進行區域的網格分塊匹配[7],得到規劃的聯合特征概率值pi,定義如式(1)所示。
(1)
式中,giti代表停放區域節點i的適應值;mb代表最佳停放區域分布的網格分布系數。
采用聯合特征分析方法,建立選址的自適應參數規劃模型如式(2)所示。
(2)
式中,k∈{1,2,…,SN},j∈{1,2,…,D}是先驗知識可循調度集,且k≠i;共享汽車停放區域的自相關參數β是一個隨機跳變的數,表示共享汽車停放區域的搜索區域范圍,采用蜂群尋優控制,進行共享汽車停放區域的選址節點定位。
求得共享汽車停放區域的選址節點kij與xkj之間的差距縮小,意味共選址得到最優解。對選址位置kij采用隨機定位方法進行優化定位。根據上述分析,得到選址的參數識別模型,結合空間參數規劃,進行多目標參數融合[8]。
1.2 共享汽車停放區域多目標參數融合
采用分塊網格區域模板匹配方法,實現共享汽車停放區域選址過程中的參數尋優,得到共享汽車停放區域選址的在線參數得到模型如式(3)所示。
(3)
式中,h∈{1,2,…,D},表示共享汽車停放區域多目標尋優的最佳解范圍。
基于聯合參數識別和補償控制的方法,進行共享汽車停放區域多目標輸出狀態參數識別,得到空間區域融合參數定義如式(4)所示。
(4)
采用Rastrigin函數實現對共享汽車停放區域多目標定位的輸出穩定性控制,得到控制函數如式(5)所示。
根據自適應控制結果,結合人工蜂群算法,建立共享汽車停放區域多目標參數尋優的聯合動態特征量,表示如式(6)所示。
(6)
在負載均衡控制下,根據變異蜂群指導和遷移特征量轉換,得到共享汽車停放區域選址尋優的適應度函數如式(7)所示。
(7)
(8)
通過上述多目標參數融合結果,采用二乘規劃算法進行共享汽車停放區域選址的博弈尋優,構建共享汽車停放區域選址的自適應網絡拓撲結構,提高優化選址能力[9]。
2 共享汽車停放區域選址方法優化
2.1 共享汽車停放區域選址的蜂群尋優
采用分塊網格區域模板匹配方法,實現共享汽車停放區域選址過程中的參數尋優,建立選址規劃模型,通過量化參數融合方法,構建選址的節點定位模型,采用蜂群尋優算法[10],得到選址的聯合控制參數limit,蜜源因素參量式(9)所示。
(9)
式(9)用于偵察峰通過聯合尋優,進行目標控制,建立共享汽車停放區域選址的自適應尋優控制參數,采用二乘規劃算法進行空間規劃設計,得到蜂源尋優路徑如式(10)所示。
(10)
(11)
通過上述模型,得到共享汽車停放區域選址的自適應蜂群尋優函數如式(12)所示。
上式表示為共享汽車停放區域選址的約束指標參量集,為一個標準的正態分布函數,得到共享汽車停放區域選址的蜂群尋優規劃模型如圖2所示。
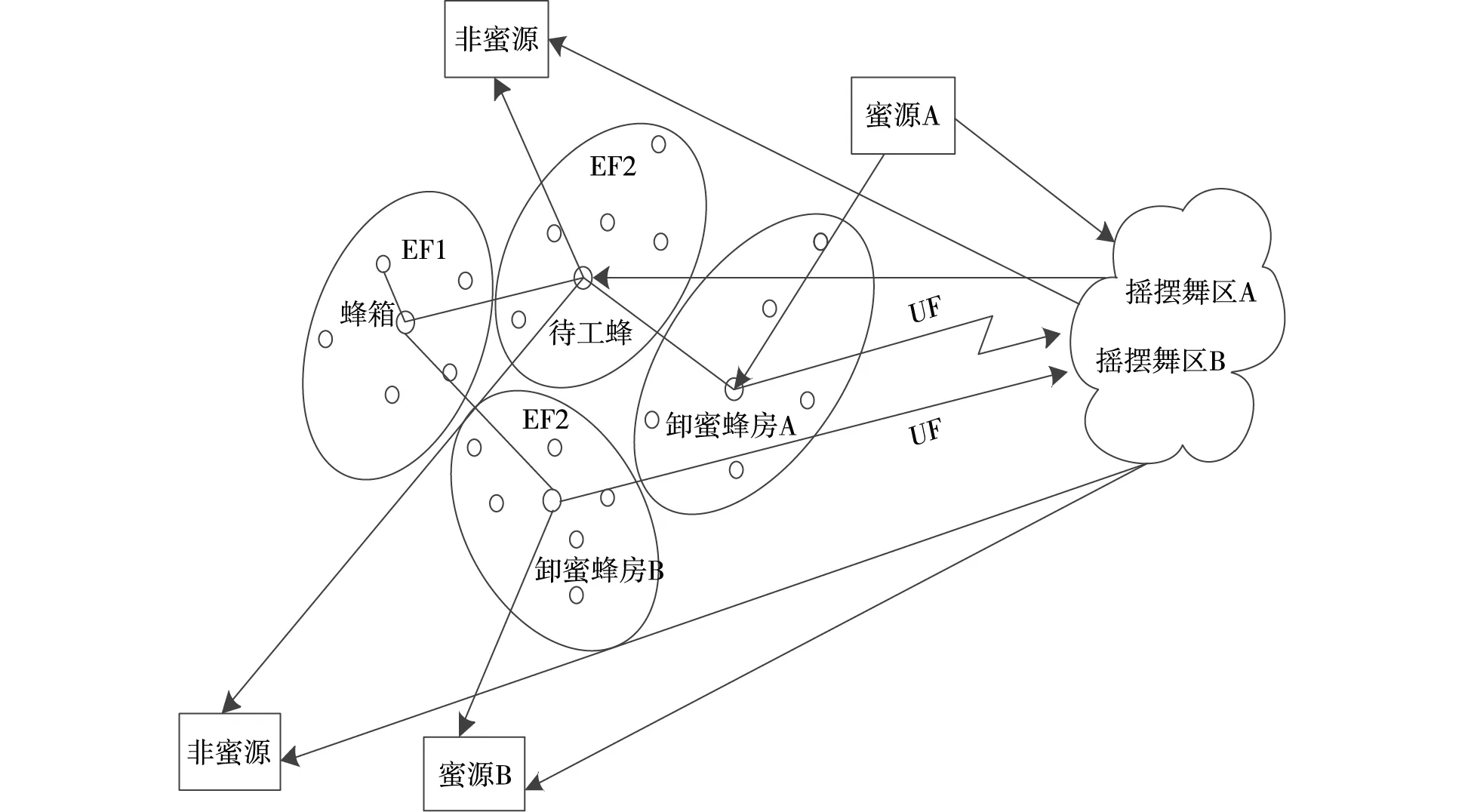
圖2 共享汽車停放區域選址的蜂群尋優規劃模型
2.2 共享汽車停放區域選址定位優化
采用嵌入式的模糊控制方法,建立低碳模式下共享汽車停放區域選址信息融合[11],采用定量分析法得到共享汽車停放區域選址評估的解釋參數分析模型,得到聯合適應度函數如式(13)所示。
(13)

(14)
fmin和fmax形成的共享汽車停放區域選址的最大和最小概率密度集,rand表示共享汽車停放區域選址的尋優函數服從隨機分布,根據上述分析,構建共享汽車停放區域選址的自適應控制模型,如式(15)所示。
(15)
根據共享汽車停放區域的蜜蜂參與度水平,得到聯合概率密度表達式如式(16)所示。
(16)
分析低碳排放下共享汽車停放區域選址的可靠性,當滿足EUR(q,w,e),得到低碳排放下共享汽車停放區域定位實現流程如下。
(1)計算碳排放下共享汽車停放區域的聯合特征檢測統計量A,每個解個體i的定位規則排序R′(i)如式(17)所示。
R′(i)==|{j|j∈A,ji}|?i∈A
(17)
(18)
人工蜂群算法解個體i的排序數R(i)等于解個體i的偽隨機排序結果。這與所支配個體i的所有解個體的偽排序數之和相同。
(3)根據人工蜂群種群分布,得到共享汽車停放區域選址評估的效益度水平,得到效益度特征分量如式(18)所示。
(19)
根據蜂群尋優的密度參數,進行多目標選址和參數控制。
(4)建立最優目標搜索函數,通過反饋調節方法,實現自適應定位,得到停放區域選址定位優化如式(20)所示。
(20)
式中,R(i)表示人工蜂群算法中共享汽車停放區域多目標尋優的控制函數,λ(i)表示相對解
個體i的密度值。根據上述分析,實現選址算法優化設計。實現流程如圖3所示。
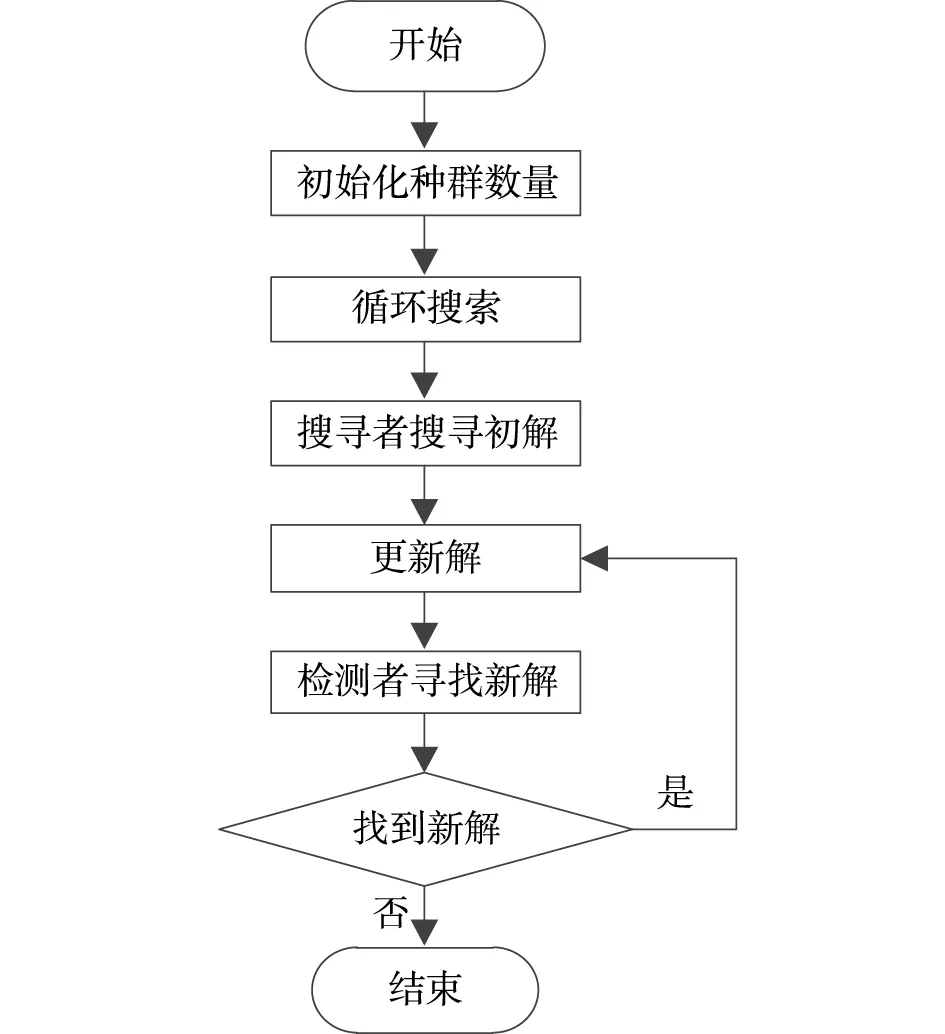
圖3 蜂群尋優實現流程
3 實驗測試
為了測試本文方法在實現共享汽車停放區域選址可靠性分析中的應用性能,進行仿真測試。實驗在MATLAB軟件上進行,實驗操作系統為WINDOWS XP系統,其運行內存為16GB,CPU為3.6GHz。選擇Sphere函數為測試函數,設定共享汽車停放區域多目標選的蜂群尋優的個體數為340,尋優進化系數為0.35,變異系數為0.14,共享汽車停放區域選址的參數尋優結果見表1。

表1 共享汽車停放區域選址的參數尋優結果
根據表1的測試樣本集,采用本文方法進行蜂群尋優控制,得到共享汽車停放區域多目標選址的空間規劃結果見表2。

表2 共享汽車停放區域多目標選址的空間規劃結果
根據上述參數解算結果,進行共享汽車停放區域多目標選址,得到初始位置分布如圖4所示。
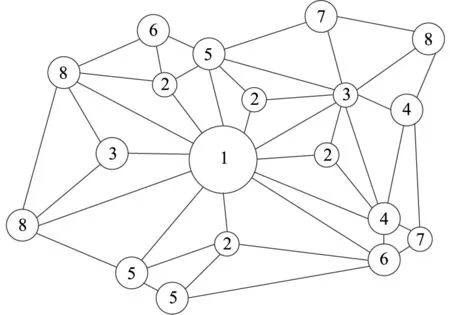
圖4 初始位置分布
根據圖4所示的選址位置分布,進行多目標選址尋優,得到目標選址的自適應性測試結果如圖5所示。
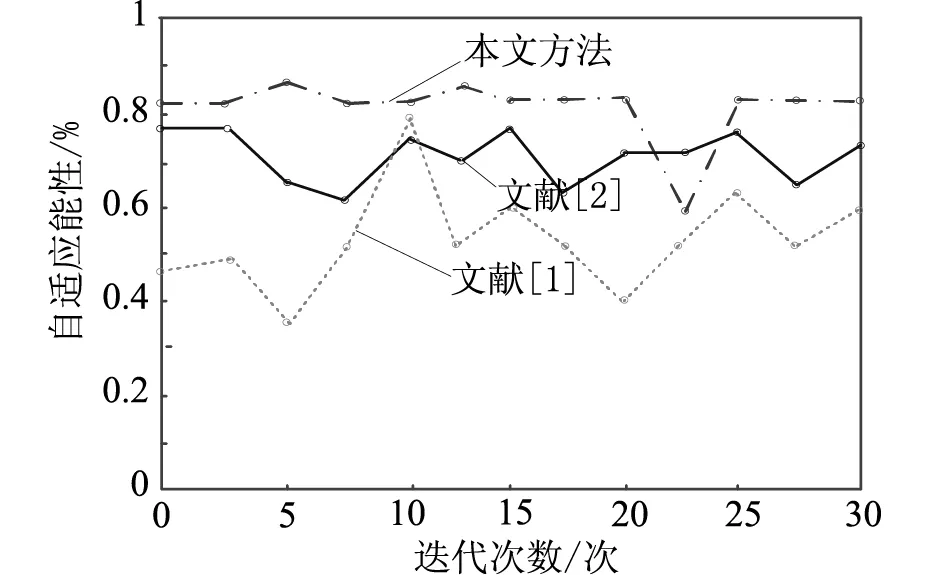
圖5 目標選址的自適應性測試結果
分析圖5得知,采用本文方法進行多目標選址,得到識別能力檢測結果如圖6所示。
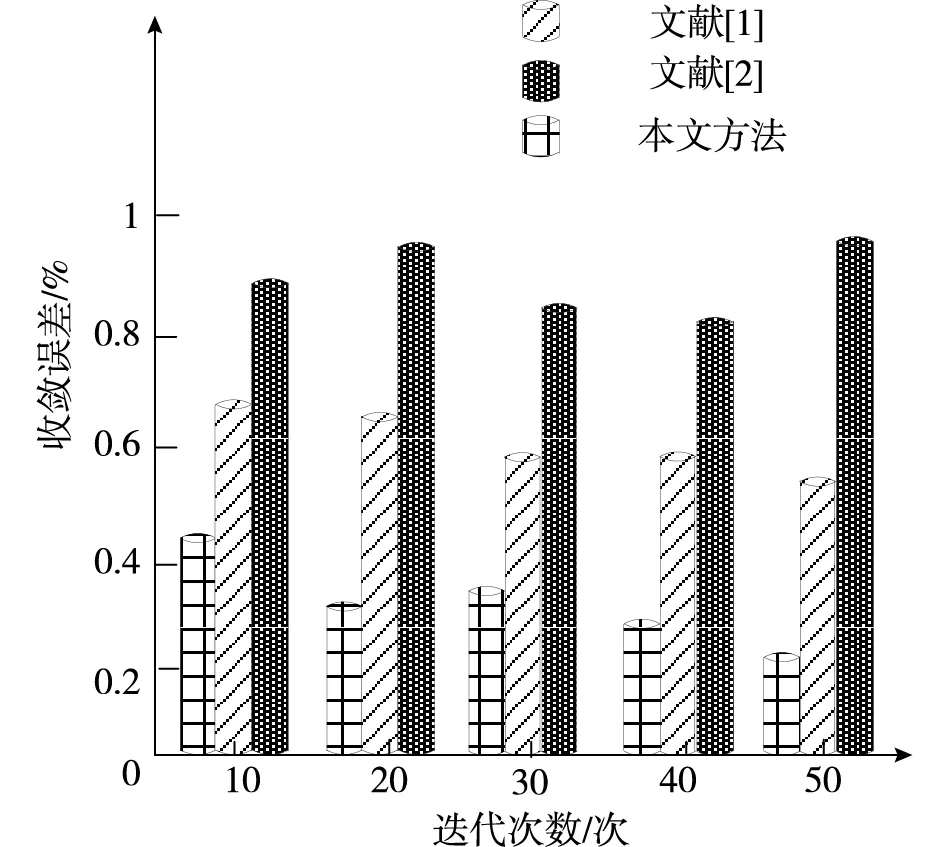
圖6 識別能力檢測結果
分析圖6得知,將文獻[1]、文獻[2]的傳統方法與該方法進行比較,可得本文方法進行選址的識別能力較好,自適應性較強。
4 結論
研究共享汽車停放區域規劃模型,結合目標選址的參數識別和優化規劃方法,實現對共享汽車停放區域動態參數分析,本文提出基于改進蜂群算法的共享汽車停放區域多目標選址方法。構建選址的網格區域規劃模型,結合空間參數規劃,進行選址識別。研究得知,本文方法進行選址的識別能力較好,自適應性較強,提高了選址規劃能力。
猜你喜歡
領導決策信息(2018年50期)2018-02-22 06:17:16
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
商周刊(2017年5期)2017-08-22 03:35:26
中國衛生(2016年2期)2016-11-12 13:22:16
中國科技博覽(2016年2期)2016-04-25 20:32:39
作文大王·低年級(2016年4期)2016-04-18 00:24:37
小學生導刊(2016年34期)2016-04-11 00:49:44
中國工程咨詢(2016年4期)2016-02-14 07:28:28
電測與儀表(2015年5期)2015-04-09 11:30:52
決策探索(2014年21期)2014-11-25 12:29:50