多球碰撞型耗能減震器力學性能分析
2021-08-02 10:20:06何芝仙
安徽工程大學學報 2021年3期
關鍵詞:振動
高 超,何芝仙
(安徽工程大學 力學重點實驗室,安徽 蕪湖 241000)
結構的減震控制技術通常是通過隔振耗能裝置來“疏導”地震發生時輸入的能量,使主體結構本身承受很少的能量,從而保護主體結構免遭破壞。碰撞型耗能減震器由于其構造簡單、制作容易、成本低等特點,被廣泛應用于結構抗震。目前應用于結構抗震的碰撞型耗能減震器,按減震球個數可分為單球型耗能減震器和多球型耗能減震器。單球型減震器作為線性動力吸振器,在窄頻帶內表現優異,具有良好的效果,典型如臺北101大樓的球形調質阻尼器,但減震球體積與重量大,制造安裝不便。多球型減震器呈現非線性特征,相較單球減震器而言,它擴展了頻帶寬度,但在一定程度上失去了有效性。如張俊杰等提出了使用砂箱作為阻尼減震器的研究方案,其性能主要受制于砂的顆粒級配,砂子的級配不好,結果就不理想,且減震性能只能通過實驗測試。M.Gharib等提出了一種線性粒子鏈沖擊阻尼器,通過激勵主系統使小球與大球多次碰撞耗散大量動能進而達到減震目的,但在特定的外力作用下會產生不利碰撞,進而對結構造成不利影響。S.Ekwaro-Osire等使用擺式沖擊實驗裝置對多球沖擊減震器吸收震動特性的研究以及I.Kernytskyy等提出的在矩形空間中安裝3個不同沖擊質量的DVA的設計方案也存在此類問題。F.Djemal等提出將存儲一些小球體的鋼外殼附接到初級振動結構的設計思路,由于小球堆疊擺放,隨著荷載的增加,“筒壁效應”就越顯著,削弱其減震效果。
考慮到帶寬和減震有效性,研究提出了一種由多個減震球組成的碰撞耗能減震器,其特點是用擋板將減震球一一隔開,實現多個單球耗能減震器的并聯。與現有單球耗能減震器相比,研究提出的減震器相當于是多個單球減震器的疊加,減震性能有效提升。并且由于碰撞間隙可調,其減震頻帶更廣,在工程中的實用性更高。與現有多球耗能減震器相比,研究提出的減震器進一步改進了其結構設計,避免了多球堆疊導致的性能下降,實現了一球一框的合理布置,同時也減少了實際施工成本。
1 多球碰撞耗能減震器原理
1.1 減震器工作原理
研究提出的間隙可調網格式多球碰撞型減震器工作原理如圖1所示。由圖1可知,減震器主要由底座、活動板、減震球和間隙調節機構組成。底座固定于減震對象上,其上安裝多個左擋板,多個右擋板則固定在活動板上,減震球放置在左右擋板構成的空間中。活動板可以通過間隙調節機構在移動副上左右移動(其中移動副安裝于底座上),以調整減震球的工作間隙,并適應不同振幅振動對象的減震要求。間隙調整機構由步進電機、螺旋傳動機構和連桿機構組成,步進電機的轉動通過螺旋機構和連桿機構驅動活動板左右移動,以調整減震球的工作間隙。連桿機構工作時桿和桿處于近似共線位置,這樣減震器作用在活動板上的碰撞力主要通過桿和桿傳遞到支座上,因而,與之垂直的步進電機上所受到的碰撞力很小或不受碰撞力作用,可以起到保護電機的作用。減震器的工作方向與活動板移動方向呈45°夾角,這樣通過活動板一維方向的調節運動就可以實現減震球兩個方向的間隙調整。
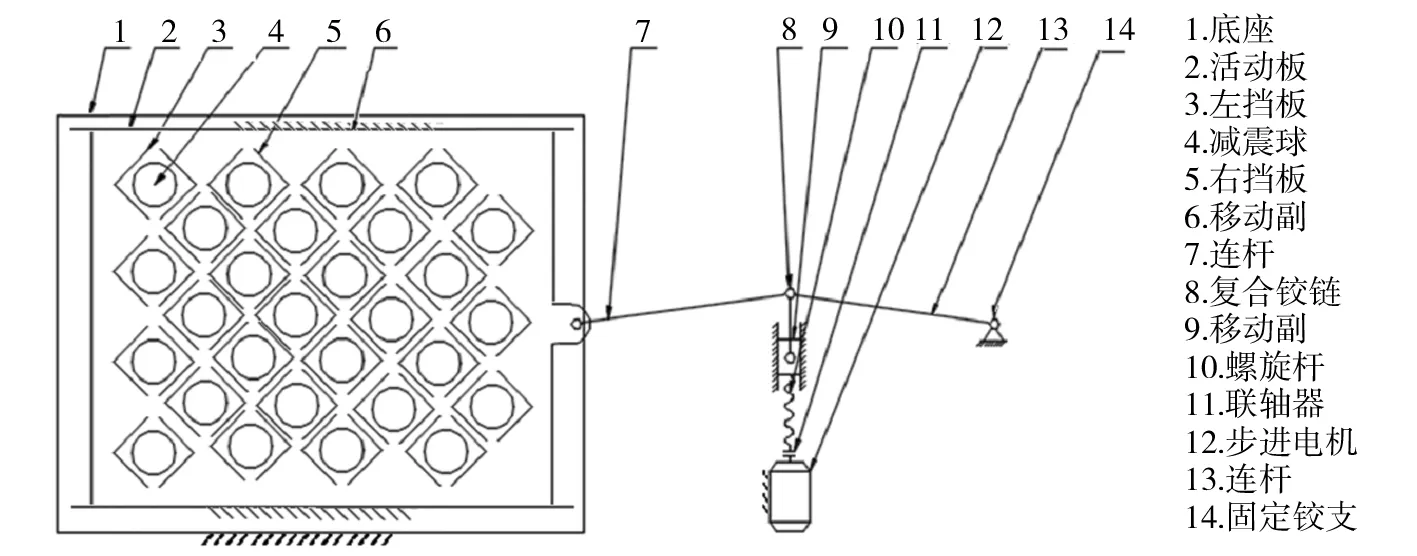
圖1 多球碰撞型耗能減震器
1.2 力學模型及正常工作條件
為了研究減震器的力學性能,提出計算簡圖如圖2所示。為了簡化問題,提出以下假設:①忽略減震球與底面的摩擦力;②忽略減震球的體積,將其視為質點;③減震球與左、右擋板之間的碰撞為完全非彈性碰撞,即恢復系數e
=0,碰撞時間極短,碰撞前后位置不變;④底座及建筑物質量遠大于減震器質量。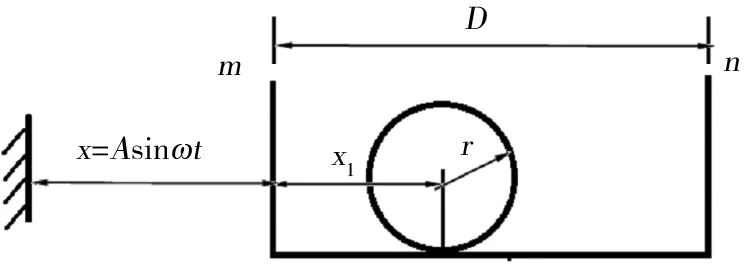
圖2 力學模型
設減震球半徑為r
;減震球與左右擋板之間的總間隙Δ
=D
-2r
,D
為左右擋板之間的距離;球心相對于左擋板的位置坐標為x
。當底座作簡諧振動時,底座的位置坐標x
=A
sinωt
,底座的速度v
=Aω
cosωt
。減震球的位置:
x
=x
+x
=A
sinωt
+x
,(1)
減震球的速度:

(2)
碰撞條件:
x
=r
或x
=D
-r
。(3)
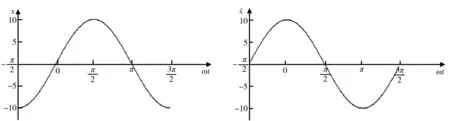
圖3 底座簡諧運動位移與速度變化規律
綜上所述,減震器正常工作條件為:
(4)
通過上述分析可知,由于研究討論的多球碰撞型減震器間隙可調,在正常工作條件下,減震器對減震對象的振動頻率和振幅具有很強的適應性。
2 減震性能分析
2.1 算法流程
為了定量分析減震器的力學性能,在減震器底座作簡諧運動的條件下采用數值方法對減震器的運動進行仿真分析,其算法流程圖如圖4所示。
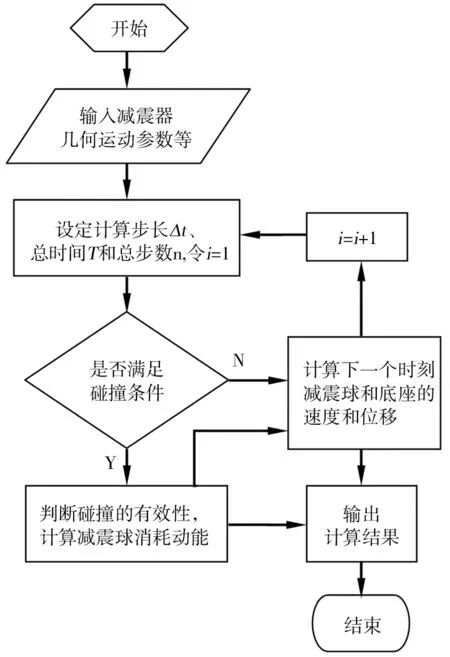
圖4 算法流程圖
(1)輸入減震器運動參數,如底座振動頻率ω
和振幅A
等,以及減震球初始運動條件,如減震器工作間隙Δ
,減震球的初位移和初速度,材料恢復系數等。(2)設定計算總時間T
和步長Δt
,從而計算出計算總次數n
。并令i
=1,開始循環計算求解。(3)計算底座和減震器的位移和速度,根據碰撞條件式(3)判斷減震器是否發生碰撞,若未發生碰撞,計算減震器和底座下一時刻的位置,并令i
=i
+1,進入下一步。若滿足碰撞條件,根據碰撞前底座和減震器的速度大小和方向,以及材料恢復系數,計算下一個時刻底座和減震器的速度,判斷碰撞的有效性。若碰撞前底座與減震球速度方向相反,則為有效碰撞,反之,為無效碰撞。計算減震球消耗的動能并令i
=i
+1,進入下一步。(4)結束循環,輸出計算結果。
2.2 計算結果與分析
y
=55sin(20πt
)+60cos(40πt
),也表現出同樣的碰撞特性。由此說明研究提出的多球碰撞型減震器對減震對象的不同運動特性也有良好的適應性。
圖5 底座簡諧運動時減震球運動規律
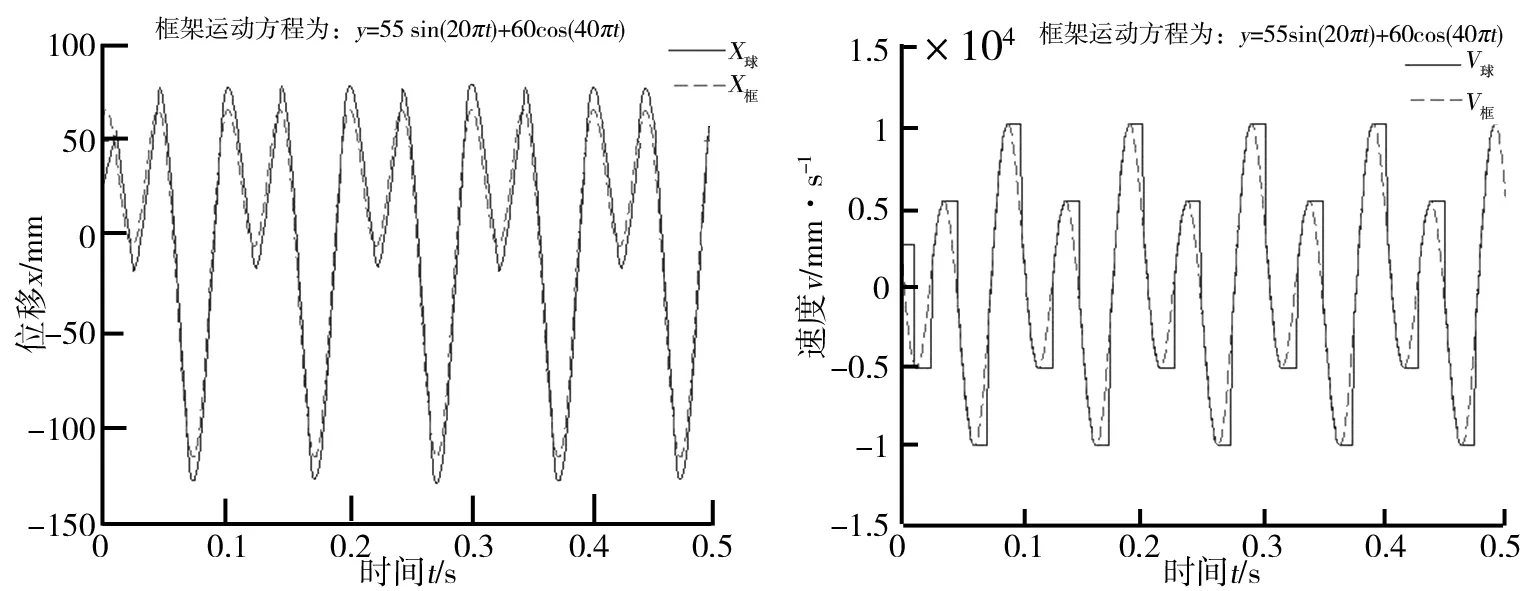
圖6 底座復雜運動時減震球運動規律
(2)底座振動振幅和頻率與減震球運動和耗能的關系。在底座簡諧運動頻率相同的條件下(f
=10 Hz),底座簡諧振動振幅A
與減震器每次碰撞消耗動能Q
之間關系曲線如圖7所示。由圖7可見,隨著底座運動振幅A
增加,減震器消耗的動能也隨之增多,這是由于底座運動振幅增加,最大運動速度上升,導致碰撞加劇,耗能增加。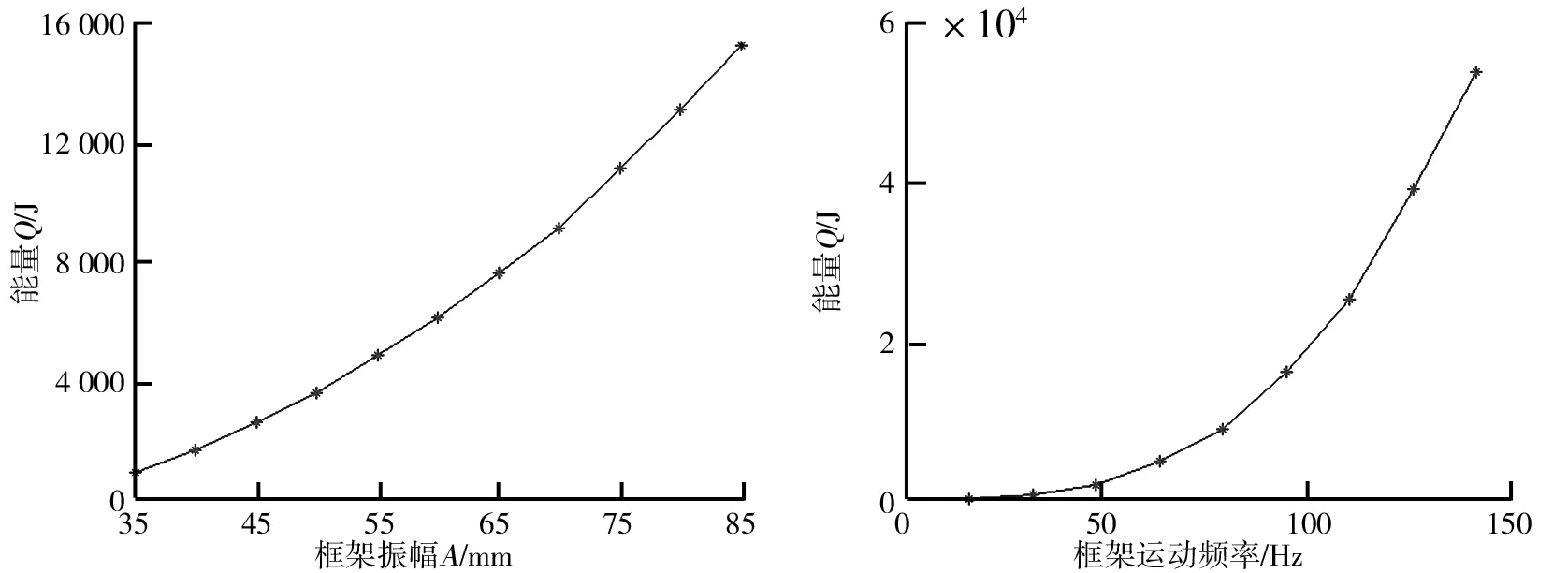
圖7 底座運動振幅A與減震器耗能關系 圖8 底座運動頻率ω與減震器耗能關系
底座簡諧運動振幅相同的條件下(A
=55mm),底座簡諧運動頻率ω
與減震器每次碰撞消耗動能Q
之間關系曲線如圖8所示。由圖8可見,隨著底座簡諧運動頻率ω
的增大,減震球每次碰撞消耗動能非線性增加。這是由于底座簡諧運動的最大速度與底座運動頻率ω
之間呈線性關系,底座運動頻率增加,底座運動的最大速度急劇上升,導致減震球每次碰撞耗能增加。同時也說明研究提出的減震器工作頻帶較寬。(3)初始條件對減震球運動規律的影響。減震球具有不同初位移x
時減震球的位移和速度變化規律如圖9所示。由圖9可見,在初位移x
正常取值范圍內,經過1~2次碰撞以后,減震球的位移和速度運動規律相同。同樣地,減震球初速度v
對減震球位移和速度響應的影響也有類似的規律如圖10所示。故減震球的初位移和初速度對減震器的力學性能影響不大。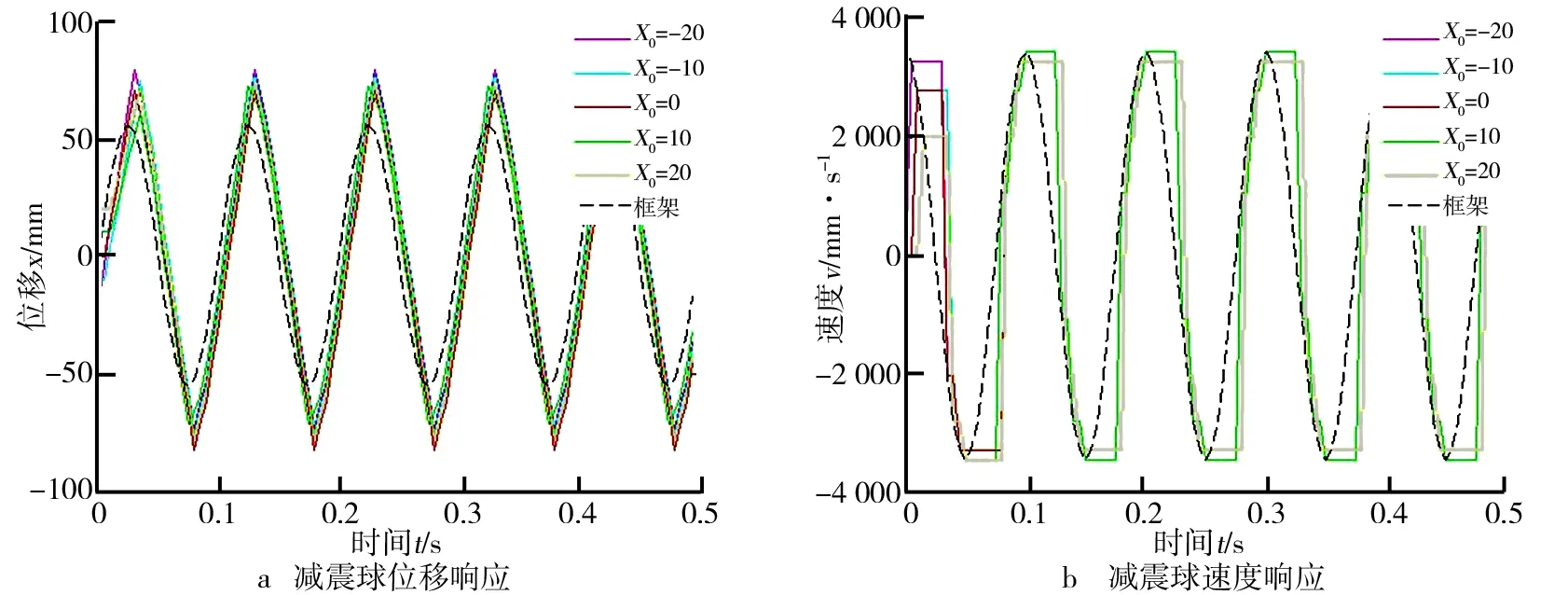
圖9 不同初位移x0時減震球的位移和速度響應
圖10 不同初位移x0時減震球的位移和速度響應
(4)恢復系數e
對減震球運動規律的影響。減震器具有不同恢復系數e
時減震球在0.5 s內的總耗能變化曲線如圖11所示。由圖11可見,減震球消耗能量與恢復系數e
之間的關系較為復雜,當恢復系數e
在[0,0.15]范圍內,減震球消耗的總能量和有效碰撞耗能隨著e
的增大而略有減小,無效耗能為0(有效耗能是指減震球碰撞能使得框架速度減少的碰撞耗能,反之則稱為無效耗能)。當恢復系數在[0.15,1]范圍內,減震球總耗能、有效耗能和無效耗能都隨著恢復系數的增加而增加。這是由于隨著恢復系數增加,減震球碰撞時反彈速度增加,有效碰撞次數和無效碰撞次數均增加,相應的耗能也增加。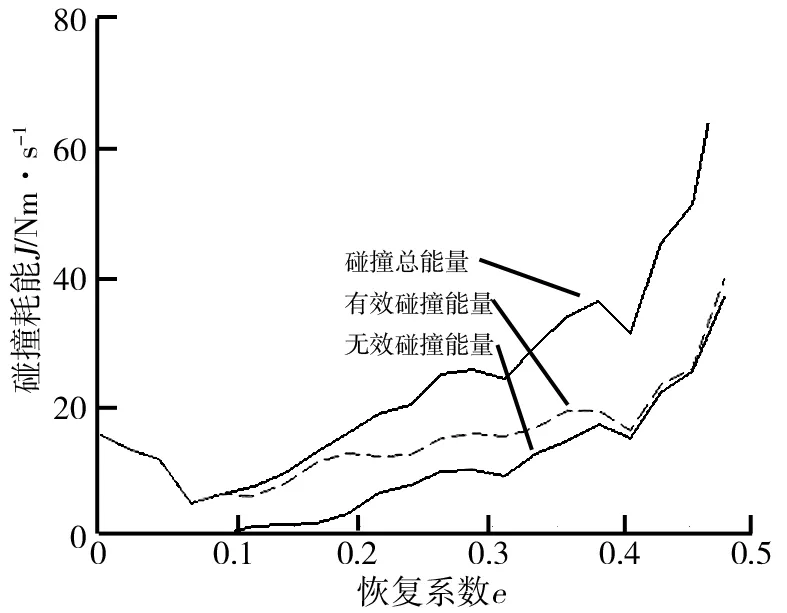
圖11 不同恢復系數e時減震球在0.5 s內的總耗能
3 結論
研究提出了一種間隙可調節式多球碰撞型耗能減震器,該減震器對減震對象振動頻率和振幅動態適用性強,且其運動特性分析計算方便易行。減震球初始位置和初始速度對減震球后續碰撞運動無影響,即多個減震球可同步工作。材料恢復系數e
對減震器性能影響很大,恢復系數e
越大,減震耗能效果越好。研究提出的多球碰撞型耗能減震器,性能預測方便,減震效果好,對減震對象的運動特征適應性強,具有較好的應用推廣前景。猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
大電機技術(2022年5期)2022-11-17 08:12:48
天天愛科學(2020年6期)2020-09-10 07:22:44
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
數學物理學報(2018年4期)2018-09-14 03:40:58
數學物理學報(2017年6期)2018-01-22 02:26:40
船海工程(2015年4期)2016-01-05 15:53:26
噪聲與振動控制(2015年4期)2015-01-01 07:08:44
計算物理(2014年2期)2014-03-11 17:01:44
鄭州大學學報(理學版)(2014年3期)2014-03-01 04:21:00
