基于Retinex理論的稀疏直接法VSLAM三維重建
2021-08-05 02:33:10夏琳琳劉瑞敏
中國慣性技術(shù)學(xué)報(bào) 2021年2期
夏琳琳,蒙 躍,王 策,劉瑞敏
(東北電力大學(xué) 自動化工程學(xué)院,吉林 132012)
近年來,基于視覺的同時(shí)定位與建圖(Visual Simultaneous Localization and Mapping, VSLAM)促進(jìn)了實(shí)時(shí)三維重建技術(shù)的發(fā)展。在單目重建領(lǐng)域,VSLAM 利用視覺傳感器獲取圖像信息,可快速計(jì)算機(jī)器人相對運(yùn)動位姿,使在線重建成為可能。與離線運(yùn)動恢復(fù)結(jié)構(gòu)(Structure From Motion, SFM)[1]思想相比,更具應(yīng)用前景[2]。
對于基于VSLAM 的實(shí)時(shí)三維重建而言,提高圖像的輸入質(zhì)量并處理是進(jìn)行有效三維重建的前提[3],然而,室內(nèi)場景普遍存在低光照、光照不均等問題,所獲取的圖像對比度低,極大地增加了VSLAM 前端特征點(diǎn)提取與匹配的難度。2016 年開源的單目稀疏直接法里程計(jì)(Direct Sparse Odometry, DSO)采用最小化光度誤差來尋求圖像中點(diǎn)與點(diǎn)的對應(yīng)關(guān)系,在以連續(xù)幀取得同一物體成像的過程中,考慮對相機(jī)進(jìn)行光度標(biāo)定[4]。然而,突出的環(huán)境光強(qiáng)變化問題會影響到DSO 視覺子系統(tǒng)的工作。基于此,本文提出由基于入射-反射模型的Retinex 理論[5],構(gòu)建一個(gè)自適應(yīng)的圖像增強(qiáng)模型,針對室內(nèi)光線不均、不平衡問題,對圖像不同區(qū)域進(jìn)行OSTU 動態(tài)閾值分割判別,以圖像預(yù)處理思想替代DSO 的光度標(biāo)定。
為了消除位姿漂移累積誤差的問題,本文旨在開發(fā)一類基于稀疏直接法單尺度Retinex 的SLAM 系統(tǒng)(Retinex DSO with loop closure detection, RDSOL)。設(shè)計(jì)上繼承了DSO 的主體框架。
主旨設(shè)計(jì)包括:一、對圖像進(jìn)行光度矯正以解決光照不均帶來的影響,提高SLAM算法魯棒性的同時(shí),避免傳統(tǒng)DSO 光度標(biāo)定的時(shí)間消耗,提升三維重建的速度。二、提出一種閉環(huán)檢測策略,利用該策略對關(guān)鍵幀的圖像特征點(diǎn)進(jìn)行提取并構(gòu)建詞袋(Bag-of-Words,BoW),通過詞袋判斷兩幀之間的相似度,實(shí)現(xiàn)閉環(huán)檢測。三、進(jìn)行全局位姿圖優(yōu)化,減少機(jī)器人運(yùn)動過程幀間遞推的累積誤差,最終構(gòu)建出全局一致的三維稠密點(diǎn)云地圖。
1 RDSOL 系統(tǒng)框架
所設(shè)計(jì)的RDSOL 系統(tǒng)框架如圖1 所示,整個(gè)系統(tǒng)可劃分為3 個(gè)模塊。在圖像預(yù)處理模塊,相機(jī)獲取新圖像時(shí),首先對圖像進(jìn)行OTSU 二值化處理并統(tǒng)計(jì)其灰度值,以判斷當(dāng)前場景的光照是否均勻、是否需進(jìn)行單尺度Retinex(Single Scale Retinex, SSR)圖像增強(qiáng)。
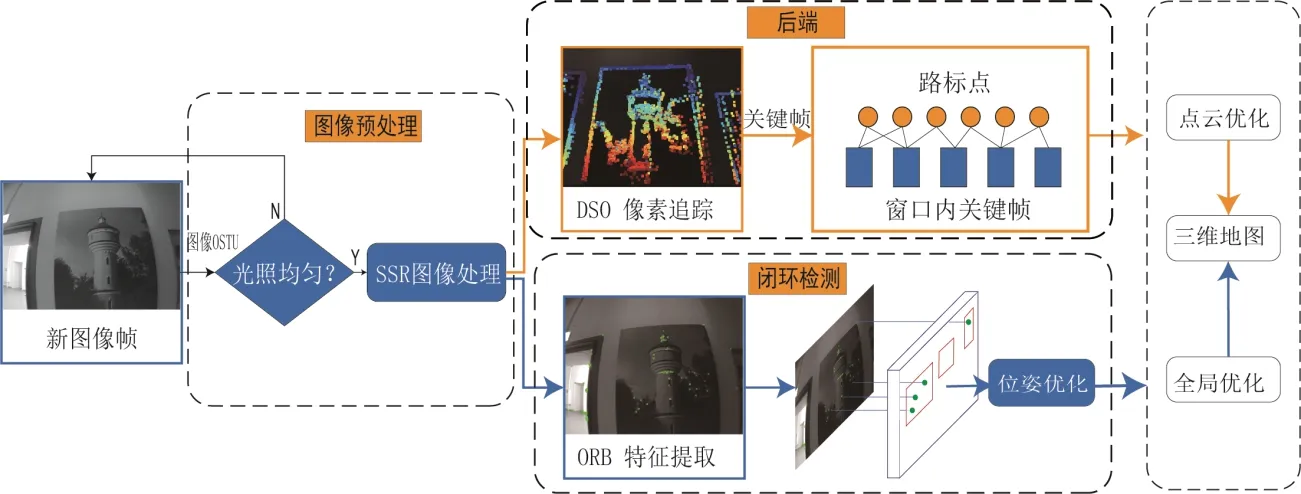
圖1 RDSOL 系統(tǒng)框架 Fig.1 RDSOL framework
后端模塊繼承了DSO 的典型功能,即使用一個(gè)由若干系統(tǒng)關(guān)鍵幀組成的滑動窗口(Sliding Window)[6]組成優(yōu)化后端,采用邊緣化策略,對關(guān)鍵幀中的路標(biāo)點(diǎn)和相機(jī)進(jìn)行聯(lián)合優(yōu)化,并將優(yōu)化過程限制在有限的關(guān)鍵幀窗口中。
閉環(huán)檢測關(guān)系到估計(jì)的軌跡和地圖在長時(shí)間下的正確性[7]。在閉環(huán)檢測模塊,本文提出一種將ORB 特征與原始點(diǎn)選擇策略結(jié)合的匹配方法,并通過TUM數(shù)據(jù)集、KITTI 數(shù)據(jù)集及實(shí)際場景測試,驗(yàn)證閉環(huán)軌跡效果。以下詳盡探討各模塊中算法的設(shè)計(jì)與實(shí)現(xiàn)。
2 算法設(shè)計(jì)與實(shí)現(xiàn)
2.1 位姿估計(jì)
室內(nèi)場景存在明暗變化,在確保不形成局部圖像梯度的條件下,RDSOL 采集圖像特征點(diǎn)位置及像素灰度信息,利用直接法最小化特征塊重投影光度誤差來優(yōu)化相機(jī)的位姿,其計(jì)算過程如下:
設(shè)Ii、Ij為相鄰兩幀圖像,若將第i幀中點(diǎn)p投影到第j幀,則其最小化光度誤差函數(shù)Epj為:


式中,R、t分別為相機(jī)的旋轉(zhuǎn)矩陣和平移向量,由兩幀之間計(jì)算可得;∏c、分別表示重投影、逆重投影變換。
2.2 單尺度Retinex 圖像增強(qiáng)
室內(nèi)場景需布置光源來確保光照。相機(jī)在圖像采集過程中,因環(huán)境光照不佳或物體表面采光不均等原因,常呈現(xiàn)圖像光照不均問題。直接法位姿估計(jì)以像素灰度值為參考,為確保灰度值準(zhǔn)確性,DSO 采用光度標(biāo)定來矯正光照不均[8]。然而,光度標(biāo)定需固定場景,使相機(jī)在不同曝光時(shí)間下,重復(fù)拍照獲得一系列圖像,此過程耗時(shí)巨大,且僅在當(dāng)前環(huán)境有效。即使基于精細(xì)的相機(jī)成像模型,若環(huán)境不同,或環(huán)境相同場景不同,都難以準(zhǔn)確標(biāo)定成像過程中的光度參數(shù),實(shí)現(xiàn)圖像亮度值的校正。
由于 DSO 的光度標(biāo)定實(shí)現(xiàn)條件苛刻,為使RDSOL 具有普遍適用性,本文采用分類判斷且有針對性的單尺度Retinex 圖像增強(qiáng)策略(因所獲圖像所有區(qū)域的光照并非都不均勻)用于圖像預(yù)處理階段。
圖像的分類判斷與處理基于全局二值化算法OTSU[9],即統(tǒng)計(jì)整個(gè)圖像的直方圖特性以自動選取二值化閾值。具體地,對圖像灰度級0~255 進(jìn)行遍歷搜索,若灰度值為某個(gè)值的時(shí)候,前景和背景的方差最大(類間方差最大),則當(dāng)前圖像灰度值便是所求閾值T。利用該閾值T對子圖像進(jìn)行分類:當(dāng)T>圖像灰度時(shí),判定某區(qū)域圖像光照均勻;當(dāng)T<圖像灰度時(shí),判定某區(qū)域圖像光照不均,需進(jìn)行Retinex 圖像增強(qiáng)。
Retinex 是一種以色感一致性為基礎(chǔ)的圖像增強(qiáng)方法,其目的是在獲取輸入圖像原始信息 I( x,y) 后,計(jì)算出光源照射的入射分量L( x,y),通過對L( x,y)的濾除來減少光照不平衡的影響,獲得被測物體原本的反射分量 R(x,y)。具體原理為:

式中,(x,y)為輸入圖像的每個(gè)點(diǎn)。
本文采用單尺度Retinex 算法求解R(x,y),即[10]:

式中,i表示第i個(gè)顏色通道,分為紅色、綠色和藍(lán)色三通道,分別代表物體對長波、中波和短波光線的反射能力;*表示卷積運(yùn)算;F(x,y)為高斯平滑函數(shù),其表達(dá)式為:

式中,K為歸一化常數(shù),滿足∫∫F(x,y)dxdy=1;C是函數(shù)所選的尺度參數(shù)。
Retinex 算法通過形態(tài)學(xué)閉合的方式,彌補(bǔ)了圖像細(xì)節(jié)的損失,使得高質(zhì)量的圖像輸出更利于后續(xù)SLAM 光流跟蹤及圖像特征提取。為便于說明,在此做了一組光照對比實(shí)驗(yàn),如圖2 所示。

圖2 室內(nèi)圖像增強(qiáng)效果Fig.2 Indoor image enhancement results
圖2(a)為某實(shí)驗(yàn)室的真實(shí)場景,由于光照不均勻,場景上存在明顯的背光現(xiàn)象。隨著相機(jī)的運(yùn)動,由于無法將新的特征點(diǎn)加入到構(gòu)建的地圖中,地圖無法隨相機(jī)視角的前移而進(jìn)行拓展,SLAM 系統(tǒng)無法繼續(xù)運(yùn)行。對圖2(a)紅色框選中的過亮(灰度值較高)部分進(jìn)行還原,獲得單尺度Retinex 處理后的圖2(c),并分別繪制兩圖像的灰度分布直方圖,如圖2(b)、圖2(d)所示。可以看出,圖2(c)的亮度更為均衡,圖2(d)的像素個(gè)數(shù)隨亮度的分布呈現(xiàn)更為均勻,表明Retinex算法有效提高了低光照條件下室內(nèi)圖像的顏色細(xì)節(jié)、保真度、對比度和清晰度,使得增強(qiáng)后的圖像視覺效果和梯度變換明顯改善,更利于SLAM 后端的像素追蹤與閉環(huán)檢測特征點(diǎn)提取。
2.3 閉環(huán)檢測
本文將ORB-SLAM 中基于圖像特征描述子的閉環(huán)檢測策略與DSO 結(jié)合,提出一種將ORB 特征與原始點(diǎn)選擇策略結(jié)合的匹配方法,其核心思想是將原始圖像進(jìn)行向下采樣得到不同分辨率的圖像金字塔,然后對不同層的圖像金字塔并行進(jìn)行ORB 特征提取與DSO 梯度點(diǎn)提取,該方法在高效提取圖像梯度的同時(shí),確保了所提取的特征匹配描述子的尺度不變性,提高了特征匹配的精度。當(dāng)確定了相應(yīng)的閉合環(huán)路特征描述子之后,計(jì)算歷史幀與閉環(huán)候選幀之間的位姿變換。將位姿轉(zhuǎn)換到相似變換群Sim(3)上,并利用相似變換位姿圖進(jìn)行全局優(yōu)化,進(jìn)而分散累積誤差,消除其對系統(tǒng)的影響。RDSOL 閉環(huán)檢測框架如圖3 所示。
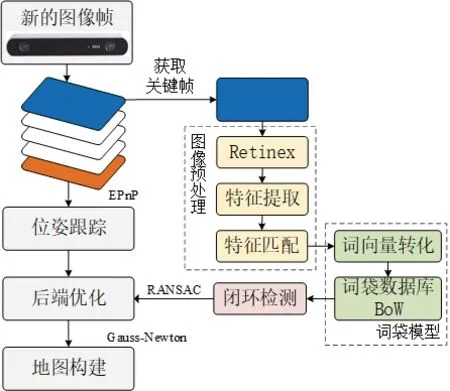
圖3 閉環(huán)檢測框架Fig.3 Designed loop closure detection framework
在閉環(huán)檢測模塊中,對每一個(gè)新的圖像幀進(jìn)行預(yù)處理,篩選出關(guān)鍵幀和普通幀,結(jié)合前文所提到的直接法由關(guān)鍵幀估計(jì)相機(jī)位姿。同時(shí),利用算法為每個(gè)關(guān)鍵幀計(jì)算ORB 描述符并將其轉(zhuǎn)化為詞向量,使用開源詞袋模型DBoW3 構(gòu)建詞袋數(shù)據(jù)庫BoW,通過查詢BoW 為當(dāng)前關(guān)鍵幀選取閉環(huán)匹配子(從被邊緣化的關(guān)鍵幀中選取)。對于每個(gè)匹配子,在獲得精確3D信息之后,將當(dāng)前幀與窗口中所有關(guān)鍵幀進(jìn)行匹配,最終得到地圖中3D 點(diǎn)和當(dāng)前幀中2D點(diǎn)之間的匹配關(guān)系。本文利用EPnP 計(jì)算相機(jī)位姿,并采用隨機(jī)采樣一致性(RANSAC)算法[11]剔除離群點(diǎn)。在計(jì)算出初始 SE(3)變化后,建立閉環(huán)誤差模型,使用Gauss-Newton 法對其迭代優(yōu)化,并將校正后Sim(3)上的位姿轉(zhuǎn)換至特殊歐式群SE(3)。所定義的閉環(huán)誤差項(xiàng)為:

式中,p'uv為當(dāng)前幀中匹配點(diǎn)坐標(biāo),d-1為其逆深度值;puv為閉環(huán)候選幀中匹配點(diǎn)坐標(biāo);c∏為當(dāng)前幀的重投影變換,為閉環(huán)候選幀的逆重投影變換;Scr為兩幀之間的相似變換。
3 實(shí)驗(yàn)結(jié)果與分析
本節(jié)設(shè)計(jì)了多組實(shí)驗(yàn),展示RDSOL 系統(tǒng)的閉環(huán)檢測精度、光度增強(qiáng)的速度優(yōu)勢及低紋理環(huán)境下Retinex 光度增強(qiáng)對特征提取的積極效果。數(shù)據(jù)集及實(shí)際場景實(shí)驗(yàn)均在PC機(jī)上采用Ubuntu16.04的環(huán)境運(yùn)行,平臺參數(shù)如表1 所示。

表1 運(yùn)行平臺Tab.1 Operating platform
3.1 TUM 數(shù)據(jù)集實(shí)驗(yàn)
開源單目數(shù)據(jù)集TUM-mono 包含50 個(gè)光度校準(zhǔn)序列,提供光度標(biāo)定圖和相機(jī)在閉環(huán)位置處的一段軌跡(無完整的實(shí)際地面軌跡),非常適合通過對累積漂移的估算,比較不同VSLAM 系統(tǒng)的準(zhǔn)確性及魯棒性。
選取TUM-mono 中50 個(gè)序列的軌跡對齊誤差ealign表征 VSLAM 系統(tǒng)的累積漂移,分別考察ORB-SLAM 關(guān)/開閉環(huán)檢測線程及DSO/RDSOL 的ealign取值(每1 個(gè)序列運(yùn)行十次),結(jié)果如圖4、圖5所示。
圖4 中X 軸為數(shù)據(jù)集序列號,圖中每一個(gè)色塊代表VO/SLAM 對齊軌跡間的絕對軌跡誤差A(yù)TE(作為ealign指標(biāo)),VO代表ORB-SLAM關(guān)閉閉環(huán)檢測線程。可以看出,VO 在整體序列上的 ATE 要比下部ORB-SLAM 大的多,表明添加閉環(huán)檢測線程的VSLAM 能夠提供更高精度的定位支持。
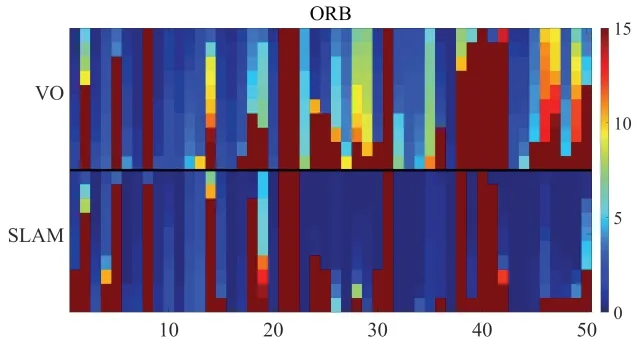
圖4 ORB-SLAM 有/無回環(huán)下對齊誤差對比Fig.4 ORB-SLAM alignment error comparison with/without loop
圖5 給出了相同序列上DSO 及RDSOL 的測試結(jié)果對比,進(jìn)一步驗(yàn)證了添加閉環(huán)后的RDSOL 可有效消除VSLAM 累積誤差,有助于更好的跟蹤及地圖創(chuàng)建效果。
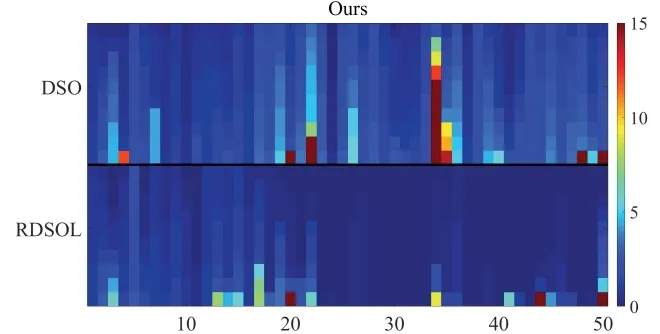
圖5 DSO 與RDSOL 對齊誤差對比Fig.5 Alignment error comparison between DSO and RDSOL
選取TUM-mono數(shù)據(jù)集的Sequence20序列,分別測試DSO/RDSOL(無/有閉環(huán)檢測線程)對實(shí)際室內(nèi)場景中機(jī)器人位姿估計(jì)的影響,三維重建效果分別如圖6(a)、圖6(b)所示。
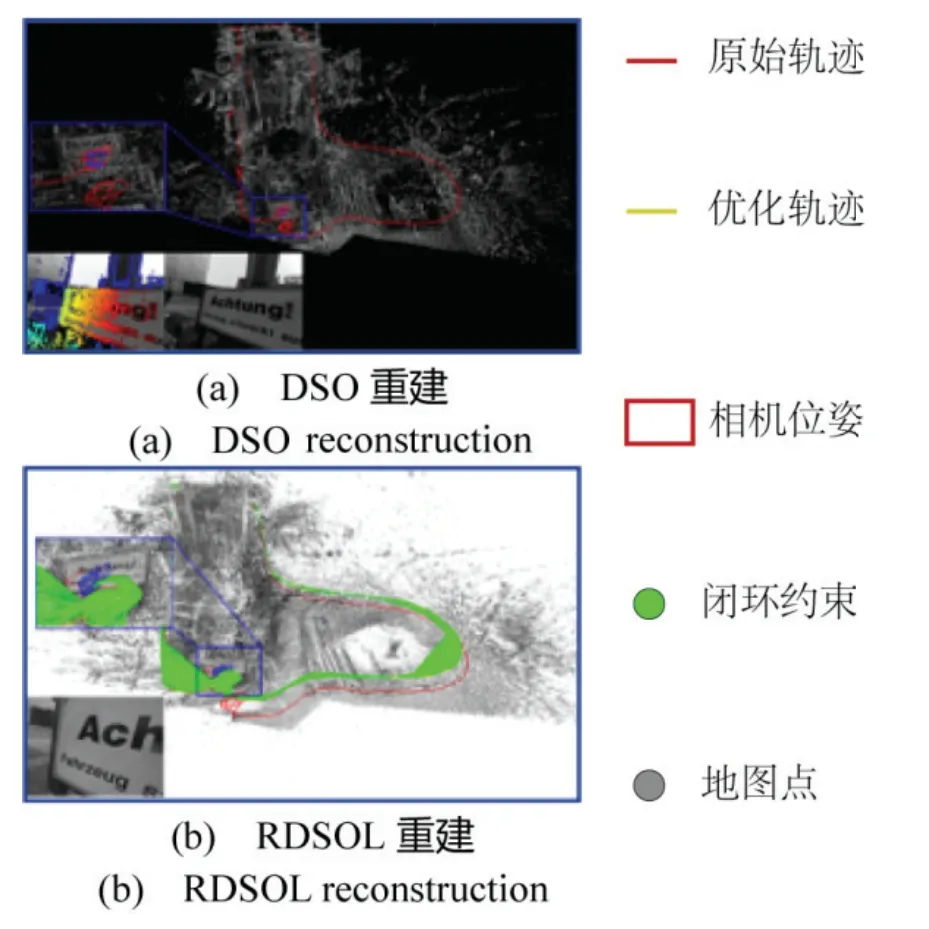
圖6 稠密三維重建效果Fig.6 Dense 3D reconstruction results
可以看出,兩系統(tǒng)的三維重建結(jié)果相類似,但DSO給出的閉環(huán)處(圖6(a)左下起點(diǎn)與終點(diǎn)處)存在較大偏差(即重影現(xiàn)象),表明起點(diǎn)與終點(diǎn)軌跡無法擬合,該累積誤差的產(chǎn)生將導(dǎo)致位姿漂移。而如圖6(b)左下部所示,軌跡在起點(diǎn)和終點(diǎn)處很好地?cái)M合在了一起,表明RDSOL 通過閉環(huán)檢測有效地消除了軌跡累積誤差,能夠?yàn)闄C(jī)器人定位與三維地圖重建提供更精準(zhǔn)的位姿約束,魯棒性好。
在計(jì)算速度方面,選取TUM數(shù)據(jù)集中具有不同圖像幀數(shù)的前10個(gè)序列Sequence01~Sequence 10,比較DSO與RDSOL的平均每幀耗時(shí),結(jié)果如表2所示。由于添加了閉環(huán)檢測線程,RDSOL需對圖像關(guān)鍵幀進(jìn)行特征檢測并對后端進(jìn)行全局地圖維護(hù),增加了每幀耗時(shí),故在圖像數(shù)目較多、地圖場景更為復(fù)雜的Sequence 04及Sequence05中,平均每幀耗時(shí)高于DSO。但由于省去DSO計(jì)算相機(jī)光度參數(shù)的耗時(shí),RDSOL 在幀數(shù)較少的情形中體現(xiàn)了更優(yōu)的執(zhí)行效率,前10個(gè)序列下對DSO的平均運(yùn)行加速比達(dá)到了10.91%,實(shí)時(shí)性有保證。
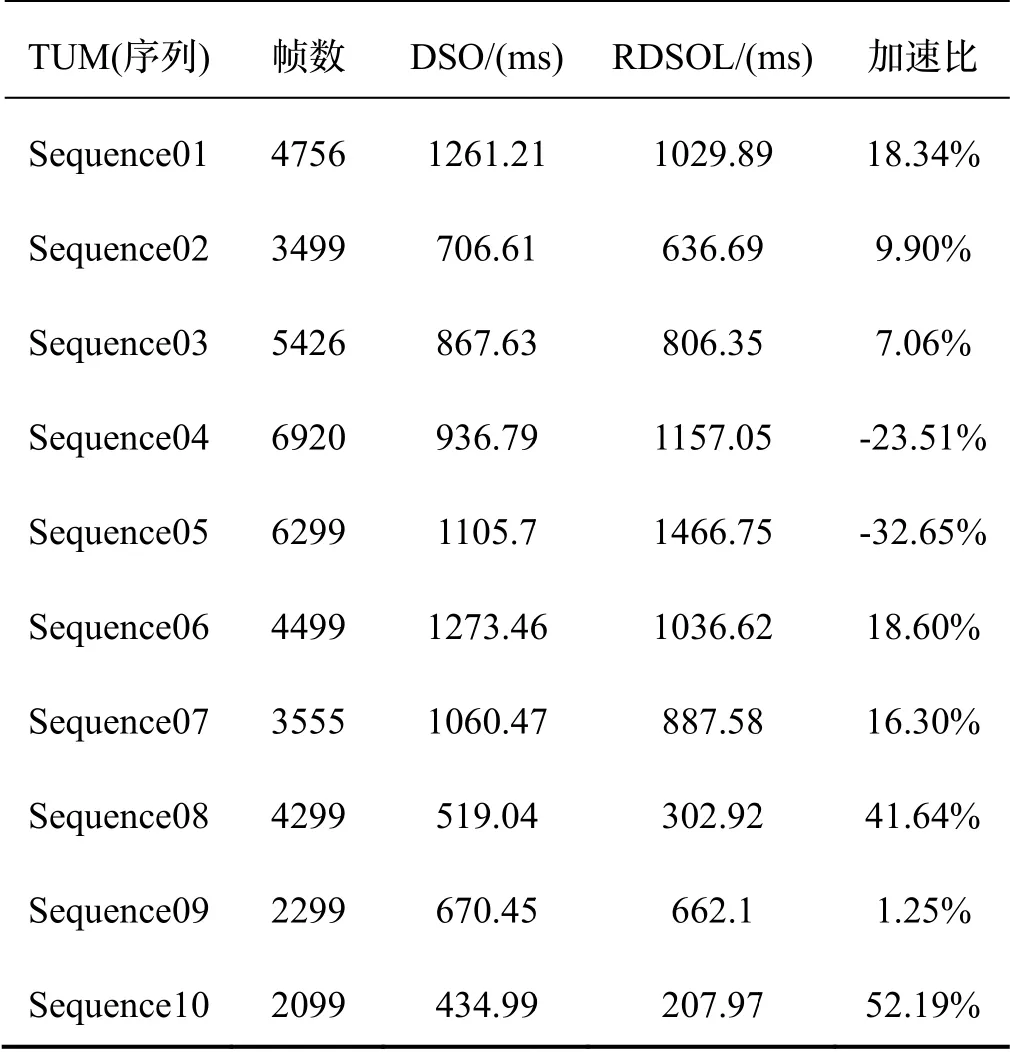
表2 DSO與RDSOL平均每幀耗時(shí)對比Tab.2 Averagetime consumption/ framecomparison between DSOandRDSOL
3.2 KITTI數(shù)據(jù)集實(shí)驗(yàn)
TUM-mono數(shù)據(jù)集僅有一部分真實(shí)軌跡,無法對機(jī)器人實(shí)際運(yùn)行的所有軌跡進(jìn)行對比。為此,選取KITTI數(shù)據(jù)集中的Sequence07序列(兼顧大尺度場景、多種程度光照變化及軌跡閉環(huán)),繪制軌跡跟蹤效果圖,并做出定量分析。
圖7 為DSO 與RDSOL在KITTI 圖像序列上運(yùn)行軌跡及真實(shí)軌跡(groundtruth 提供)情況。從圖中可以看出,DSO呈現(xiàn)較大的軌跡偏移誤差,產(chǎn)生此現(xiàn)象的原因是相機(jī)運(yùn)動通過同一位置后并沒有將初始環(huán)境閉環(huán),導(dǎo)致位姿漂移;而RDSOL 在初始位置處修正了位姿,故可以很好地恢復(fù)真實(shí)軌跡(圖8的x、y、z軸軌跡位置均更接近真實(shí)場景)。
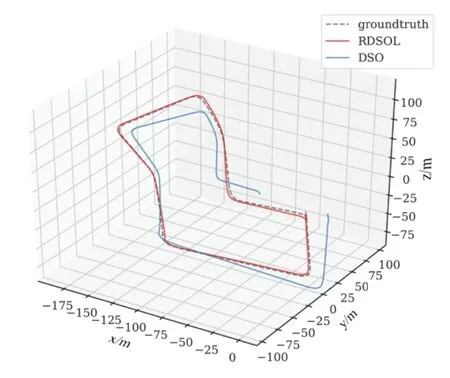
圖7 DSO/RDSOL/真實(shí)軌跡對比Fig.7 The trajectory comparison of DSO/RDSOL/groundtruth
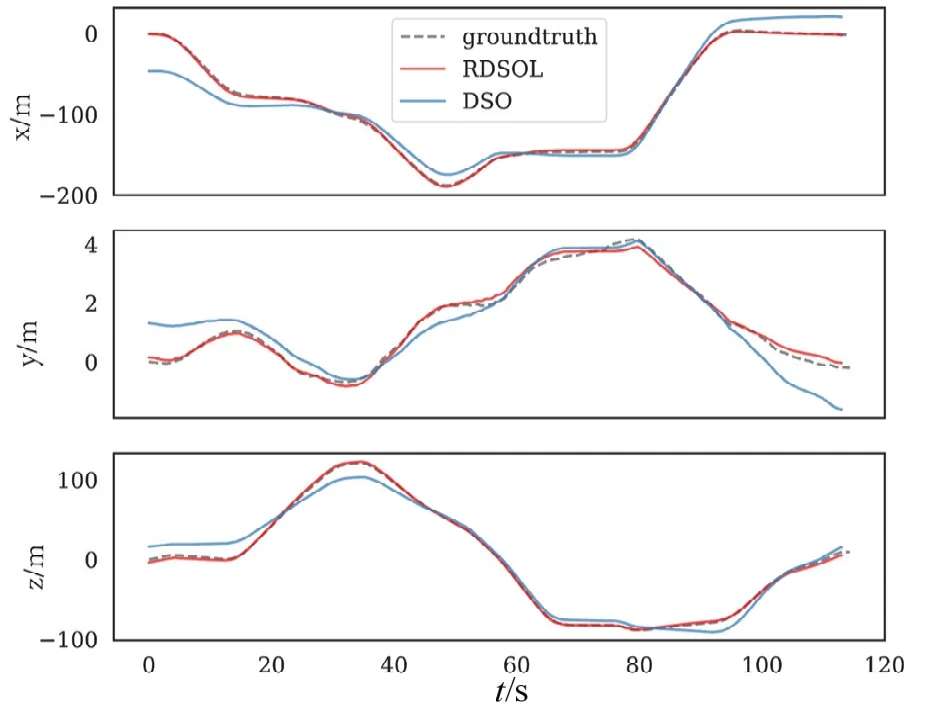
圖8 DSO/RDSOL/真實(shí)軌跡位置對比Fig.8 The trajectory position comparison of DSO/RDSOL/groundtruth
如圖9 所示,在歐拉角變化方面,盡管在初始0-10 s 階段,RDSOL 中翻滾角和偏航角出現(xiàn)了波動,但之后的追蹤過程RDSOL 都貼合了真實(shí)的歐拉角變化,追蹤精度優(yōu)于DSO。

圖9 DSO/RDSOL/真實(shí)角度對比Fig.9 The Euler angle comparison of DSO/RDSOL/groundtruth
進(jìn)一步對DSO 及RDSOL 在KITTI 上的表現(xiàn)做出量化分析。選取KITTI 上具有挑戰(zhàn)的10 個(gè)圖像序列Sequence 00~Sequence 09,給出DSO/RDSOL 在其上APE 的均方根誤差(RMSE)值,同時(shí)給出當(dāng)前廣泛應(yīng)用的ORB-SLAM2 的APE RMSE 以作比較,如圖10 所示。可以看出,RDSOL 與ORB-SLAM2 的表現(xiàn)相當(dāng),且在特征缺失的Sequence 01 與Sequence 06 序列中表現(xiàn)出更好的跟蹤精度,RDSOL 將平均APE RMSE 由60.22 m(DSO)大幅降為13.97 m,表明其在取得較好實(shí)時(shí)性的同時(shí),準(zhǔn)確性有保證。
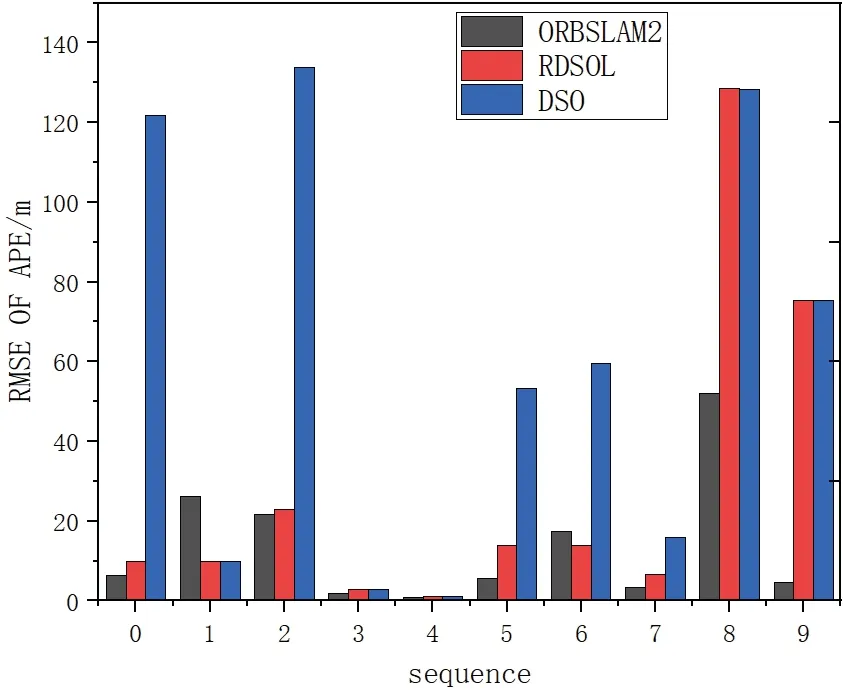
圖10 DSO/RDSOL/ORB-SLAM2 的APE 比較Fig.10 The APE comparison of DSO/RDSOL/ORB-SLAM2
3.3 實(shí)際場景測試
不同于數(shù)據(jù)集的固定場景及有限數(shù)據(jù)參考,實(shí)際場景測試可圍繞RDSOL 的兩個(gè)核心設(shè)計(jì)——單目Retinex 圖像增強(qiáng)、閉環(huán)檢測來開展。
選取ZED 系列雙目相機(jī)(單目工作模式)采集空曠的走廊場景(明顯弱紋理區(qū)且光照弱),圖像成像大小均為752×480。圖11 給出了對走廊3 個(gè)不同場景分別進(jìn)行原始圖像特征提取及單目Retinex 圖像增強(qiáng)后特征提取的對比圖,可以看出,后者可使機(jī)器人提取到更多的ORB 特征點(diǎn),使RDSOL 追蹤像素點(diǎn)的穩(wěn)定性更高,該圖像預(yù)處理設(shè)計(jì)達(dá)到了稀疏直接法的魯棒性要求。

圖11 不同光照下的特征點(diǎn)匹配結(jié)果Fig.11 Feature point matching results under different lighting conditions
三維重建的閉環(huán)性測試需要機(jī)器人的運(yùn)動軌跡構(gòu)成一個(gè)閉環(huán)場景,故令機(jī)器人從實(shí)驗(yàn)室前門出發(fā),經(jīng)過走廊繞行一周之后,再從實(shí)驗(yàn)室后門到達(dá)初始位置,實(shí)驗(yàn)場景如圖12 所示。

圖12 實(shí)驗(yàn)室以及走廊場景Fig.12 The scene graphs of lab and corridor
RDSOL在實(shí)際場景測試中無相機(jī)真實(shí)位姿參考,可通過其創(chuàng)建的三維稠密點(diǎn)云地圖對軌跡閉環(huán)特性進(jìn)行驗(yàn)證。可以看出,RDSOL 部分還原了上述實(shí)驗(yàn)室及走廊場景,如圖13所示。
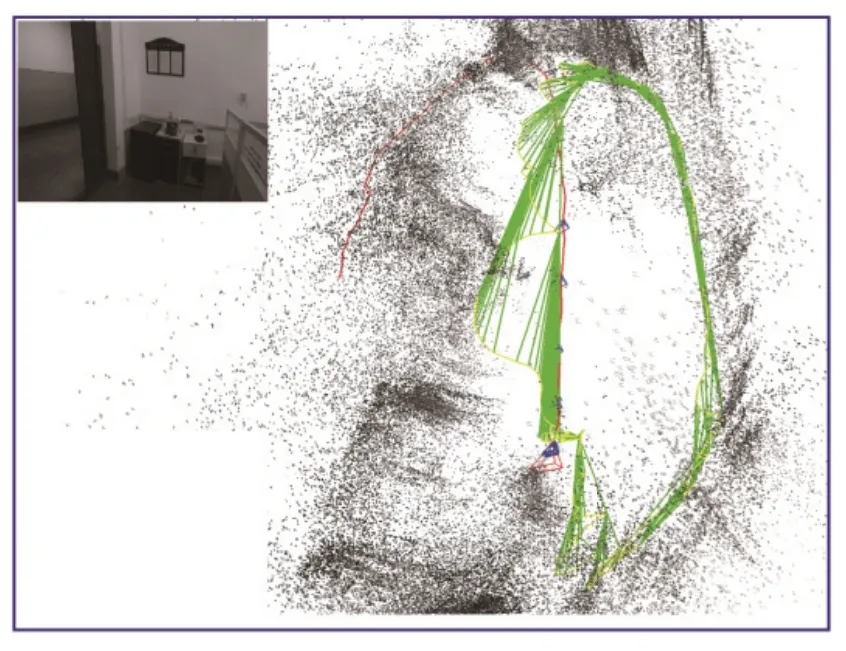
圖13RDSOL的實(shí)際場景三維重建效果Fig.13Thereal scene3D reconstruction result by RDSOL
機(jī)器人行走一周之后回到下圖中的前門初始位置(見圖13左上部,給出相機(jī)去畸變及Retinex 預(yù)處理后第2022幀,即最后一幀的灰度圖),軌跡構(gòu)成閉合。
4 結(jié)論
針對室內(nèi)弱光照、光照不均場景下機(jī)器人VSLAM三維重建問題,本文開發(fā)了一類基于稀疏直接法的RDSOL 系統(tǒng),利用單尺度Retinex 圖像增強(qiáng)代替DSO光度標(biāo)定,確保RDSOL 追蹤圖像像素點(diǎn)的穩(wěn)定性;構(gòu)建詞袋數(shù)據(jù)庫BoW,通過添加閉環(huán)檢測線程,消除位姿漂移累積誤差。開源數(shù)據(jù)集TUM-mono、KITTI 的實(shí)驗(yàn)結(jié)果表明,RDSOL 能夠較好地解決DSO因缺少閉環(huán)檢測造成的跟蹤失敗,并縮短三維重建的平均耗時(shí)。弱紋理、弱光照的走廊實(shí)景測試則進(jìn)一步驗(yàn)證了Retinex 圖像增強(qiáng)策略可改善像素灰度,避免ORB特征缺失,更利于直接法三維稠密點(diǎn)云地圖的構(gòu)建。所開發(fā)的RDSOL為單目VSLAM室內(nèi)實(shí)時(shí)三維重建提供了一定的參考及技術(shù)支持。
 中國慣性技術(shù)學(xué)報(bào)2021年2期
中國慣性技術(shù)學(xué)報(bào)2021年2期
- 中國慣性技術(shù)學(xué)報(bào)的其它文章
- 旋轉(zhuǎn)導(dǎo)向鉆井工具姿態(tài)測量陀螺儀故障估計(jì)與處理方法
- 基于等效樣本和實(shí)仿融合的現(xiàn)場小子樣試驗(yàn)制導(dǎo)精度評估方法
- 基于改進(jìn)飛蛾撲火算法的無人機(jī)低空突防路徑規(guī)劃
- 基于人體上肢運(yùn)動信息的助殘手抓取意圖識別方法
- 空芯微結(jié)構(gòu)光纖陀螺性能提升分析與驗(yàn)證
- A method of heating a spinning metal sphere in an elliptical rotating magnetic field with null-torque