面向小行星微重力環境探測的自恢復直立彈跳機器人設計
2021-08-13 00:29:06王永濱李雨航顧謝平蔣萬松陳金寶黃之峰
宇航學報 2021年6期
關鍵詞:結構
王永濱,李雨航,顧謝平,梁 浩,蔣萬松,陳金寶,黃之峰
(1. 南京航空航天大學航天學院,南京210016;2. 中國航天科技集團有限公司航天進入減速與著陸技術實驗室,北京 100094;3. 北京空間機電研究所,北京100094;4. 廣東工業大學自動化學院,廣州510006)
0 引 言
隨著中國空間探測領域持續擴展,進入深空開展對地外天體的科學研究和探測,勢必將帶動科學技術進步,促進工業發展,對人類文明產生深遠影響。小天體探測是深空探測領域的重要內容,是空間技術發展最活躍的技術領域之一。其成果能夠為太陽系的形成及其演化提供線索和依據,并對研究太陽系生命信息與系外行星、研究類地行星與太陽系演化、揭示地球生物起源有重要的指導意義;其上面稀缺物質資源可能成為未來人類開發和利用的寶庫。
目前地外天體巡視機器人主要有以下幾種:1)搖臂探測車。通過設計懸架構型連接車體與車輪,可以提高在運動中的抗傾翻和越障等性能,適用于火星等地表探測[1]。2)足式探測車。其具有高承載力,落點離散,地面適應能力強,適用于月球等地表探測[2]。3)飛行器。在火星等低大氣密度行星上進行大范圍探測具有較大優勢[3-4]。
但由于小天體附近引力微弱,表面不能提供足夠的摩擦力,因此小天體表面巡視器通常采用動量輪驅動或彈跳式方法。前者主要是基于角動量守恒原理,通過在機器人內部的動量飛輪高速旋轉所產生的慣性力實現機器人的運動[5]。這種移動方式對機器人落地后的姿態沒有太高的要求,但動量輪本身的質量和能耗制約了探測機器人的載荷任務能力,不適合于需要大范圍移動的數據采集及探索任務。而彈跳機器人越障、適應復雜地形地貌及有效承載的能力強,易小型化,在行星表面的微重力環境下其移動能力具有明顯優勢[6],特別適合用作星表探測機器人或子母式探測車的子體探測系統。然而,彈跳機器人要實現高效運動,所面臨的挑戰有兩點:1)如何在每次彈跳落地后,能夠重新恢復直立,從而使足底與地面完整接觸,實現二次跳躍;2)如何在低能耗的前提下獲得可觀的彈跳高度。
早在1969年,美國就提出研制跳躍機構用于月球探索機器人,以解決行星探測中探測車在崎嶇的地形中活動范圍有限的問題[7]。對小行星跳躍探測器研究較早的國家有美國和日本,其中美國國家宇航局(NASA)與加利福尼亞理工學院(CIT)聯合研制了一共三代小行星跳躍機器人[8];北京郵電大學的面向月球應用提出一種結構全封閉的球型移動機器人[9];加拿大航天局提出了一種用于星球表面探測器的新型跳躍機構[10]。像Scout機器人[11]和麻省理工學院的微型機器人[12],為了達成壓縮彈簧來完成跳躍的目標,這些機器人的機構僅僅是直接讓機器人撞擊地表來起跳,但是這種方式往往導致彈簧還未完全釋放能量機器人便已經離地。也有機器人通過六聯桿機械,例如EPFL跳躍機器人解決提前起跳的問題[13-15]。該系列的機器人還利用主動的尾部實現機器人自行恢復直立狀態。近年來,隨著技術發展,小型的單腿彈跳機器人已能夠實現連續不間斷的敏捷跳躍,文獻[16-17]通過多連桿結構采用電機直驅結合串聯彈簧蓄力緩沖的方式實現連續彈跳。研究強調跳躍的敏捷性而非低能耗,單次跳躍蓄能周期為0.1 s,平均消耗能量2 J。與落地后恢復直立的方案不同,該機器人利用了兩個風機及動量擺臂實現空中三個自由度的姿態調整。然而,風機的使用使該方案不適用于真空環境。另外一些學者則獨辟蹊徑,嘗試從仿生及材料的角度探索彈跳機器人的實現方案。文獻[18]提出了結合撲翼機構以提高了機器人彈跳高度的方法,而文獻[19-21]則針對軟體機器人利用材料特性分別提出了光驅動方式、化學反應產生爆炸及形狀記憶合金等方式實現跳躍。人類對小行星的探測才剛剛起步,截至目前為止,成功實現著陸小行星任務的機器人,僅2018年日本隼鳥2號在龍宮小行星上所釋放的MINERVA-II[22-23]以及MASCOT[22]。前者通過內置電機擺動及非電機驅動的彈性單元實現跳躍,后者則是利用擺錘結構實現單次的姿態調整。從公布的信息看,上述機器人尚未能實現在小行星表面的精確跳躍,然而對于完全未知的環境,任意落點均是值得探索的位置,即使是隨機非精確跳躍也有其應用價值。
上述研究中提出了各式各樣的彈跳機器人系統,根據動力裝置的工作方式歸結為蓄能形式和直驅形式兩種。前者盡管連續彈跳效率較低,但執行器功耗要求較小,更適合于在微重力環境下的小行星上進行探測任務。然而,在上述研究中,多數機器人不具備自行恢復直立狀態,或依賴于額外的動力部件實現直立[13-14],從而進行二次跳躍。這一局限性不利于在小行星這種地面結構復雜的環境中進行彈跳。
在本文中,針對上述提到的兩個挑戰點,提出了一種具有蛋形外殼的并聯腿彈跳機器人。利用合理的質心分布,使得機器人在無需其他裝置提供動力的情況下,僅依靠重力矩即可實現自行直立。同時,為解決低能耗下的可觀彈跳高度問題,本文面向并聯腿蓄能結構提出一個完整的彈簧剛度優化計算方法。
本文后續的章節安排如下,第二節介紹彈跳機器人的機構設計方案;第三節通過靜力學建模等方式討論的機器人主要結構參數的影響及優化方法;最后,在第四節中,通過樣機實驗驗證了本文的方案及方法的合理性。
1 機構方案
1.1 機構方案
彈跳機器人實現多次跳躍的關鍵在于如何保證每次跳躍后能夠自行恢復直立。文獻[14]采用特殊的主動尾部結構實現彈跳機器人自行恢復直立。然而,額外的主動尾部即耗費能量,又使得機構過于復雜,不利于小行星這種苛刻的環境。
根據機械能守恒的原理可以知道,不管是基于減速電機帶動擺臂支撐實現恢復直立,還是動量飛輪方案,恢復直立所消耗的能量最小不低于恢復過程中,質心高度變化所克服的重力勢能Eg=mgh,其中m為探測器質量、g為重力系數、h為質心的變化高度差。為了節省這一部分的能量消耗,本文在并聯腿結構的基礎上,設計了一個蛋形外殼,利用不倒翁原理,使得機器人能夠在收腿準備二次跳躍的過程中,通過重力矩作用自行恢復直立狀態(見圖1)。相比于本方案僅僅是改變外殼形狀獲得的恢復直立能力,其他的主動運動裝置恢復直立方案均需要使用到電機及其他相關的傳動機構,在零件,結構及控制上都要更加復雜,在一定程度上會增加整個系統的復雜程度,進而影響可靠性。
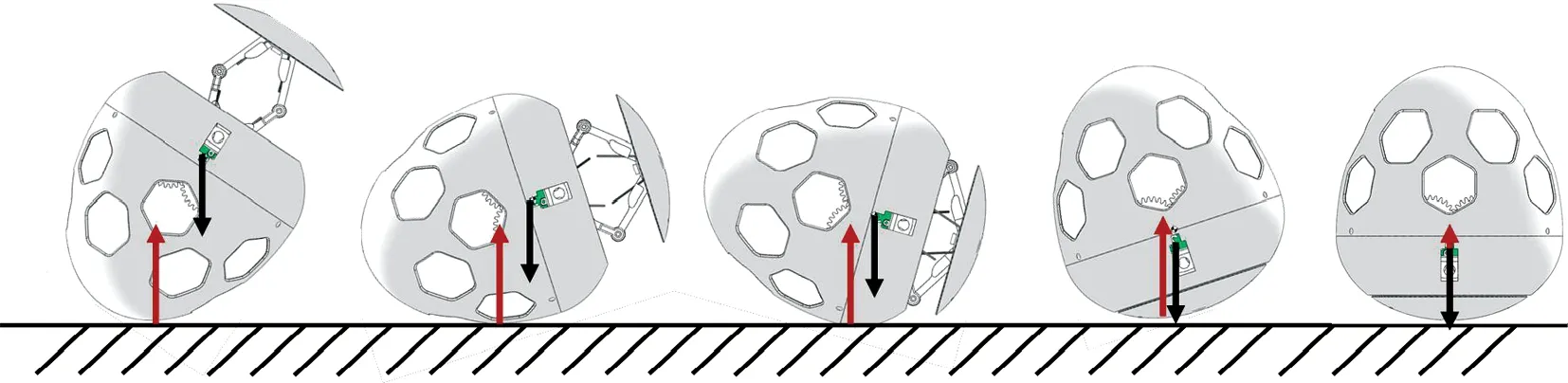
圖1 機器人收腿過程中利用重力矩恢復直立Fig.1 Robot legs during use of the weight moment of the upright recovery
機器人整體機構設計如圖2所示。整個蛋形外殼由上殼、中殼及底殼,三部分組成。其中,上殼帶有鏤空結構,用于安裝傳感器觀察窗及太陽能電池板;中殼為載荷艙,用于固定并聯腿機構及電池等質量較重的設備;底殼用于支撐。為了實現機器人收腿過程中的自恢復直立能力,以機器人質心為圓心的最小內切圓必須滿足切點在底殼中心的條件。圖2(b)展示了機器人的這一質量布局。此外,圖2(b)還展示了整個彈跳機器人的內部空間,可以看到,除了并聯腿外還有大量空間可以用于安裝任務載荷。
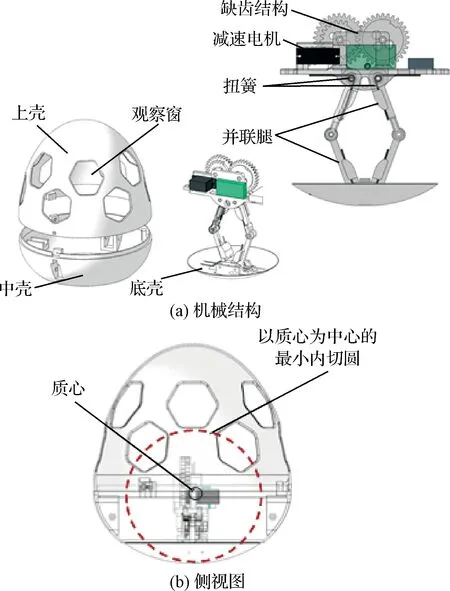
圖2 彈跳機器人機構設計方案Fig.2 Design scheme of bouncing robot mechanism
并聯腿結構[13]由四個長度相同的連桿組成,其中上下4個關節處各安裝有兩個扭簧。并聯腿的折疊通過收卷輪拉動連接底部支架實現。收卷輪由減速電機帶動。其中在最后一級的傳動中,帶動收卷輪的末級齒輪設計有缺齒結構。當未達到缺齒位置時,電機帶動收卷輪轉動并拉動連接底部支架的繩子,實現并聯腿的折疊。此時彈性勢能通過并聯腿對扭簧的壓縮存儲在關節處。當齒輪轉動到缺齒位置時,收卷輪將被瞬間釋放,從而并聯腿關節處存儲的彈性勢能快速釋放,實現起跳。
2 結構參數分析及優化設計
由于小行星帶間存在的互相遮擋,使得有效利用太陽能充電的環境條件惡劣,定期利用太陽能板充電的條件不能很好的保證。因此,小行星環境探測的首要問題是如何降低機器人運動過程中的能耗,從而增加續航時間并使得更多的能量用于傳感器及通訊等設備的探測任務。彈跳機器人運動過程中的能耗受諸多因素的影響,在有限的能耗條件下,既要考慮電機拉動彈簧進行蓄能的效率,又要考慮彈跳高度以及運動部件的質量分配。本部分首先從靜力學的角度分析并聯腿彈跳機構的受力情況,在此基礎上通過雙質量彈簧模型討論彈跳高度的估算,最后結合上述條件,提出對彈跳機器人的彈簧剛度及結構參數的優化設計方法。
2.1 靜力學模型
彈跳機器人考慮由單個電機提供轉動能量實現彈簧蓄能,因此,獲得壓縮彈簧過程中所需最大的拉力可以為接下來的參數選擇提供設計依據。如圖3所示,電機經過減速后利用收卷輪產生拉力拉動連接并聯腿底部支架的卷繩,實現對彈簧的壓縮。因此,靜力分析中著重于彈簧在豎直方向上的合力計算。
如圖3所示,并聯腿的上下四個關節裝有完全相同的扭簧,其中每個關節安裝有兩個扭簧。為了方便結構零件的替換,并聯腿采用完全對稱的結構進行設計。
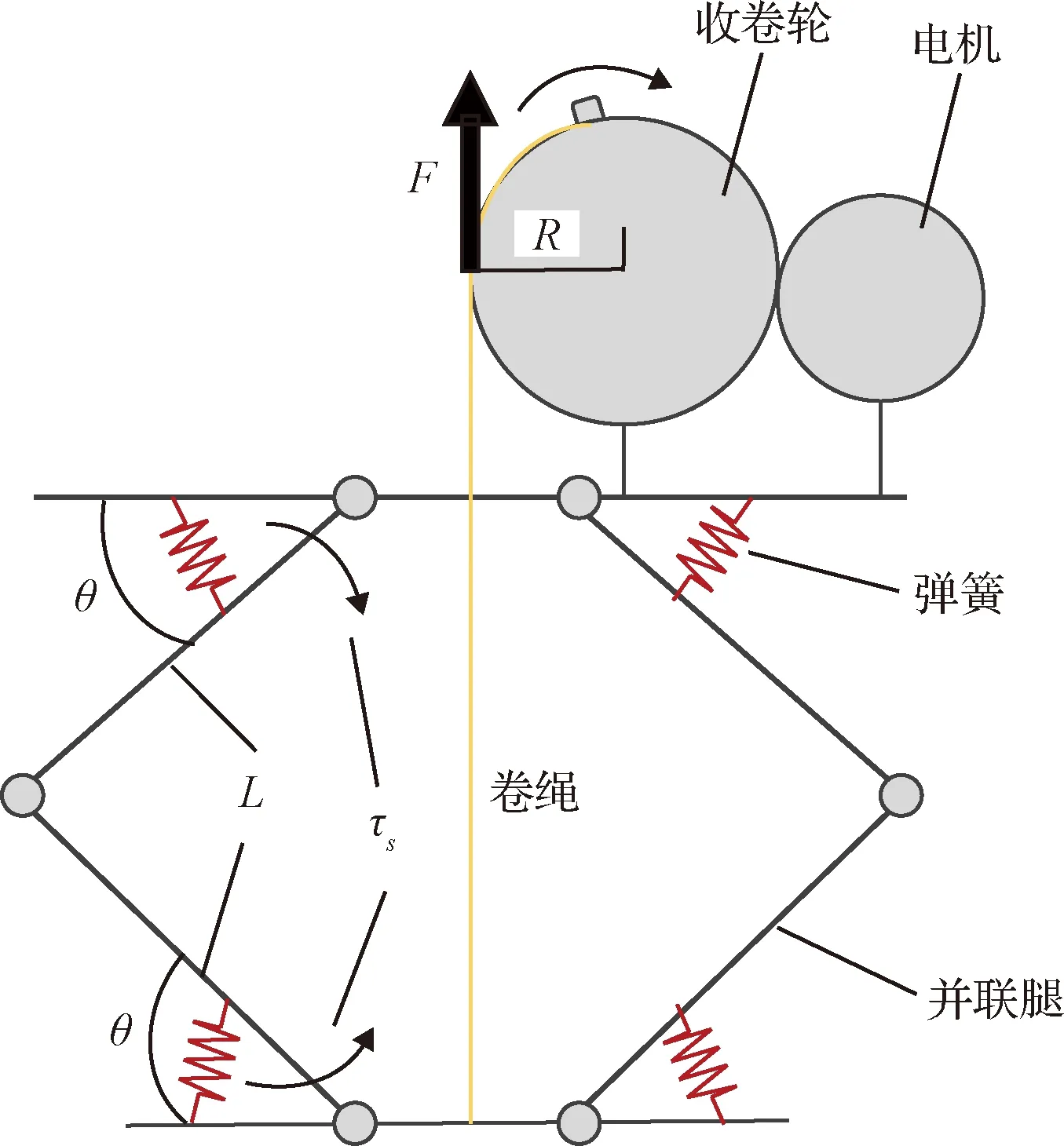
圖3 機器人受力分析Fig.3 Robot force analysis
根據機器人的對稱結構,文獻[15]的靜力分析結果可以進一步簡化為下式:
(1)
其中,F代表卷繩的拉力,L表示并聯腿的腿長,θ是并聯腿當前的偏轉角度,θ0是扭簧的在未受力的情況下的初始角度,k為彈簧的剛度系數,n是關節處安裝的彈簧的總數,如上文所述,在本文中n= 2。注意,這里的拉力F需要大于等于扭簧在豎直方向上的合力,才能剛好保持平衡或者以緩慢的速度上來實現壓縮。
根據式(1)給出的關系式,圖4給出了扭簧在豎直方向上的合力F與機構上并聯腿的θ角之間的關系算例。其中,扭簧剛度k取18.5 N·m/(°),并聯腿偏轉角度的取值區間在(0, 90) 之間。從圖4可以看出,盡管是非線性的關系,拉力F隨著角度的增加而減小。結果中需要注意扭簧自然張開下的初始角度θ0,對關系曲線的影響。當其小于等于90°時,拉力隨著角度增大而單調減小,即使是到達并聯腿死點90°處,由于此時扭簧的扭矩已經為零,F不會出現突然增大或無窮大的情況;然而,當θ0大于90°時,拉力在將在角度增大到一定程度的時候突然快速增加并達到無窮大,這是由于隨著角度增加力臂變小到接近于零,而在死點處扭簧扭矩不為零。此外,由給出的算例關系亦可知道,在剛度不變的情況下增加并聯腿的長度有利于減小所需的拉力。
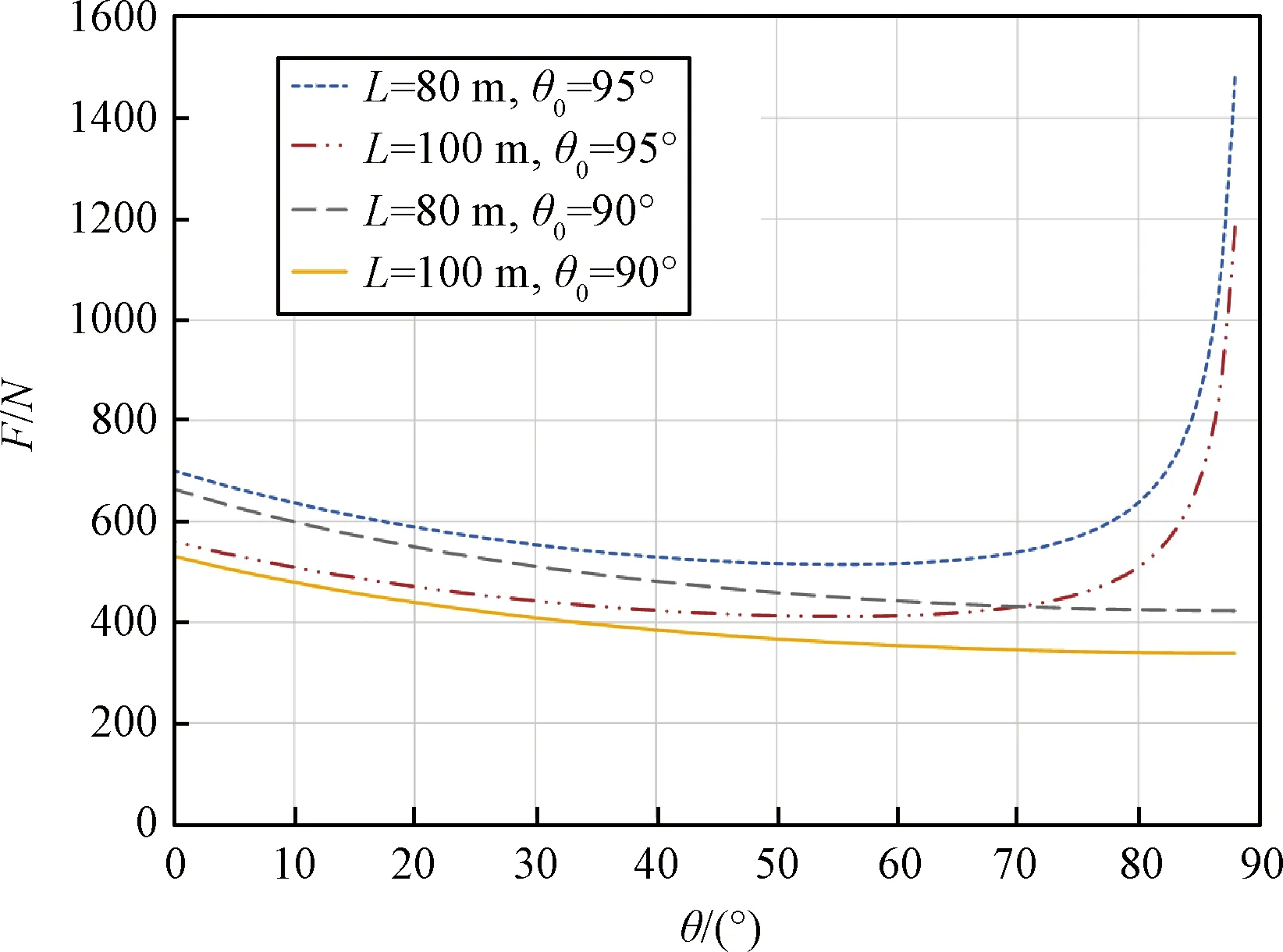
圖4 并聯腿角度與豎直方向合力的關系Fig.4 Parallel leg angle to the vertical direction force relationship
綜上所述,從上面的分析可以得出兩點結論:1)結構應選擇初始角度小于或等于90°的扭簧,從而避免在接近死點角度的位置產生過大的拉力。2)核算電機扭矩是否滿足收卷蓄能要求主要看并聯腿最大壓縮角處產生的豎直方向合力。
2.2 起跳高度分析
理想情況下,并聯腿結構的起跳過程可以簡化為由雙質量塊彈簧模型。彈性勢能存儲于兩個質量塊中間的彈簧內,其中上質量塊對應機器人的載荷,外殼及并聯腿上半部分,下質量塊對應并聯腿的下半部分及腳掌。彈性勢能的釋放過程分為兩個階段:1)勢能全部轉為上質量塊的動能和重力勢能;2)當彈簧恢復原長或釋放完畢,上質量塊與下質量塊發生完全非彈性碰撞,兩者速度瞬間達到一致并繼續運動,直到所有動能轉換為重力勢能即到達最高點。
起跳高度可以通過下式進行估算。
(2)
其中,
(3)
進一步簡化得:
(4)
式中:H為最終彈跳高度,E0為存儲的彈性勢能,η為彈性勢能的轉換效率,主要取決于載荷質量與并聯腿質量之間的比值以及關節內可能的摩擦損耗,根據動量守恒及能量守恒定律可知,上質量塊與下質量塊的比值越大,轉換效率越高。k為彈簧的彈性系數,θ1為并聯腿伸展時的角度,θ2為并聯腿被壓縮時的最大角度,Δθ為兩者之差。
由上式分析可知,在剛度以及能量轉換效率一定的情況下,壓縮角度差越大彈跳高度越大。
2.3 結構參數優化
結合上述分析可以看到,彈跳機器人設計過程中,需要平衡諸多參數之間的相互影響。彈跳的高度依賴于更高剛度的彈簧和壓縮角度,然而這需要功率更大的電機、對于減輕重量、減小蓄能周期和能耗不利。為了減少功耗,騰出更多的任務載荷,需要在較小的電機功率的情況下,選擇合適的彈簧和結構參數以實現最大的跳躍高度。
因此,在本節中結合前面兩節的結論以及本文中的機構設計方案特點,給出如下的多參數優化方法。優化問題定義為,給定電機扭矩的條件下如何選取彈簧剛度及結構參數,實現最大跳躍高度。問題如下式(5)-(11)所示,
(5)
約束條件:
(6)
(7)
θ1-θ2≥0
(8)
0≤θ1≤θ0
(9)
L>0
(10)
R>0
(11)
其中,約束條件1,不等式(6)描述的是靜力平衡約束,即扭簧在豎直方向合力要小于等于電機在收卷輪上面產生能夠產生的最大拉力。根據式(4),增大彈簧剛度和壓縮角度差Δθ都有利于提高彈跳高度,但由于靜力平衡約束條件,兩者之間存在制衡,如果剛度太大,則在電機扭矩一定的條件下只能減小壓縮角度。
約束條件2,等式(7),描述的是收卷輪卷線的幾何約束關系。本文的機構利用帶有缺齒結構的收卷輪卷動繩子實現對并聯腿的壓縮(2.2節)。由于缺齒結構的存在,收卷輪轉動的角度α小于2π。該約束意味著,給定目標壓縮角度以α角度的約束。反之收卷輪半徑給定的情況下,如果,腿長過長,則無法實現目標的壓縮角度。
其他不等式(8)~(11)則分別是各參數的上下限約束。
約束條件1和約束條件2相互關聯,在扭矩一定的條件下,減小收卷輪半徑可以增大拉力,從而選用更大的剛度,但是半徑的大小受到幾何約束的限制,太小則無法實現對并聯腿的完整壓縮。
本文中采用了二次序列規劃方法(SQP)對上述問題進行求解。根據2.2節中的機構設計參數,進行計算求解最佳跳躍高度所對應的剛度系數、最大壓縮角以及收卷輪半徑。
計算結果如圖5所示,在收卷電機扭矩給定的條件下,彈跳高度主要取決于允許的最大壓縮角度差Δθ,角度越大,實際上能彈跳的高度越小。在高度極限條件下所需要的剛度也越小。圖中還可以看出,初始壓縮角度θ1對于彈跳高度的影響,同樣的壓縮角度條件下,初始壓縮角度越大,則允許起跳高度則越高。

圖5 壓縮角度差與允許彈跳高度的關系Fig.5 Angle difference relationship between height and bounce allows compression
盡管小的壓縮角度有利于提高跳躍高度,但是過高的彈簧剛度在工程上難以實現,同時,對于電機收卷輪和減速比的要求太過苛刻。圖6和圖7給出了算例中,不同壓縮角度差下,對應最大高度所需的剛度。從圖中可以看出,隨著壓縮角度差的增大,剛度系數快速遞減。

圖6 壓縮角度差與滿足最大高度的彈簧剛度關系Fig.6 Angle difference relationship between height and bounce allows compression

圖7 壓縮角度差與滿足最大高度的彈簧剛度關系局部放大圖Fig.7 Compression meet the maximum angular difference and the spring constant height relationship enlarged view
3 樣機實驗
實驗選取了硬質瓷磚及沙石兩種地面,驗證機器人的實際彈跳高度以及落地后在收腿過程中的自恢復直立能力。實驗開始時,機器人均處于伸腿臥倒狀態。實驗開始后,機器人在收卷電機的作用下逐漸收腿,并利用重力矩恢復直立(圖8(a~f),圖9(a~d))。在恢復直立瞬間,由于缺齒結構的作用,彈性勢能釋放,實現跳躍(圖8(g~j),圖9(e~i))。此后,機器人重新落地,并重復前面的動作,再次實現起跳。機器人的跳躍高度約300 mm左右,沙土地面略低于瓷磚地面。
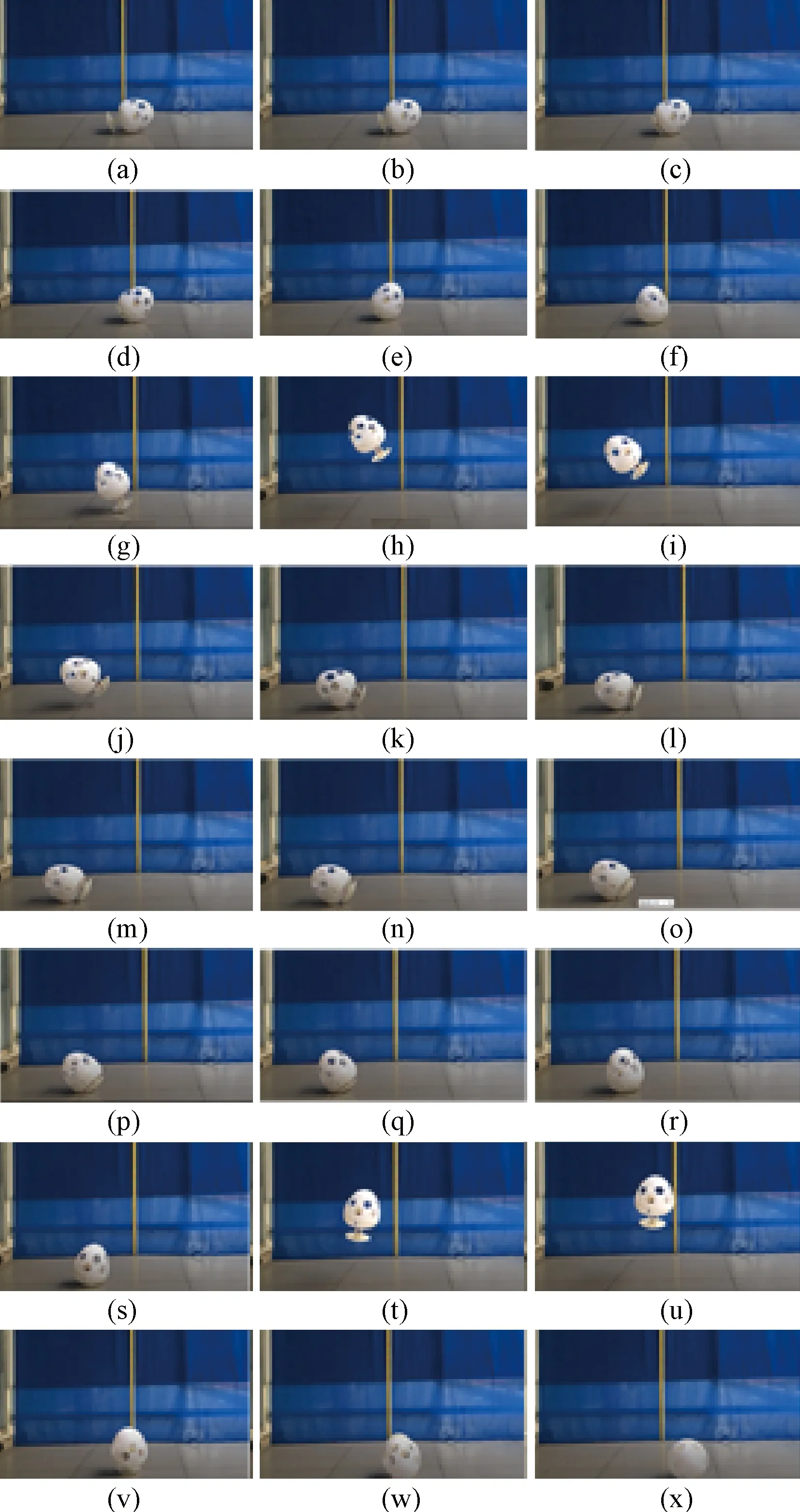
圖8 機器人在硬質瓷磚地面實現自恢復直立及二次彈跳Fig.8 Robot achieves self-recovery upright and secondary bounce on hard ceramic plane
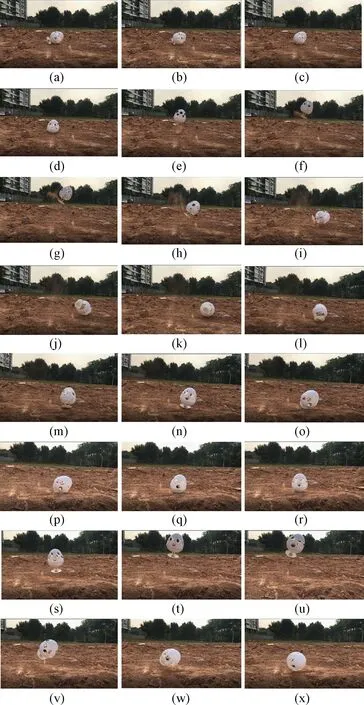
圖9 機器人在沙石地面實現自恢復直立及二次彈跳效果Fig.9 Robot achieves self-recovery upright and secondary bounce on sand and gravel ground
為檢驗機構方案的實際效果,包括自恢復直立多次彈跳以及彈跳高度,本研究通過3D打印手段制作了原理樣機進行實驗驗證。其中,并聯腿結構整體采用ABS材料制作,保證強度的同時具有一定的韌性;外殼則采用PLA材料打印,具有更高的強度以應對落地產生的沖擊。機器人的主要設計參數依據前文的理論推導作為依據進行計算選型,如表1所示。
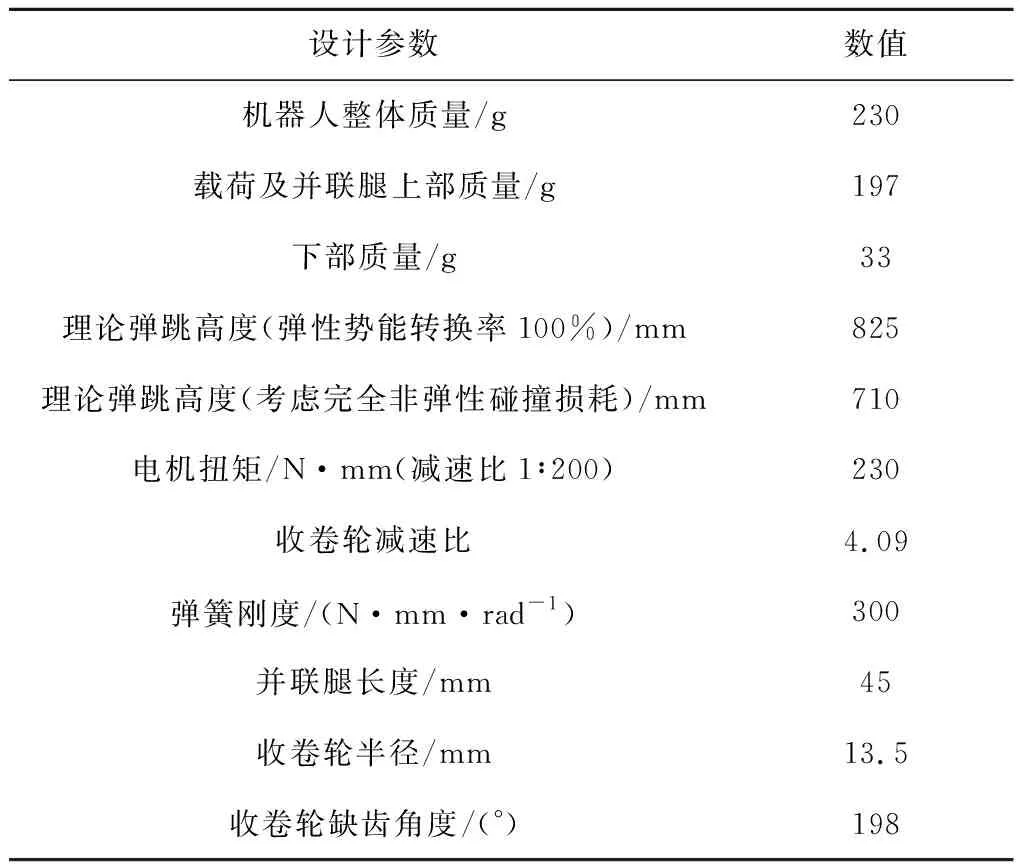
表1 彈跳機器人主要設計參數Table 1 Main design parameter of the jumping robot
機器人單次跳躍蓄能周期為2 s左右,電機供電電壓3.7 V,電流80 mA,消耗能量約為0.59 J,約為文獻[16]的30%。
實驗結果有效地驗證了機器人機構設計方案的有效性,機器人能夠在平整地面(瓷磚)及非平整地面(沙石)上實現不依賴額外動力機構的條件下自恢復直立,并實現重復起跳,表現出了較好的環境適應能力。
從實驗結果看,機器人的彈跳高度并未達到雙質量塊彈簧模型所計算的理論高度,僅為實際計算值的42%。原因有如下幾點:1)雙質量彈簧模型僅僅是對機器人的近似,兩者并不完全一直,起跳過程中的非完全彈性碰撞損耗實際更大;2)機器人本身各個關節的鉸鏈存在一定的摩擦損耗。上述問題和原因有待在接下來的研究中進行分析和探究。
通過樣機實驗還可以發現,機器人的跳躍落點分布呈現一定的隨機性。這主要受兩個因素的影響。1)機器人起跳前并未完全直立靜止,且存在一定的擺動速度,因此會導致起跳時存在一個水平的速度和自轉;2)由于地面存在一定的非平整性,例如實驗中的沙土地面,機器人并未完整恢復直立而是略有傾斜。盡管落點隨機,結合目前已登陸小行星的探測機器人的任務執行情況看,由于小行星是完全未知的環境,任意位置都是值得探索的地方,即使是跳躍的落點隨機分布,其對初期探測依舊是有意義的。
定點定向跳躍是實施更加復雜、精確的地外探測任務的重要功能。然而,如何在復雜且崎嶇的地形中實現定點定向跳躍是一個復雜的多因素問題,與地形、地質、機器人本身的結構,空中的姿態控制以及落地后的起跳調整都存在聯系。即使是參考先前研究,通過增加質量擺錘的方法也并不能很好地解決。這一問題將在今后的進一步研究中繼續展開。
此外,考慮到彈跳時,巖石可能會卡入底座與蛋殼之間的縫隙,在今后的工程樣機設計中將考慮增加外殼密封的柔性防護網等方法。
4 結 論
本文以小行星探測為背景,提出了一種具有蛋形外殼,能夠自恢復直立能力的并聯腿彈跳機器人。研究通過理論分析給出了結構參數之間的約束關系和彈簧剛度的計算方法。在實際樣機實驗中,有效地驗證了設計的有效性及優化計算方法的可行性。得出如下結論。
1) 方案所提出的蛋形外殼方案,能夠實現機器人在無需額外動力裝置的條件下自行恢復直立,從而使得多次跳躍成為可能。
2) 針對彈簧剛度及結構參數的優化方法,能夠有效優化并聯腿彈跳機器人的結構及可跳躍的最大高度。
猜你喜歡
小獼猴智力畫刊(2023年4期)2023-04-23 08:49:58
哲學評論(2021年2期)2021-08-22 01:53:34
中華詩詞(2019年7期)2019-11-25 01:43:04
模具制造(2019年3期)2019-06-06 02:10:54
中學生數理化·高一版(2018年1期)2018-02-10 05:20:03
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
七彩語文·寫字與書法(2016年7期)2016-07-28 21:40:22
七彩語文·寫字與書法(2016年6期)2016-07-15 19:36:34
人間(2015年21期)2015-03-11 15:23:21
現代企業(2015年9期)2015-02-28 18:56:50
