考慮動態控制分配的空天飛行器再入姿態復合控制設計
2021-08-13 00:29:56李旦偉章吉力
宇航學報 2021年6期
董 哲,劉 凱,李旦偉,章吉力
(1. 大連理工大學航空航天學院,大連 116024;2. 沈陽飛機設計研究所,沈陽 110035)
0 引 言
本文的研究對象空天飛行器(Aerospace vehicle, ASV),是指能夠在稠密大氣層、臨近空間和近地軌道上自由往返、水平起飛并可重復使用的新一代運載器[1-3]。空天飛行器再入飛行階段具有飛行包線大、動力學特性變化劇烈、橫側向氣動耦合顯著以及異類執行機構復合任務復雜等特點,給再入姿態控制問題帶來了挑戰[4-6]。
再入控制方面,傳統增益調度控制(Gain scheduling, GS)方法是目前應用最廣泛的飛行控制律,在飛行包線內選取若干工作點的線性模型,利用線性系統理論設計控制器[7-9]。非線性動態逆控制(Nonlinear dynamic inversion, NDI)方法使得非線性和線性兼容而無需復雜的增益調度,文獻[10]將NDI和PID控制結合,使帶有參數攝動的閉環系統具有良好的魯棒性能。當研究對象的數學模型不夠精確時,文獻[11]設計了自適應模糊滑模控制器,通過模糊逼近法則對控制器進行了補償;文獻[12]針對X-43飛行器設計了基于Terminal滑模方法的姿態控制器,明顯減小高頻噪聲的同時提升了系統魯棒性。此外,模型預測控制(Model predictive control, MPC)方法也得到了愈發廣泛的應用,該方法在一組未來輸入上優化指定的性能指標,以最小化未來輸出偏離指定軌跡的誤差[13]。文獻[14]將其推廣到了非線性高性能航空航天系統中,獲得了良好的動態軌跡跟蹤能力。文獻[15]將NDI與約束線性MPC相結合,實現了最優控制并通過狀態約束在控制律設計中反映了性能要求。
指標分配方面,空天飛行器再入過程包含大氣稀薄、動壓小的階段,需設計一定的分配方法實現RCS和氣動舵面的復合控制。非優化分配方法有直接法、鏈式遞增法等;優化分配方法有線性規劃法、迭代偽逆法、最小二乘法等[16]。文獻[17]提出了一種菊花式鏈接(Daisy-Chaining)控制分配算法,將飛行器的執行機構按優先級分成若干組,每一級執行器達到飽和后指令便會輸入進下一級執行器中。文獻[18-20]針對一些中小規模約束的分配問題,提出了連續最小二乘和加權最小二乘分配算法,具有較好的分配精度和較快的運行速度。文獻[21]采用二次規劃對氣動舵面力矩指令問題進行求解,仿真結果表明混合分配方法可有效實現執行冗余機構的高精度分配。目前已有的優化分配方法,其性能指標多考慮分配精度和反作用控制系統燃料消耗,未考慮由于整體閉環控制系統響應速度的需求。
在相關學者研究的基礎上,本文針對ASV再入段面臨的控制分配問題提出了改進性解決思路。首先,建立了ASV再入姿態動力學模型;然后,從控制精度和工程應用可行性出發,構建了基于ASV動力學模型的模型預測控制器,并在橫側向通道中針對氣動耦合問題引入了交叉耦合反饋項,以提高橫側姿控穩定性;同時,本文提出將閉環控制系統響應速度納入力矩分配優化指標,建立了基于二次規劃的按需動態分配算法,使用響應迅速的RCS執行快變化力矩指令,而氣動舵面則用于響應慢變化力矩指令,實現了ASV再入段氣動舵面和RCS的復合控制分配。
1 空天飛行器姿態動力學模型
考慮再入階段ASV由RCS和氣動舵面共同控制,在文獻[22-23]的基礎上,可得機體坐標系下的ASV再入段姿態動力學模型為:
(1)

本文采用一階慣性環節來描述指令到實際偏轉的動態過程:
(2)

2 再入姿態控制律設計
空天飛行器再入過程中的異類執行機構有氣動舵面和RCS反作用控制系統,因此本文即研究如何使這兩種執行機構協同工作來完成ASV再入過程的姿態控制問題。ASV再入段復合控制流程圖如圖1所示:
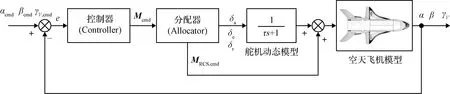
圖1 ASV再入復合控制流程圖Fig.1 Flow chart of ASV reentry compound control
圖1中αcmd,βcmd和γV,cmd分別為攻角、側滑角以及速度滾轉角的指令角度;Mcmd為控制律產生的三通道指令力矩;MRCS,cmd為其中分配給RCS的力矩指令;δa,δe和δr分別為副翼舵偏、升降舵偏和方向舵偏。
2.1 縱向預測控制設計
不同于傳統控制律,MPC不僅使用當前和過去之間被控量的偏差值,還使用預測模型來預測未來時刻的偏差值,然后使用滾動優化模塊使得控制變量與期望值之間的偏差最小,以確定當前時刻最優的控制策略。
首先,基于式(1)中的ASV姿態動力學模型,利用泰勒展開法得到如下縱向離散預測模型[24-26]:
(3)
然后,建立滾動優化函數:
(4)

(5)
(6)
(7)
令?J/?U=0,解式(4)表示的優化問題,并將最優控制輸入序列的第一個值作為ASV的控制力矩指令:
(8)
Mz,cmd=[1, 0, 0, …, 0]Uopt
(9)
連續控制力矩Mz,cmd輸入進RCS執行機構中時,由于其離散的工作特性,常常需要利用PWM脈沖調制將Mz,cmd離散化,進而使RCS響應控制指令。上述MPC控制律工作流程如圖2所示。
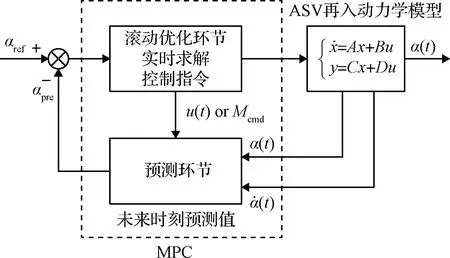
圖2 縱向通道MPC工作流程圖Fig.2 Flow chart of longitudinal channel MPC
2.2 橫側向耦合預測控制設計
空天飛行器再入過程橫側向通道氣動耦合嚴重,由姿態動力學知偏航通道耦合有滾轉姿態項,同時滾轉通道耦合有偏航姿態項。
本文采用耦合控制方案實現橫側向MPC控制律的設計:在滾轉通道引入交叉耦合反饋項Kβ·β進行姿控增穩,通過側滑角β在異通道的反饋,減小因指令突變產生的控制超調,提高被側滑角β和滾轉角γV的穩定性。
利用泰勒展開獲得橫側向耦合離散化預測模型:
(10)
(11)
(12)
(13)
與俯仰通道同理,建立基于離散預測模型的橫側向滾動優化函數如下:
(14)
令?J1/?U1=0、?J2/?U2=0,解式(14)表示的優化問題,并將最優控制輸入序列的第一個值作為控制指令:
(15)
(16)
至此,便獲得了橫側向通道的耦合預測控制律,其中滾轉角的預測向量中包含著交叉耦合系數Kβ。
上述橫側向耦合通道MPC控制律工作流程如圖2所示。
圖3 橫側向耦合通道MPC工作流程圖Fig.3 Flow chart of lateral coupling channel MPC
3 基于二次規劃的動態分配律設計
控制分配問題用數學方式描述即
BUr=Mcmd
(17)
式中:B為控制效率矩陣;Mcmd為力矩指令向量;Ur為各執行機構的實際動作量。本文中單通道復合控制的控制效率矩陣和機構實際動作量可表示為:
Ur=[δ,Kr]T
(18)
(19)
式中:δ為δ=[δa,δr,δe]T舵偏向量中的任一舵偏;Kr為Kr=[Kxr,Kyr,Kzr]T向量中的任一元素,表示各通道RCS力矩指令占總力矩指令的占比;Mcmd為Mcmd=[Mx,cmd,My,cmd,Mz,cmd]T向量中的任一元素,表示各通道力矩指令向量;m為m=[mx,my,mz]T向量中的任一元素,表示各通道的力矩系數。
目前采用優化分配算法的文獻中多將分配誤差和執行消耗作為優化指標[18-21],未考慮執行機構的工作特性。本文對優化指標進行改進,基于二次規劃提出了一種考慮執行機構響應速度的按需動態分配算法:
(20)

(21)
當需用力矩變化率Γ增大的時候氣動舵使用傾向度μ減小,則RCS使用占比增加,用響應快的RCS來執行快速變化的力矩指令;反之,氣動舵面使用度增加,以減少RCS能量損耗。需要說明的是上述控制分配模型是針對單通道建立的,且適用于各飛行通道。
4 仿真校驗
4.1 仿真參數輸入
本節對前文所建立的空天飛行器再入段姿態控制律和控制分配律進行仿真驗證與分析。首先,給出仿真所需的部分ASV結構參數與氣動參數如表1所示。
表1 仿真參數Table 1 Description of simulation parameters
4.2 三通道仿真
再入過程復合控制階段(597~851 s時段):取αc0=50°,βc=0°,γVc為±45°方波指令;該階段飛行初始高度為82 km,飛行速度為Ma25。為驗證所提方法的魯棒性,加入氣動力矩系數的±40%拉偏,得到下圖所示的三通道姿態跟蹤仿真曲線,由上到下分別為攻角α、側滑角β和速度滾轉角γVc的響應曲線,其中包括正常氣動力矩系數和氣動力矩系數拉偏下的響應曲線,以及姿態角指令曲線。
由跟蹤曲線可知,本文采用的MPC控制器具有較高的控制精度,同時能夠很好地抑制外部干擾,對氣動參數的攝動具有較好的魯棒性。
4.3 橫側向耦合控制對比仿真
空天飛行器再入過程橫側向通道氣動耦合嚴重,本文引入了交叉耦合反饋系數,采取在滾轉通道中加入偏航通道狀態反饋的方法,以減小指令突變導致的姿態控制振蕩,與解耦控制對比仿真結果如圖5所示。
圖4 三通道姿態角跟蹤曲線Fig.4 Three-channel attitude angle tracking curve
圖5 耦合通道姿態角跟蹤曲線對比Fig.5 Coupling channel attitude angle tracking curve
由圖分析知,與無β反饋相比,有β反饋的耦合控制方法在出現γV指令符號反轉的情況下具有較小的超調量,能夠快速平穩地完成狀態的轉變。
4.4 動態控制分配仿真
以俯仰通道為例,利用MATLAB分別求解加權最小二乘控制分配問題和本文改進的基于二次規劃的按需動態控制分配問題(20),得到對應的RCS力矩占比,并用于再入姿態控制仿真。然后通過對比復合控制階段攻角跟蹤誤差以及RCS流量消耗來說明按需動態控制分配方法的優勢:
圖6分配評估曲線中,第一張為采用兩種分配方法進行復合姿態控制時的攻角跟蹤誤差,反應分配方法對控制精度的影響。標稱值為圖4中的攻角期望值,620 s附近發生突變。按需動態分配方法得到的跟蹤誤差峰值降低為加權最小二乘分配方法的50%以下;第二張為采用兩種分配方法時的復合控制階段RCS使用比例,按需動態分配方法在該階段調用RCS的平均比例約為0.2%,相對于不加入響應速度需求的方法的8.3%有了一定程度降低,在實現分配精度的同時有效減少了RCS的燃料消耗。
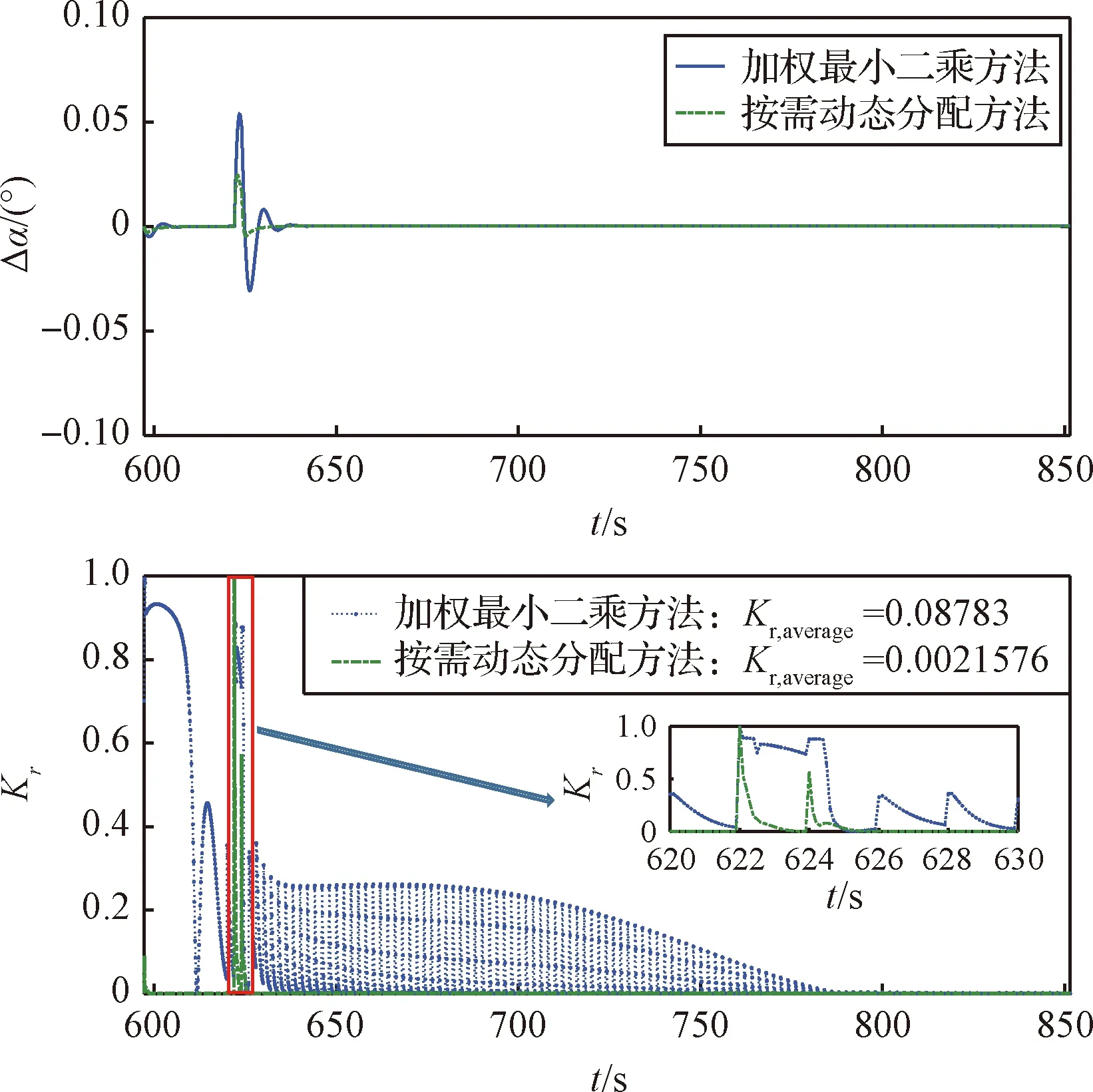
圖6 分配方法評估曲線Fig.6 Allocation method evalution curve
5 結 論
本文針對空天飛行器再入過程異類冗余執行機構的復合控制分配問題,設計了基于二次規劃的按需動態分配律,以模型預測控制律輸出的指令力矩的變化快慢以及執行機構的響應速度為依據,實現了姿態準確跟蹤的同時節省了RCS流量消耗。最后,通過對比仿真分析,驗證了該按需動態分配策略的有效性。
猜你喜歡
科普童話·神秘大偵探(2023年1期)2023-05-30 12:48:10
鐵道通信信號(2020年9期)2020-02-06 09:15:22
數學大王·趣味邏輯(2019年5期)2019-06-13 20:27:43
小學科學(學生版)(2019年5期)2019-05-21 01:00:18
測控技術(2018年5期)2018-12-09 09:04:26
經濟技術協作信息(2018年30期)2018-11-22 06:20:24
電子測試(2018年18期)2018-11-14 02:30:34
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
