建筑施工機器人技術的應用與發展
2021-08-13 00:44:12張皓涵
廣東建材 2021年8期
張皓涵
(佛山市順德區碧桂園物業發展有限公司)
0 概述
我國建筑行業處于高速發展階段,但是機械化、自動化程度低下,房地產企業的過度開發和施工的高負荷運轉,使得建筑施工過程漏洞百出。當前階段,我國建筑行業依舊存在如下問題:
⑴勞動力短缺。這一直是建筑公司面臨的主要挑戰,有一大部分的建筑公司找不到合適的工人。建筑行業工作環境惡劣,這使得年輕建筑工人的比例逐年下降,員工流動率逐年上升,在所有的行業內占比最高。極大的員工流失率成為企業的沉重負擔,建筑行業的薪資的提升,并沒有提升建筑工人的工作滿意度,有一小部分的工人表示缺乏相應工具來幫助他們更好地完成工作。
⑵施工安全性差。建筑工作是一項危險的工作,我們通常所說的建筑類工作包括建造房屋、道路、樹木堡壘、工作場所以及維修和保養基礎設施。這些工作包括了許多危險任務及惡劣條件,如工作的高度,噪音,灰塵、毒害、輻射、電動工具和設備等。建筑業最常見的死亡原因有四種:高空墜落、被物體擊中、觸電以及器械誤傷。每年因建筑事故導致死亡的人數居高不下,這使得建筑行業被列為我國高危行業之一。
⑶勞動生產率低。建筑設計過程中的過失造成工程的返工、項目數據的不準確和溝通中的失誤造成工程的返工,浪費了不少的人力、物力、時間。建筑施工過程中器械材料的運輸不及時、投放不準確使勞動生產效率降低。
建筑機器人的應用,降低了勞動力成本,提高了施工現場的安全水平及勞動力生產效率,在一定程度上解決了建筑行業面臨的困境。建筑機器人的發展目前處于初級階段,尚未形成統一的大規模生產[1]。世界上最早的建筑機器人誕生于20世紀90年代初期的德國,此后發達國家對建筑機器人的研究一直未中斷,但這些研究只停留在實驗室,并沒有被應用到實際的工程中[2]。近年來,隨著人們對建筑行業改革的迫切需要,建筑機器人技術才被逐漸應用到了工程實際中來。從概念上講,建筑機器人分為“狹義”和“廣義”兩種概念。“廣義”上的建筑機器人包括了建筑周期的全過程(包括勘測、營建、運營、維護、清拆、保護等)相關的所有機器人設備,涉及范圍十分廣泛,包括清洗、遞送、陪護等服務型機器人在內。“狹義”的建筑機器人指建筑施工過程中使用的機器人設備,涵蓋面窄并且具有十分清晰的工程特點,典型系統包括墻體砌筑機器人、3D打印營建系統、基坑清理機器人[2]。本文主要對“狹義”的建筑機器人及機器人爬架這一施工平臺加以介紹。
1 建筑機器人的發展狀況
1.1 墻體砌筑機器人
20世紀末期墻體建筑機器人的研究在國外各個高校研究機構中展開,1994年,德國卡爾斯魯厄理工學院(KIT)研發了自動砌墻機器人ROCCO;1996年,斯圖加特大學開發了混凝土施工機器人BRONCO;之后,哈佛大學、卡內基梅隆大學等機構也都開展過一些建筑機器人研[2]。但是,由于當時技術條件及經濟條件的限制,這些砌筑機器人僅處于研究階段,沒有應用于實際當中。第一臺真正作為商用的砌筑機器人是來自美國Construction Robotics公司的SAM100砌磚機器人,SAM100砌筑機器人采用半自動化工作模式,它的使用減少了砌筑過程所需要的時間,每臺SAM100砌筑機器人能提高3~5倍的工作效率[3]。此后,澳大利亞Fast Brick機器人公司歷時10年研發出世界上首臺全自動砌筑機器人“哈德良105”其原理為采用3D計算機提供的房型及結構布置,如圖1所示,精確計算出每塊磚的位置,然后用28m長的機械臂壘砌磚頭。“哈德良105”可以24h不間斷施工,并根據施工的需要裁切磚頭,預留管道位置。這種低成本高效率的施工方式既節約了勞動力成本,又提高了工作效率。其升級版“哈德良X”的出現有望徹底改變建筑行業的傳統砌筑模式,“哈德良X”體積更大,速度更快,與“哈德良105”一樣,都是裝在卡車上,可以自動游走,其施工原理為用特定的設備取磚,并放進傳送裝置,根據計算機系統程序選擇相應的作業流程,再由激光制導跟蹤儀和智能跟蹤傳感器指揮砌墻,除后期管道安裝外,全過程完全自動化操作[4]。與“哈德良105”相比,“哈德良X”能保證磚塊之間密實不松動,確保砌筑質量的同時又提高了砌筑的速度。缺點是“哈德良X”的體型過于龐大,只能在特定的空間內進行施工操作,不夠靈活便捷,并且造價高。

圖1 墻體砌筑機器人“哈德良105”
墻體砌筑機器人在國內還處于理論研究階段,未能真正運用到實際中,主要是一些高校為團體的研究隊伍在進行研究。如臺州職業技術學院設計的自動砌墻機器人機[5],如圖2a所示。其設計分為行走機構、升降機構、送料機構、機械手移動機構、機械手抓取機構五個部分,整體由單片機或數控系統控制,從而實現游走、升降、送磚、移動機械臂、抓取磚塊的動作;淮安職業技術學院的一種全自動化砌筑機器人模型[6],如圖2b所示。由三個機械臂、兩個旋轉步進電梯、一個直線步進電機組成,操作過程由機械臂搬磚壘墻,送磚進升降機,由電機操控將水泥噴進磚縫處,此砌筑機器人還可以由計算機操作實現全自動控制,整個施工流程全部擬人化進行,也可以人工操縱進行施工。
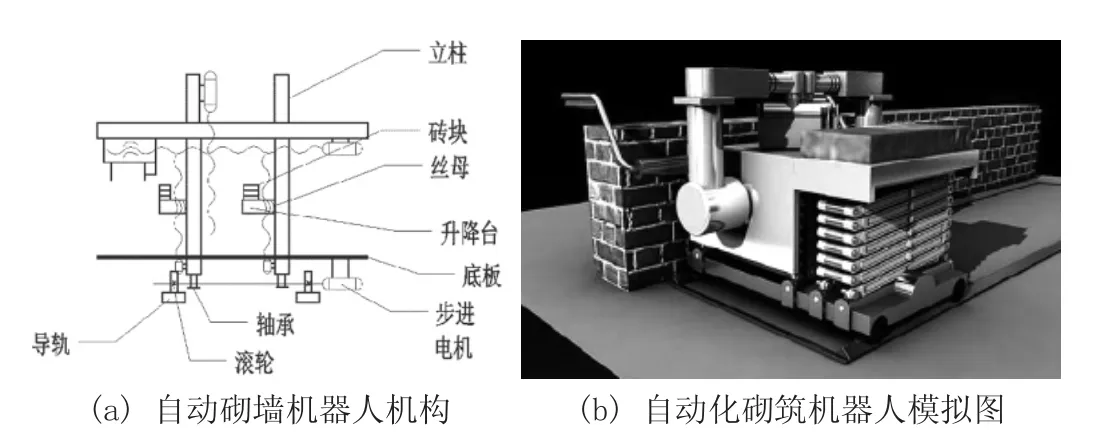
圖2
國內外對砌筑機器人的研究都在繼續,需要既符合建筑施工特點,又能靈活操控,并且建造成本低廉,在三者之間尋求一個平衡。
1.2 墻面/地面施工機器人
傳統的墻磚、地磚鋪貼需要花費大量的時間、人力和物力,但是鋪貼質量依然得不到保障,尤其是在大范圍施工過程中,因此機器人技術在鋪貼施工過程的應用應運而生。
早在2000年,Navon[7]就從概念上提出鋪貼機器人需要具備六個以上的自由度,這樣才能實現在其工作范圍內瓷磚的任意鋪貼及角度調整的靈活度和精準度。2001年Bailey[8]等人研發了一臺龍門機器人,如圖3所示,其任務不是用于鋪貼瓷磚,而是作為人類TRAX游戲的對手,由于其定位系統比較特別,采用機器人視覺系統來實現攝像機標定、瓦片檢測、定位、人類玩家檢測、機器人控制和游戲玩法,而鋪貼機器人研制的核心是定位系統的設計,所以該定位系統在一定程度上給研究砌筑機器人的專家學者們提供了一些靈感。

圖3 龍門機器人
2005年Hyeun Seok團隊研發了混合型機器人運用于瓷磚鋪貼,串聯構件由伺服電機來控制,并聯構件由氣動執行器來控制,但實際操作過程中出現的一些摩擦等非線性運動使運動精度不好把控,鋪貼定位精度略微小于3mm。隨著科技不斷向前,近幾年鋪貼機器人技術的研究取得很大進展,開始由實驗轉入實際應用中去。2014年新加坡未來城市實驗室聯合蘇黎世聯邦理工學院開發了一款的地地磚鋪貼機器人,如圖4所示。其定位系統采用4個以上的激光傳感器,基本實現對地磚的空間定位及平面定位。機器人由一支機械手和一個可自住導航的移動機器人平臺組成,機械手末端有吸盤和混凝土噴射口,兩套被安置在機械手的末端的傳感器分別用于識別地磚空間定位及地磚邊界區域,配合計算機的特定程序,以此保證鋪貼過程的精度。靈活小巧,不僅適用于大型公共建筑,也適合小型民居的地磚鋪貼使用。地磚鋪貼機器人研制及升級的核心部件為定位系統,目前的地磚鋪貼機器人需要使用4個以上的激光傳感器,過多的激光傳感器會令定位的精度減小,造成數據誤差,應該使激光傳感器的數量控制在一個合適的范圍之內,以此提升鋪貼機器人的定位準確度,目前的技術還有待改進。

圖4
1.3 清拆/清運機器人
在建筑物建造前的土方開挖,基坑挖掘以及廢舊建筑的拆除和改造過程中,設計大量的土石方清運和結構清拆任務。而目前現有的清運和清拆的施工過程,存在極大的危險性,如土方開挖和建筑拆除過程中,揚塵和噪音污染嚴重,清拆過程僅依靠人工駕駛機器設備進行,危險系數高,不僅對工人的生命安全存在威脅,并且這種作業方式會造成非常大的浪費,大批量混凝土當作垃圾處理掉,后期回收鋼筋的過程也造成了人力和物力的消耗。
為解決這一施工難題,有關機構研發了清拆機器人,其作業方式包括兩種:一種是“沖擊破碎”,一種是“分離回”[2]。由人工駕駛的清拆設備發展而來的為沖擊破碎作業方式,沖擊破碎作業方式利用搖桿操作代替了原有的人工駕駛,遙感操作使人員遠離了危險的作業地帶,方便了施工操作,保障了施工人員生命安全。這種作業方式的機器人大多小巧靈活,便于在室內或者小面積地段的作業,廣泛應用于應災救援、器械維修等領域,如圖5a為瑞典Husqvarna公司的DXR-310型遙控清拆機器人。分離回收方式作業的機器人代表瑞典Umea大學提出的ERO機器人如圖5b所示,將鋼筋與混凝土直接剝離,資源回收。ERO清拆機器人由移動體及機械臂兩部分組成,機械臂的末端配有高壓噴射裝置,令其對墻體進行沖刷,高壓噴頭噴射出來的水使混凝土破碎,掉落的混凝土漿體被真空吸塵器吸入,通過離心作用使水和混凝土漿體分撒開來,水泥漿被回收,水體被重新利用。

圖5
該系統目前還處于研制階段,并未投入使用,但其所涵蓋的理念符合《關于加快新型建筑工業化發展的若干意見》中倡導的資源再利用、綠色環保的理念,符合未來建筑行業施工的發展趨勢。目前我國有將高壓噴射裝置用于建筑清拆過程中,但是還沒有將資源回收再利用與高壓噴射裝置結合起來應用的技術,這塊可以作為一個研究方向進行發展。
1.4 3D打印機器人
3D打印機器人主要運用的技術有:輪廓工藝、D型工藝、混凝土打印、分段組裝式打印、群組機器人集合打印。
3D打印在建筑行業的應用起源于美國南加州大學Khoshnevis教授于20世紀90年代提出的“輪廓工藝”(Contour Crafting)技術,運用CC技術的機器人像是一個超級打印機器人,外形像一臺停在建筑物上的起重機,兩邊是軌道,中間的橫梁是機械臂,橫梁上下左右前后運動,將房子一層一層地打印出來。運用CC技術的機器人的工作速度非常快,24h之內能打印出一棟兩層樓高、232m2的房子[9]。CC技術目前可以利用混凝土當做材料,以預先設計好的圖紙為模板,將混凝土墻體和地面打印出來。CC技術的使用讓建筑體的形狀可以復雜多樣,形狀不再受直線限制,可隨意打印出各種曲線及異形結構來提升建筑物的整體美觀程度及空間利用率[2],其外形如圖6a所示。D型工藝由意大利發明家恩里克·迪尼發明,D型工藝打印機的底部有數百個可以噴射鎂質黏合物(氯氧鎂水泥)的噴嘴,其工作原理為噴嘴噴射鎂質黏合物,在黏合物上噴射砂子,通過砂子及黏合物的粘連,形成石質建筑物,例如位于意大利比薩的復雜雕塑的1/4縮尺模型,如圖6b所示。D型工藝打印出來的建筑物比混凝土強度高,表面十分堅硬,不需要再使用內置鐵管的方法進行建筑加固。2013年1月份,一位荷蘭建筑師與恩里克·迪尼合作,運用D型工藝技術在2014年完成了一棟建筑的建造建造,并以“Landscape-House”命名[10]。混凝土打印技術由英國拉夫堡大學建筑工程學院提出[11],其原理是使用噴嘴擠壓出混凝土再通過層疊法建造構件[12]。該團隊研發出一種適合3D打印的聚丙烯纖維混凝土,并測試了這種混凝土的基本力學性能[13],證實了該混凝土在混凝土打印技術中可以應用,該團隊還用該技術制造出了混凝土構件[14],如圖6c所示。組裝式打印技術其工作原理為將建筑模塊化,通過3D打印機將建筑模塊在工廠里打印出來,再運送至現場組裝,這種打印技術不僅可以打印簡單的模型,還可以打印出各種復雜的模型,使3D打印技術與建筑行業的結合更加緊密,如圖6d為組裝式打印制作的構件。3D打印機器人的優點不言而喻,其缺點也需要我們不斷改進,比如3D打印機器人的零部件及組裝成本相當高,其智能化的水平相對來說是比較低的;3D打印機器人的適用范圍受限,不能廣泛地應用于各類建筑中去;3D打印機器人所用材料十分受限。對3D打印機器人的研究還有很多的事情要做。

圖6
1.5 機器人爬架
傳統的外墻腳手架及落地式腳手架的搭設費時、費力、耗費鋼材,還容易出現安全隱患,因此,外墻腳手架及落地時腳手架正在被慢慢的淘汰掉,取而代之的是爬架[15]。爬架技術的使用,改變了高空作業及懸挑作業的高危險施工作業方式,使腳手架的高空搭設變成了低處搭設,施工期間如同室內作業,環保又美觀,大大地節約了鋼材。爬架最初的時候只是依靠簡單動力升降,操控復雜,進而開發了智能爬架,智能爬架仍然屬于自動化的范疇,隨著時代的發展,近幾年機器人技術在基于智能爬架的基礎上開發了機器人爬架,圖7a為機器人爬架主要結構。
機器人爬架的組成部分有左右機械臂、導軌、附著在建筑物上的固定件、防護平臺主體、升降系統和智能控制系統,如圖7b所示。機器人爬架的左側機械臂連接在內側導軌上,右側機械臂連接在外側導軌上,爬架的上升下降是通過左右機械臂的交替上升或者下降實現的。機器人爬架的提升需要機械臂解鎖才可進行下一步。因此,在安全提升狀態下,右機械臂松脫,直至有機械臂到達待建樓層后,右機械臂抓緊,隨后左機械臂運動使平臺進一步提升,智能系統會對平臺各點進行重力測量并預警,如果某個機位超過規定的限值,就會報警,如果超過危險值時,爬架就會停止升降。機器人爬架具有監測功能、人機交流、自動報警和遠程管理的特點,這使爬架具有更高的智能化程度。機器人爬架雖然已經初步具有了機器人的特征,但機械臂自由度不夠高,需要更多的智能化系統。

圖7
2 結論
建筑機器人是建筑領域與機器人領域的結合而產生的一個全新的領域,其應用范圍之廣可覆蓋建筑生命周期的全過程。建筑機器人要長期發展下去,必須從以下幾個方面去細細雕琢:
⑴輕質。傳統機器人的體型碩大,不利于其靈活移動,所需要的作業面也太過龐大,施工過程還需要較大的空間,一定程度上給施工作業造成了影響。可采用輕質的材料在許可的范圍內進行調整,優化建筑機器人的構造,在不改變原有功能的前提下縮小體型。
⑵靈敏。傳統建筑機器人的靈敏度不夠高,不能精確定位,往往存在一定的偏差,這不只是控制其量程精度就能夠解決的問題,利用尖端的材料往往會提高成本,在優化定位軌跡及結構的同時,融入多個傳感器和結合的算法,彌補原有的缺陷,并節約了成本,使施工作業的精度得到提高。
⑶智能。建筑機器人不會像老練的施工人員一樣,看一下就知道哪里有問題,建筑機器人只能根據其內部自帶的程序去判斷哪里出了問題,而編程程序不能預測到所有可能發生的故障問題,所以這時就需要讓建筑領域與機器人技術、大數據技術等領域相互結合,創造出具有多功能形態的建筑機器人。
猜你喜歡
現代裝飾(2022年5期)2022-10-13 08:48:04
建材發展導向(2022年10期)2022-07-28 03:04:00
北方建筑(2021年6期)2021-12-31 03:03:54
文苑(2020年10期)2020-11-07 03:15:36
現代裝飾(2020年6期)2020-06-22 08:43:12
水利規劃與設計(2020年1期)2020-05-25 08:01:30
上海建材(2019年6期)2019-08-13 06:49:34
小哥白尼(趣味科學)(2019年3期)2019-06-17 11:57:44
少兒科學周刊·兒童版(2015年6期)2015-11-24 03:49:38
中國建設信息化(2015年4期)2015-09-14 03:01:50